Пристрій для вимірювання параметрів поверхні об’єкта
Формула / Реферат
1. Пристрій для вимірювання параметрів поверхні об'єкта (12), який має розміщений на котушці (1) з можливістю розмотування продовгуватий гнучкий робочий елемент (2), на кінці якого передбачено зонд (3), причому передбачено два чутливі елементи, виконані з можливістю реєстрації розмотаного відрізка робочого елемента (2), та кута, під яким робочий елемент (2) розміщений відносно бази (5), і причому база (5) складається із пласкої опорної плити, а котушка (1) розміщена на стороні, протилежній до опорної поверхні (6) опорної плити, який відрізняється тим, що котушка (1) з'єднана з базою (5) пристрою з можливістю обертання навколо вертикальної осі (4') пристрою, орієнтованої перпендикулярно як до площини бази (5), так і до осі обертання котушки (1), а також тим, що горизонтальна вісь (13) котушки (1) розміщена на важелі (10), встановленому з можливістю обертання у вертикальній площині.
2. Пристрій за п. 1, який відрізняється тим, що передбачено натяжний засіб, переважно пружину, встановлену з можливістю передачі зусилля на продовгуватий гнучкий робочий елемент (2) для намотування на котушку (1).
3. Пристрій за п. 1 або 2, який відрізняється тим, що продовгуватим гнучким робочим елементом (2) є вимірювальна стрічка.
4. Пристрій за одним із пп. 1-3, який відрізняється тим, що опорна плита (5) має упорну кромку (7) для орієнтування пристрою на краю об'єкта.
5. Пристрій за одним із пп. 1-4, який відрізняється тим, що зонд (3) виконано як ручний елемент.
6. Пристрій за одним із пп. 1-5, який відрізняється тим, що зонд (3) має вістря (9).
7. Пристрій за п. 6, який відрізняється тим, що вістря (9) зонда виконане як контактний ролик (8) на кульковій опорі, вісь (15) якого орієнтована паралельно вертикальній осі (4') пристрою.
8. Пристрій за одним із пп. 1-7, який відрізняється тим, що вертикальна вісь (4') проходить через підшипниковий блок (4), з'єднаний з опорною плитою переважно з використанням магніту з можливістю відокремлення.
9. Пристрій за одним із пп. 1-8, який відрізняється тим, що принаймні один із чутливих елементів є магнітним чутливим елементом.
10. Пристрій за одним із пп. 1-9, який відрізняється тим, що пристрій виконаний з можливістю дистанційного керування.
11. Пристрій за одним із пп. 1-10, який відрізняється тим, що пристрій має передавач, переважно електронний передавач, зокрема передавач типу "блютус", виконаний з можливістю передачі даних вимірювання на вузол обробки даних.
12. Система для вимірювання параметрів поверхні об'єкта, до складу якої входять пристрій за будь-яким із пп. 1-11 та комп'ютер, причому система виконана з можливістю здійснення комунікативного зв'язку між пристроєм та комп'ютером.
13. Спосіб виготовлення покриття сходинок для сходів, який включає такі операції:
вимірювання параметрів поверхні сходинки за допомогою пристрою за будь-яким із пп. 1-11;
передача даних вимірювання параметрів поверхні на вузол обробки;
виготовлення покриття для сходинки згідно з отриманими даними.
Текст
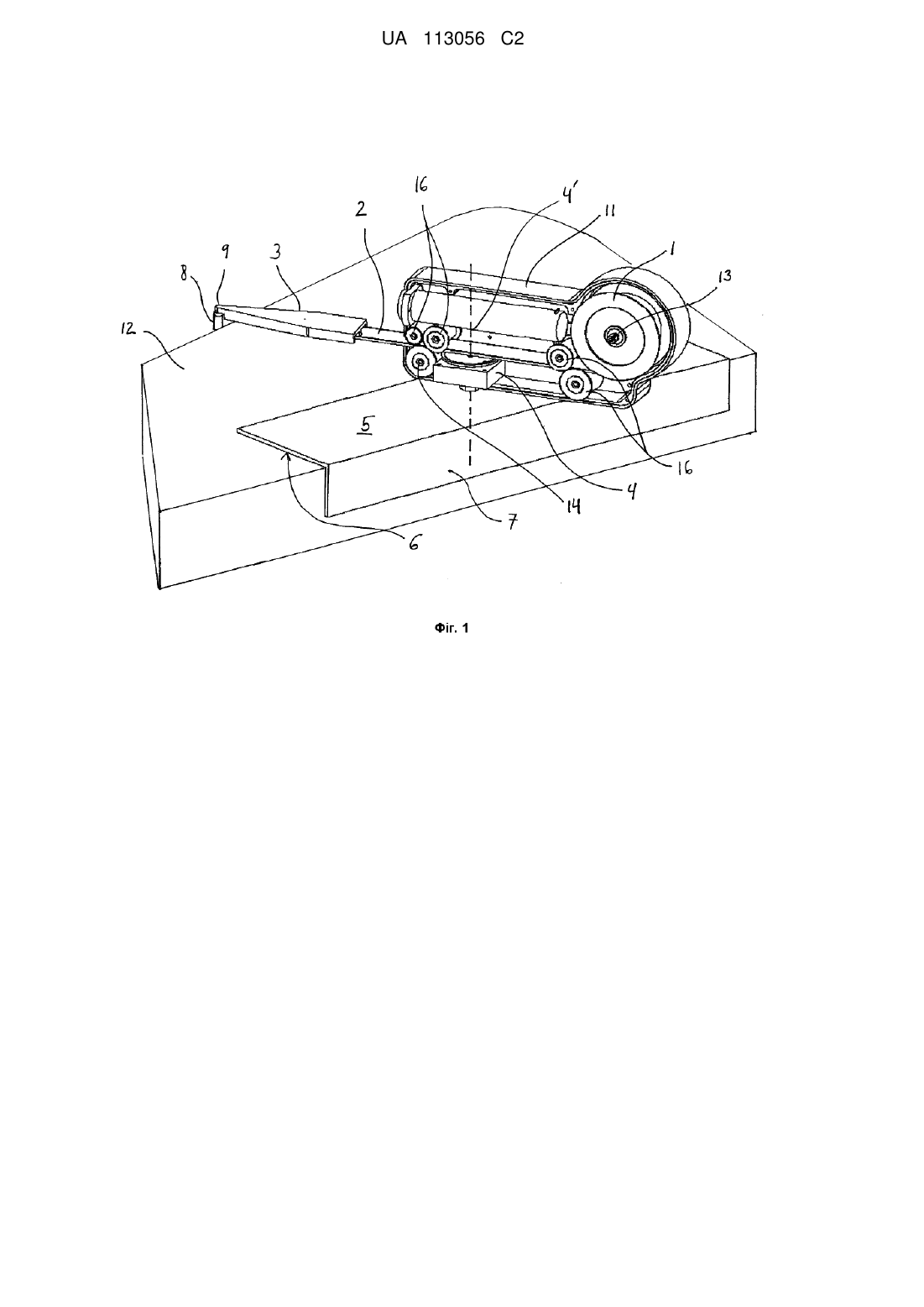
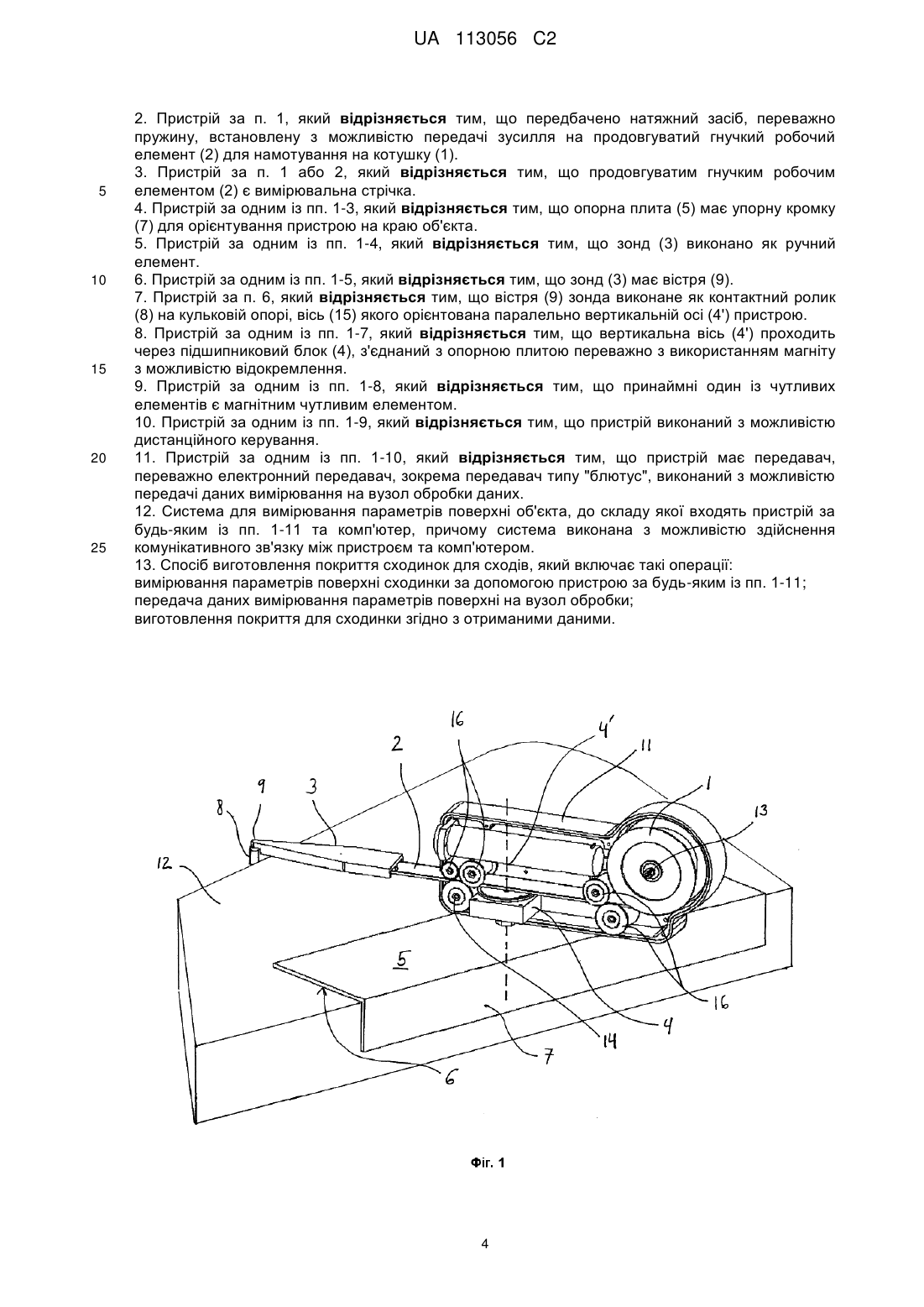
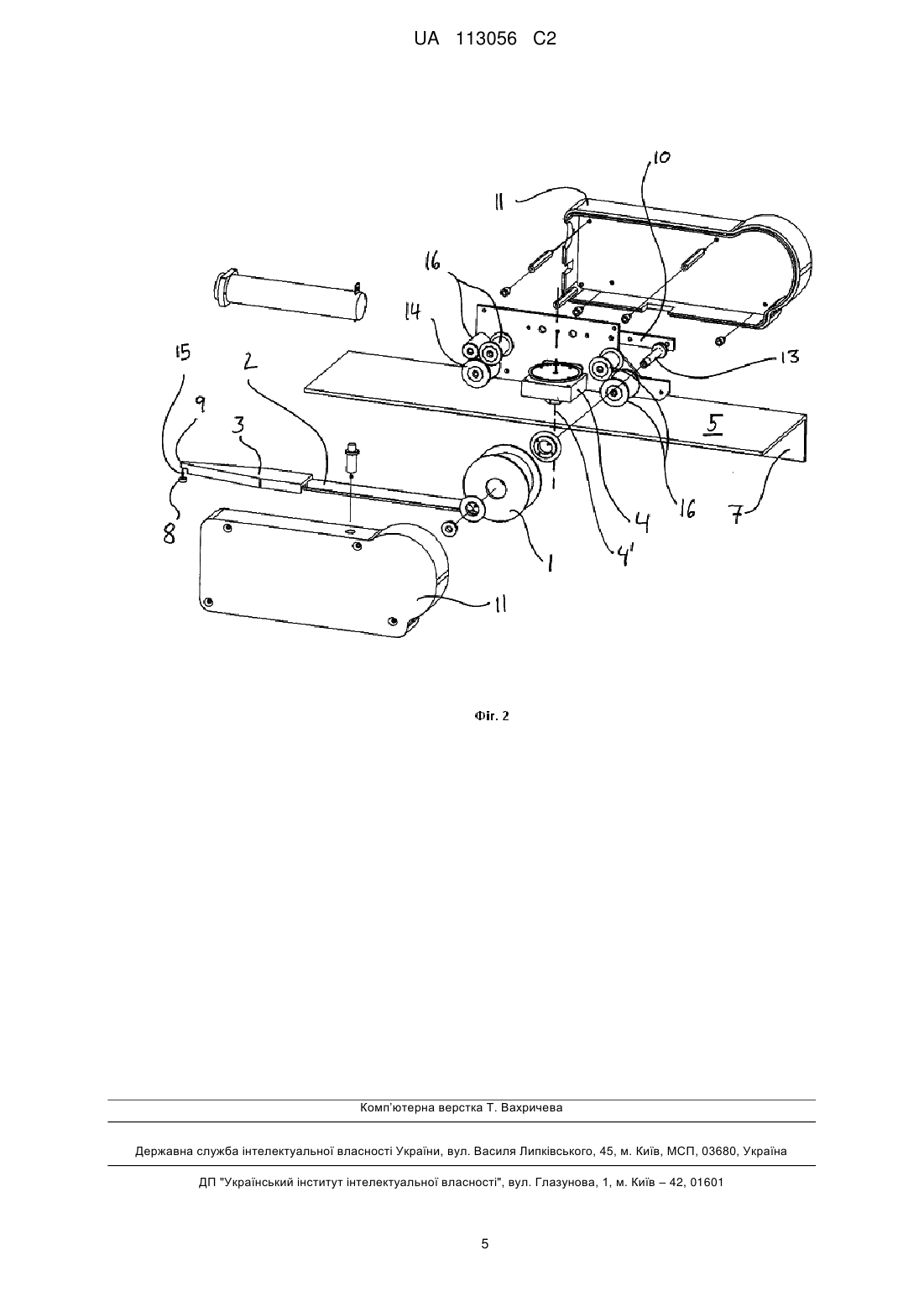
Реферат: Пристрій для вимірювання поверхні об'єкта (12), який має розміщений на котушці (1) з можливістю розмотування продовгуватий гнучкий робочий елемент (2), на кінці якого передбачено зонд (3), причому котушку (1) з'єднано з базою (5) пристрою з можливістю обертання навколо вертикальної осі (4') пристрою, а ще передбачено два чутливі елементи, які реєструють розмотаний відрізок робочого елемента (2), та кут, під яким робочий елемент (2) розміщений відносно бази (5), причому база (5) складається із пласкої опорної плити, а котушку (1) розміщено на стороні, протилежній до опорної поверхні (6) опорної плити. UA 113056 C2 (12) UA 113056 C2 UA 113056 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід стосується пристрою для вимірювання параметрів поверхні об'єкта, який має розміщений на котушці з можливістю розмотування продовгуватий гнучкий робочий елемент, на кінці якого передбачено зонд, причому котушку з'єднано з базою пристрою з можливістю обертання навколо вертикальної вісі пристрою, а ще передбачено два чутливі елементи, які реєструють розмотаний відрізок робочого елемента та кут, під яким котушка знаходиться відносно бази. Крім того, винахід стосується способу виготовлення покриття сходинок для сходів. В публікації ЕР 2157401 А1 описано пристрій для вимірювання протяжності об'єктів в трьох просторових вимірах. При цьому контури об'єкта досліджуються зондом вручну. Зонд за допомогою натягнутого троса з'єднано з базовим приладом, який може вимірювати довжину розмотаного троса та кут між тросом та базовим приладом. Ролик з тросом знаходиться у базовому приладі і може залишати його через кульковий шарнір. Сенсорні датчики на кульковому шарнірі вимірюють дійсне на певний момент вирівнювання з двома ступенями свободи. Із трьох отриманих даних електронним шляхом визначаються просторові координати. Цей пристрій придатний також для того, щоб здійснювати вимірювання в двох просторових параметрах, щоправда, механіка кулькового шарніру виконана з великих витратами задля мінімізації похибок вимірювань. Недолік полягає у тому, що обумовлені конструкцією витрати на вимірювання лише двомірних об'єктів є нерентабельними. В публікації US 6758973 B1 описано пристрій для вимірювання протяжності двомірних об'єктів, де у відомому пристрої кульковий шарнір замінено простим шарнірним з'єднанням, розташованим по вертикальній осі. Трос з зондом виводиться за допомогою консолі. Таким чином визначають лише кут зонда відносно пристрою (див. фіг. 1 в US 6758973 B1). Недолік цього рішення полягає в тому, що площина, у якій лежить консоль, знаходиться на відстані від вимірюваної поверхні об'єкта. Якщо, наприклад, пристрій стоїть на вимірюваній поверхні об'єкта, то зонд має спускатися на цю поверхню зверху, що хоча і є можливим завдяки гнучкості троса, але може призвести до похибки у вимірюванні. В публікації US 2009/0056159 описаний інструмент для збільшення об'єктів складної форми, в якому один кінець висувної вимірювальної стрічки з можливістю обертання з'єднаний з базою, а на другому встановлений зонд, яким вручну можна обводити контур об'єкта складної форми. Недоліком цього пристрою є те, що висувна вимірювальна стрічка при витягуванні і втягуванні без додаткових запобіжних заходів рухається нерівномірно, що призводить до похибки вимірювання. В публікації US 5004870 розкритий оцифровувальний пристрій з полярними координатами, в якому один кінець шнура з можливістю обертання з'єднаний з базою, а на другому встановлений зонд, яким вручну можна обводити контур об'єкта складної форми. Недоліком цього пристрою є те, що шнур не має шкали для візуального контролю процесу вимірювання. В публікації US 4500749 розкритий оцифровувальний пристрій у формі вимірювального стола для кодування геометричних форм. Недоліком цього пристрою є те, що вимірюваний об'єкт має бути меншим, ніж вимірювальний стіл. В публікації US 5782007 розкрита вимірювальна стрічка, переобладнана на напрямний елемент для інструмента. При цьому на вільному кінці розмотуваної стрічки закріплений адаптер, в який може бути вставлений ніж або креслярський інструмент. Вимірювальна стрічка встановлена на базі з можливістю обертання. За її допомогою дуже просто може бути вирізаний, наприклад сегмент кола із аркуша паперу або намальований на ньому. Перед винаходом стоїть задача створити такий пристрій вищезгаданого типу, який би дозволяв вимірювати поверхні з незначною похибкою і який би мав просту і міцну та економічно вигідну конструкцію. Пристрій згідно з винаходом відрізняється тим, що база складається із опорної плити, а котушка розташована на стороні, протилежній від опорної поверхні опорної плити. Доцільна форма виконання пристрою відрізняється тим, що передбачено натяжний засіб, переважно пружину, яка передає зусилля на продовгуватий гнучкий робочий елемент з метою намотування на котушку. В одній із форм виконання винаходу продовгуватим гнучким елементом є вимірювальна стрічка. В іншій формі виконання винаходу котушку встановлено на поворотному важелі, за допомогою якого вісь котушки може здійснювати повторюваний рух у напрямку бази. При іншому виконанні винаходу опорна плита має упорну кромку для вирівнювання пристрою відносно кромки об'єкта. 1 UA 113056 C2 5 10 15 20 25 30 35 40 45 50 55 60 У ще одній формі виконання винаходу зонд виконано як ручний елемент, причому він переважно має вістря. При цьому вістря зонду виконано у формі контактного ролика на кулькових опорах, і вісь ролика орієнтована паралельно вертикальній осі пристрою. В іншій формі виконання винаходу вертикальна вісь проходить крізь підшипниковий блок, з'єднаний з опорною плитою переважно магнітним способом з можливістю відокремлення. Згідно з іншою формою виконання винаходу принаймні один із чутливих елементів є магнітним чутливим елементом. Доцільно, щоб пристрій згідно з винаходом був регульований за допомогою дистанційного управління. Крім того, доцільно, щоб пристрій мав передавальний засіб, краще електронний, зокрема передавач "блютус" (Bluetooth), який надсилає дані вимірювання на вузол обробки. Винахід стосується також системи вимірювання параметрів об'єкта, яка складається із пристрою згідно з винаходом та комп'ютера, причому може бути забезпечений комунікативний зв'язок між пристроєм та комп'ютером. Винахід також має задачу створити спосіб виготовлення покриття для сходів. Він має дозволити швидко та просто виготовляти покриття для сходинок з індивідуальними параметрами поверхні. Спосіб згідно з винаходом досягає цього за допомогою таких операцій: вимірювання параметрів площі сходинок за допомогою пристрою згідно з винаходом; передача даних вимірювання до вузла обробки; виготовлення покриття сходинок згідно з переданими даними. Далі винахід пояснюється більш детально на прикладі форми виконання, зображеного на кресленнях. Вони зображують: Фіг. 1 - Загальний вид пристрою на вимірюваному об'єкті у перспективі. Фіг. 2 - Ізометричне представлення пристрою у розібраному стані. Пристрій для вимірювання параметрів об'єкта на фіг. 1 лежить разом з базою 5 на поверхні об'єкта 12, що підлягає вимірюванню. Поверхня може бути пластиною чи плитою будь-якої форми і належати будь-якому предмету з достатньою жорсткістю. Об'єкт 12 може мати будьякий контур кромок, досконалу, придатну для визначення лінію або зовсім не мати жодної визначеної форми. Звісно, точність вимірювання зростає, коли поверхня має незначні нерівності. Далі процес вимірювання висвітлено за допомогою прикладу з об'єктом 12 у вигляді пластини з контуром кромок, як це показано на фіг. 1. На базі 5 знаходиться встановлений з можливістю повороту корпус 11, в якому на горизонтальній осі 13 встановлена котушка 1 з намотаним гнучким робочим елементом 2, здатним до розмотування. На тому кінці елемента 2, що знаходиться за межами корпуса 11, передбачено зонд 3, який, наприклад, можна вручну витягати з корпуса 11, причому елемент 2 розмотується з котушки 1. Коли зонд 3 знову наближається до корпуса 11, робочий елемент намотується на котушку 1 за допомогою натяжного засобу. Максимальна довжина розмотаного елемента може, наприклад, становити два метра або більше. Система, що складається із котушки 1, робочого елемента 2, зонда 3 та натяжного засобу, відома, наприклад, по традиційним металевим вимірювальним стрічкам. Корпус 11 із котушкою 1 встановлено на базі 5 з можливістю обертання. Обертання / здійснюється навколо вертикальної осі 4 підшипникового блоку 4, який при вимірюванні поверхні знаходиться у максимально перпендикулярному положенні відносно бази 5 та / поверхні. В зображеному на фіг. 1 прикладі вертикальна вісь 4 складається із розташованого на прямокутній опорі підшипника, який може бути жорстко з'єднаний з корпусом 11. Якщо тепер зонд 3 вести вздовж будь-якого контуру поверхні об'єкта 12, котушка 1 завжди / буде обертатися навколо вертикальної вісі 4 таким чином, що виникає безпосередній зв'язок між зондом 3 та котушкою 1; до того ж елемент 2 завжди розмотується з котушки 1 або намотується на неї, будучи туго натягнутим між зондом 3 та котушкою 1. Отже, коли зонд 3 обводить контури поверхні, створюються дві координати: кут між котушкою 1 і відповідно корпусом 11 та базою 5 і відрізок елемента 2, що був розмотаний в залежності від кута. Обидві координати реєструються електронним шляхом з використанням чутливих елементів в корпусі 11 і за допомогою комп'ютера можуть бути обчислені з утворенням плану поверхні. Без великих затрат, як при ручному вимірюванні, реєструються вимірювання гострих кутів та індивідуальних викривлень на площині поверхні. Після обведення контуру та обчислення отриманих даних вимірювання є завершеним. / Вигідно, коли вісь 13 котушки 1 орієнтована перпендикулярно до вертикальної осі 4 , оскільки в цьому випадку при змотуванні елемента 2 не виникає різних гострих кутів, які негативно впливали б на точність вимірювання. В зображеній на фіг. 1 формі виконання це 2 UA 113056 C2 5 10 15 20 25 30 35 40 45 стосується також осі напрямного ролика 14, оскільки напрямний ролик 14 визначає, з яким напрямленням елемент 2 залишає корпус 11. На фіг. 2 зображено частини альтернативної форми виконання пристрою у розібраному стані. Тут котушку 1 встановлено на поворотному важелі 10. Таким чином вісь 13 котушки 1 може опускатися. Тут береться до уваги, що робочий елемент 2 при збільшенні розмотуваного відрізка досягає напрямного ролика 14 під більшим кутом від центра котушки 1, ніж від її периферії. Навіть до передбачених додаткових центрувальних роликів 16 робочий елемент 2 надходив би за умови змінюваного кута від котушки 1, доки ця котушка не рухається в напрямку бази зі зростанням розмотуваного відрізка. Коли робочий елемент 2 під час вимірювання або після нього знову стає вільним, він відтак намотується на котушку 1, яка потім знову рухається на поворотному важелі 10 вгору, тобто у напрямку від бази. При цій формі виконання потрібно передбачити достатньо вільного простору для руху котушки 1 у корпусі 11. Для полегшеного застосування та підвищення точності вимірювання вістря 9 зонду має контактний ролик 8. Таким чином зонд 3 при обведенні притискається до контуру об'єкта 12. Внаслідок цього виключаються неточності вимірювання в результаті зміщення зонду 3. Вісь обертання 15 контактного ролика 8 задля подальшого підвищення точності вимірювання / орієнтована паралельно до вертикальної осі 4 . Додатково база 5 може мати упорну кромку 7. Це сприяє більш стабільній посадці бази при вимірюванні об'єктів, що мають принаймні одну пряму кромку достатньої довжини. Такі об'єкти можуть бути, наприклад, сходинками для сходів, які після вбудовування в сходову клітку мають індивідуальний розмір, але одночасно також прямий край. Стабільна посадка бази 5 є передумовою для точного вимірювання. Електронні чутливі елементи всередині корпуса 11 вимірюють кут між корпусом 11 і базою, а також розмотаний відрізок робочого елемента 2. З рівня техніки відомі чутливі елементи, наприклад магнітні, які без механічних зусиль створюють електричні сигнали, що підлягають подальшій електронній обробці. Дані вимірювання можуть бути надіслані на зовнішній приймач за допомогою радіозв'язку. Приймач може бути комп'ютером, який на підставі часових характеристик парних даних вимірювання (кут корпусу 11 та розмотаний відрізок робочого елемента 2) обчислює контурний план об'єкта 12. Для радіозв'язку можна застосовувати звичні методи, такі як "блютус", інфрачервоний тощо. Радіозв'язок з пристроєм може бути використаний для дистанційного управління, за допомогою якого можна, наприклад, ініціювати в певний момент початок та закінчення вимірювання. Для покращення використання та точності вимірювання проблемні місця контуру об'єкта можна неодноразово раз по раз обводити зондом 3. Програма обробки даних у такому випадку передбачає багато варіантів розмотуваної довжини робочого елемента 2 для відповідного кутового діапазону і до того ж може обраховувати середнє значення або - залежно від потреби максимальне чи мінімальне значення. Для полегшення транспортування пристрою корпус 11 може зніматися з бази 5. Здійснювати цю операцію можна, наприклад, завдяки тому, що підшипниковий блок 4, через який проходить / вертикальна вісь 4 , прикріплюється до бази 5 магнітом. У такому випадку підшипниковий блок 4 під час вимірювання жорстко з'єднується з базою 5, а після вимірювання може легко відділятися від бази 5 шляхом перекидання корпусу 11. Зрозуміло, що описані приклади виконання можуть бути різним чином змінені в рамках ідеї винаходу, наприклад, стосовно робочого елемента, який також може бути стальним тросом тощо, а також стосовно натяжного засобу або чутливих елементів. ФОРМУЛА ВИНАХОДУ 50 55 60 1. Пристрій для вимірювання параметрів поверхні об'єкта (12), який має розміщений на котушці (1) з можливістю розмотування продовгуватий гнучкий робочий елемент (2), на кінці якого передбачено зонд (3), причому передбачено два чутливі елементи, виконані з можливістю реєстрації розмотаного відрізка робочого елемента (2), та кута, під яким робочий елемент (2) розміщений відносно бази (5), і причому база (5) складається із пласкої опорної плити, а котушка (1) розміщена на стороні, протилежній до опорної поверхні (6) опорної плити, який відрізняється тим, що котушка (1) з'єднана з базою (5) пристрою з можливістю обертання навколо вертикальної осі (4') пристрою, орієнтованої перпендикулярно як до площини бази (5), так і до осі обертання котушки (1), а також тим, що горизонтальна вісь (13) котушки (1) розміщена на важелі (10), встановленому з можливістю обертання у вертикальній площині. 3 UA 113056 C2 5 10 15 20 25 2. Пристрій за п. 1, який відрізняється тим, що передбачено натяжний засіб, переважно пружину, встановлену з можливістю передачі зусилля на продовгуватий гнучкий робочий елемент (2) для намотування на котушку (1). 3. Пристрій за п. 1 або 2, який відрізняється тим, що продовгуватим гнучким робочим елементом (2) є вимірювальна стрічка. 4. Пристрій за одним із пп. 1-3, який відрізняється тим, що опорна плита (5) має упорну кромку (7) для орієнтування пристрою на краю об'єкта. 5. Пристрій за одним із пп. 1-4, який відрізняється тим, що зонд (3) виконано як ручний елемент. 6. Пристрій за одним із пп. 1-5, який відрізняється тим, що зонд (3) має вістря (9). 7. Пристрій за п. 6, який відрізняється тим, що вістря (9) зонда виконане як контактний ролик (8) на кульковій опорі, вісь (15) якого орієнтована паралельно вертикальній осі (4') пристрою. 8. Пристрій за одним із пп. 1-7, який відрізняється тим, що вертикальна вісь (4') проходить через підшипниковий блок (4), з'єднаний з опорною плитою переважно з використанням магніту з можливістю відокремлення. 9. Пристрій за одним із пп. 1-8, який відрізняється тим, що принаймні один із чутливих елементів є магнітним чутливим елементом. 10. Пристрій за одним із пп. 1-9, який відрізняється тим, що пристрій виконаний з можливістю дистанційного керування. 11. Пристрій за одним із пп. 1-10, який відрізняється тим, що пристрій має передавач, переважно електронний передавач, зокрема передавач типу "блютус", виконаний з можливістю передачі даних вимірювання на вузол обробки даних. 12. Система для вимірювання параметрів поверхні об'єкта, до складу якої входять пристрій за будь-яким із пп. 1-11 та комп'ютер, причому система виконана з можливістю здійснення комунікативного зв'язку між пристроєм та комп'ютером. 13. Спосіб виготовлення покриття сходинок для сходів, який включає такі операції: вимірювання параметрів поверхні сходинки за допомогою пристрою за будь-яким із пп. 1-11; передача даних вимірювання параметрів поверхні на вузол обробки; виготовлення покриття для сходинки згідно з отриманими даними. 4 UA 113056 C2 Комп’ютерна верстка Т. Вахричева Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring surface dimensions of an object
Автори англійськоюPuchegger, Alfred
Автори російськоюПухеггер Альфред
МПК / Мітки
МПК: G01B 5/004, G01B 3/10, G01B 7/004
Мітки: пристрій, об'єкта, вимірювання, поверхні, параметрів
Код посилання
<a href="https://ua.patents.su/7-113056-pristrijj-dlya-vimiryuvannya-parametriv-poverkhni-obehkta.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання параметрів поверхні об’єкта</a>
Спосіб та пристрій безконтактного вимірювання параметрів шорсткої поверхні
Номер патенту: 109574
Опубліковано: 10.09.2015
Автори: Зворський Валентин Іванович, Павліков Володимир Володимирович, Аксьонов Євген Олександрович, Волосюк Валерій Костянтинович, Шматко Олександр Олександрович, Гайдачук Олександр Віталійович
МПК: G01B 11/30
Мітки: поверхні, параметрів, безконтактного, пристрій, шорсткої, вимірювання, спосіб
Формула / Реферат:
1. Спосіб вимірювання параметрів шорсткої поверхні, який полягає в тому, що когерентним випромінюванням утворюють на досліджуваній поверхні засвічену область, реєструють спекл-зображення з двох кутів матричними оптичними приймачами, з подальшою обробкою в ЕОМ, який відрізняється тим, що досліджувану поверхню освітлюють трьома сформованими та суміщеними когерентними променями з різними довжинами хвиль, реєструють повноколірні...
Пристрій для вимірювання температури рухомої поверхні
Номер патенту: 31523
Опубліковано: 15.12.2000
Автори: Курітник Ігор-Петро Петрович, Ванкевич Петро Іванович
МПК: G01K 13/00
Мітки: поверхні, пристрій, вимірювання, рухомої, температури
Текст:
...температури рухомої поверхні, виконаний в вигляді кільця із вмонтованою батареєю термопар Г А.с. СРСР № 445859,11113G01 ійЗ/04, 1974 рЛ Даний пристрій не забезпечує необхідної точності вимірювань за рахунок наявності в його конструкції складного колекторного вузла із ковзним струмознімачем, котрий вносить суттєві похибки з результат вимірюваная. Найбільш Слизьким по технічній суті до запропонованого являється пристрій для вимірювання...
Пристрій для вимірювання температури рухомої поверхні
Номер патенту: 37808
Опубліковано: 15.05.2001
Автор: Ванкевич Петро Іванович
МПК: G01K 13/00, G01K 3/00
Мітки: поверхні, температури, вимірювання, рухомої, пристрій
Формула / Реферат:
1. Пристрій для вимірювання температури рухомої поверхні, що містить термочутливий елемент, на якому встановлена з можливістю поздовжнього переміщення золотникова гайка та втулка у вигляді двоступінчатого кругового циліндра, який відрізняється тим, що втулка виконана пустотілою і містить поршень з ущільнюючими кільцями, розташований з можливістю зворотно-поступального переміщення в її внутрішній порожнині, та дві пружини, встановлені...
Пристрій для вимірювання температури рухомої поверхні
Номер патенту: 24976
Опубліковано: 25.07.2007
Автори: Ніщенко Іван Олексійович, Ванкевич Петро Іванович, Іваник Євгеній Григорович
МПК: G01K 13/00
Мітки: вимірювання, пристрій, температури, рухомої, поверхні
Формула / Реферат:
Пристрій для вимірювання температури рухомої поверхні, що містить термочутливий елемент, золотникову гайку, втулку у вигляді кругового циліндра та поршень, розташований з можливістю зворотно-поступального переміщення у внутрішній порожнині втулки, який відрізняється тим, що термочутливий елемент нерухомо закріплено на площині поршня зі сторони рухомої поверхні, а можливість зворотно-поступального переміщення поршня забезпечена гвинтовою...
Пристрій для вимірювання геометричних параметрів локального об’єкта
Номер патенту: 92770
Опубліковано: 10.09.2014
Автори: Горбунов Олег Андрійович, Горбунов Олександр Олегович
МПК: A61B 5/103, G01B 11/00
Мітки: вимірювання, параметрів, об'єкта, локального, пристрій, геометричних
Формула / Реферат:
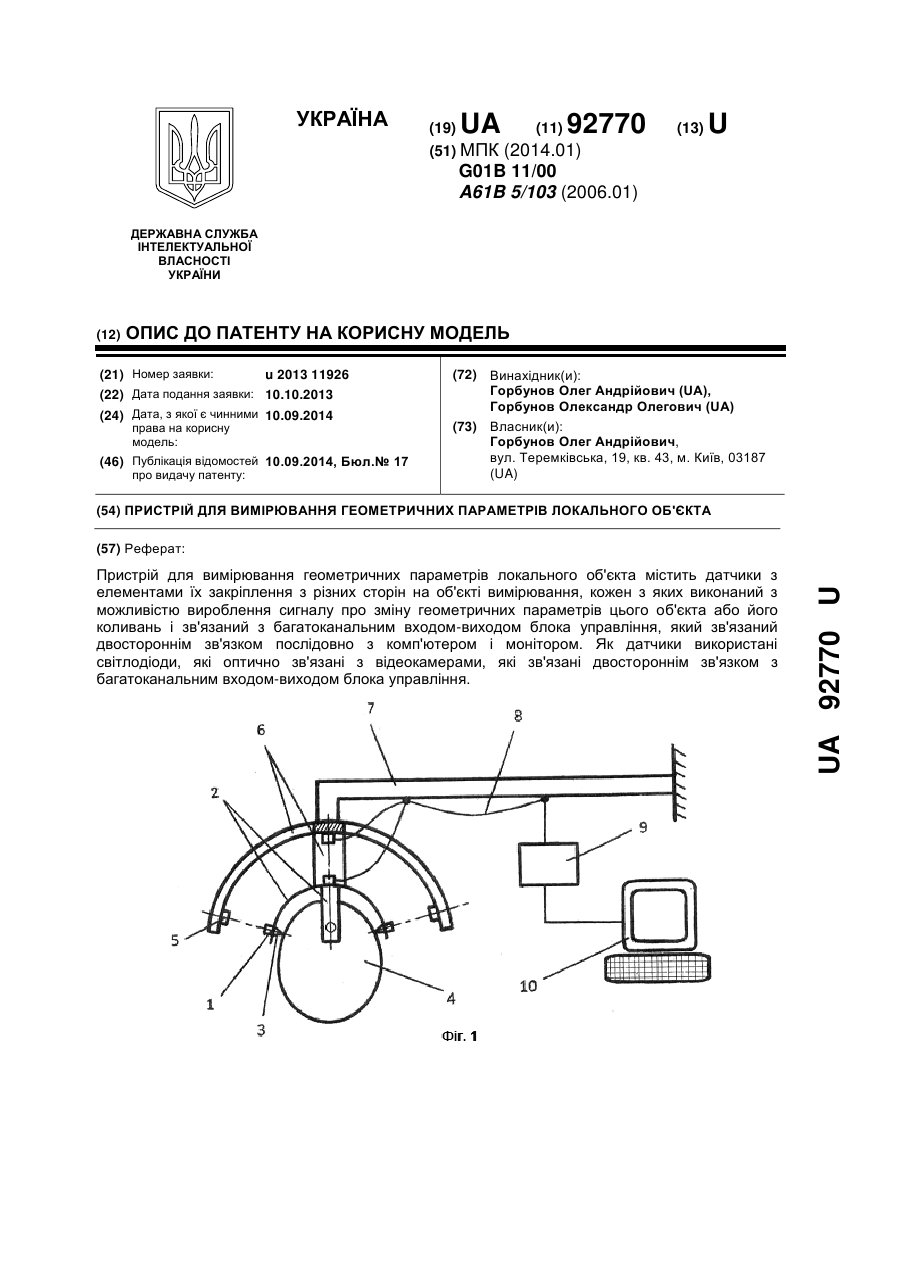
1. Пристрій для вимірювання геометричних параметрів локального об'єкта, який містить датчики з елементами їх закріплення з різних сторін на об'єкті вимірювання, кожен з яких виконаний з можливістю вироблення сигналу про зміну геометричних параметрів цього об'єкта або його коливань і зв'язаний з багатоканальним входом-виходом блока управління, який зв'язаний двостороннім зв'язком послідовно з комп'ютером і монітором, який відрізняється тим,...
Попередній патент: Універсальний пристрій для концентрації енергії
Наступний патент: Спосіб виробництва 2-етокси-1-((2′-((гідроксіаміно)імінометил)біфеніл-4-іл)метил)-1н-бензо[d]імідазол-7-карбонової кислоти та її естерів
Випадковий патент: Система визначення рівня матеріальної винагороди при мотивації працівників