Універсальна землерийна машина
Номер патенту: 114779
Опубліковано: 25.07.2017
Автори: Дмитриченко Микола Федорович, Коваль Андрій Борисович, Білякович Микола Олексійович, Мусійко Володимир Данилович, Дем'янюк Володимир Андрійович, Тесленко Ігор Олександрович, Лазарук Юрій Володимирович


Формула / Реферат
1. Універсальна землерийна машина, що включає проміжну раму, шарнірно з'єднану з тягачем, раму робочого органу, шарнірно з'єднану з протилежним від тягача кінцем проміжної рами, незалежні гідроциліндри з регульованими гідронасосами і систему управління подачами гідронасосів, пристосовану для того, щоб за час коливального переміщення робочого органу в горизонтальній площині із одного крайнього положення в інше крайнє положення вектор проекції цього коливального переміщення робочого органу на напрямок переміщення тягача був практично рівним за величиною вектора переміщення тягача і протилежним йому за напрямком, яка відрізняється тим, що проміжна рама і рама робочого органу пов'язані між собою з можливістю перетворення обертового руху проміжної рами під час руху тягача в лінійно-ступінчасту траєкторію ріжучої частини робочого органу (точки R), причому лінійні ділянки цієї траєкторії, які утворюються при коливальному переміщенні робочого органу по всій ширині котловану від одного крайнього положення до іншого крайнього положення, а потім у зворотному напрямку, перпендикулярні до поздовжньої осі тягача і паралельні між собою, а віддаль між ними дорівнює заданій товщині стружки ґрунту.
2. Машина за п. 1, яка відрізняється тим, що алгоритм взаємодії проміжної рами і рами робочого органу на лінійній ділянці траєкторії описується рівнянням
![]()
а на дугоподібній ділянці траєкторії
![]()
де ![]() - кут повороту рами робочого органу відносно проміжної рами;
- кут повороту рами робочого органу відносно проміжної рами; ![]() - кут повороту проміжної рами відносно поздовжньої осі тягача; S - товщина стружки ґрунту; В - ширина котловану.
- кут повороту проміжної рами відносно поздовжньої осі тягача; S - товщина стружки ґрунту; В - ширина котловану.
3. Машина за п. 1 або 2, яка відрізняється тим, що кутова швидкість ![]() проміжної рами постійна для заданого поєднання значень ширини котловану В, товщини стружки ґрунту S і поздовжньої швидкості тягача Vпт.
проміжної рами постійна для заданого поєднання значень ширини котловану В, товщини стружки ґрунту S і поздовжньої швидкості тягача Vпт.
Текст
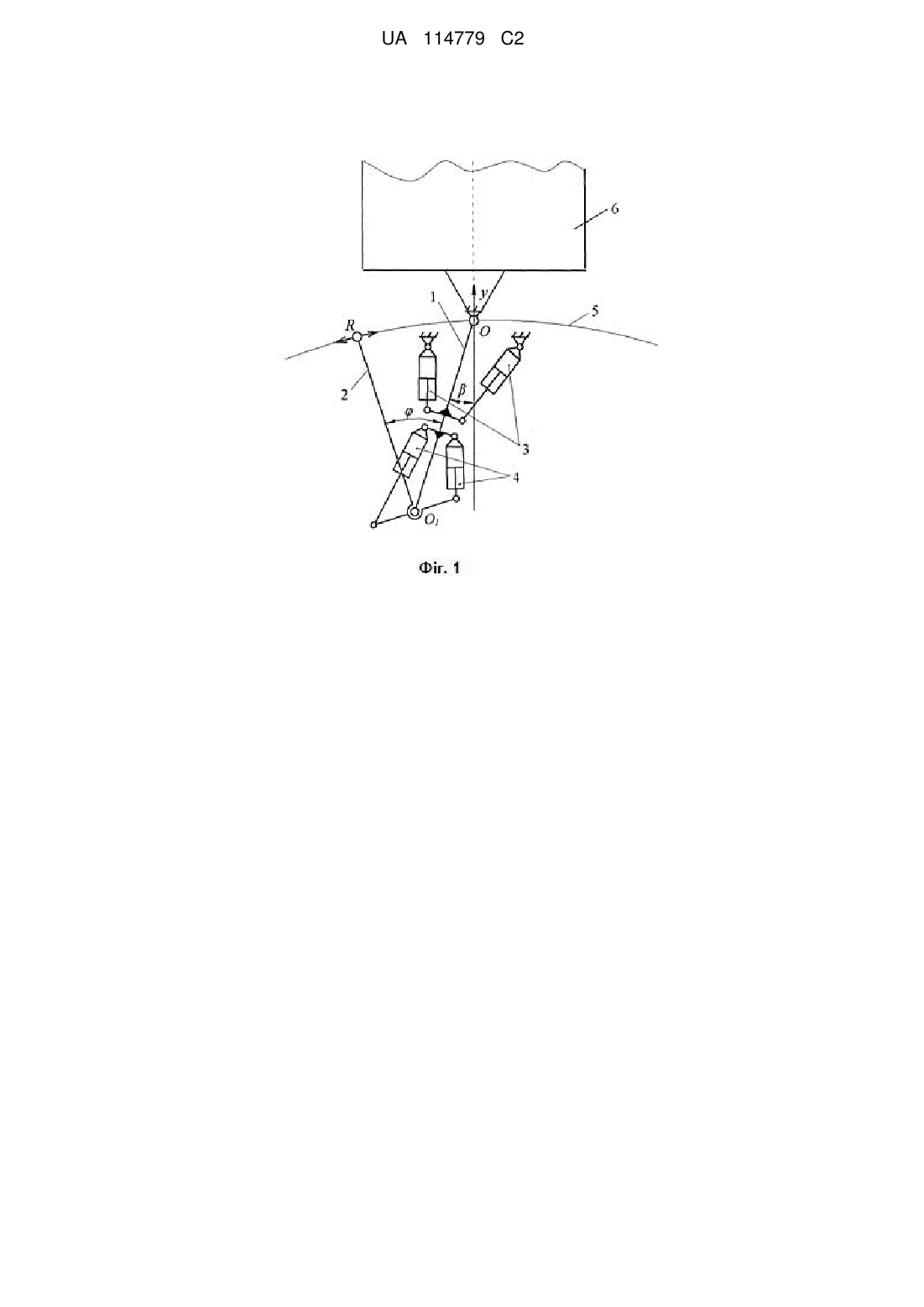
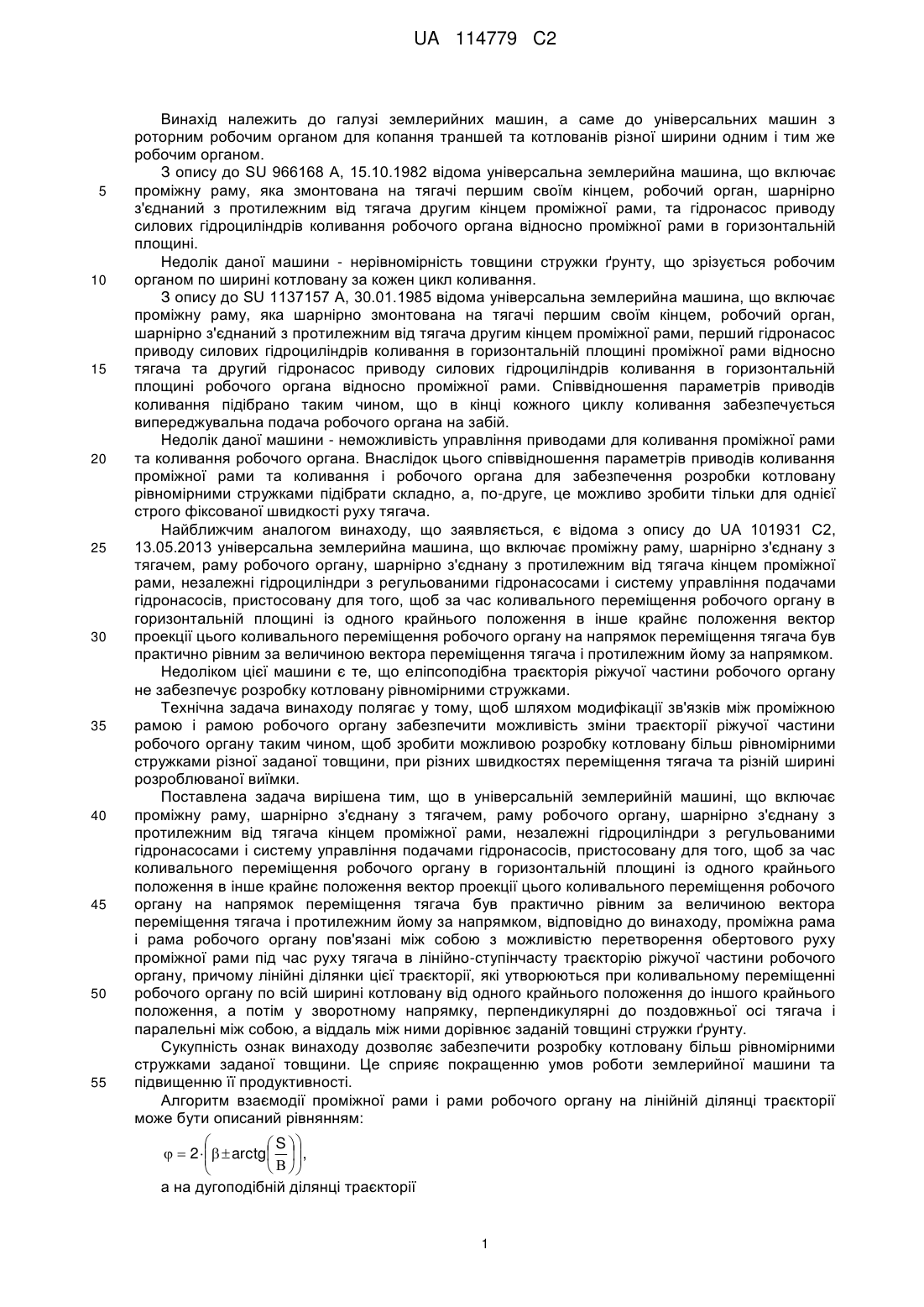
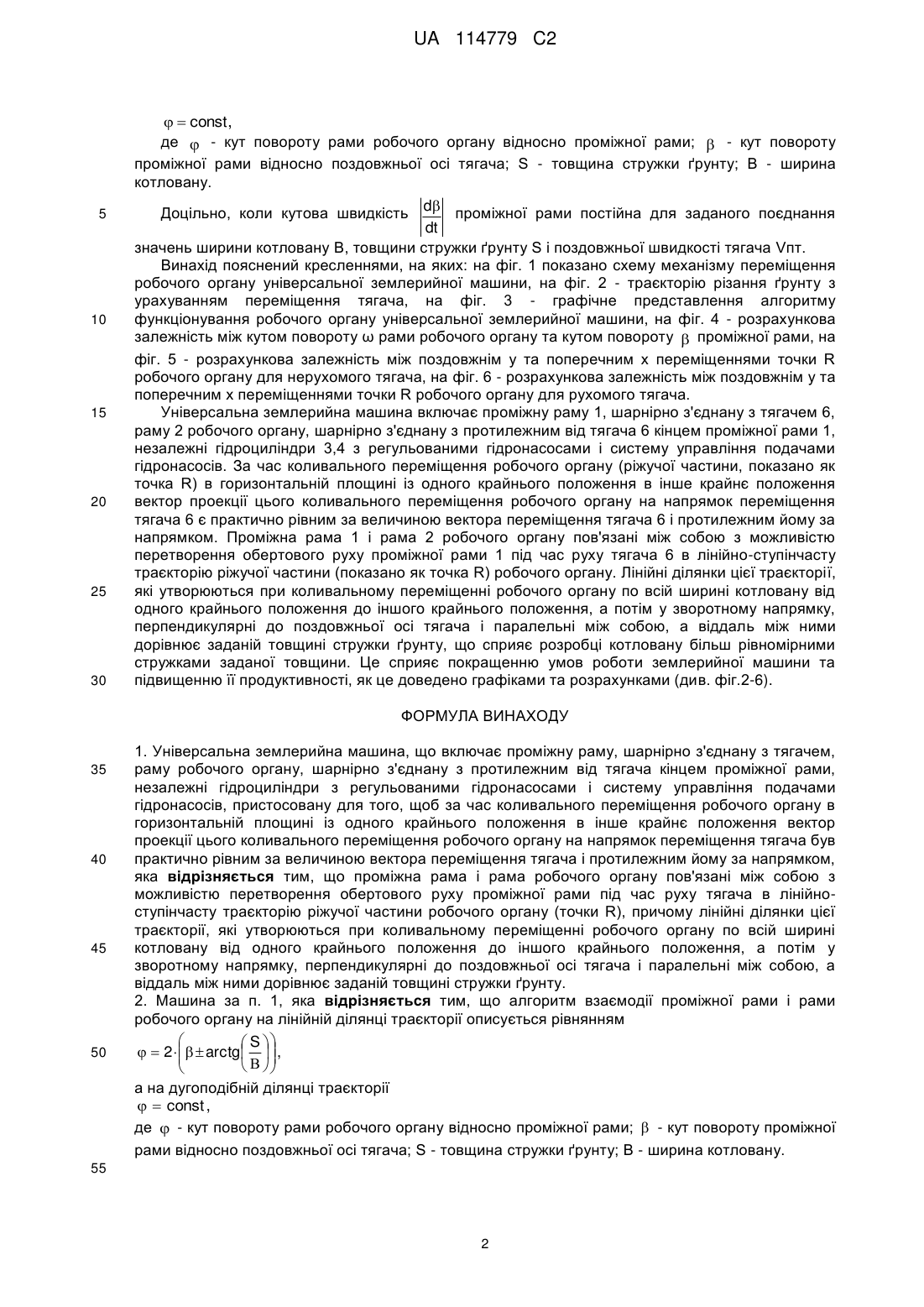
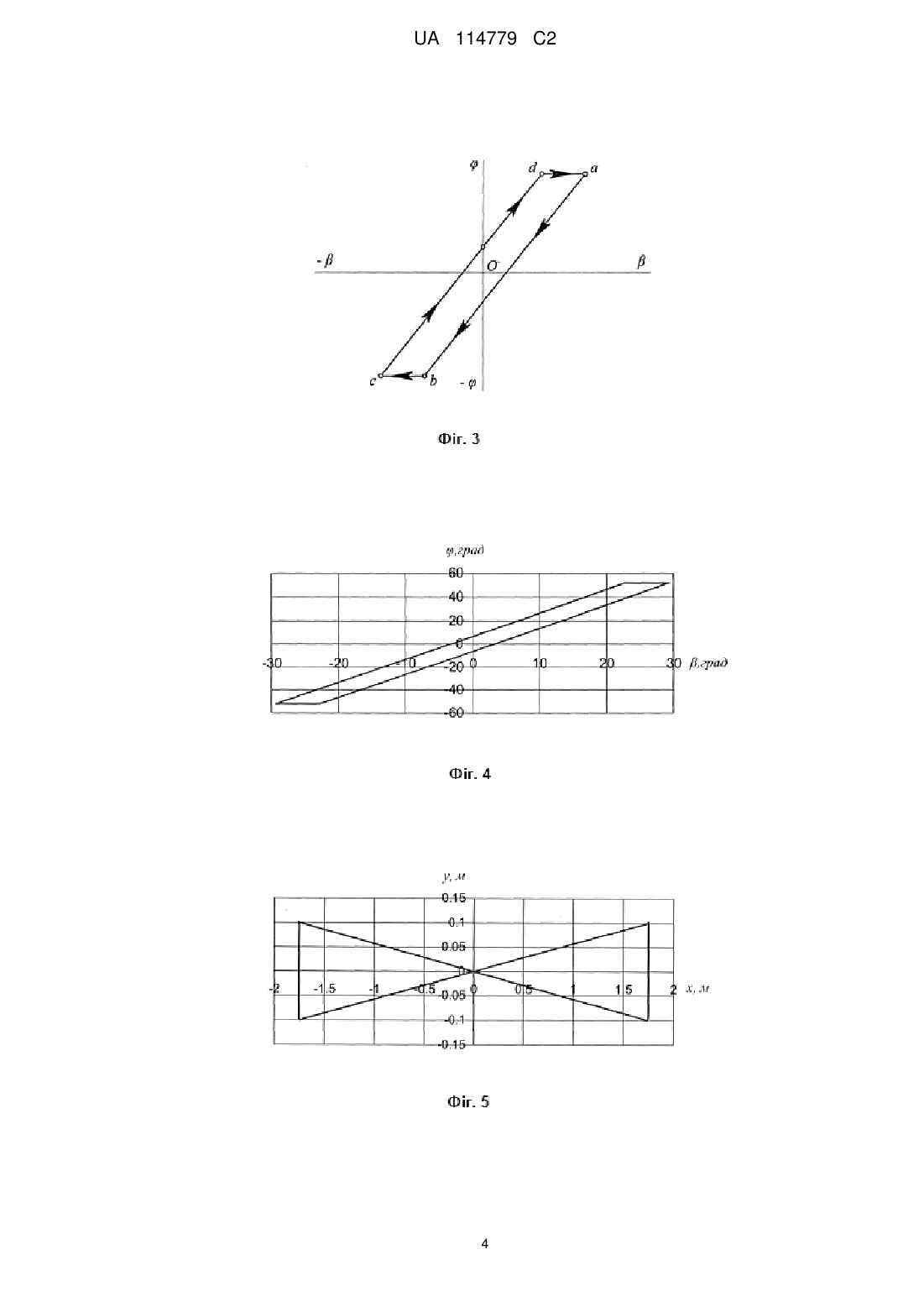
Реферат: Універсальна землерийна машина, що включає проміжну раму, шарнірно з'єднану з тягачем, раму робочого органу, шарнірно з'єднану з протилежним від тягача кінцем проміжної рами, незалежні гідроциліндри з регульованими гідронасосами і систему управління подачами гідронасосів. Проміжна рама і рама робочого органу пов'язані між собою з можливістю перетворення обертового руху проміжної рами під час руху тягача в лінійно-ступінчасту траєкторію ріжучої частини робочого органу, причому лінійні ділянки цієї траєкторії, які утворюються при коливальному переміщенні робочого органу по всій ширині котловану від одного крайнього положення до іншого крайнього положення, а потім у зворотному напрямку, перпендикулярні до поздовжньої осі тягача і паралельні між собою, а віддаль між ними дорівнює заданій товщині стружки ґрунту. Технічний результат: розробка котловану більш рівномірними стружками заданої товщини, покращення умов роботи землерийної машини та підвищення її продуктивності. UA 114779 C2 (12) UA 114779 C2 UA 114779 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до галузі землерийних машин, а саме до універсальних машин з роторним робочим органом для копання траншей та котлованів різної ширини одним і тим же робочим органом. З опису до SU 966168 А, 15.10.1982 відома універсальна землерийна машина, що включає проміжну раму, яка змонтована на тягачі першим своїм кінцем, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, та гідронасос приводу силових гідроциліндрів коливання робочого органа відносно проміжної рами в горизонтальній площині. Недолік даної машини - нерівномірність товщини стружки ґрунту, що зрізується робочим органом по ширині котловану за кожен цикл коливання. З опису до SU 1137157 А, 30.01.1985 відома універсальна землерийна машина, що включає проміжну раму, яка шарнірно змонтована на тягачі першим своїм кінцем, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, перший гідронасос приводу силових гідроциліндрів коливання в горизонтальній площині проміжної рами відносно тягача та другий гідронасос приводу силових гідроциліндрів коливання в горизонтальній площині робочого органа відносно проміжної рами. Співвідношення параметрів приводів коливання підібрано таким чином, що в кінці кожного циклу коливання забезпечується випереджувальна подача робочого органа на забій. Недолік даної машини - неможливість управління приводами для коливання проміжної рами та коливання робочого органа. Внаслідок цього співвідношення параметрів приводів коливання проміжної рами та коливання і робочого органа для забезпечення розробки котловану рівномірними стружками підібрати складно, а, по-друге, це можливо зробити тільки для однієї строго фіксованої швидкості руху тягача. Найближчим аналогом винаходу, що заявляється, є відома з опису до UA 101931 С2, 13.05.2013 універсальна землерийна машина, що включає проміжну раму, шарнірно з'єднану з тягачем, раму робочого органу, шарнірно з'єднану з протилежним від тягача кінцем проміжної рами, незалежні гідроциліндри з регульованими гідронасосами і систему управління подачами гідронасосів, пристосовану для того, щоб за час коливального переміщення робочого органу в горизонтальній площині із одного крайнього положення в інше крайнє положення вектор проекції цього коливального переміщення робочого органу на напрямок переміщення тягача був практично рівним за величиною вектора переміщення тягача і протилежним йому за напрямком. Недоліком цієї машини є те, що еліпсоподібна траєкторія ріжучої частини робочого органу не забезпечує розробку котловану рівномірними стружками. Технічна задача винаходу полягає у тому, щоб шляхом модифікації зв'язків між проміжною рамою і рамою робочого органу забезпечити можливість зміни траєкторії ріжучої частини робочого органу таким чином, щоб зробити можливою розробку котловану більш рівномірними стружками різної заданої товщини, при різних швидкостях переміщення тягача та різній ширині розроблюваної виїмки. Поставлена задача вирішена тим, що в універсальній землерийній машині, що включає проміжну раму, шарнірно з'єднану з тягачем, раму робочого органу, шарнірно з'єднану з протилежним від тягача кінцем проміжної рами, незалежні гідроциліндри з регульованими гідронасосами і систему управління подачами гідронасосів, пристосовану для того, щоб за час коливального переміщення робочого органу в горизонтальній площині із одного крайнього положення в інше крайнє положення вектор проекції цього коливального переміщення робочого органу на напрямок переміщення тягача був практично рівним за величиною вектора переміщення тягача і протилежним йому за напрямком, відповідно до винаходу, проміжна рама і рама робочого органу пов'язані між собою з можливістю перетворення обертового руху проміжної рами під час руху тягача в лінійно-ступінчасту траєкторію ріжучої частини робочого органу, причому лінійні ділянки цієї траєкторії, які утворюються при коливальному переміщенні робочого органу по всій ширині котловану від одного крайнього положення до іншого крайнього положення, а потім у зворотному напрямку, перпендикулярні до поздовжньої осі тягача і паралельні між собою, а віддаль між ними дорівнює заданій товщині стружки ґрунту. Сукупність ознак винаходу дозволяє забезпечити розробку котловану більш рівномірними стружками заданої товщини. Це сприяє покращенню умов роботи землерийної машини та підвищенню її продуктивності. Алгоритм взаємодії проміжної рами і рами робочого органу на лінійній ділянці траєкторії може бути описаний рівнянням: S 2 arctg , а на дугоподібній ділянці траєкторії 1 UA 114779 C2 const , де - кут повороту рами робочого органу відносно проміжної рами; - кут повороту проміжної рами відносно поздовжньої осі тягача; S - товщина стружки ґрунту; В - ширина котловану. 5 10 15 20 25 30 Доцільно, коли кутова швидкість d проміжної рами постійна для заданого поєднання dt значень ширини котловану В, товщини стружки ґрунту S і поздовжньої швидкості тягача Vпт. Винахід пояснений кресленнями, на яких: на фіг. 1 показано схему механізму переміщення робочого органу універсальної землерийної машини, на фіг. 2 - траєкторію різання ґрунту з урахуванням переміщення тягача, на фіг. 3 - графічне представлення алгоритму функціонування робочого органу універсальної землерийної машини, на фіг. 4 - розрахункова залежність між кутом повороту ω рами робочого органу та кутом повороту проміжної рами, на фіг. 5 - розрахункова залежність між поздовжнім у та поперечним х переміщеннями точки R робочого органу для нерухомого тягача, на фіг. 6 - розрахункова залежність між поздовжнім у та поперечним х переміщеннями точки R робочого органу для рухомого тягача. Універсальна землерийна машина включає проміжну раму 1, шарнірно з'єднану з тягачем 6, раму 2 робочого органу, шарнірно з'єднану з протилежним від тягача 6 кінцем проміжної рами 1, незалежні гідроциліндри 3,4 з регульованими гідронасосами і систему управління подачами гідронасосів. За час коливального переміщення робочого органу (ріжучої частини, показано як точка R) в горизонтальній площині із одного крайнього положення в інше крайнє положення вектор проекції цього коливального переміщення робочого органу на напрямок переміщення тягача 6 є практично рівним за величиною вектора переміщення тягача 6 і протилежним йому за напрямком. Проміжна рама 1 і рама 2 робочого органу пов'язані між собою з можливістю перетворення обертового руху проміжної рами 1 під час руху тягача 6 в лінійно-ступінчасту траєкторію ріжучої частини (показано як точка R) робочого органу. Лінійні ділянки цієї траєкторії, які утворюються при коливальному переміщенні робочого органу по всій ширині котловану від одного крайнього положення до іншого крайнього положення, а потім у зворотному напрямку, перпендикулярні до поздовжньої осі тягача і паралельні між собою, а віддаль між ними дорівнює заданій товщині стружки ґрунту, що сприяє розробці котловану більш рівномірними стружками заданої товщини. Це сприяє покращенню умов роботи землерийної машини та підвищенню її продуктивності, як це доведено графіками та розрахунками (див. фіг.2-6). ФОРМУЛА ВИНАХОДУ 35 40 45 50 1. Універсальна землерийна машина, що включає проміжну раму, шарнірно з'єднану з тягачем, раму робочого органу, шарнірно з'єднану з протилежним від тягача кінцем проміжної рами, незалежні гідроциліндри з регульованими гідронасосами і систему управління подачами гідронасосів, пристосовану для того, щоб за час коливального переміщення робочого органу в горизонтальній площині із одного крайнього положення в інше крайнє положення вектор проекції цього коливального переміщення робочого органу на напрямок переміщення тягача був практично рівним за величиною вектора переміщення тягача і протилежним йому за напрямком, яка відрізняється тим, що проміжна рама і рама робочого органу пов'язані між собою з можливістю перетворення обертового руху проміжноїрами під час руху тягача в лінійноступінчасту траєкторію ріжучої частини робочого органу (точки R), причому лінійні ділянки цієї траєкторії, які утворюються при коливальному переміщенні робочого органу по всій ширині котловану від одного крайнього положення до іншого крайнього положення, а потім у зворотному напрямку, перпендикулярні до поздовжньої осі тягача і паралельні між собою, а віддаль між ними дорівнює заданій товщині стружки ґрунту. 2. Машина за п. 1, яка відрізняється тим, що алгоритм взаємодії проміжної рами і рами робочого органу на лінійній ділянці траєкторії описується рівнянням S 2 arctg , а на дугоподібній ділянці траєкторії const , де - кут повороту рами робочого органу відносно проміжної рами; - кут повороту проміжної рами відносно поздовжньої осі тягача; S - товщина стружки ґрунту; В - ширина котловану. 55 2 UA 114779 C2 d проміжної рами dt постійна для заданого поєднання значень ширини котловану В, товщини стружки ґрунту S і поздовжньої швидкості тягача Vпт. 3. Машина за п. 1 або 2, яка відрізняється тим, що кутова швидкість 3 UA 114779 C2 4 UA 114779 C2 Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E02F 3/26, E02F 3/18, E02F 3/00, E02F 5/18
Мітки: машина, землерийна, універсальна
Код посилання
<a href="https://ua.patents.su/7-114779-universalna-zemlerijjna-mashina.html" target="_blank" rel="follow" title="База патентів України">Універсальна землерийна машина</a>
Універсальна землерийна машина

Номер патенту: 101931
Опубліковано: 13.05.2013
Автори: Кузьмінець Микола Петрович, Мусійко Володимир Данилович, Дмитриченко Микола Федорович, Лейченко Юрій Борисович, Коваль Андрій Борисович, Білякович Микола Олексійович
МПК: E02F 3/00, E02F 3/26, E02F 5/18, E02F 3/18
Мітки: універсальна, землерийна, машина
Формула / Реферат:
1. Універсальна землерийна машина, що містить проміжну раму, яка першим своїм кінцем шарнірно змонтована на тягачі, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, перший гідропривід коливання в горизонтальній площині проміжної рами відносно тягача, який містить перший гідронасос, другий гідропривід коливання в горизонтальній площині робочого органа відносно проміжної рами, який включає в себе другий...
Землерийна машина

Номер патенту: 34716
Опубліковано: 26.08.2008
Автори: Мазуренко Петро Григорович, Дінул Валерій Германович, Огороднік Богдан Миколайович, Юрчук Володимир Петрович
МПК: E02F 9/22
Мітки: машина, землерийна
Формула / Реферат:
Землерийна машина, що містить робочий орган, який містить раму з ланцюгами, на яких установлені балки з різцями та механізм заглиблення та підйому робочого органа для регулювання кута нахилу рами до горизонту, яка відрізняється тим, що відстань між боковими ланцюгами дорівнює 190÷210 мм і забезпечує ширину траншеї не більше 350 мм, причому кут нахилу рами до горизонту відповідає значенню 55÷60, що забезпечує глибину траншеї не...
Ручна землерийна машина

Номер патенту: 24240
Опубліковано: 25.06.2007
Автори: Кроль Роман Миколайович, Соколов Ігор Анатолійович, Хмара Леонід Андрійович, Голубченко Олександр Іванович
МПК: E02F 3/76
Мітки: землерийна, машина, ручна
Формула / Реферат:
Ручна землерийна машина, що містить базову раму з привідними колесами і двигуном та рукоять керування, яка відрізняється тим, що вона додатково обладнана відвалом, перед яким в опорах встановлено шнековий робочий орган з ланцюговою передачею та електродвигуном, при цьому відвал шарнірно з'єднаний з базовою рамою за допомогою паралелограмної підвіски з електроштовхачем.
Землерийна машина

Номер патенту: 99047
Опубліковано: 10.07.2012
Автори: Романовський Олександр Леонтійович, Васильчук Олександр Юрійович, Кравець Святослав Володимирович, Макарчук Олександр Володимирович, Процик Дмитро Іванович
МПК: E02F 5/30, A01B 13/08
Мітки: землерийна, машина
Формула / Реферат:
Землерийна машина з тягачем, паралелограмною навіскою і шарнірно навішеним робочим органом, який включає несучий стояк у вигляді розрізного ножа з різальною кромкою та вухами і ґрунторозробний орган, до розрізного ножа закріплений за допомогою гнучкої тяги ґрунторозробний орган у вигляді дренера і самооборотний розпушувач, який відрізняється тим, що верхнє вухо стояка виконане з криволінійним пазом, з постійним радіусом кривизни r...
Землерийна машина

Номер патенту: 1859
Опубліковано: 20.12.1994
Автори: Рибко Олександр Володимирович, Биков Олександр Володимирович, Сахно Борис Григорович, Коцюба Юрій Гордійович, Глазман Борис Михайлович, Кушнір Юхим Абрамович, Лобода Віталій Андрійович, Молібог Олександр Вікторович, Цибізов Олександр Григорович, Черних Андрій Михайлович, Фурто Геннадій Савич
Мітки: землерийна, машина
Формула / Реферат:
Землеройная машина, включающая тягач, установленную на нем горизонтальными шарнирами промежуточную раму, раму с метателем, связанную с промежуточной рамой вертикальными шарнирами, цепной рабочий орган и опорные лыжи, отличающаяся тем, что, с целью повышения производительности разработки котлованов в мерзлых грунтах при подаче тягача задним ходом, каждая опорная лыжа установлена перед соответствующим движителем и имеет с ним общую...
Наступний патент: Застосування алкілпохідних 3-r-4-r1-1,2,4-триазол-5-тіолів як депримуючих агентів
Випадковий патент: Слюдинітова стрічка та спосіб її одержання