Універсальна землерийна машина
Номер патенту: 101931
Опубліковано: 13.05.2013
Автори: Лейченко Юрій Борисович, Мусійко Володимир Данилович, Білякович Микола Олексійович, Дмитриченко Микола Федорович, Коваль Андрій Борисович, Кузьмінець Микола Петрович

Формула / Реферат
1. Універсальна землерийна машина, що містить проміжну раму, яка першим своїм кінцем шарнірно змонтована на тягачі, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, перший гідропривід коливання в горизонтальній площині проміжної рами відносно тягача, який містить перший гідронасос, другий гідропривід коливання в горизонтальній площині робочого органа відносно проміжної рами, який включає в себе другий гідронасос та систему управління зазначеними гідроприводами, яка відрізняється тим, що перший та другий насоси виконані регульованими, а система управління зазначеними гідроприводами пристосована для автоматичного керування величинами подачі першого та другого насосів залежно від величини переміщення тягача за час коливального переміщення робочого органа (точки ![]() ) із одного крайнього положення (
) із одного крайнього положення (![]() або
або ![]() ) у інше крайнє положення (
) у інше крайнє положення (![]() або
або ![]() ) таким чином, щоб вектор проекції цього коливального переміщення робочого органа на напрямок переміщення тягача
) таким чином, щоб вектор проекції цього коливального переміщення робочого органа на напрямок переміщення тягача ![]() був практично рівним за величиною вектора переміщення тягача
був практично рівним за величиною вектора переміщення тягача ![]() і протилежним йому за напрямком, та/або залежно від величини швидкості переміщення тягача таким чином, щоб вектор проекції швидкості коливального руху робочого органа на напрямок переміщення машини
і протилежним йому за напрямком, та/або залежно від величини швидкості переміщення тягача таким чином, щоб вектор проекції швидкості коливального руху робочого органа на напрямок переміщення машини ![]() був практично рівним за величиною вектора швидкості переміщення тягача
був практично рівним за величиною вектора швидкості переміщення тягача ![]() і протилежним йому за напрямком.
і протилежним йому за напрямком.
2. Машина за п. 1, яка відрізняється тим, що система управління зазначеними першим та другим гідроприводами включає в себе мікропроцесорний блок управління, який через відповідні пристрої зв'язку зв'язаний із елементами регулювання подачею першого та другого насосів, елементами управління силових гідроциліндрів гідроприводів коливання, пультом керування, засобами індикації, датчиком переміщення тягача, а також датчиками кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами та/або датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами та/або засобом для безконтактного вимірювання координат ![]() робочого органа 3 (точки
робочого органа 3 (точки ![]() ), який включає в себе лазерні чи інші дальноміри, що встановлені у віддалених одна від одної на базову відстань
), який включає в себе лазерні чи інші дальноміри, що встановлені у віддалених одна від одної на базову відстань ![]() перпендикулярно поздовжній осі тягача (осі координат
перпендикулярно поздовжній осі тягача (осі координат ![]() ) точках тягача 1 і пристосовані для вимірювання відстаней до встановленого на робочому органі (у точці
) точках тягача 1 і пристосовані для вимірювання відстаней до встановленого на робочому органі (у точці ![]() ) реперного елемента, та електронний блок для розрахунку координат
) реперного елемента, та електронний блок для розрахунку координат ![]() за даними виміряних відстаней
за даними виміряних відстаней ![]() та базової відстані
та базової відстані ![]() .
.
3. Машина за попереднім пунктом, яка відрізняється тим, що мікропроцесорний блок управління зв'язаний із засобом для вимірювання часу.
4. Машина за будь-яким із пп. 2, 3, яка відрізняється тим, що датчики кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами пристосовані для фіксації крайніх та множини проміжних положень проміжної рами та робочого органа.
5. Машина за будь-яким із пп. 2-3, яка відрізняється тим, що датчики кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами виконані у вигляді кінцевих вимикачів, які встановлені так, що спроможні подавати сигнал у положенні проміжної рами та робочого органа вздовж поздовжньої осі тягача (осі координат ![]() ), для якого відповідні кути
), для якого відповідні кути ![]() і
і ![]() дорівнюють нулю, за умови, що мікропроцесорний блок управління зв'язаний із датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами, при цьому мікропроцесорний блок управління пристосований для того, щоб при надходженні сигналу від кінцевих вимикачів обнуляти дані, які отримані від датчиків витрати робочої рідини, та дані стосовно кутів (
дорівнюють нулю, за умови, що мікропроцесорний блок управління зв'язаний із датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами, при цьому мікропроцесорний блок управління пристосований для того, щоб при надходженні сигналу від кінцевих вимикачів обнуляти дані, які отримані від датчиків витрати робочої рідини, та дані стосовно кутів (![]() і
і ![]() ), які отримані методом розрахунку на базі інформаційних сигналів, отриманих від датчиків витрати робочої рідини.
), які отримані методом розрахунку на базі інформаційних сигналів, отриманих від датчиків витрати робочої рідини.
Текст
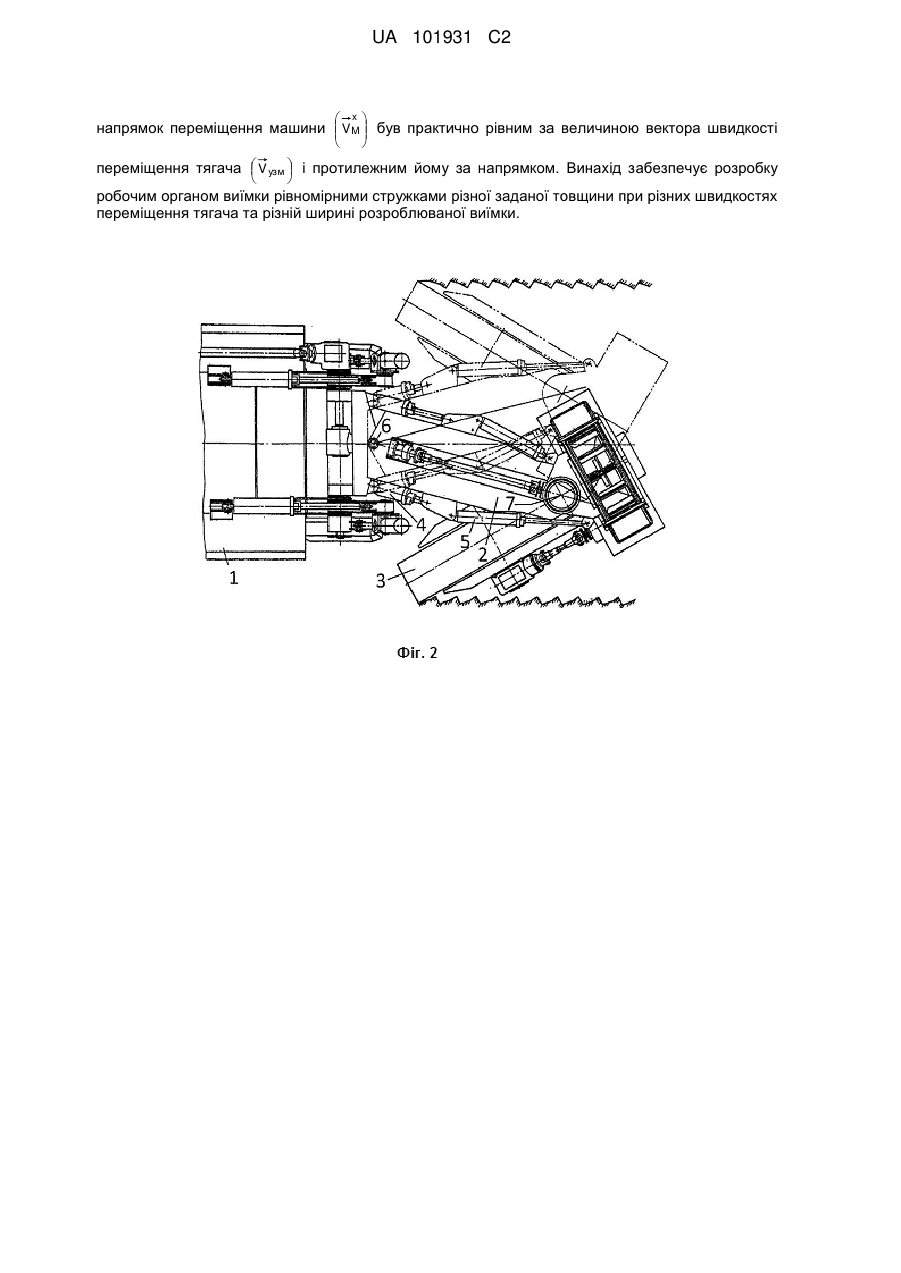
Реферат: Універсальна землерийна машина (УЗМ) містить проміжну раму (2), яка першим своїм кінцем шарнірно змонтована на тягачі (1), робочий орган (3), шарнірно з'єднаний з протилежним від тягача (1) другим кінцем проміжної рами (2), перший гідропривід коливання в горизонтальній площині проміжної рами (2) відносно тягача (1), який включає в себе перший гідронасос (8), другий гідропривід коливання в горизонтальній площині робочого органа (3) відносно проміжної рами (2), який містить другий гідронасос (17), та систему управління зазначеними гідроприводами. Новим є те, що перший (8) та другий (17) насоси виконані регульованими, а система управління зазначеними гідроприводами пристосована для автоматичного керування величинами подачі першого (8) та другого (17) насосів залежно від величини переміщення тягача (1) за час коливального переміщення робочого органа (точки M ) із одного крайнього положення ( M4 або M2 ) у інше крайнє положення ( M1 або M3 ) таким чином, щоб вектор проекції цього коливального переміщення робочого органа (3) на напрямок переміщення тягача x x SM4 M1 , SM2 M3 був практично рівним за величиною вектора переміщення тягача S узм і протилежним йому за напрямком, та/або залежно від величини швидкості переміщення тягача (1) таким чином, щоб вектор проекції швидкості коливального руху робочого органа (3) на UA 101931 C2 (12) UA 101931 C2 x напрямок переміщення машини VM був практично рівним за величиною вектора швидкості переміщення тягача V узм і протилежним йому за напрямком. Винахід забезпечує розробку робочим органом виїмки рівномірними стружками різної заданої товщини при різних швидкостях переміщення тягача та різній ширині розроблюваної виїмки. UA 101931 C2 5 10 15 20 25 30 35 40 Винахід належить до галузі землерийних машин, а саме до універсальних машин з роторним робочим органом для копання траншей та котлованів різної ширини одним і тим же робочим органом. Відома універсальна землерийна машина, що включає проміжну раму, яка змонтована на тягачі першим своїм кінцем, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, та гідронасос приводу силових гідроциліндрів коливання робочого органа відносно проміжної рами в горизонтальній площині [1]. Недолік даної машини - нерівномірність товщини стружки ґрунту, що зрізується робочим органом по ширині котловану за кожен цикл коливання. Відома універсальна землерийна машина, що включає проміжну раму, яка шарнірно змонтована на тягачі першим своїм кінцем, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, перший гідронасос приводу силових гідроциліндрів коливання в горизонтальній площині проміжної рами відносно тягача та другий гідронасос приводу силових гідроциліндрів коливання в горизонтальній площині робочого органа відносно проміжної рами. Співвідношення параметрів приводів коливання підібрано таким чином, що в кінці кожного циклу коливання забезпечується випереджувальна подача робочого органа на забій [2]. Недолік даної машини - неможливість управління приводами для коливання проміжної рами та коливання робочого органа. Внаслідок цього співвідношення параметрів приводів коливання проміжної рами та коливання робочого органа для забезпечення розробки котловану рівномірними стружками підібрати складно, а, по-друге, це можливо зробити тільки для однієї строго фіксованої швидкості руху тягача. Технічна задача винаходу полягає у тому, щоб шляхом забезпечення адаптивного керування швидкістю коливання проміжної рами та швидкістю коливання робочого органа із врахуванням величини переміщення тягача за один півцикл коливання або швидкості переміщення тягача, по-перше, спростити підбір співвідношення параметрів приводів коливання проміжної рами та коливання робочого органа а, по-друге, зробити можливою розробку котловану більш рівномірними стружками різної заданої товщини, при різних швидкостях переміщення тягача та різній ширині розроблюваної виїмки. Поставлена задача вирішена тим, що в універсальній землерийній машині, що включає проміжну раму, яка першим своїм кінцем шарнірно змонтована на тягачі, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, перший гідропривід коливання в горизонтальній площині проміжної рами відносно тягача, який включає в себе перший гідронасос, другий гідропривід коливання в горизонтальній площині робочого органа відносно проміжної рами, який включає в себе другий гідронасос, та систему управління зазначеними гідроприводами, згідно з винаходом, перший та другий насоси виконані регульованими, а система управління зазначеними гідроприводами пристосована для автоматичного керування величинами подачі першого та другого насосів залежно від величини переміщення тягача за час коливального переміщення робочого органа (точки М) із одного крайнього положення (М4 або М2) у інше крайнє положення (М1 або М3, фіг. 3) таким чином, щоб вектор проекції цього коливального переміщення робочого органа на напрямок переміщення x x S узм SM4 M1 , SM2 M3 і був практично рівним величині вектора переміщення тягача тягача протилежним йому за напрямком, та/або залежно від величини швидкості переміщення тягача вектор проекції швидкості коливального руху робочого органа на напрямок переміщення 45 x VM машини був практично рівним за величиною вектора швидкості переміщення тягача V узм і протилежним йому за напрямком. 50 55 Завдяки цьому можливо шляхом керування швидкістю коливання проміжної рами та швидкістю коливання робочого органа відповідно до величини переміщення тягача за один півцикл коливання та/або швидкості переміщення тягача забезпечувати необхідну траєкторію переміщення робочого органа при різних швидкостях переміщення тягача та різній ширині розроблюваної виїмки таким чином, щоб забезпечити розробку котловану більш рівномірними стружками різної заданої товщини. Це дозволить покращити умови роботи землерийної машини та підвищити її продуктивність. У окремих випадках виконання система управління зазначеними першим та другим гідроприводами включає в себе мікропроцесорний блок управління, який через відповідні пристрої зв'язку зв'язаний із елементами регулювання подачею першого та другого насосів, 1 UA 101931 C2 5 10 15 20 25 30 35 40 45 50 55 елементами управління силових гідроциліндрів гідроприводів коливання, пультом керування, засобами індикації, датчиком переміщення тягача, а також датчиками кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами та/або датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами та/або засобом для безконтактного вимірювання координат (хро, уро) робочого органа 3 (точки М), який включає в себе лазерні чи інші дальноміри, що встановлені у віддалених одна від одної на базову відстань (Lb) перпендикулярно поздовжній осі тягача (осі координат OY) точках тягача 1 і пристосовані для вимірювання відстаней до встановленого на робочому органі (у точці М) реперного елемента, та електронний блок для розрахунку координат (хро, уро) за даними виміряних відстаней (LM1, LM2) та базової відстані (Lb). Крім того, мікропроцесорний блок управління зв'язаний із засобом для вимірювання часу. Крім того, датчики кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами пристосовані для фіксації крайніх та множини проміжних положень проміжної рами та робочого органа. Крім того, датчики кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами виконані у вигляді кінцевих вимикачів, які встановлені так, що спроможні подавати сигнал у положенні проміжної рами та робочого органа вздовж поздовжньої осі тягача (осі координат OY), для якого відповідні кути і дорівнюють нулю, за умови, що мікропроцесорний блок управління зв'язаний із датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами, при цьому мікропроцесорний блок управління пристосований для того, щоб при надходженні сигналу від кінцевих вимикачів обнуляти дані, які отримані від датчиків витрати робочої рідини та дані стосовно кутів ( і ), які отримані методом розрахунку на базі інформаційних сигналів, отриманих від датчиків витрати робочої рідини. Винахід пояснений кресленнями, на яких: на фіг. 1 показаний загальний вид універсальної землерийної машини; на фіг. 2 - те ж, вид зверху; на фіг. 3 - кінематична схема механізму коливання робочого органа; на фіг. 4 - принципова гідросхема приводів силових гідроциліндрів коливання; на фіг. 5 - блок-схема системи управління гідроприводами коливання проміжної рами та робочого органа. Універсальна землерийна машина включає в себе тягач 1, проміжну раму 2, робочий орган 3, перший гідропривід коливання в горизонтальній площині проміжної рами 2 відносно тягача 1, який включає в себе силові гідроциліндри 4, та другий гідропривід коливання в горизонтальній площині робочого органа 3 відносно проміжної рами 2, який включає в себе силові циліндри 5. Проміжна рама 2 першим своїм кінцем з'єднана з тягачем 1 за допомогою вертикального шарніра 6, а робочий орган 3 з'єднаний з протилежним від тягача другим кінцем проміжної рами 2 за допомогою вертикального шарніра 7. Перший гідропривід коливання в горизонтальній площині проміжної рами 2 відносно тягача 1, крім зазначених вище силових гідроциліндрів 4, включає в себе також перший регульований насос (насос змінної продуктивності) 8, вихід якого через зворотний клапан 9 підключений до напірної магістралі 10, а вхід до бака 11. Спарені гідроциліндри 4 через трипозиційний двоходовий електрогідравлічний розподільник 12 підключені до напірної магістралі 10 та до зливної магістралі 13, у яку включений фільтр 14. Для захисту системи від перевантажень встановлено переливний клапан 15. При відсутності сигналів керування на гідророзподільник 12, розвантаження гідросистеми здійснюється за рахунок двопозиційного триходового електрогідравлічного гідророзподільника 16, який електрично зв'язаний із гідророзподільником 12. Другий гідропривід коливання в горизонтальній площині робочого органа 3 відносно проміжної рами 2 виконаний аналогічно першому гідроприводу і крім зазначених вище силових гідроциліндрів 5 включає в себе також другий регульований насос (насос змінної подачі) 17, зворотний клапан 18, напірну магістраль 19, трипозиційний двоходовий електрогідравлічний розподільник 20, зливну магістраль 21, у яку включений фільтр 22, переливний клапан 23 та двопозиційний триходовий електрогідравлічний гідророзподільник 24. Система управління зазначеними першим та другим гідроприводами у першому варіанті пристосована для керування величинами подачі першого 8 та другого 17 насосів залежно від величини переміщення тягача 1 (Syзм) за час (tпц) півцикла коливального переміщення робочого органа 3 із одного крайнього положення (М4 або М2) у інше крайнє положення (М1 або М3) таким чином, щоб вектор проекції цього коливального переміщення робочого органа 3 (точки М) на x x SM4 M1 , SM2 M3 був практично напрямок переміщення тягача, тобто вздовж осі х на фіг. 3, 2 UA 101931 C2 S узм і протилежним йому за напрямком, рівним за величиною вектора переміщення тягача x 5 x тобто SM4 M1 Sузм , SM2 M3 Sузм . У другому варіанті система управління зазначеними гідроприводами пристосована для керування величинами подачі першого 8 та другого 17 насосів залежно від величини швидкості переміщення тягача 1 (Vyзм) таким чином, щоб вектор проекції швидкості коливального руху x VM робочого органа 3 (точки М) на напрямок переміщення машини, тобто вісь х на фіг. 3, був V узм і протилежним йому практично рівним величині вектору швидкості переміщення тягача 1 x 10 15 20 25 30 35 40 45 50 за напрямком, тобто VM V узм . Система управління зазначеними першим та другим гідроприводами включає в себе мікропроцесорний блок управління 25, який через відповідні пристрої зв'язку зв'язаний із елементами регулювання подачею 26 першого 8 та другого 17 насосів, елементами управління (електрогідравлічними розподільниками 12, 20) силових гідроциліндрів 4, 5 першого та другого гідроприводів коливання, пультом керування 27, засобами індикації 28, датчиком переміщення тягача 29, та датчиками 30, 31 кута повороту проміжної рами 2 відносно тягача 1 () та кута повороту робочого органа 3 відносно проміжної рами 2 (), які пристосовані щонайменше для фіксації крайніх положень проміжної рами 2 та робочого органа 3. Датчики 30, 31 кута повороту проміжної рами 2 відносно тягача 1 () та кута повороту робочого органа 3 відносно проміжної рами 2 () у найпростішому варіанті можуть бути виконані у вигляді кінцевих вимикачів, які встановлені так, що спроможні подавати сигнал у положеннях відповідних елементів, які відповідають крайнім положенням М1-М4 та проміжному положенню М0 траєкторії руху точки М, яка показана на фіг. 3. Краще, коли датчики 30, 31 кута повороту проміжної рами 2 відносно тягача 1 () та кута повороту робочого органа 3 відносно проміжної рами 2 () пристосовані для фіксації додаткової множини проміжних положень проміжної рами 2 та робочого органа 3, які відповідають множині проміжних положень М 5…n точки М. У такому випадку датчики 30, 31 можуть бути виконані у вигляді множини кінцевих вимикачів, а краще у вигляді датчиків, які пристосовані для безступінчастого вимірювання відповідних кутів (, ). Додатково мікропроцесорний блок управління 25 може бути зв'язаний із засобом для вимірювання часу 32 та датчиками витрати робочої рідини 33, 34, які встановлені у гідролініях між електрогідравлічними розподільниками 12, 20 та силовими гідроциліндрами 4, 5. У певних виконаннях може бути корисним, якщо блок управління 25 додатково зв'язаний із засобом 35 для безконтактного вимірювання координат (xро, yро) точки М робочого органа 3, який включає лазерні чи інші дальноміри, що встановлені у віддалених одна від одної вздовж осі OY (на базову відстань Lb) точках тягача 1 і пристосовані для вимірювання відстані до встановленого на робочому органі у точці М реперного елемента, та електронний блок для розрахунку координат хро, уро за даними стосовно виміряних відстаней (LMa, LMb) та базової відстані (Lb). Землерийна машина працює наступним чином. За допомогою пульта 27 до мікропроцесорного блока управління 25 до початку риття котловану вводять задану ширину В котловану та бажане переміщення тягача 1 (Syзм) за час (tпц) півцикла коливального переміщення робочого органа 3 із одного крайнього положення (М4 або М2) у інше крайнє положення (М1 або М3), а також за потреби геометричні параметри (довжини відрізків L6-7 та L7-M на фіг. 3) механізму коливання робочого органа. На фіг. 3 показаний варіант механізму коливання робочого органа 3, за яким довжини відрізків L6-7 та L7-M однакові. Риття котловану починається з того, що проміжну раму 2 та робочий орган 3 (опущений трохи вище рівня денної поверхні ґрунту) встановлюють по поздовжній осі машини OY (при ==0), запускають перший та другий гідроприводи коливання робочого органа та поступово заглиблюють робочий орган 3 у ґрунт на потрібну глибину при коливанні робочого органа 3, яке здійснюється так, як це описано далі при переміщенні тягача 1 за винятком того, що спочатку проміжна рама 2 та робочий орган 3 повертаються навколо осей відповідних шарнірів 6, 7 таким чином, що умовна розрахункова точка М робочого органа рухається на ділянці траєкторії М 0-М1, при цьому гідроприводи коливання функціонують подібно до того, як це описано для ділянки траєкторії М4-М1. Випереджувальний поворот робочого органа 3 до його повного заглиблення і утворення виїмки по усій ширині котловану не виконується, тобто ділянки траєкторії М 1-М2 та 3 UA 101931 C2 М3-М4 мають практично нульову довжину (кут дорівнює нулю). Крім того, мікропроцесорний блок управління 25 розраховує величини подач Q1, Q2 насосів 8, 17 та подає необхідні сигнали на елементи регулювання подачі 26 першого 8 та другого 17 насосів таким чином, щоб вектор проекції коливального переміщення точки М робочого органа 3 на вісь координат ОХ (напрямок 5 10 15 20 25 x SM0 M1 був рівним нулю (траєкторія переміщення точки М переміщення тягача) на фіг. 3 робочого органу 3 має вигляд практично прямої лінії, яка перпендикулярна осі координат OY (поздовжній осі машини)). Після заглиблення робочого органа у ґрунт на потрібну глибину з утворенням виїмки по усій ширині котловану починають переміщення тягача з швидкістю, яка відповідає введеному раніше бажаному переміщенню тягача 1 (Syзм) за час (tпц) півцикла коливального переміщення робочого органа 3, яке здійснюється у автоматичному режимі таким чином. Одночасне ввімкнення в роботу гідроциліндрів 4, 5 гідроприводів коливання здійснюється за допомогою гідророзподільників 12 та 20 шляхом подачі електричних сигналів на електромагніти Y1 та Y3 (див. фіг. 4). Робоча рідина надходить в поршневі порожнини (зображених зліва на фіг. 4) гідроциліндрів 4, 5 та штокові порожнини (зображених справа на фіг. 4) гідроциліндрів 4, 5 і проміжна рама 2 та робочий орган 3 повертаються навколо осей відповідних шарнірів 6, 7 таким чином, що умовна розрахункова точка М робочого органа рухається, наприклад на ділянці траєкторії М4-М1. При цьому мікропроцесорний блок управління 25 на базі геометричних параметрів (довжин відрізків L6-7 та L7-M на фіг. 3) механізму коливання робочого органа та величини заданої ширини В котловану, які попередньо введені за допомогою пульта 27, а також на базі бажаного переміщення тягача 1 (Syзм) за час (tпц) півциклу коливального переміщення робочого органа 3 або відповідного фактичного переміщення, якщо воно виміряне (не дорівнює нулю) датчиком переміщення тягача 29 для попереднього півцикла, наприклад для півцикла ділянки траєкторії М2-М3, розраховує величини подач Q1, Q2 насосів 8, 17 та подає необхідні сигнали на елементи регулювання подачі 26 першого 8 та другого 17 насосів таким чином, щоб вектор проекції коливального переміщення точки М робочого органа 3 на вісь координат ОХ x SM4 M1 був практично рівним за величиною вектора (напрямок переміщення тягача) на фіг. 3 S узм і протилежним йому за напрямком, тобто бажаного/фактичного переміщення тягача x SM4 M1 Sузм . Таким чином кут нахилу траєкторією М -М до осі координат ОХ відповідає 4 1 30 35 40 45 50 бажаному/фактичному переміщенню тягача та заданій ширині В котловану. Після початку руху тягача 1 в точці М4 починається відлік фактичного переміщення тягача (Syзм) за сигналом датчика переміщення тягача 29. При досягненні точкою М крайнього правого положення М1, відповідного координаті цієї точки х=В/2, електричний сигнал з електромагніта Y3 знімається, припиняється подача рідини в гідроциліндри 5. Момент досягнення крайнього положення М1 визначається за сигналами датчиків 30, 31 кута повороту проміжної рами 2 відносно тягача 1 () та кута повороту робочого органа 3 відносно проміжної рами 2 (). В точці М1 завершується відлік фактичного переміщення тягача (Syзм) за сигналом датчика переміщення тягача 29, який зберігається у пам'яті і використовується мікропроцесорним блоком управління 25 для наступного півцикла коливання (на ділянці М2-М3). Крім того, мікропроцесорним блоком управління 25 може порівнювати виміряне фактичне переміщення тягача (Syзм) із бажаним переміщенням, яке введене до пам'яті цього блока до початку риття котловану, і у разі неспівпадіння цих переміщень мікропроцесорний блок управління 25 може формувати сигнал для відповідного коригування швидкості переміщення тягача 1 (Vyзм). Таким чином швидкість тягача (Vyзм) може коригуватись після кожного півцикла коливання робочого органа 3. За рахунок продовження повороту проміжної рами 2 протягом деякого часу t3, точка М описує дугу радіусом В/2 відносно точки О (вісі шарніру 6). Таким чином виконується випереджувальний поворот робочого органа 3 на ділянці траєкторії М1-М2 на потрібний кут 2. Точка М2 - початок відліку часу півцикла, який проходить до моменту досягнення точкою М точки М3 (див. фіг. 3). Момент досягнення крайнього положення М2 визначається за сигналами датчиків 30, 31. В точці М2 починається новий відлік фактичного переміщення тягача (Syзм) за сигналом датчика переміщення тягача 29. В точці М2 напруга подається на електромагніти Y2, Y4 та знімається з електромагніта Y1. При цьому робоча рідина подається гідророзподільниками 12 та 20 в поршневі порожнини 4 UA 101931 C2 5 10 гідроциліндрів 4, 5. Проміжна рама 2 та робочий орган 3 виконують рух, який забезпечує переміщення точки М на ділянці М2-М3 потрібної траєкторії руху робочого органа 3. При цьому мікропроцесорний блок управління 25 на базі геометричних параметрів (довжин відрізків L6-7 та L7-M на фіг. 3) механізму коливання робочого органа та величини заданої ширини В котловану, які попередньо введені за допомогою пульта 27, а також з урахуванням величини фактичного переміщення, яке виміряне датчиком переміщення тягача 29 для попереднього півцикла ділянки траєкторії М4-М1, розраховує величини подач Q1, Q2 насосів 8, 17 та подає необхідні сигнали на елементи регулювання подачі 26 першого 8 та другого 17 насосів таким чином, щоб вектор проекції коливального переміщення точки М робочого органа 3 на вісь координат ОХ (напрямок переміщення тягача) на фіг. 3 фактичного переміщення тягача x SM2 M3 S узм був практично рівним за величиною вектора і протилежним йому за напрямком, тобто x SM2 M3 15 20 25 30 35 Sузм . В точці М3 завершується відлік фактичного переміщення тягача (Syзм) за сигналом датчика переміщення тягача 29. Нове значення фактичного переміщення тягача (Syзм) замінює у пам'яті мікропроцесорного блока управління 25 відповідне попереднє значення і використовується цим блоком для наступного півцикла коливання (на ділянці М4-М1) при розрахунку величин подач Q1, Q2 насосів 8, 17 і формуванні сигналів для регулювання подачі 26 першого 8 та другого 17 насосів у процесі переміщення точки М робочого органа на ділянці М4-М1 її траєкторії. На ділянках М3-М4 та М4-М1 траєкторії руху точки М робочого органа керування роботою гідроциліндрів 4, 5 гідроприводів коливання здійснюється за допомогою гідророзподільників 12 та 20 аналогічно до того, як це описано для ділянок М1-М2 та М2-М3. Описаний вище процес управління машиною кращий тим, що система управління зазначеними гідроприводами має більш просте виконання, однак, при цьому неможливо повністю відкоригувати усі варіації швидкості переміщення тягача внаслідок певного запізнювання формування блоком управління 25 коригуючих сигналів внаслідок чого можлива певна нерівномірність товщини стружки. При другому варіанті виконання системи управління зазначеними гідроприводами коливання можливе формування коригуючих сигналів без будь-якого запізнювання безпосередньо в момент зміни швидкості тягача. Цей варіант функціонування системи управління відрізняється тим, що замість бажаного/фактичного переміщення тягача 1 (Syзм) за час (tпц) півцикла коливального переміщення робочого органа використовуються бажана/фактична швидкість переміщення тягача 1 (Vyзм). При цьому фактична швидкість переміщення тягача 1 (Vyзм) постійно розраховується мікропроцесорним блоком управління 25 за даними датчика переміщення тягача 29 та засобу для вимірювання часу 32 для достатньо малих заданих інтервалів часу, наприклад однієї секунди. Мікропроцесорний блок управління 25 постійно розраховує величини подач Q1, Q2 насосів 8, 17 та подає необхідні сигнали на елементи регулювання подачі 26 першого 8 та другого 17 насосів таким чином, щоб у кожному заданому інтервалі часу вектор проекції швидкості коливального руху робочого органу 3 (точки x VM М) на напрямок переміщення машини, тобто вісь OY на фіг. 3, був практично рівним за 40 V узм і протилежним йому за напрямком, величиною вектору швидкості переміщення тягача 1 x 45 50 тобто VM V узм . Крім того, мікропроцесорний блок управління 25 може постійно порівнювати виміряну фактичну швидкість тягача (Vузм) із бажаною швидкістю, яка введена до пам'яті цього блока до початку риття котловану, і у разі неспівпадіння цих швидкостей мікропроцесорний блок управління 25 може формувати сигнал для відповідного коригування фактичної швидкості переміщення тягача 1. Таким чином швидкість тягача (Vyзм) може коригуватись у кожному заданому інтервалі часу. З погляду забезпечення найбільшої рівномірності товщини стружки найкращим є варіант, за яким поєднані перші два варіанти і система управління зазначеними першим та другим гідроприводами пристосована для керування величинами подачі першого 8 та другого 17 насосів залежно від величини переміщення тягача 1 (Syзм) за час (tпц) півцикла коливального переміщення робочого органа 3 таким чином, щоб вектор проекції цього коливального 5 UA 101931 C2 x x SM4 M1 , SM2 M3 переміщення робочого органа 3 (точки М) на напрямок переміщення тягача S узм і протилежним йому за був практично рівним за величиною вектора переміщення тягача x x напрямком ( SM4 M1 Sузм , SM2 M3 Sузм ), а також залежно від величини швидкості переміщення тягача 1 (Vузм) таким чином, щоб вектор проекції швидкості коливального руху 5 x VM робочого органа 3 (точки М) на напрямок переміщення машини був практично рівним за V узм і протилежним йому за напрямком, величиною вектора швидкості переміщення тягача 1 x 10 15 20 25 30 тобто VM V узм . За допомогою інформаційних сигналів, отриманих від датчиків витрати робочої рідини 33, 34, мікропроцесорний блок управління 25 може більш точно контролювати та керувати подачею першого 8 та другого 17 насосів. На базі обробки інформаційних сигналів, отриманих від датчиків витрати робочої рідини 33, 34, мікропроцесорний блок управління 25 може розрахувати кут повороту проміжної рами 2 відносно тягача 1 () та кут повороту робочого органа 3 відносно проміжної рами 2 () без використання відповідних датчиків 30, 31. Однак, кращим є варіант коли датчики 30, 31 виконані у вигляді кінцевих вимикачів, які встановлені так, що спроможні подавати сигнал у положенні проміжної рами та робочого органа, яке відповідає проміжному положенню М0 траєкторії руху точки М, для якого відповідні кути і дорівнюють нулю. При надходженні цього сигналу мікропроцесорний блок управління 25 може обнуляти дані, які отримані від датчиків витрати робочої рідини 33, 34, та дані стосовно кутів і , які отримані методом розрахунку на базі інформаційних сигналів, отриманих від датчиків витрати робочої рідини 33, 34, і таким чином робити неможливим накопичення похибок з плином часу. Додатково використовуючи інформаційний сигнал, отриманий від засобу для вимірювання часу 32, мікропроцесорний блок управління 25 може розрахувати траєкторію точки М робочого органа 3 та величини проекції коливального переміщення та проекції швидкості точки М на напрямок переміщення тягача. Альтернативно або додатково до описаних вище методів мікропроцесорний блок управління 25 може розраховувати траєкторію руху точки М робочого органа 3, величини проекції коливального переміщення та проекції швидкості точки М на напрямок переміщення тягача використовуючи інформаційний сигнал, отриманий від засобу 35 для безконтактного вимірювання координат (хро, уро) точки М робочого органа 3. Використання винаходу забезпечує розробку робочим органом виїмки рівномірними стружками різної заданої товщини при різних швидкостях переміщення тягача та різній ширині розроблюваної виїмки. ФОРМУЛА ВИНАХОДУ 35 40 45 1. Універсальна землерийна машина, що містить проміжну раму, яка першим своїм кінцем шарнірно змонтована на тягачі, робочий орган, шарнірно з'єднаний з протилежним від тягача другим кінцем проміжної рами, перший гідропривід коливання в горизонтальній площині проміжної рами відносно тягача, який містить перший гідронасос, другий гідропривід коливання в горизонтальній площині робочого органа відносно проміжної рами, який включає в себе другий гідронасос та систему управління зазначеними гідроприводами, яка відрізняється тим, що перший та другий насоси виконані регульованими, а система управління зазначеними гідроприводами пристосована для автоматичного керування величинами подачі першого та другого насосів залежно від величини переміщення тягача за час коливального переміщення робочого органа (точки M ) із одного крайнього положення ( M4 або M2 ) у інше крайнє положення ( M1 або M3 ) таким чином, щоб вектор проекції цього коливального переміщення x x робочого органа на напрямок переміщення тягача SM4 M1 , SM2 M3 був практично рівним за величиною вектора переміщення тягача S узм і протилежним йому за напрямком, та/або залежно від величини швидкості переміщення тягача таким чином, щоб вектор проекції 6 UA 101931 C2 x швидкості коливального руху робочого органа на напрямок переміщення машини VM був практично рівним за величиною вектора швидкості переміщення тягача V узм і протилежним 5 10 15 20 25 30 йому за напрямком. 2. Машина за п. 1, яка відрізняється тим, що система управління зазначеними першим та другим гідроприводами включає в себе мікропроцесорний блок управління, який через відповідні пристрої зв'язку зв'язаний із елементами регулювання подачею першого та другого насосів, елементами управління силових гідроциліндрів гідроприводів коливання, пультом керування, засобами індикації, датчиком переміщення тягача, а також датчиками кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами та/або датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами та/або засобом для безконтактного вимірювання координат xpo , ypo робочого органа 3 (точки M ), який включає в себе лазерні чи інші дальноміри, що встановлені у віддалених одна від одної на базову відстань Lb перпендикулярно поздовжній осі тягача (осі координат OY ) точках тягача 1 і пристосовані для вимірювання відстаней до встановленого на робочому органі (у точці M ) реперного елемента, та електронний блок для розрахунку координат xpo , ypo за даними виміряних відстаней LMa,LMb та базової відстані Lb . 3. Машина за попереднім пунктом, яка відрізняється тим, що мікропроцесорний блок управління зв'язаний із засобом для вимірювання часу. 4. Машина за будь-яким із пп. 2, 3, яка відрізняється тим, що датчики кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами пристосовані для фіксації крайніх та множини проміжних положень проміжної рами та робочого органа. 5. Машина за будь-яким із пп. 2-3, яка відрізняється тим, що датчики кутів повороту проміжної рами відносно тягача та повороту робочого органа відносно проміжної рами виконані у вигляді кінцевих вимикачів, які встановлені так, що спроможні подавати сигнал у положенні проміжної рами та робочого органа вздовж поздовжньої осі тягача (осі координат OY ), для якого відповідні кути і дорівнюють нулю, за умови, що мікропроцесорний блок управління зв'язаний із датчиками витрати робочої рідини, які встановлені у гідролініях між елементами управління силових гідроциліндрів гідроприводів коливання і цими силовими гідроциліндрами, при цьому мікропроцесорний блок управління пристосований для того, щоб при надходженні сигналу від кінцевих вимикачів обнуляти дані, які отримані від датчиків витрати робочої рідини, та дані стосовно кутів ( і ), які отримані методом розрахунку на базі інформаційних сигналів, отриманих від датчиків витрати робочої рідини. 7 UA 101931 C2 8 UA 101931 C2 Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 9
ДивитисяДодаткова інформація
Назва патенту англійськоюUniversal earth-moving machine
Автори англійськоюDmytrychenko Mykola Fedorovych, Musiiko Volodymyr Danylovych, Biliavkovych Mykola Oleksiiovych, Leichenko Yurii Borysovych, Koval Andrii Borysovych, Kuzminets Mykola Petrovych
Назва патенту російськоюУниверсальная землеройная машина
Автори російськоюДмитриченко Николай Федорович, Мусийко Владимир Данилович, Билякович Николай Алексеевич, Лейченко Юрий Борисович, Коваль Андрей Борисович, Кузьминец Николай Петрович
МПК / Мітки
МПК: E02F 3/18, E02F 5/18, E02F 3/00, E02F 3/26
Мітки: машина, землерийна, універсальна
Код посилання
<a href="https://ua.patents.su/11-101931-universalna-zemlerijjna-mashina.html" target="_blank" rel="follow" title="База патентів України">Універсальна землерийна машина</a>
Землерийна машина

Номер патенту: 99047
Опубліковано: 10.07.2012
Автори: Романовський Олександр Леонтійович, Васильчук Олександр Юрійович, Кравець Святослав Володимирович, Процик Дмитро Іванович, Макарчук Олександр Володимирович
МПК: E02F 5/30, A01B 13/08
Мітки: машина, землерийна
Формула / Реферат:
Землерийна машина з тягачем, паралелограмною навіскою і шарнірно навішеним робочим органом, який включає несучий стояк у вигляді розрізного ножа з різальною кромкою та вухами і ґрунторозробний орган, до розрізного ножа закріплений за допомогою гнучкої тяги ґрунторозробний орган у вигляді дренера і самооборотний розпушувач, який відрізняється тим, що верхнє вухо стояка виконане з криволінійним пазом, з постійним радіусом кривизни r...
Землерийна машина

Номер патенту: 1859
Опубліковано: 20.12.1994
Автори: Рибко Олександр Володимирович, Цибізов Олександр Григорович, Биков Олександр Володимирович, Коцюба Юрій Гордійович, Кушнір Юхим Абрамович, Глазман Борис Михайлович, Сахно Борис Григорович, Фурто Геннадій Савич, Лобода Віталій Андрійович, Черних Андрій Михайлович, Молібог Олександр Вікторович
Мітки: машина, землерийна
Формула / Реферат:
Землеройная машина, включающая тягач, установленную на нем горизонтальными шарнирами промежуточную раму, раму с метателем, связанную с промежуточной рамой вертикальными шарнирами, цепной рабочий орган и опорные лыжи, отличающаяся тем, что, с целью повышения производительности разработки котлованов в мерзлых грунтах при подаче тягача задним ходом, каждая опорная лыжа установлена перед соответствующим движителем и имеет с ним общую...
Землерийна машина

Номер патенту: 34716
Опубліковано: 26.08.2008
Автори: Юрчук Володимир Петрович, Дінул Валерій Германович, Огороднік Богдан Миколайович, Мазуренко Петро Григорович
МПК: E02F 9/22
Мітки: машина, землерийна
Формула / Реферат:
Землерийна машина, що містить робочий орган, який містить раму з ланцюгами, на яких установлені балки з різцями та механізм заглиблення та підйому робочого органа для регулювання кута нахилу рами до горизонту, яка відрізняється тим, що відстань між боковими ланцюгами дорівнює 190÷210 мм і забезпечує ширину траншеї не більше 350 мм, причому кут нахилу рами до горизонту відповідає значенню 55÷60, що забезпечує глибину траншеї не...
Землерийна машина

Номер патенту: 969
Опубліковано: 15.12.1993
Автори: Фурто Геннадій Савич, Коцюба Юрій Гордійович, Биков Олександр Володимирович, Ковтанюк Микола Сергійович, Кудра Степан Юхимович, Норинський Юхим Якович, Черних Андрій Михайлович, Бандуров Володимир Михайлович
Мітки: землерийна, машина
Формула / Реферат:
(57) ЗЕМЛЕРОЙНАЯ МАШИНА, включающая установленную на тягаче с возможностью качания в горизонтальной плоскости раму с метателем и приемным лотком и шарнирно соединенный с ней цепной рабочий орган с рамой, отличающаяся тем, что, с целью расширения технологических возможностей путем обеспечения разработки котлованов в мерзлых грунтах попутным фрезерованием, она снабжена подборщиком грунта, выполненным в виде зачистного ножа, соединенного желобом...
Ручна землерийна машина

Номер патенту: 24240
Опубліковано: 25.06.2007
Автори: Голубченко Олександр Іванович, Соколов Ігор Анатолійович, Хмара Леонід Андрійович, Кроль Роман Миколайович
МПК: E02F 3/76
Мітки: ручна, землерийна, машина
Формула / Реферат:
Ручна землерийна машина, що містить базову раму з привідними колесами і двигуном та рукоять керування, яка відрізняється тим, що вона додатково обладнана відвалом, перед яким в опорах встановлено шнековий робочий орган з ланцюговою передачею та електродвигуном, при цьому відвал шарнірно з'єднаний з базовою рамою за допомогою паралелограмної підвіски з електроштовхачем.
Попередній патент: Машина для встановлення виноградної шпалерної опори
Наступний патент: Спосіб одержання високопористого фотоактивного діоксиду титану
Випадковий патент: Культиватор для міжрядкового обробітку грунту