Спосіб підвищення ефективності виявлення та супроводження надводних цілей навігаційною радіолокаційною станцією незалежно від стану морської поверхні
Номер патенту: 119985
Опубліковано: 25.10.2017
Автори: Стеценко Максим Сергійович, Корбан Дмитро Вікторович, Губський Олександр Геннадійович, Голіков Володимир Володимирович

Формула / Реферат
Спосіб підвищення ефективності виявлення та супроводження надводних об'єктів судновою навігаційною радіолокаційною станцією незалежно від стану морської поверхні за рахунок часового автоматичного регулювання підсилення прийнятого радіосигналу, який відрізняється тим, що для виявлення та супроводження використовується суднова навігаційна радіолокаційна станція, яка випромінює електромагнітні імпульси вертикальної або горизонтальної поляризації, а на індикаторі кругового огляду цієї станції формується зображення об'єкта, рівень сигналу якого лежить нижче встановленого рівня підсилення, у той момент, коли обчислена різниця між значенням еталонної потужності радіохвилі від морської поверхні, що є вільною від надводних об'єктів, та потужністю прийнятої антеною станції радіохвилі у кожний момент часу у відповідності до поточного значення швидкості вітру або висоти морських хвиль є від'ємною.
Текст
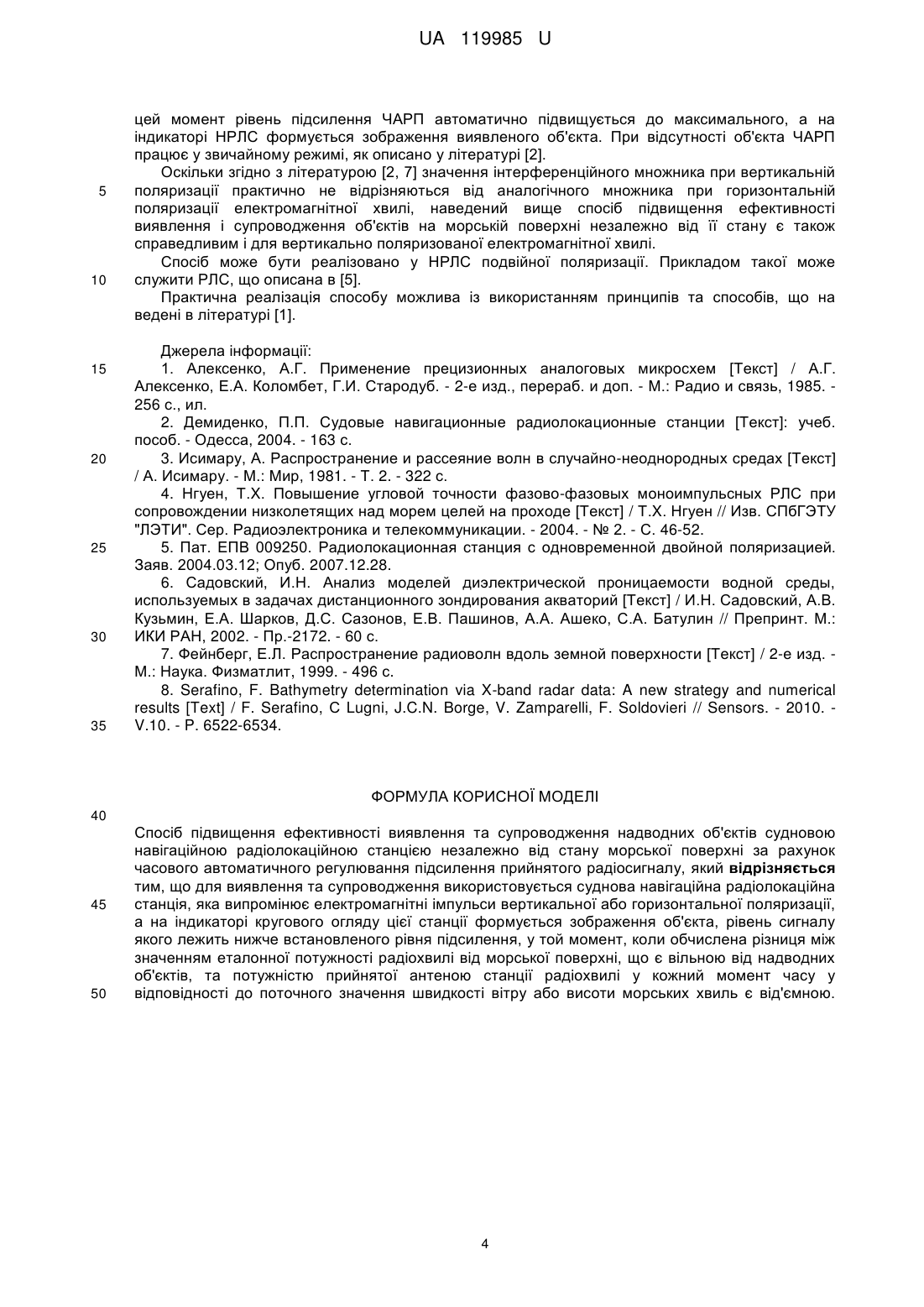
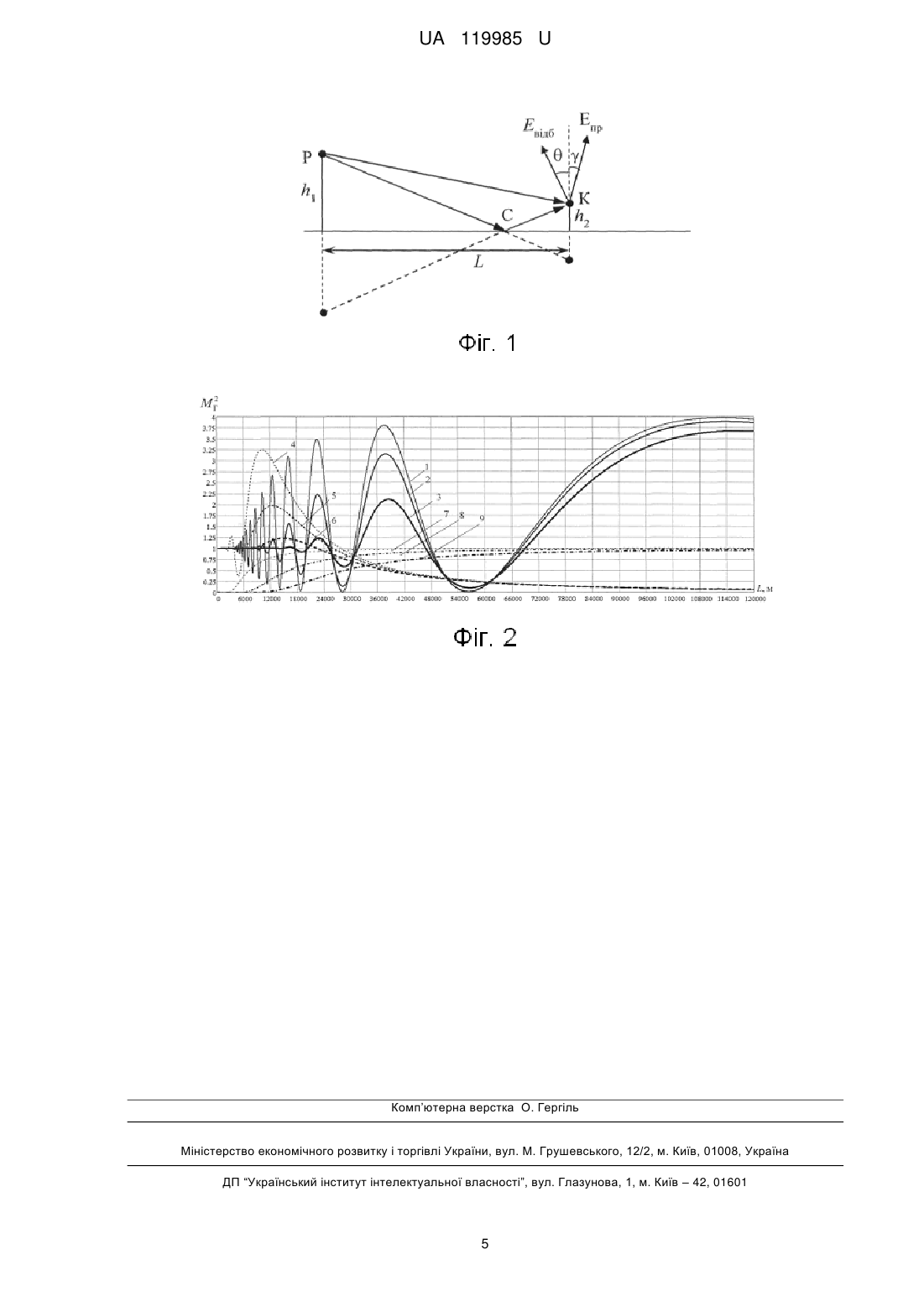
Реферат: Спосіб підвищення ефективності виявлення та супроводження надводних об'єктів судновою навігаційною радіолокаційною станцією незалежно від стану морської поверхні за рахунок часового автоматичного регулювання підсилення прийнятого радіосигналу. Для виявлення та супроводження використовується суднова навігаційна радіолокаційна станція, яка випромінює електромагнітні імпульси вертикальної або горизонтальної поляризації. На індикаторі кругового огляду цієї станції формується зображення об'єкта, рівень сигналу якого лежить нижче встановленого рівня підсилення, у той момент, коли обчислена різниця між значенням еталонної потужності радіохвилі від морської поверхні, що є вільною від надводних об'єктів, та потужністю прийнятої антеною станції радіохвилі у кожний момент часу у відповідності до поточного значення швидкості вітру або висоти морських хвиль є від'ємною. UA 119985 U (12) UA 119985 U UA 119985 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до радіолокації та може бути використана у суднових навігаційних радіолокаційних станціях (НРЛС) для підвищення ефективності виявлення та супроводження цілей на морській поверхні. Відома навігаційна радіолокаційна станція, принцип роботи якої полягає в імпульсному випромінюванні електромагнітної хвилі та прийомі цієї хвилі через проміжок часу після відбиття від об'єкта, що знаходиться у зоні виявлення [2]. На даний час суднові НРЛС є одним з найважливіших засобів забезпечення безпеки судноводіння, особливо в нічний час і в умовах поганої видимості. Характерною особливістю функціонування суднових НРЛС є необхідність забезпечення ефективного виявлення надводних і берегових цілей в умовах хвилювання морської поверхні. Ефективним засобом боротьби з завадами, що з'являються від морського хвилювання, а також від близько розташованих об'єктів, є часове автоматичне регулювання підсилення (ЧАРП) [2]. ЧАРП необхідне для вирівнювання інтенсивності сигналів від об'єктів, що знаходяться на різних відстанях від антени НРЛС, забезпечуючи тим самим однакове (рівномірне) відображення на екрані індикатора кругового огляду цілей, які перебувають на різних дистанціях. Оскільки енергія, відбита від об'єктів, що знаходяться на невеликій відстані від НРЛС, на кілька порядків більше, ніж від віддалених, тому приймач НРЛС буде перевантажений сигналами від близьких об'єктів, зокрема - від морських хвиль, в той час як ехо-сигнали від маломірних цілей (наприклад, буй, невеликі судна, катери, шлюпки) можуть бути подавлені і не виявлені своєчасно. ЧАРП формує керуючу напругу (напруга зсуву в каскадах підсилювача проміжної частоти ППЧ) таким чином, щоб підсилення приймача зростало зі збільшенням дистанції до об'єкта. Практично керуюча напруга ЧАРП має експоненціальну характеристику. Принцип формування напруги ЧАРП полягає у тому, що одночасно з випромінюванням зондуючого імпульсу, автоматично включається схема часового регулювання підсилення приймача, яка формує імпульс, що складається з прямокутного імпульсу (тривалість якого дорівнює тривалості зондуючого імпульсу) та експоненціальної складової. Прямокутна складова сигналу ЧАРП замикає каскади підсилення приймача на час випромінювання зондуючого імпульсу, а експоненціальна складова плавно, по експоненті, поступово відмикає ці каскади, тим самим збільшуючи підсилення приймача у часі (тобто по дальності). Недоліком наведеного способу забезпечення ефективного виявлення надводних і берегових цілей в умовах хвилювання морської поверхні є відносність його "автоматичної роботи", оскільки рівень регулювання підсилення визначається оператором на підставі візуального аналізу зображення на індикаторі кругового огляду. Тому ефективність його роботи вимагає постійного втручання оператора при зміні погодних умов. Відомий інший спосіб боротьби з перешкодами, що полягає у застосуванні логарифмічного ППЧ з диференціюючою ланкою, що має малу постійну часу (МПЧ), завдяки чому знижується рівень віддзеркалень від моря і дощу до рівня власних шумів [2]. Після диференціюючої ланки з МПЧ з вихідного сигналу ППЧ виключається постійна складова (видаляється середнє значення), і амплітуда перешкод від морської поверхні буде на будь-яких відстанях на одному рівні з шумом. Отже, на виході логарифмічного ППЧ перешкоди значно ослаблені, а амплітуди слабких і сильних відбитих імпульсів вирівнюються; регулювання посилення в процесі роботи не потрібно. Для більш ефективного придушення перешкод від морської поверхні застосовується ЧАРП, яке здійснюється в кількох лінійних каскадах, включених перед логарифмічним. Загальним недоліком наведених способів є відсутність порівняльної селективності прийнятих радіосигналів від об'єктів на морській поверхні та природних завад. На підставі викладеного, як прототип способу забезпечення ефективного виявлення надводних і берегових цілей в умовах хвилювання морської поверхні приймемо зазначений вище спосіб використання ЧАРП. Задачею корисної моделі є створення способу підвищення ефективності виявлення та супроводження надводних цілей судновою навігаційною радіолокаційною станцією незалежно від стану морської поверхні шляхом використання часового автоматичного регулювання підсилення у відповідному каскаді НРЛС, що має додаткову функцію порівняльної селективності підсилення прийнятих радіосигналів. Поставлена задача вирішується тим, що підвищення ефективності виявлення та супроводження надводних цілей судновою навігаційною радіолокаційною станцією незалежно від стану морської поверхні забезпечується за рахунок способу, в основі якого лежить використання часового автоматичного регулювання підсилення прийнятого радіосигналу, згідно 1 UA 119985 U 5 10 15 20 з корисною моделлю, для виявлення та супроводження використовується суднова навігаційна радіолокаційна станція, що випромінює електромагнітні імпульси вертикальної або горизонтальної поляризації, а на індикаторі кругового огляду цієї станції формується зображення об'єкта, рівень сигналу якого лежить нижче встановленого рівня чутливості, у той момент, коли обчислена різниця між значенням еталонної потужності радіохвилі від морської поверхні, що є вільною від надводних об'єктів, та потужністю прийнятої антеною станції радіохвилі у кожний момент часу у відповідності до поточного значення швидкості вітру або висоти морських хвиль є від'ємною. Технічний результат вирішується завдяки тому, що рівень підсилення прийнятого радіосигналу у каскаді ЧАРП може бути ступінчасто змінено до максимального в автоматичному режимі при прийомі радіосигналу низької потужності від об'єкта в умовах як незначного, так і значного хвилювання морської поверхні. Спосіб пояснюється кресленнями, де на фіг. 1 зображено схему роботи НРЛС з піднятою антеною з урахуванням перевідбиття радіохвиль від морської поверхні. Піднятою вважається антена, яка живиться невипромінюючим фідером і розташована на відстані не менше кількох від земної поверхні. В точці Р розташована антена суднової НРЛС, що в імпульсному режимі випромінює електромагнітну хвилю потужністю PД . У точку Κ (фіг. 1) приходять як прямий промінь з напруженістю Eпр , так і відбитий від поверхні промінь з Eвідб . Для плоскої хвилі згідно з літературою [7] 2 i t r Eпр Em (r )e 2 i t (r r ) , та Eвідб Em (r r ) R e де r PK , r r PC CK , R - коефіцієнт відбиття в точці С, визначає можливу зміну фази електромагнітної хвилі при відбитті. 25 Згідно з Фіг. 1, r L2 (h1 h2 )2 і r r L2 (h1 h2 )2 , де L - дистанція до об'єкта виявлення, h1 і h 2 відстань від морської поверхні до антени НРЛС (тобто висота надводної частини судна) та висота об'єкта виявлення, відповідно. У загальному вигляді для напруженості електромагнітного поля справедливим є вираз E Em 2 30 30PДG r M , (1) в якому інтерференційний множник M визначається окремо для кожного виду поляризації; G - коефіцієнт підсилення антени. Інтерференційний множник при горизонтальній поляризації визначається, як 2 r r 2 2 MГ 1 RГ cos r Г , 2 RГ r r r r де RГ і Г - коефіцієнт відбиття і зміна фази при відбитті, відповідно. Для вертикальної поляризації інтерференційний множник приймає вигляд 35 MВ 2 r r 2 cos r В , 2 RВ cos cos r r r r cos 2 RВ 2 cos 2 де arctg 40 h1 h2 , h h2 . arctg 1 L L Коефіцієнти відбиття від морської поверхні враховують вплив висоти хвиль, кута ковзання і електричних властивостей середовища на величину електромагнітної енергії перевідбитого сигналу. У загальному вигляді коефіцієнт відбиття з урахуванням стану морської поверхні виражається, як [4] 2 8 2 h sin2 , (2) R Fe де F - коефіцієнт відбиття Френеля, який визначається окремо для вертикально і 45 2 2 горизонтально поляризованої електромагнітної хвилі [6, 7]; h - дисперсія піднесень поверхні; - довжина електромагнітної хвилі. 2 UA 119985 U 5 10 Відносна діелектрична проникність морської води під поверхнею розділу океан-атмосфера не є константою. Вона залежить від температури, солоності і частоти падаючої на поверхню радіохвилі [3, 6]. Згідно з літературою [3, 6] наведені нижче результати розрахунків були отримані, використовуючи значення діелектричної проникності морської води: мв 55 29,7i . Однією з найбільш поширених в радіоокеанографії моделей хвильового поля є спектральна модель Пірсона-Московітца [8]. Модель описує розвинене хвильове поле, характеристики якого визначаються єдиним параметром - швидкістю і напрямом вітру. В рамках цієї моделі дисперсія піднесень поверхні описується виразом 2 h 2,74 10 3 U10 4 g2 2,47 10 3 U20 4 g2 , 15 де g - гравітаційне прискорення; U10 і U20 - швидкість вітру на висотах 10 і 20 м над незбуреною морською поверхнею, відповідно. Відмітимо, що висота хвиль на поверхні моря за теорією Пірсона-Московітца визначається, як H1 3 4h , 20 де H1 3 - висота найвищих хвиль. Зміна фази відбитого сигналу визначається співвідношенням уявної та дійсної частин коефіцієнта Френеля, що входить до виразу (2). Для потужності електромагнітного поля в точці К, де знаходиться об'єкт виявлення, з урахуванням виразу (1) отримаємо [6]: 2 30P G Д , (3) PK ПS э r 120 M Sэ де S э - ефективна площа розсіювання об'єкта виявлення. 25 30 35 40 45 50 Як видно з рівняння (3), інтерференційний множник M є змінним параметром, що визначає значення потужності відбитого у бік антени НРЛС корисного сигналу. З метою визначення впливу цьому параметрі на ефективність роботи НРЛС необхідно дослідити його залежність від дистанції до об'єкта та швидкості вітру, тобто висоти хвиль на поверхні моря. 2 На фіг. 2 представлені результати розрахунків для MГ при виявлені маломірного судна (h1=30 м і h2=2,5 м) у порівнянні з виявленням судна великого розміру (h1=h2=30 м) та його величина при відсутності об'єктів на морській поверхні. Графіки 1, 2, 3 ілюструють зміну інтерференційного множника при виявленні судна великого розміру при висоті хвиль 2, 4,5 і 8 метрів, відповідно. Графіки 4, 5, 6 ілюструють зміну інтерференційного множника при виявленні маломірного судна при висоті хвиль 2, 4,5 і 8 метрів, відповідно. Графіки 7, 8, 9 ілюструють зміну інтерференційного множника при відбитті радіохвиль від морської поверхні при висоті хвиль 2, 4,5 і 8 метрів, відповідно; Як видно з Фіг. 2, абсолютна величина інтерференційного множника та кількість максимумів і мінімумів уздовж радіолокаційної траси прямо пропорційна висоті об'єкта виявлення і зворотно пропорційна висоті морських хвиль. При відсутності об'єкта виявлення поведінка інтерференційного множника інша. Його чисельне значення не містить екстремумів і повільно зростає з відстанню. Висота морських хвиль у цьому випадку впливає на відстань, при якій вищезазначений множник почне своє зростання від нуля до одиниці. Таким чином, представляється можливість виявлення судна різних габаритних розмірів, використовуючи алгебраїчні обчислення у відповідному каскаді НРЛС. Оскільки, величина чутливості на індикаторі НРЛС, як правило, встановлюється оператором вище значення, при якому відображається сигнал відбитий від морської поверхні, то можна сказати, що всі значення потужності радіосигналу на вході, які є меншими за рівень потужності радіосигналу від перешкод будуть проігноровані. Це призводить до зменшення ефективності виявлення і супроводження об'єктів НРЛС. Для підвищення ефективності НРЛС необхідно враховувати сигнал, що лежить нижче встановленої чутливості. Для цього необхідно безперервно обчислювати різницю між значенням еталонної потужності сигналу при прийомі радіохвилі від морської поверхні, що є вільною від надводних об'єктів, та потужністю прийнятої радіохвилі у кожний момент часу у відповідності до поточного значення швидкості вітру або висоти морських хвиль. Якщо ця різниця нижча за встановлений рівень, то на радіолокаційній трасі знаходиться об'єкт, габаритні розміри та/або дистанція якого відповідають малому значенню інтерференційного множника. В 3 UA 119985 U 5 10 15 20 25 30 35 цей момент рівень підсилення ЧАРП автоматично підвищується до максимального, а на індикаторі НРЛС формується зображення виявленого об'єкта. При відсутності об'єкта ЧАРП працює у звичайному режимі, як описано у літературі [2]. Оскільки згідно з літературою [2, 7] значення інтерференційного множника при вертикальній поляризації практично не відрізняються від аналогічного множника при горизонтальній поляризації електромагнітної хвилі, наведений вище спосіб підвищення ефективності виявлення і супроводження об'єктів на морській поверхні незалежно від її стану є також справедливим і для вертикально поляризованої електромагнітної хвилі. Спосіб може бути реалізовано у НРЛС подвійної поляризації. Прикладом такої може служити РЛС, що описана в [5]. Практична реалізація способу можлива із використанням принципів та способів, що на ведені в літературі [1]. Джерела інформації: 1. Алексенко, А.Г. Применение прецизионных аналоговых микросхем [Текст] / А.Г. Алексенко, Е.А. Коломбет, Г.И. Стародуб. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1985. 256 с., ил. 2. Демиденко, П.П. Судовые навигационные радиолокационные станции [Текст]: учеб. пособ. - Одесса, 2004. - 163 с. 3. Исимару, А. Распространение и рассеяние волн в случайно-неоднородных средах [Текст] / А. Исимару. - М.: Мир, 1981. - Т. 2. - 322 с. 4. Нгуен, Т.X. Повышение угловой точности фазово-фазовых моноимпульсных РЛС при сопровождении низколетящих над морем целей на проходе [Текст] / Т.X. Нгуен // Изв. СПбГЭТУ "ЛЭТИ". Сер. Радиоэлектроника и телекоммуникации. - 2004. - № 2. - С. 46-52. 5. Пат. ЕПВ 009250. Радиолокационная станция с одновременной двойной поляризацией. Заяв. 2004.03.12; Опуб. 2007.12.28. 6. Садовский, И.Н. Анализ моделей диэлектрической проницаемости водной среды, используемых в задачах дистанционного зондирования акваторий [Текст] / И.Н. Садовский, А.В. Кузьмин, Е.А. Шарков, Д.С. Сазонов, Е.В. Пашинов, А.А. Ашеко, С.А. Батулин // Препринт. М.: ИКИ РАН, 2002. - Пр.-2172. - 60 с. 7. Фейнберг, Е.Л. Распространение радиоволн вдоль земной поверхности [Текст] / 2-е изд. М.: Наука. Физматлит, 1999. - 496 с. 8. Serafino, F. Bathymetry determination via X-band radar data: A new strategy and numerical results [Text] / F. Serafino, С Lugni, J.C.N. Borge, V. Zamparelli, F. Soldovieri // Sensors. - 2010. V.10. - P. 6522-6534. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Спосіб підвищення ефективності виявлення та супроводження надводних об'єктів судновою навігаційною радіолокаційною станцією незалежно від стану морської поверхні за рахунок часового автоматичного регулювання підсилення прийнятого радіосигналу, який відрізняється тим, що для виявлення та супроводження використовується суднова навігаційна радіолокаційна станція, яка випромінює електромагнітні імпульси вертикальної або горизонтальної поляризації, а на індикаторі кругового огляду цієї станції формується зображення об'єкта, рівень сигналу якого лежить нижче встановленого рівня підсилення, у той момент, коли обчислена різниця між значенням еталонної потужності радіохвилі від морської поверхні, що є вільною від надводних об'єктів, та потужністю прийнятої антеною станції радіохвилі у кожний момент часу у відповідності до поточного значення швидкості вітру або висоти морських хвиль є від'ємною. 4 UA 119985 U Комп’ютерна верстка О. Гергіль Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/66, G01S 7/12, G01S 13/00
Мітки: спосіб, підвищення, морської, виявлення, супроводження, поверхні, ефективності, цілей, незалежно, надводних, радіолокаційною, стану, станцією, навігаційною
Код посилання
<a href="https://ua.patents.su/7-119985-sposib-pidvishhennya-efektivnosti-viyavlennya-ta-suprovodzhennya-nadvodnikh-cilejj-navigacijjnoyu-radiolokacijjnoyu-stanciehyu-nezalezhno-vid-stanu-morsko-poverkhni.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення ефективності виявлення та супроводження надводних цілей навігаційною радіолокаційною станцією незалежно від стану морської поверхні</a>
Система виявлення, розпізнавання, супроводження повітряних та наземних цілей
Номер патенту: 104494
Опубліковано: 10.02.2016
Автори: Дупелич Сергій Олексійович, Даник Юрій Григорович
МПК: G01S 13/00, G01S 17/00, G01S 11/00
Мітки: повітряних, наземних, виявлення, цілей, система, супроводження, розпізнавання
Формула / Реферат:
Система виявлення, розпізнавання, супроводження повітряних та наземних цілей, що містить комплекс засобів радіолокації, який оснащено засобами пасивної та активної радіолокації, засобами державної системи радіолокаційного розпізнавання, комплекс засобів автоматизації, при цьому комплекс засобів радіолокації пов'язаний каналом передачі розвідувальних даних з комплексом засобів автоматизації, який у свою чергу пов'язаний каналом видачі...
Спосіб підвищення ефективності ураження повітряних цілей зенітним ракетним комплексом
Номер патенту: 52154
Опубліковано: 10.08.2010
Автор: Голуб Валентин Антонович
МПК: F41J 9/00
Мітки: повітряних, спосіб, ракетним, комплексом, ефективності, ураження, зенітним, цілей, підвищення
Формула / Реферат:
1. Спосіб підвищення ефективності ураження повітряних цілей зенітним ракетним комплексом, при якому проводять виявлення повітряної цілі, супроводження її, вмикання контуру самонаведення бойової ракети, вироблення команди керування польотом бойової ракети і дію самонаведення бойової ракети на повітряну ціль, що супроводжується, який відрізняється тим, що після виявлення повітряної цілі виконують запуск пункта управління у вигляді ракети в...
Надшвидкісний засіб ураження надводних та підводних цілей
Номер патенту: 47374
Опубліковано: 25.01.2010
Автори: Слєпов Лев Іванович, Даневич Володимир Феодосійович, Блаженний Валерій Іванович, Бєляєв Сергій Юрійович
МПК: F42B 17/00
Мітки: ураження, підводних, засіб, надшвидкісний, надводних, цілей
Формула / Реферат:
Надшвидкісний засіб ураження надводних та підводних цілей, який містить корпус, основне сопло реактивної тяги, бойовий заряд, реактивний двигун, пристрій керування, який відрізняється тим, що додатково містить розподільчий пристрій та одне або більше додаткові сопла реактивної тяги, які розміщені в передній частині корпусу, під кутом до 45° від подовжньої осі в напрямку руху надшвидкісного засобу ураження надводних та підводних цілей.
Спосіб знищення надводних морських/річкових цілей за допомогою літальних апаратів
Номер патенту: 100190
Опубліковано: 10.07.2015
Автори: Овсяннікова Тетяна Миколаївна, Федонюк Сергій Анатолійович, Сендецький Микола Миколайович, Гудима Олег Петрович, Старозуб Олександр Олегович, Лісовський Валентин Володимирович, Башинський Володимир Георгійович, Бойко Андрій Андрійович, Комаров Володимир Олександрович, Дмитренко Тарас Васильович, Комина Роман Валерійович, Семененко Алла Володимирівна, Четвертнов Даніла Іванович, Ткаченко Володимир Анатолійович, Куровська Тетяна Юріївна, Галушка Володимир Іванович
МПК: G05D 1/00, G05B 13/00
Мітки: допомогою, апаратів, знищення, надводних, цілей, літальних, спосіб
Формула / Реферат:
1. Спосіб знищення надводних морських/річкових цілей за допомогою літальних апаратів, при якому попередньо підготовляють один, два або більше літальних апаратів, споряджають кожний з підготовлених літальних апаратів вибуховою речовиною або боєприпасами, забезпечують зліт спорядженого літального апарата і політ до цілі, проводять пошук цілі, здійснюють у районі цілі наведення літального апарата на ціль, а знищення цілі здійснюють шляхом...
Надшвидкісний засіб ураження надводних та підводних цілей
Номер патенту: 94336
Опубліковано: 10.11.2014
Автор: Кузнецов Данило Олександрович
МПК: F42B 17/00
Мітки: засіб, надшвидкісний, цілей, підводних, надводних, ураження
Формула / Реферат:
1. Надшвидкісний засіб ураження надводних та підводних цілей, який містить корпус, основне та додаткові сопла реактивної тяги, бойовий заряд, реактивний двигун та систему керування, який відрізняється тим, що додатково містить закріплене згори крило, що забезпечує рух до віддаленої цілі над поверхнею води за рахунок динамічної повітряної подушки.2. Засіб за п. 1, який відрізняється тим, крило має власний двигун та пристрій для...
Попередній патент: Спосіб визначення довжини заглибленої у ґрунт стрижневої конструкції
Наступний патент: Прилад для вимірювання складових сумарної потужності втрат електроенергії в трифазній системі електропостачання
Випадковий патент: Спосіб знепилювання процесу розвантаження пиловловлювача доменної печі