Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок
Номер патенту: 122975
Опубліковано: 12.02.2018
Автори: Дудніков Володимир Степанович, Потірай Ростислав Тарасович

Формула / Реферат
1. Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок, що включає два ідентичних інкрементальних енкодера з лічильниками імпульсів, які розташовані на однаковій відстані від осі вала і паралельно їй, рознесені по довжині і мають кінематичний зв'язок з перерізами вала на кінцях циліндричної ділянки з постійними розмірами поперечного перерізу, що забезпечує синхронне обертання енкодерів, який відрізняється тим, що на валах енкодерів встановлені мірні диски, а самі енкодери закріплені на вертикальних стінках замкненої прямокутної рамки, яка нависає зверху над валом, при цьому якщо енкодери закріплені на одній стороні вертикальних стінок, перпендикулярних осі вала, то на іншій стороні тих же стінок закріплені обертові ролики так, що вал розташовується поміж дисками енкодерів і роликами, що контактують з ним, на інших вертикальних стінках рамки, паралельних осі вала, закріплені вертикальні стержні, які виконують роль упорів.
2. Пристрій за п. 1, який відрізняється тим, що вертикальні стержні виконані у вигляді регульованих по довжині, наприклад, телескопічно з'єднаних трубок з елементами їх взаємної фіксації.
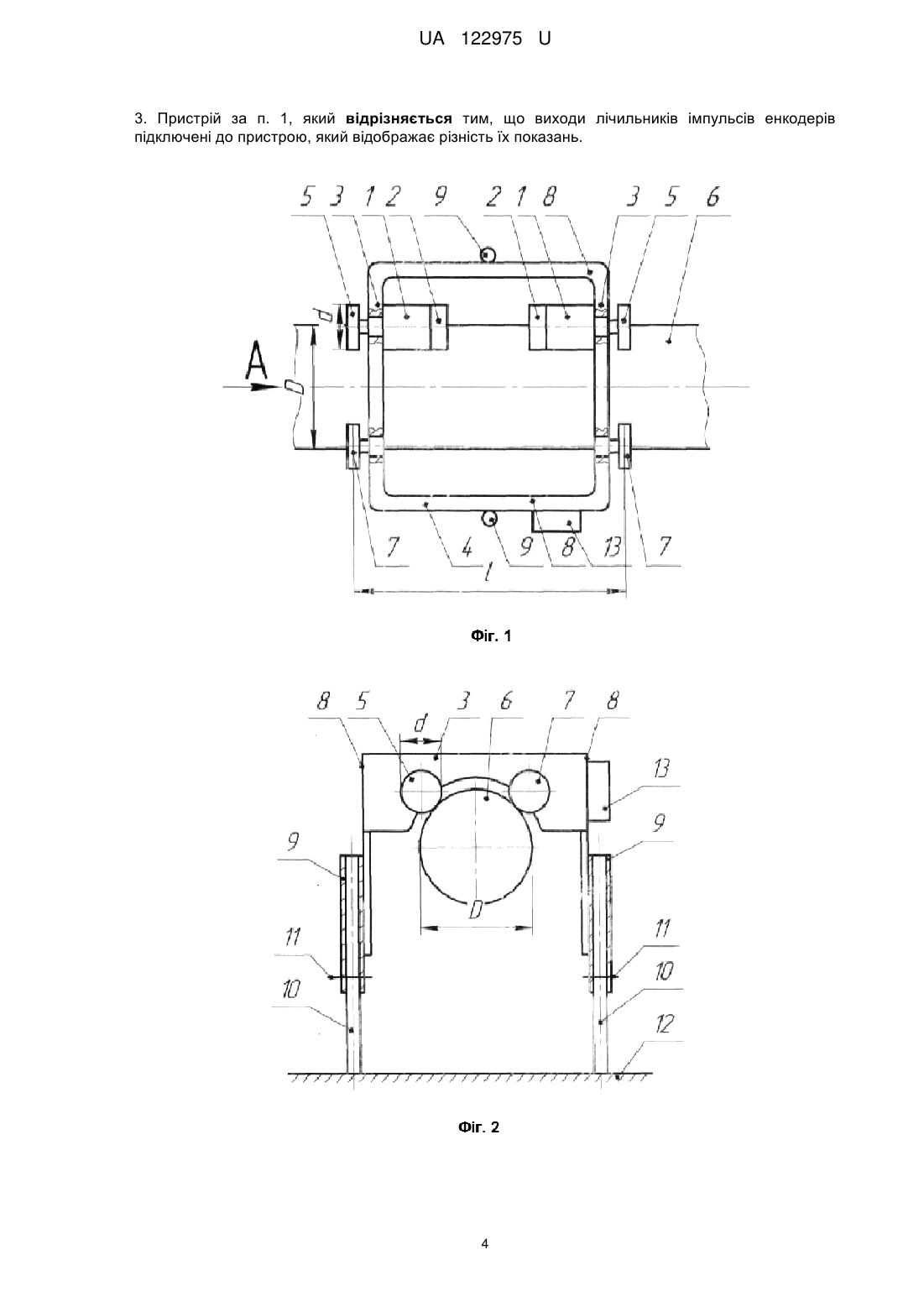
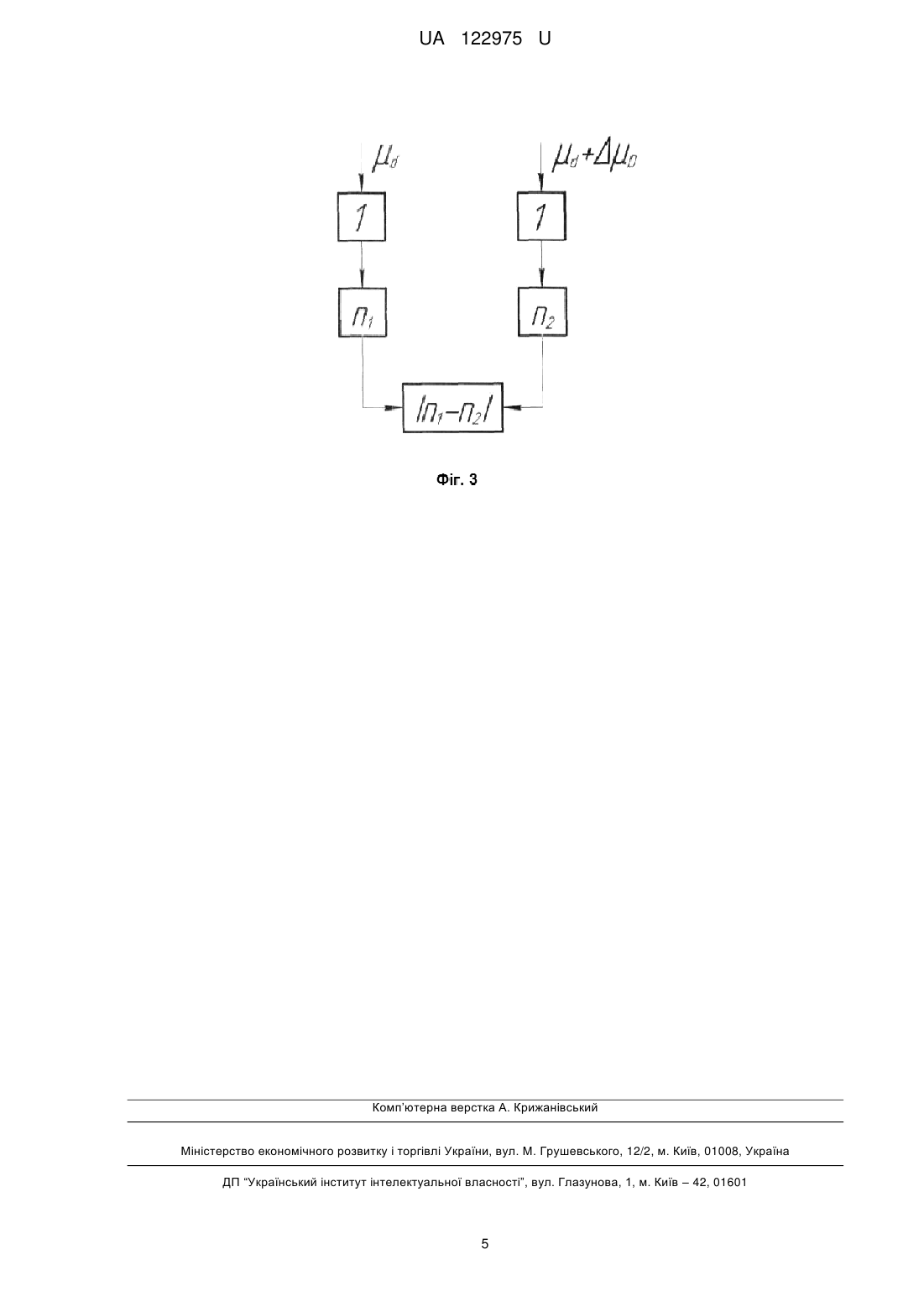
3. Пристрій за п. 1, який відрізняється тим, що виходи лічильників імпульсів енкодерів підключені до пристрою, який відображає різність їх показань.
Текст
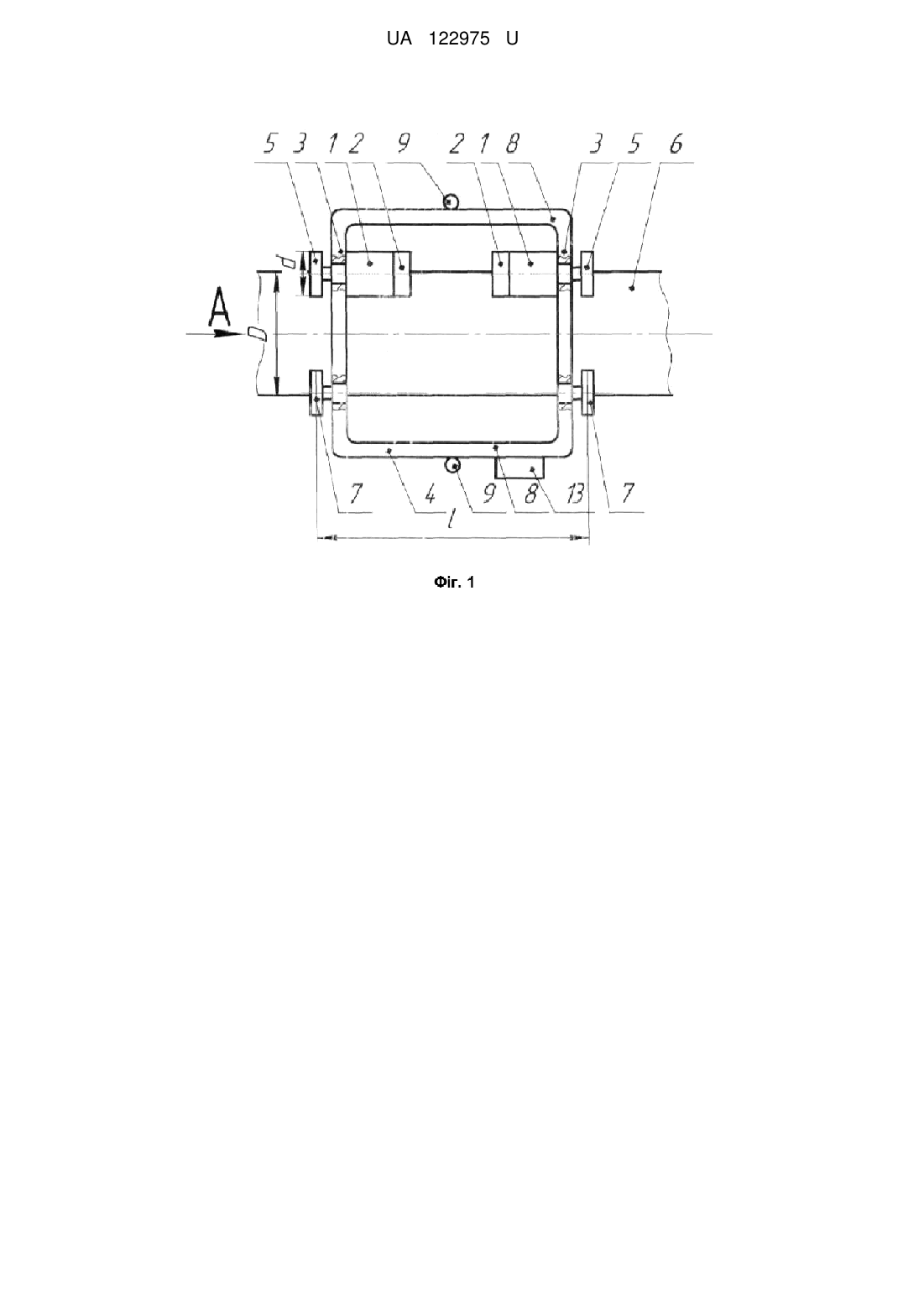
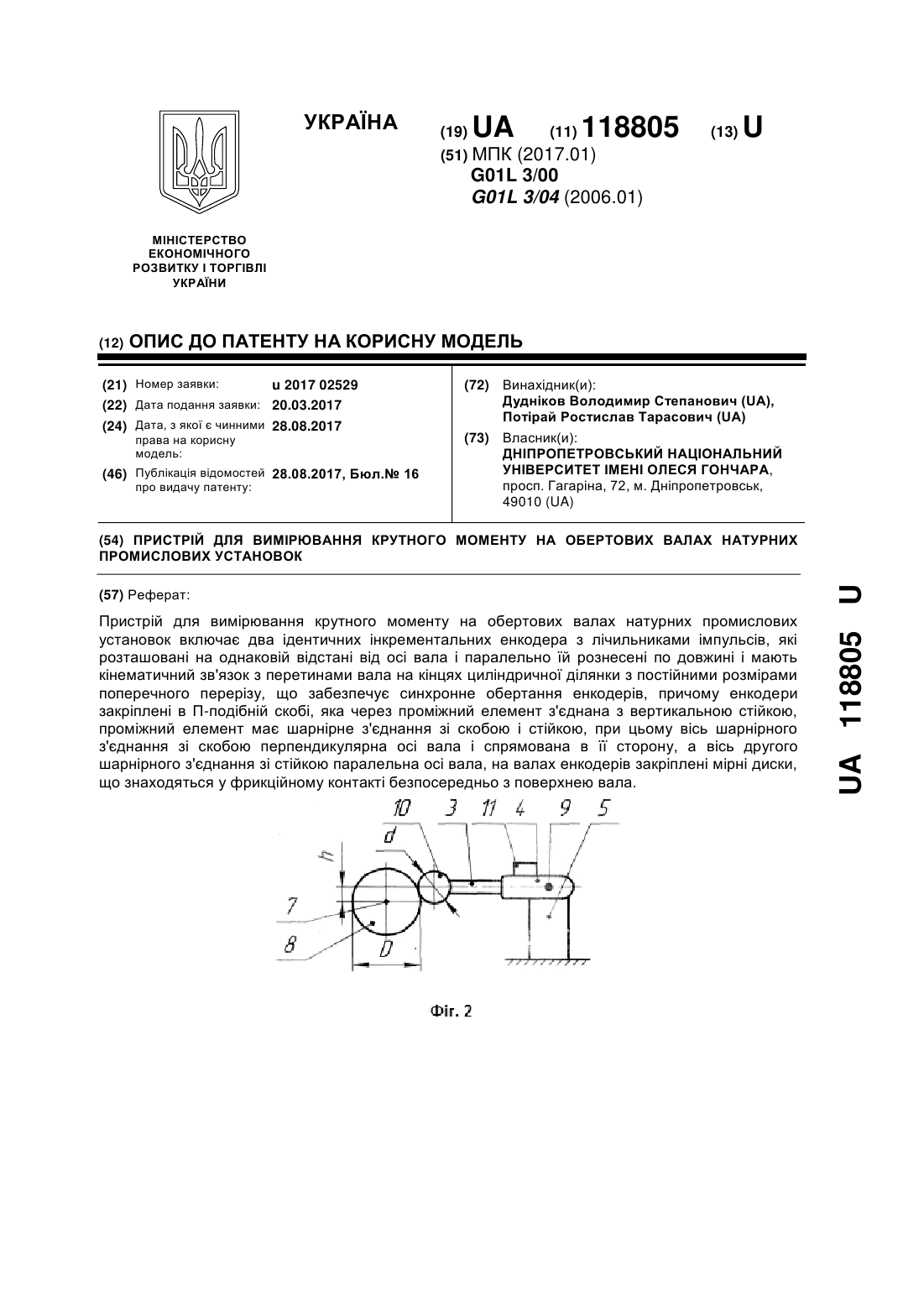
Реферат: Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок включає два ідентичних інкрементальних енкодера з лічильниками імпульсів. Лічильники імпульсів розташовані на однаковій відстані від осі вала і паралельно їй, рознесені по довжині і мають кінематичний зв'язок з перерізами валу на кінцях циліндричної ділянки з постійними розмірами поперечного перерізу. На валах енкодерів встановлені мірні диски. Енкодери закріплені на вертикальних стінках замкненої прямокутної рамки, яка нависає зверху над валом. Якщо енкодери закріплені на одній стороні вертикальних стінок, перпендикулярних осі вала, то на іншій стороні тих же стінок закріплені обертові ролики так, що вал розташовується поміж дисками енкодерів і роликами, що контактують з ним. На інших вертикальних стінках рамки, паралельних осі вала, закріплені вертикальні стержні, які виконують роль упорів. UA 122975 U (54) ПРИСТРІЙ ДЛЯ ВИМІРЮВАННЯ КРУТНОГО МОМЕНТУ НА ОБЕРТОВИХ ВАЛАХ НАТУРНИХ ПРОМИСЛОВИХ УСТАНОВОК UA 122975 U UA 122975 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв для вимірювання крутних моментів на обертових валах. Може бути використана в різних галузях народного господарства для експериментального визначення крутних моментів на натурних діючих зразках техніки з обертовими валами. Крутний момент на валах технічних пристроїв є важливою характеристикою, яка визначає межі застосування і ефективність використання пристроїв. Вимірювання його, особливо на обертових валах, є складним технічним завданням, для вирішення якого в світі розроблено значна кількість пристроїв з різними принципами дії [1]. Одним з поширених методів вимірювання крутного моменту на обертових валах є використання тензометричного моста [1; 2]. У цьому випадку на вал наклеюються тензометри опору під кутом 45° до осі обертання, електрично з'єднані по мостовій схемі. Точки живлення та діагоналі моста виводяться на колекторні кільця, закріплені на валу (4 кільця). З колекторних кілець електричний сигнал знімається за допомогою щіток. Напруга в діагоналі моста пропорційна крутному моменту. Відомим аналогом є індукційний фазочутливий торсіометр, який дозволяє оцінити крутний момент по куту скручування вала [3]. Для цього на валу жорстко кріпляться зубчасті диски з феромагнітного матеріалу. Зубці дисків з зазором рухаються в пазах нерухомо закріплених індукційних датчиків у вигляді П-подібних сердечників з обмотками. По обмоткам тече змінний струм, магнітний потік сердечників замикається через зубці дисків і, якщо вал нерухомий, фази напруг на виході датчиків збігаються. При обертанні під навантаженням вал скручується, зубці дисків зміщуються один щодо іншого, і порушується синхронність замикання магнітних потоків датчиків. Це призводить до різниці фаз сигналів, що надходять від датчиків на вхід фазочутливого блока. Пропорційно крутному моменту вала формується аналоговий сигнал. Відомим аналогом є фоточутливий датчик, принцип дії якого заснований на зміні інтенсивності світлового потоку, що йде від джерела до фотоелементу [4]. Датчик містить два диска, закріплених на кінцях базової ділянки вала. У дисках прорізані радіальні щілини, через які промінь світла від джерела проходить до фотоелемента. При відсутності крутного моменту щілини в дисках збігаються. При збільшенні крутного моменту зросте кутовий зсув між щілинами в дисках, в результаті чого зменшується середня освітленість фотоелемента, обернено пропорційна величині крутного моменту. Загальним недоліком аналогів є неможливість їх використання і застосування до реальних діючих зразків техніки, якщо вони для цього спеціально не були пристосовані або, не можуть бути доопрацьовані, наприклад, шляхом установки замкнутих колекторних кілець при тензометричному способі вимірювання. У виробничих умовах дуже складно забезпечити точну узгодженість взаємного розташування двох зубчастих дисків (індуктивний фазочутливий торсіометр) і дисків з радіальними щілинами (фотоелектричний датчик), які при цьому повинні бути виконані роз'ємними з двох половин. Найближчим аналогом до корисної моделі є пристрій для вимірювання крутного моменту на обертовому валу, що включає два ідентичних інкрементальних енкодера з лічильниками імпульсів, розташовані на однаковій відстані від осі зала і паралельно їй, рознесені по довжині і мають кінематичний зв'язок з перетинами вала на кінцях циліндричної ділянки з постійними розмірами поперечного перерізу, що забезпечує синхронне обертання енкодерів [5]. Кінематичний зв'язок виконаний у вигляді гнучкої пасової передачі. На валу енкодера закріплений шків під ремінь круглого поперечного перерізу, який охоплює вал, а як другий шків виступає циліндрична поверхня самого вала, на якому вимірюється крутний момент. Передавальне відношення пасової передачі 1:1. Тоді відносний кутовий зсув двох контрольних точок, які лежать на одній циліндричній поверхні вала, відповідний куту закручування вала, може бути визначено як різниця імпульсів двох енкодерів. Такий пристрій для вимірювання крутного моменту може бути реалізовано тільки в тому випадку, якщо буде можливість заздалегідь одягнути ремінь на вал, наприклад при складанні або при мінімальному демонтажі і подальшому монтажі опорних вузлів, що не завжди доцільно і можливо в принципі. В основу корисної моделі поставлена задача вдосконалення пристрою для вимірювання крутного моменту на обертових валах будь-яких виробничих машин без додаткових доробок конструкції і демонтажно-монтажних робіт. Поставлена задача вирішується тим, що в пристрої для вимірювання крутного моменту на обертовому валу, якій включає два ідентичних інкрементальних енкодера з лічильниками імпульсів, які розташовані на однаковій відстані від осі вала і паралельно їй, рознесені по довжині і мають кінематичний зв'язок з перетинами вала на кінцях циліндричної ділянки з постійними розмірами поперечного перерізу, що забезпечує синхронне обертання енкодерів, 1 UA 122975 U 5 10 15 20 25 30 35 40 45 згідно з корисною моделлю, на валах енкодерів встановлені мірні диски, а самі енкодери закріплені на вертикальних стінках замкненої прямокутної рамки, яка нависає зверху над валом, при цьому, якщо енкодери закріплені на одній стороні вертикальних стінок, перпендикулярних осі валу, то на іншій стороні тих же стінок закріплені обертові ролики так, що вал розташовується поміж дисками енкодерів і роликами, які контактують з ним, на інших вертикальних стінках рамки, паралельних осі валу, закріплені вертикальні стержні, які виконують роль упорів. Вертикальні стержні виконані у вигляді регульованих по довжині, наприклад, телескопічно з'єднаних трубок з елементами їх взаємної фіксації. Виходи лічильників імпульсів енкодерів підключені до пристрою, який відображає різність їх показань. Корисна модель пояснюється кресленнями, де на Фіг. 1 схематично зображено пристрій при горизонтальному розташуванні осі вала; на Фіг. 2 - вид по стрілці А на Фіг. 1; на Фіг. 3 - блоксхема системи фіксації різниці показань двох енкодерів. Пристрій містить два однакових енкодери 1 з лічильниками імпульсів 2. Енкодери 1 закріплені на вертикальних стінках 3 замкнутої прямокутної рамки 4. На валах енкодерів встановлені мірні диски 5 з діаметром d. Енкодери 1 закріплені на одній стороні вертикальних стінок 3, які розташовані перпендикулярне осі валу 5. На другій стороні тих же стінок 3, нависаючих над валом 6, закріплені обертові ролики 7, при цьому вал 6 виявляється розташованим поміж мірними дисками 5 і роликами 7 та контактує з ними. На інших вертикальних стінках 8, паралельних осі вала 6, закріплені вертикальні стержні 9, які виконують роль упорів. Стержні 9 виконані у вигляді регульованих по довжині, наприклад, телескопічно з'єднаних трубок 10 з елементами їх взаємної фіксації 11. Стержні 9 упираються в підставу 12 промислової установки. Виходи лічильників імпульсів 2 під'єднані до пристрою 13, який здійснює віднімання імпульсів n1 та n2. Пристрій 13 закріплено на одній з вертикальних стінок 8, найбільш зручних для візуального контролю показань. Пристрій працює наступним чином. Зібраний пристрій встановлюється зверху на вал 6, при цьому з ним контактують диски енкодерів 5 та ролики 7. Стержні 9 регулюються по довжині так, щоб вони упиралися в підставу 12 промислової установки. Для цього висувається телескопічна грубка 10 та фіксується елементом 11. При обертанні вала 6 за рахунок фрикційного контакту обертаються диски енкодерів 5 та ролики 7. Обертові енкодери 1 виробляють імпульси, кількість яких пропорціональна куту повороту енкодерів. Якщо вал 6 не навантажений крутним моментом, то обидва енкодери обертаються синхронно і лічильники імпульсів відображують однакові значення (n1=n2). Відповідно до закону Гука [6] при крученні стержнів круглого перерізу, крутний момент М, що виникає по довжині вала, можна розрахувати за кутом його закручування D * G * Jp M ,H * м l ; де l - довжина вала, м; G - модуль зсуву матеріалу, з якого виготовлений вал, Па; Jp 4 - полярний момент інерції поперечного перерізу вала, м ; D - кут відносного скручування двох перерізів вала на відстані l один відносно одного, радіан. Якщо вал 6 повертається на кут μο, то мірні диски 5 енкодерів повертаються на кут D d D * d, де D - діаметр вала, нз якому вимірюється крутний момент; d - діаметр мірного диска. Тоді різниця кутів повороту двох енкодерів складе величину d d1 d2 K * n1 n2 , де n1 , n2 - кількість імпульсів від першого і другого енкодерів відповідно; d1 , d2 - кути повороту мірних дисків першого та другого енкодерів відповідно; K - коефіцієнт пропорційності, радіан/імпульс. 50 Коефіцієнт K може бути визначений за формулою де Z - число імпульсів на один оборот енкодера. 2 K 360 2 радиан Z , UA 122975 U 2 0,00025 рад імпульс 25000 Наприклад, якщо Z 25000, то . Для підвищення точності вимірюванні доцільно вибирати енкодери з максимально можливим значенням Z . Тоді експериментальне значення крутного моменту, зафіксоване за допомогою пропонованого пристрою, може бути визначено за формулою K * n1 n2 * G * Jp d Me * l D. На Фіг. 3 показана блок-схема системи фіксації різниці показань двох енкодерів. На входи енкодерів 1 подається кут обертання d , який перетворюється лічильником імпульсів в K 5 відповідне число імпульсів n1 , n2 . Виходи лічильників імпульсів під'єднані до пристрою 13, який здійснює віднімання імпульсів n1 n2 . При ідеально точному виготовленні і монтажі пристрою і 10 відсутності навантажувального моменту n1 n2 0 . У реальності буде спостерігатися якесь значення n1 n2 0 . Це значення для обертового вала при відсутності крутного моменту буде постійним за величиною. При навантаженні валу моментом ця різниця буде змінюватися (збільшуватися) за рахунок появи d . Величина 15 20 25 30 35 крутного моменту буде пропорційна різниці значень n1 n2 , зафіксованих при роботі на холостому ходу і під навантаженням. Запропонований пристрій дозволяє зробити експериментальне визначення крутного моменту на будь-яких працюючих натурних промислових установках, якщо забезпечено вільний доступ до валу, який обертається і має відкриту циліндричну ділянку. При цьому не потрібна попередня робота з валом (крім знежирення). Джерело інформації: 1. Измерение крутящего момента на вращающихся валах [Електронний ресурс] - Режим доступу: http:/ivdon.ru/magazine/archive/n2y2012/798 - Заголовок з екрану. 2. Приборы для измерения крутящего момента и мощности [Електронний ресурс] - Режим доступу: http:/www.electroengineer.ru/2012/01/blog-post 04.html - Заголовок з екрану - Рис. 2. 3. Приборы для измерения крутящего момента и мощности [Електронний ресурс] - Режим доступу: http:/www.electroengineer.ru/2012/01/blog-post_04.html - Заголовок з екрану - Рис. 4, 5. 4. Приборы для измерения крутящего момента и мощности [Електронний ресурс] - Режим доступу: http:/ www.electroengineer.ru/2012/01 /blog-post_04.html - Заголовок з екрану - Рис. 6. 5. Ойматова К.Г., Руденко В.И., Бедарев С.А. Применение энкодеров для определения крутящих моментов в валах металлургических машин /Автоматизація технологічних об'єктів та процесів. Пошук молодих. Збірник наукових праць XII науково-технічної конференції аспірантів та студентів в м. Донецьку 17-20 квітня 2012 р. - Донецьк, ДонНТУ, 2012. - С. 444-446. [Електронний ресурс] - Режим доступу: http:/http:/ea.donntu.org/handle/123456789/21533 Заголовок з екрану - Прототип. 6. Ицкович Г.М., Винокуров А.И., Минин Л.С. Руководство к решению задач по сопротивлению материалов. - Росвузиздат. 1963 - С. 59, формула (4-8 г). ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 1. Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок, що включає два ідентичних інкрементальних енкодера з лічильниками імпульсів, які розташовані на однаковій відстані від осі вала і паралельно їй, рознесені по довжині і мають кінематичний зв'язок з перерізами вала на кінцях циліндричної ділянки з постійними розмірами поперечного перерізу, що забезпечує синхронне обертання енкодерів, який відрізняється тим, що на валах енкодерів встановлені мірні диски, а самі енкодери закріплені на вертикальних стінках замкненої прямокутної рамки, яка нависає зверху над валом, при цьому якщо енкодери закріплені на одній стороні вертикальних стінок, перпендикулярних осі вала, то на іншій стороні тих же стінок закріплені обертові ролики так, що вал розташовується поміж дисками енкодерів і роликами, що контактують з ним, на інших вертикальних стінках рамки, паралельних осі вала, закріплені вертикальні стержні, які виконують роль упорів. 2. Пристрій за п. 1, який відрізняється тим, що вертикальні стержні виконані у вигляді регульованих по довжині, наприклад, телескопічно з'єднаних трубок з елементами їх взаємної фіксації. 3 UA 122975 U 3. Пристрій за п. 1, який відрізняється тим, що виходи лічильників імпульсів енкодерів підключені до пристрою, який відображає різність їх показань. 4 UA 122975 U Комп’ютерна верстка А. Крижанівський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: установок, обертових, пристрій, вимірювання, промислових, натурних, моменту, крутного, валах
Код посилання
<a href="https://ua.patents.su/7-122975-pristrijj-dlya-vimiryuvannya-krutnogo-momentu-na-obertovikh-valakh-naturnikh-promislovikh-ustanovok.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок</a>
Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок
Номер патенту: 118805
Опубліковано: 28.08.2017
Автори: Дудніков Володимир Степанович, Потірай Ростислав Тарасович
Мітки: моменту, вимірювання, крутного, обертових, промислових, натурних, валах, установок, пристрій
Формула / Реферат:
1. Пристрій для вимірювання крутного моменту на обертових валах натурних промислових установок, що включає два ідентичних інкрементальних енкодера з лічильниками імпульсів, які розташовані на однаковій відстані від осі вала і паралельно їй рознесені по довжині і мають кінематичний зв'язок з перетинами вала на кінцях циліндричної ділянки з постійними розмірами поперечного перерізу, що забезпечує синхронне обертання енкодерів, який...
Пристрій для вимірювання крутного моменту
Номер патенту: 86665
Опубліковано: 10.01.2014
Автори: Золотенко Елла Олександрівна, Михайловський Юрій Броніславович, Волошин Михайло Васильович
МПК: G01L 5/24
Мітки: крутного, пристрій, моменту, вимірювання
Формула / Реферат:
Пристрій для вимірювання крутного моменту, що складається з корпусу, елементів з'єднання двигуна, датчиків, який відрізняється тим, що муфта має пази виконані під кутом, за рахунок чого крутне зусилля розкладається на радіальне зусилля та осьове, що передається на датчики, які встановлені між корпусом та підшипниками.
Пристрій для вимірювання крутного моменту електричної машини
Номер патенту: 93902
Опубліковано: 27.10.2014
Автори: Колісниченко Олексій Володимирович, Колот Олександр Володимирович
МПК: G01L 3/00
Мітки: електричної, машини, пристрій, крутного, вимірювання, моменту
Формула / Реферат:
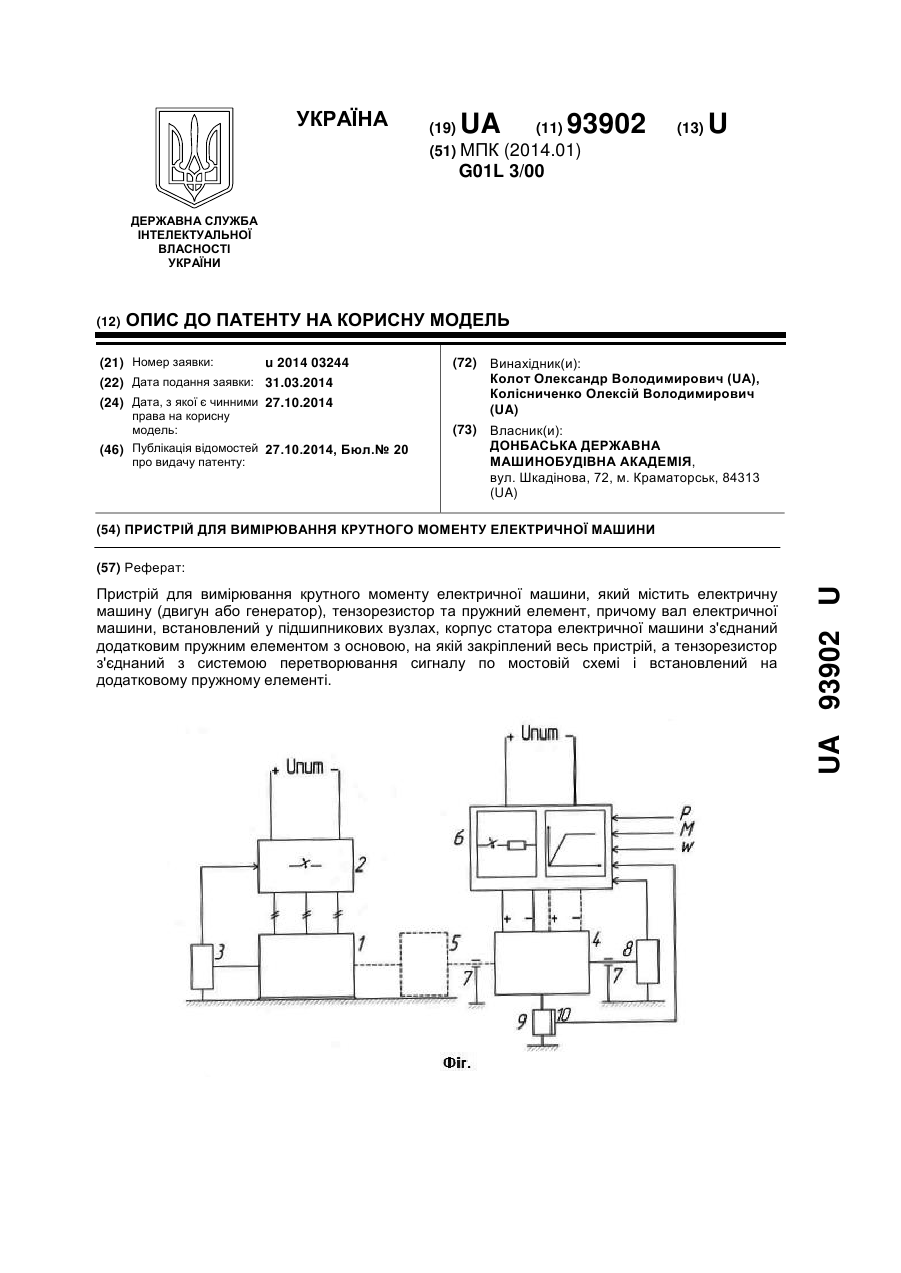
Пристрій для вимірювання крутного моменту електричної машини, який містить електричну машину (двигун або генератор), тензорезистор та пружній елемент, який відрізняється тим, що вал електричної машини, встановлений у підшипникових вузлах, корпус статора електричної машини з'єднаний додатковим пружним елементом з основою, на якій закріплений весь пристрій, а тензорезистор з'єднаний з системою перетворювання сигналу по мостовій схемі і...
Пристрій для вимірювання величини крутного моменту
Номер патенту: 52275
Опубліковано: 16.12.2002
Автори: Комар Роман Васильович, Лясота Оксана Михайлівна, Гупка Богдан Васильович, Білик Стефанія Григорівна, Гурик Олег Ярославович
Мітки: крутного, вимірювання, величини, моменту, пристрій
Формула / Реферат:
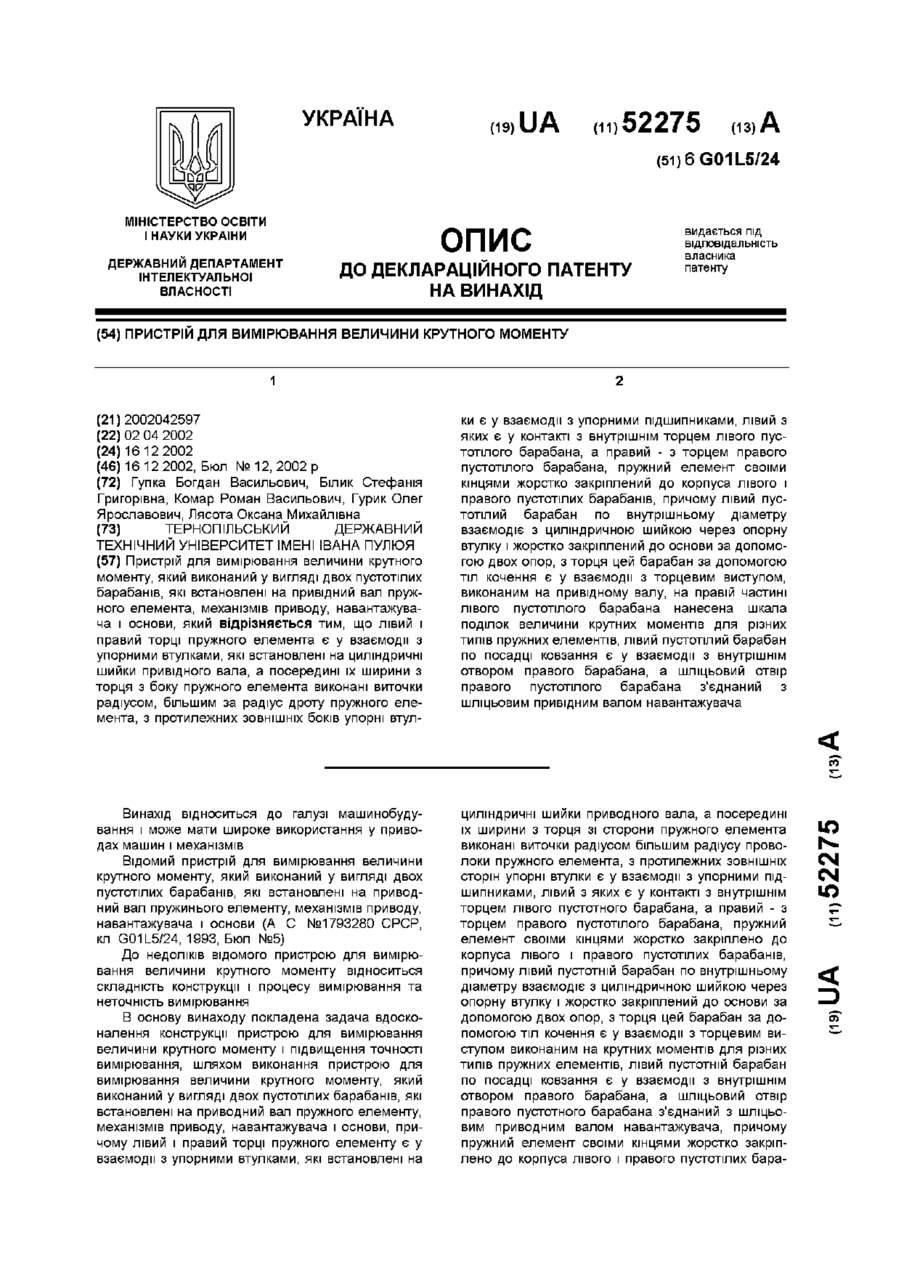
Пристрій для вимірювання величини крутного моменту, який виконаний у вигляді двох пустотілих барабанів, які встановлені на привідний вал пружного елемента, механізмів приводу, навантажувача і основи, який відрізняється тим, що лівий і правий торці пружного елемента є у взаємодії з упорними втулками, які встановлені на циліндричні шийки привідного вала, а посередині їх ширини з торця з боку пружного елемента виконані виточки радіусом, більшим...
Пристрій для вимірювання кутової швидкості, крутного моменту та механічної потужності
Номер патенту: 83475
Опубліковано: 25.07.2008
Автор: Грабар Іван Григорович
МПК: G01R 21/133, G01P 3/64, G01L 3/04
Мітки: крутного, швидкості, моменту, механічної, кутової, потужності, пристрій, вимірювання
Формула / Реферат:
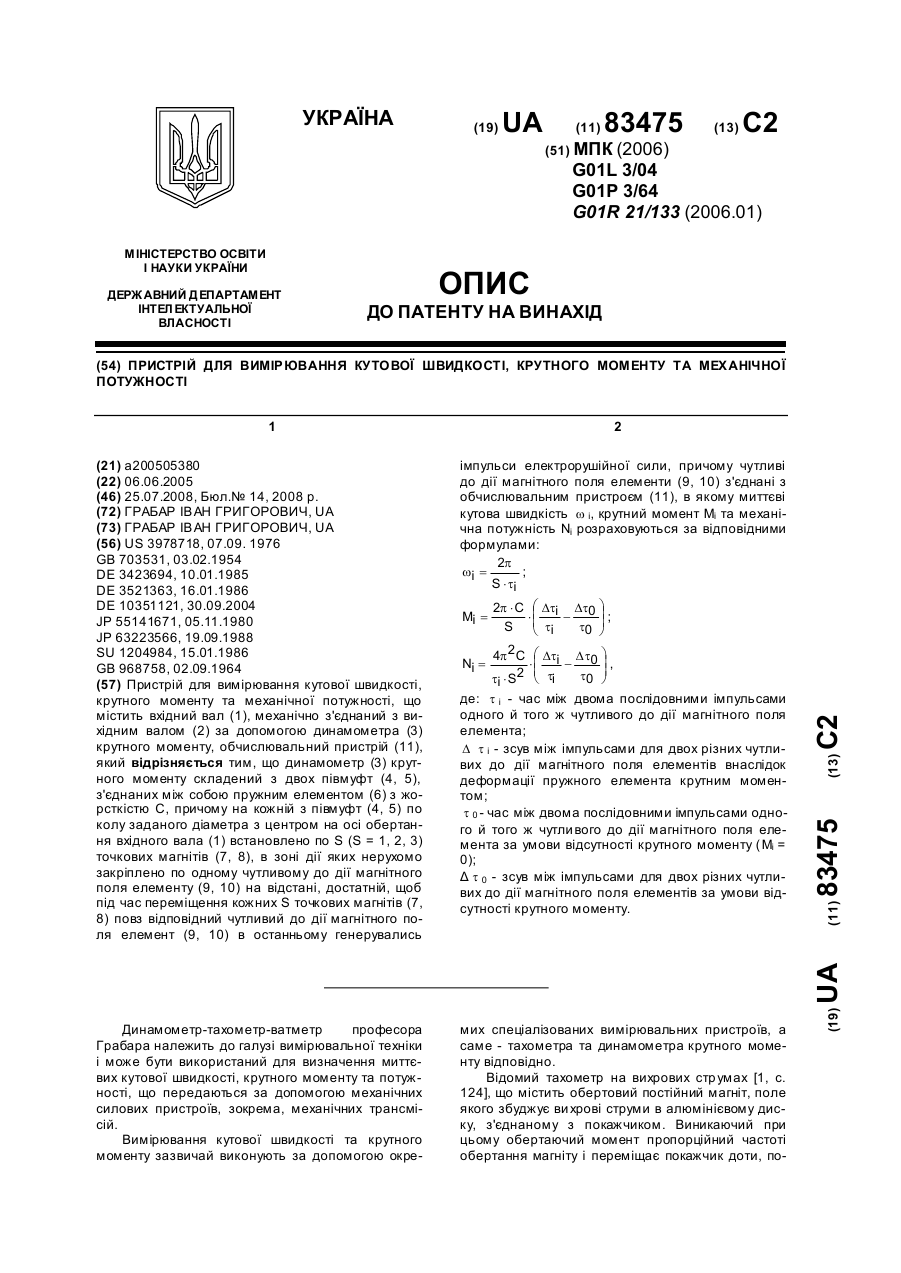
Пристрій для вимірювання кутової швидкості, крутного моменту та механічної потужності, що містить вхідний вал (1), механічно з'єднаний з вихідним валом (2) за допомогою динамометра (3) крутного моменту, обчислювальний пристрій (11), який відрізняється тим, що динамометр (3) крутного моменту складений з двох півмуфт (4, 5), з'єднаних між собою пружним елементом (6) з жорсткістю С, причому на кожній з півмуфт (4, 5) по колу заданого діаметра з...
Попередній патент: Установка для електрогідравлічного штампування
Наступний патент: Пристрій для монтажу робочих органів
Випадковий патент: Мікрокапсула, яка містить суспензію твердої біологічно активної сполуки, і спосіб її одержання