Машина для виймання і укладання пляшок в тару
Номер патенту: 2017
Опубліковано: 20.12.1994
Автори: Костінський Іван Захарович, Черняк Олександр Лазаревич
Формула / Реферат
1. Машина для извлечения и укладки бутылок в тару, содержащая механизм перемещения тары, захватную головку для бутылок, укрепленную на каретке, смонтированной с возможностью перемещения по криволинейной траектории посредством опорных элементов, один из который выполнен в виде втулок для перемещения по спаренным горизонтальной и вертикальной направляющим, и механизм привода, отличающаяся тем, что горизонтальная направляющая снабжена роликами качения, опорные элементы на стороне каретки, противоположной расположению втулок, выполнены в виде роликов, каретка снабжена противовесом для его уравновешивания, а механизм привода включает шестерню, входящий в зацепление с ней зубчатый сектор и редуктор.
2. Машина по п. 1, отличающаяся тем, что шестерня механизма привода соединена кривошипно-шатунным механизмом с кареткой, а зубчатый сектор соединен посредством тяги с кривошипом, установленным на выходном валу редуктора механизма привода.
Текст
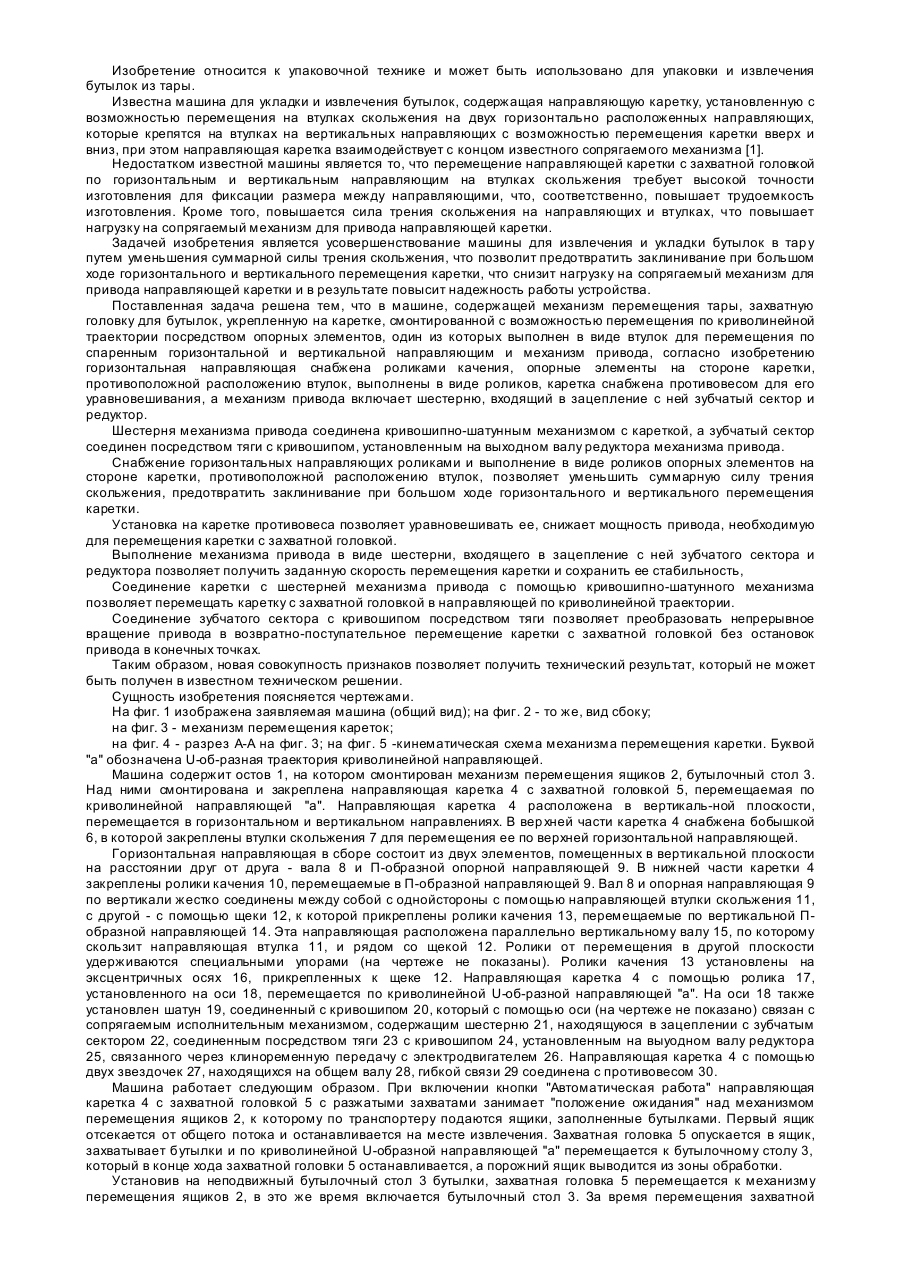
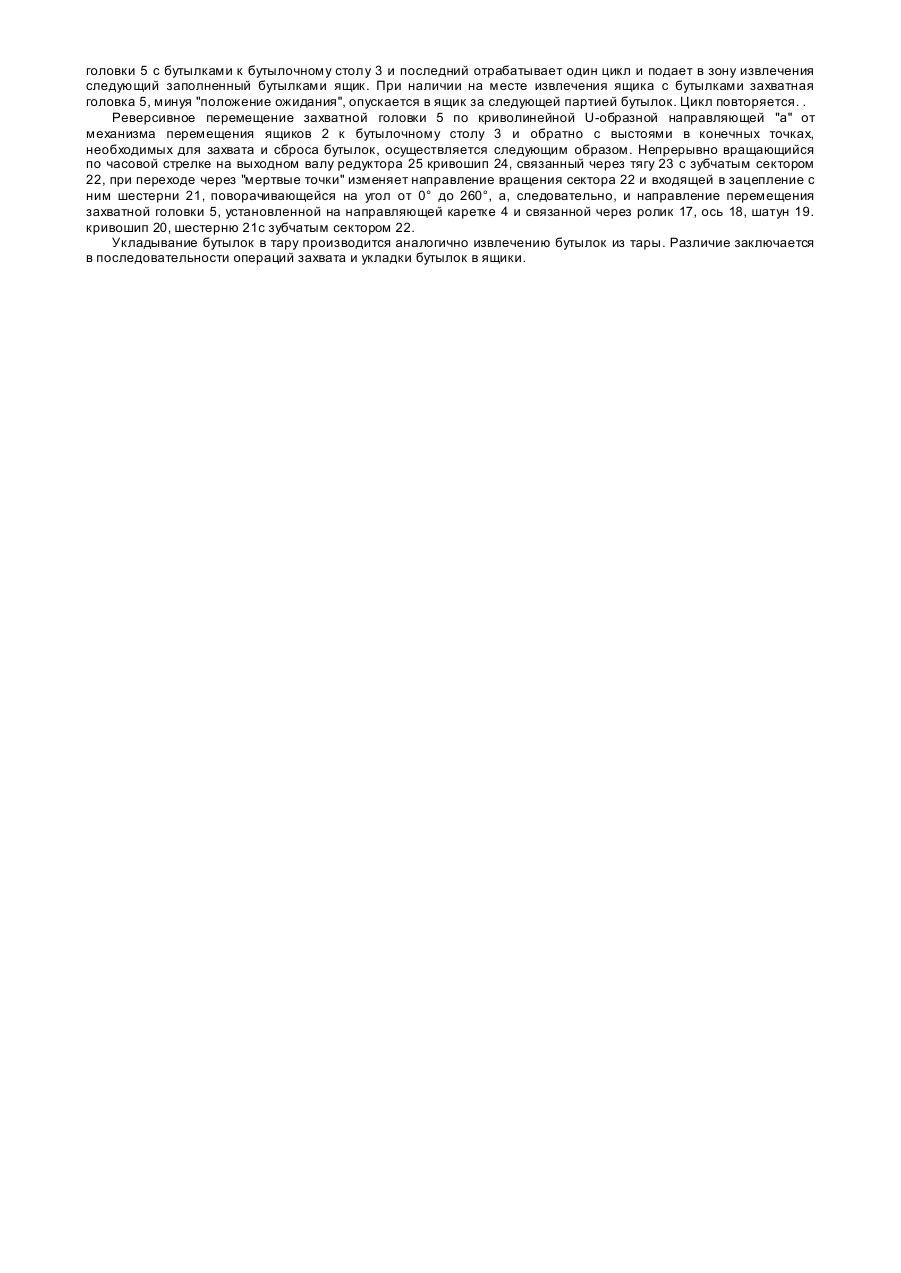
Изобретение относится к упаковочной технике и может быть использовано для упаковки и извлечения бутылок из тары. Известна машина для укладки и извлечения бутылок, содержащая направляющую каретку, установленную с возможностью перемещения на втулках скольжения на двух горизонтально расположенных направляющих, которые крепятся на втулках на вертикальных направляющих с возможностью перемещения каретки вверх и вниз, при этом направляющая каретка взаимодействует с концом известного сопрягаемого механизма [1]. Недостатком известной машины является то, что перемещение направляющей каретки с захватной головкой по горизонтальным и вертикальным направляющим на втулках скольжения требует высокой точности изготовления для фиксации размера между направляющими, что, соответственно, повышает трудоемкость изготовления. Кроме того, повышается сила трения скольжения на направляющих и втулках, что повышает нагрузку на сопрягаемый механизм для привода направляющей каретки. Задачей изобретения является усовершенствование машины для извлечения и укладки бутылок в тар у путем уменьшения суммарной силы трения скольжения, что позволит предотвратить заклинивание при большом ходе горизонтального и вертикального перемещения каретки, что снизит нагрузку на сопрягаемый механизм для привода направляющей каретки и в результате повысит надежность работы устройства. Поставленная задача решена тем, что в машине, содержащей механизм перемещения тары, захватную головку для бутылок, укрепленную на каретке, смонтированной с возможностью перемещения по криволинейной траектории посредством опорных элементов, один из которых выполнен в виде втулок для перемещения по спаренным горизонтальной и вертикальной направляющим и механизм привода, согласно изобретению горизонтальная направляющая снабжена роликами качения, опорные элементы на стороне каретки, противоположной расположению втулок, выполнены в виде роликов, каретка снабжена противовесом для его уравновешивания, а механизм привода включает шестерню, входящий в зацепление с ней зубчатый сектор и редуктор. Шестерня механизма привода соединена кривошипно-шатунным механизмом с кареткой, а зубчатый сектор соединен посредством тяги с кривошипом, установленным на выходном валу редуктора механизма привода. Снабжение горизонтальных направляющих роликами и выполнение в виде роликов опорных элементов на стороне каретки, противоположной расположению втулок, позволяет уменьшить суммарную силу трения скольжения, предотвратить заклинивание при большом ходе горизонтального и вертикального перемещения каретки. Установка на каретке противовеса позволяет уравновешивать ее, снижает мощность привода, необходимую для перемещения каретки с захватной головкой. Выполнение механизма привода в виде шестерни, входящего в зацепление с ней зубчатого сектора и редуктора позволяет получить заданную скорость перемещения каретки и сохранить ее стабильность, Соединение каретки с шестерней механизма привода с помощью кривошипно-шатунного механизма позволяет перемещать каретку с захватной головкой в направляющей по криволинейной траектории. Соединение зубчатого сектора с кривошипом посредством тяги позволяет преобразовать непрерывное вращение привода в возвратно-поступательное перемещение каретки с захватной головкой без остановок привода в конечных точках. Таким образом, новая совокупность признаков позволяет получить технический результат, который не может быть получен в известном техническом решении. Сущность изобретения поясняется чертежами. На фиг. 1 изображена заявляемая машина (общий вид); на фиг. 2 - то же, вид сбоку; на фиг. 3 - механизм перемещения кареток; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 -кинематическая схема механизма перемещения каретки. Буквой "а" обозначена U-об-разная траектория криволинейной направляющей. Машина содержит остов 1, на котором смонтирован механизм перемещения ящиков 2, бутылочный стол 3. Над ними смонтирована и закреплена направляющая каретка 4 с захватной головкой 5, перемещаемая по криволинейной направляющей "а". Направляющая каретка 4 расположена в вертикаль-ной плоскости, перемещается в горизонтальном и вертикальном направлениях. В вер хней части каретка 4 снабжена бобышкой 6, в которой закреплены втулки скольжения 7 для перемещения ее по верхней горизонтальной направляющей. Горизонтальная направляющая в сборе состоит из двух элементов, помещенных в вертикальной плоскости на расстоянии друг от друга - вала 8 и П-образной опорной направляющей 9. В нижней части каретки 4 закреплены ролики качения 10, перемещаемые в П-образной направляющей 9. Вал 8 и опорная направляющая 9 по вертикали жестко соединены между собой с однойстороны с помощью направляющей втулки скольжения 11, с другой - с помощью щеки 12, к которой прикреплены ролики качения 13, перемещаемые по вертикальной Побразной направляющей 14. Эта направляющая расположена параллельно вертикальному валу 15, по которому скользит направляющая втулка 11, и рядом со щекой 12. Ролики от перемещения в другой плоскости удерживаются специальными упорами (на чертеже не показаны). Ролики качения 13 установлены на эксцентричных осях 16, прикрепленных к щеке 12. Направляющая каретка 4 с помощью ролика 17, установленного на оси 18, перемещается по криволинейной U-об-разной направляющей "а". На оси 18 также установлен шатун 19, соединенный с кривошипом 20, который с помощью оси (на чертеже не показано) связан с сопрягаемым исполнительным механизмом, содержащим шестерню 21, находящуюся в зацеплении с зубчатым сектором 22, соединенным посредством тяги 23 с кривошипом 24, установленным на выуодном валу редуктора 25, связанного через клиноременную передачу с электродвигателем 26. Направляющая каретка 4 с помощью двух звездочек 27, находящихся на общем валу 28, гибкой связи 29 соединена с противовесом 30. Машина работает следующим образом. При включении кнопки "Автоматическая работа" направляющая каретка 4 с захватной головкой 5 с разжатыми захватами занимает "положение ожидания" над механизмом перемещения ящиков 2, к которому по транспортеру подаются ящики, заполненные бутылками. Первый ящик отсекается от общего потока и останавливается на месте извлечения. Захватная головка 5 опускается в ящик, захватывает бутылки и по криволинейной U-образной направляющей "а" перемещается к бутылочному столу 3, который в конце хода захватной головки 5 останавливается, а порожний ящик выводится из зоны обработки. Установив на неподвижный бутылочный стол 3 бутылки, захватная головка 5 перемещается к механизму перемещения ящиков 2, в это же время включается бутылочный стол 3. За время перемещения захватной головки 5 с бутылками к бутылочному столу 3 и последний отрабатывает один цикл и подает в зону извлечения следующий заполненный бутылками ящик. При наличии на месте извлечения ящика с бутылками захватная головка 5, минуя "положение ожидания", опускается в ящик за следующей партией бутылок. Цикл повторяется. . Реверсивное перемещение захватной головки 5 по криволинейной U-образной направляющей "а" от механизма перемещения ящиков 2 к бутылочному столу 3 и обратно с выстоями в конечных точках, необходимых для захвата и сброса бутылок, осуществляется следующим образом. Непрерывно вращающийся по часовой стрелке на выходном валу редуктора 25 кривошип 24, связанный через тягу 23 с зубчатым сектором 22, при переходе через "мертвые точки" изменяет направление вращения сектора 22 и входящей в зацепление с ним шестерни 21, поворачивающейся на угол от 0° до 260°, а, следовательно, и направление перемещения захватной головки 5, установленной на направляющей каретке 4 и связанной через ролик 17, ось 18, шатун 19. кривошип 20, шестерню 21с зубчатым сектором 22. Укладывание бутылок в тару производится аналогично извлечению бутылок из тары. Различие заключается в последовательности операций захвата и укладки бутылок в ящики.
ДивитисяДодаткова інформація
Назва патенту англійськоюMachine for extraction and arrangement of bottles in the container
Автори англійськоюKostinskyi Ivan Zakharovych, Cherniak Oleksandr Lazarevych
Назва патенту російськоюМашина для извлечения и укладки бутылок в тару
Автори російськоюКостинский Иван Захарович, Черняк Александр Лазаревич
МПК / Мітки
МПК: B65B 21/00
Мітки: пляшок, машина, укладання, виймання, тару
Код посилання
<a href="https://ua.patents.su/7-2017-mashina-dlya-vijjmannya-i-ukladannya-plyashok-v-taru.html" target="_blank" rel="follow" title="База патентів України">Машина для виймання і укладання пляшок в тару</a>
Машина для контактного стикового зварювання труб
Номер патенту: 398
Опубліковано: 30.04.1993
Автори: Патон Борис Євгенович, Сахарнов Василь Олексійович, Кучук-Яценко Сергій Іванович, Лебедєв Володимир Костянтинович, Галян Борис Опанасович, Мірошниченко Олександр Петрович
МПК: B23K 31/02, B23K 11/04
Мітки: стикового, зварювання, контактного, труб, машина
Формула / Реферат:
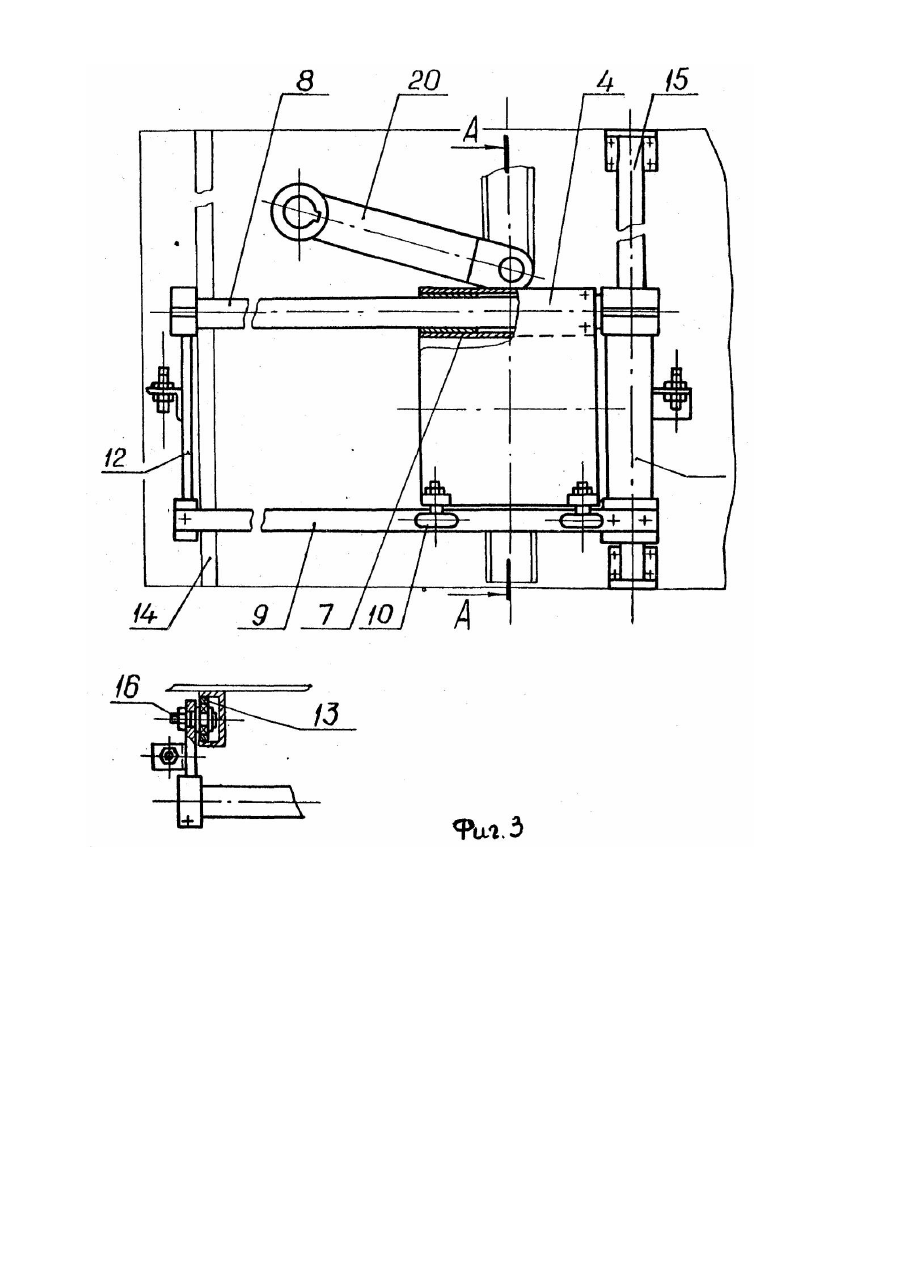
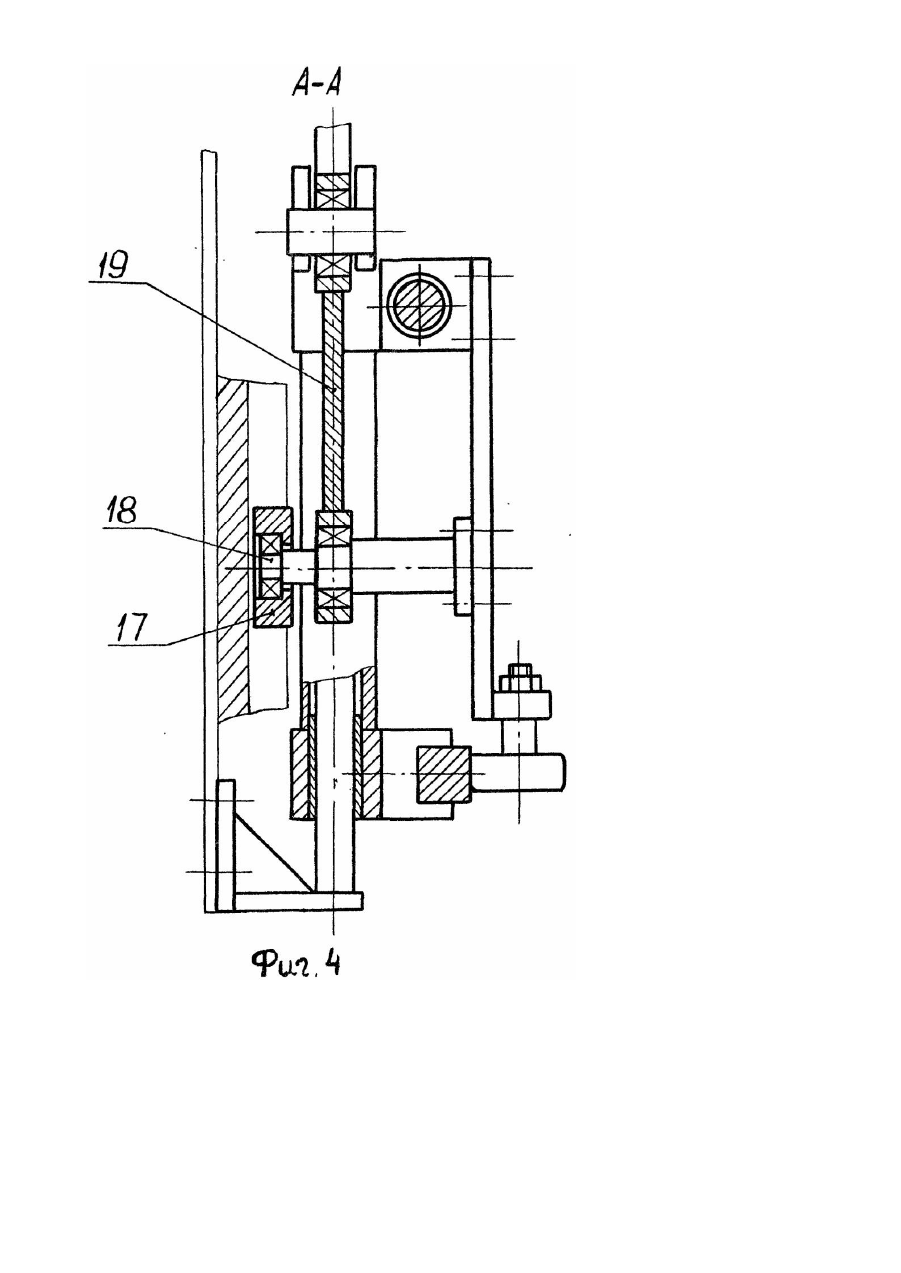
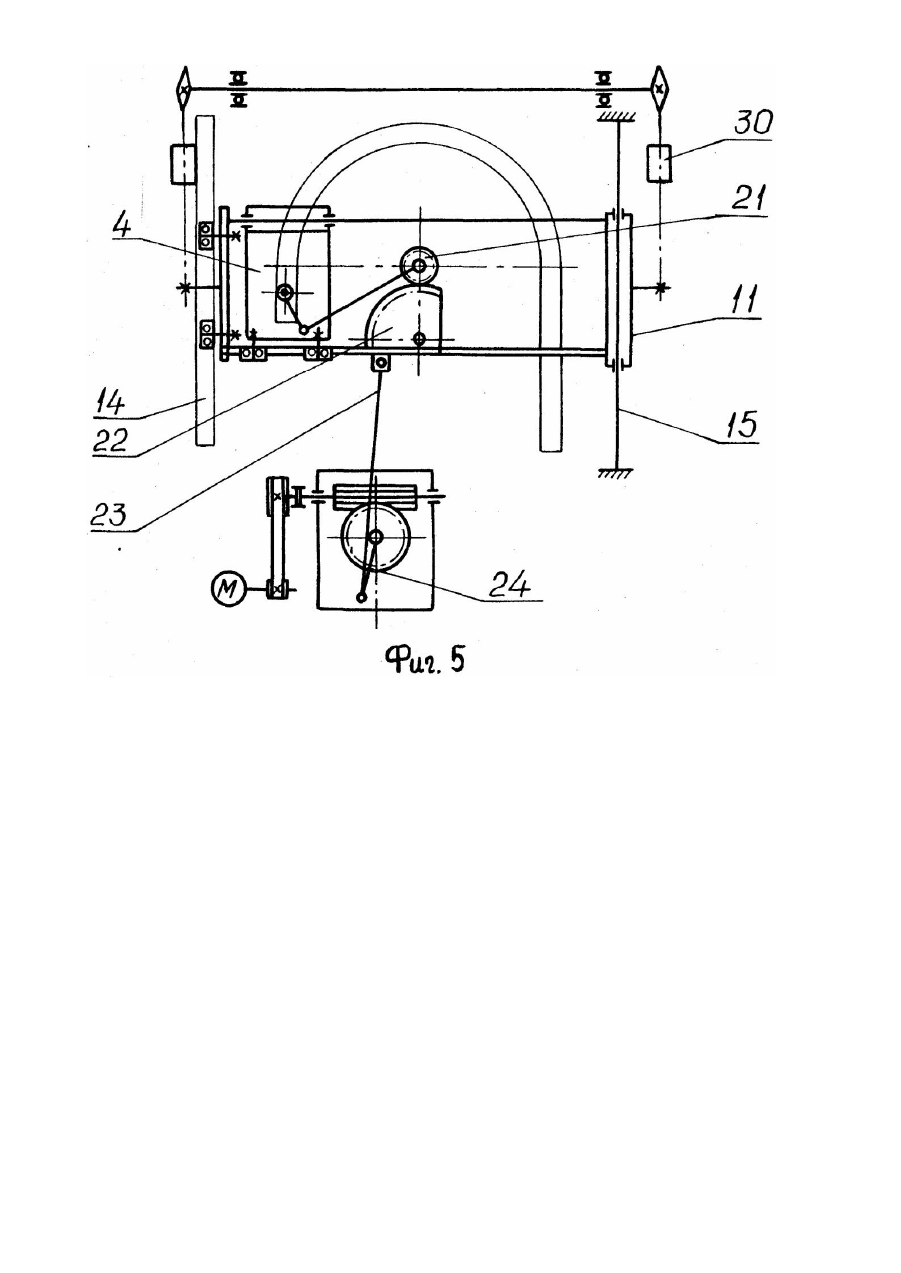
Формула изобретенияМашина для контаткной стыковой сварки труб, содержащая центральную штангу, смонтированные на ней с возможностью радиального перемещения разжимные элементы механизмы их разжатия и привод оплавления и осадки, отличающаяся тем, что, с целью улучшения условий центрирования и сварки труб с большим допуском на диаметр и конусность, разжимные элементы выполнены в виде рычагов, имеющих на концах скосы, а механизм разжатия...
Машина тамподруку
Номер патенту: 235
Опубліковано: 30.04.1993
Автори: Данилецький Юрій Михайлович, Петрук Анатолій Іванович, Яніцький Віталій Генріхович
МПК: B41F 17/00
Мітки: тамподруку, машина
Формула / Реферат:
(57) МАШИНА ТАМПОПЕЧАТИ, содержащая станину со столом для запечатываемого изделия и с красочным аппаратом и установленный перпендикулярно к столу приводной вал с закрепленным на нем с возможностью перемещения вдоль его оси носителем тампонов, кинематически связанным с механизмом натиска, отличающаяся тем, что, с целью повышения надежности в работе машины путем гашения крутильных колебаний, она имеет средство фиксации носителя тампонов...
Машина для виготування розеток

Номер патенту: 1938
Опубліковано: 20.12.1994
Автори: Подгорнов Олександр Ефимович, Леущенко Іван Тимофійович, Степанюк Анатолій Іванович
МПК: B31B 45/00, B31D 3/00
Мітки: розеток, виготування, машина
Формула / Реферат:
1. Машина для изготовления розеток, включающая блок бобин с парафинированной бумагой, связанные с приводом транспортно-подающий механизм, отрезной механизм с резаком и формовочный механизм, содержащий подпружиненный пуансон, зубчатую матрицу и выталкиватель, отличающаяся тем, что, с целью повышения качества розеток и надежности работы машины, транспортно-подающий механизм выполнен из установленного на направляющей с возможностью...
Машина для контактного стикового зварювання труб
Номер патенту: 736
Опубліковано: 15.12.1993
Автори: Сахарнов Василь Олексійович, Лебедєв Володимир Костянтинович, Галян Борис Опанасович, Кучук-Яценко Сергій Іванович, Патон Борис Євгенович
МПК: B23K 11/04
Мітки: машина, стикового, контактного, зварювання, труб
Формула / Реферат:
Машина для контактной стыковой сварки труб, содержащая центральную полую штангу, на которой смонтированы подвижный и неподвижный опорные диски механизмов для зажима свариваемых труб, выполненных в виде силовых цилиндров, взаимодействующих посредством распорных элементов и серег с центрирующими рычагами, и привод оплавлення и осадки, связанный с подвижным опорным диском, отличающаяся тем, что, с целью повышения надежности конструкции путем...
Гичкозбиральна машина

Номер патенту: 520
Опубліковано: 30.04.1993
Автори: Козіброда Ярослав Іванович, Гевко Богдан Матвійович, Копак Мирослав Петрович, Осуховський Володимир Михайлович, Данильченко Михайло Григорович, Гевко Роман Богданович, Безпальок Андрій Петрович, Рогатинський Роман Михайлович
МПК: A01D 23/02
Мітки: машина, гичкозбиральна
Формула / Реферат:
Формула изобретенияБотвоуборочная машина, содержащая раму, опорные колеса, ботвосрезающие устройства, выполненные в виде вертикально установленных многозаходных шнеков, щиток, выгрузной транспортер и ботвошвыряльный механизм, отличающаяся тем, что, с целью уменьшения габаритных размеров и повышения качества транспортировки, шнеки выполнены конусной формы, минимальные диаметры которых размещены в зоне обработки материалов, причем в зоне...
Попередній патент: Спосіб очищення каналів деталей
Наступний патент: Пристрій для виймання і укладання пляшок в тару
Випадковий патент: Спосіб багатостадійного подрібнення в барабанних млинах