Ультразвуковий частотно-часовий витратомір
Номер патенту: 20196
Опубліковано: 15.06.2001
Автори: Романов Анатолій Філіпповіч, Шєстаков Лєонід Владіміровіч, Мухарскій Алєксандр Матвєєвіч
Формула / Реферат
Ультразвуковой частотно-временной расходомер, содержащий два приемоизлучающих преобразователя, входы/выходы которых через первый коммутатор соединены с последовательно соединенными усилителем, амплитудным селектором и временным селектором, а через второй коммутатор - с формирователем зондирующего сигнала, вход которого соединен с первым выходом распределителя тактов, второй выход которого соединен с управляющими входами первого, второго и третьего коммутаторов и распределителя сигнала подстройки, третий выход - со вторым управляющим входом распределителя сигнала подстройки и первым входом вычислительного устройства, а четвертый выход - с первым входом делителя частоты, второй вход которого соединен с выходом третьего коммутатора и входом распределителя тактов, а выход - со вторым входом временного селектора, выход которого соединен с третьим входом распределителя сигнала подстройки, четвертый вход которого соединен с выходом формирователя сигнала величины подстройки, а первый и второй выходы соединены со входами соответственно первой и второй схем управления, а также первый и второй генераторы, выходы которых соединены со входами третьего коммутатора и измерителя разности, выход которого соединен со вторым входом вычислительного устройства, отличающийся тем, что он содержит третью и четвертую схемы управления, четвертый и пятый коммутаторы, регистр знака подстройки, схему совпадения и блок регистров сдвига, причем входы третьей и четвертой схем управления соединены соответственно с третьим и четвертым выходами распределителя сигнала подстройки, а выходы - со входами четвертого и пятого коммутаторов, вторые входы которых соединены с выходами соответственно первой и второй схем управления, а выходы соединены со входами первого и второго управляемых генераторов, а кроме того первый выход регистра знака подстройки соединен с выходом временного селектора и первым входом схемы совпадения, второй вход - с выходом формирователя сигнала величины подстройки, выход регистра знака подстройки соединен со вторым входом схемы совпадения, выход которой соединен с первым входом блока регистров сдвига, второй вход которого соединен с пятым выходом распределителя тактов, а выход соединен со вторым входом формирователя сигнала величины подстройки.
Текст
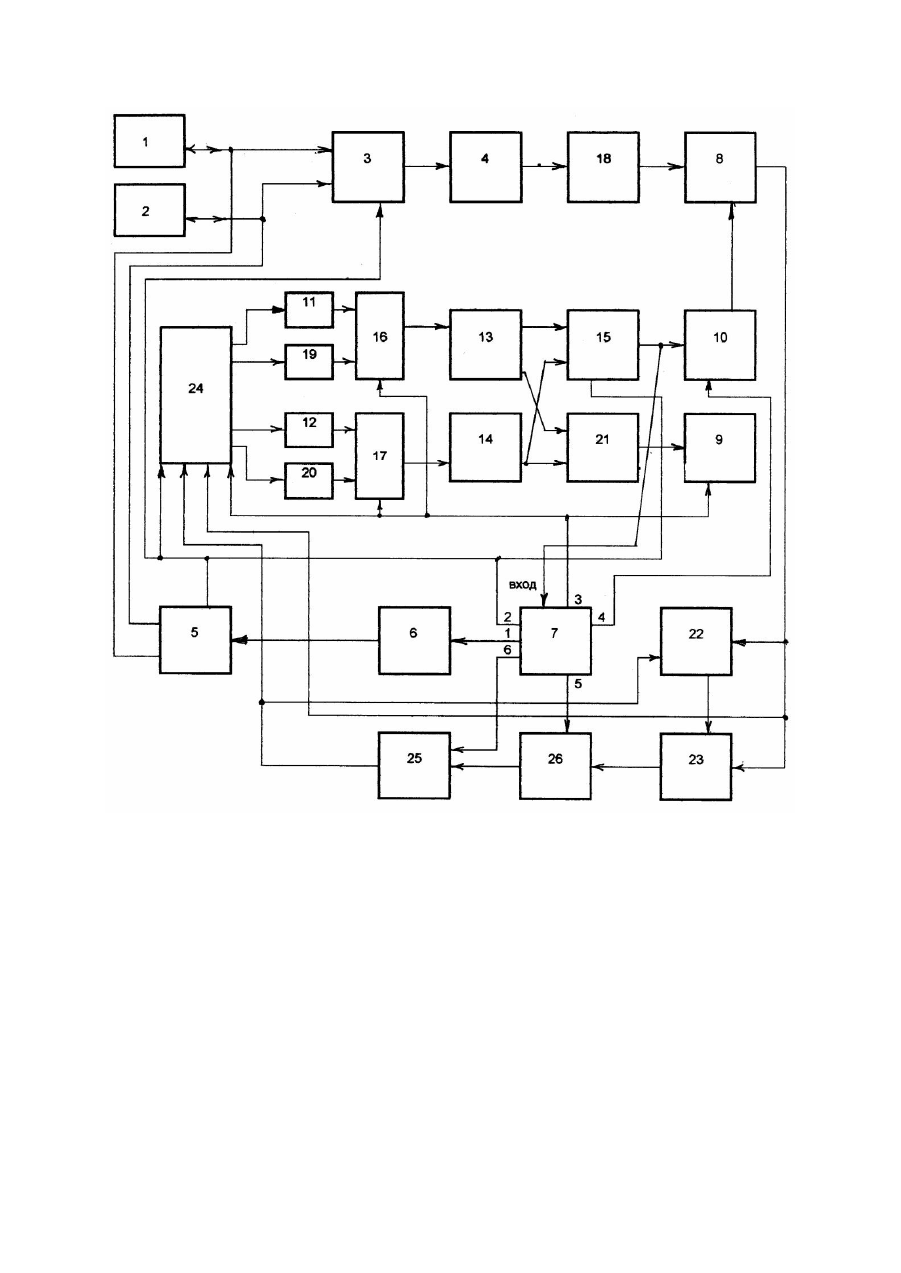
Изобретение относится к измерительной технике и может быть использовано для измерения расхо да жидких и газообразных сред. Известен ультразвуковой расхо домер, основанный на измерении разности временных интервалов при распространении ультразвука по потоку и против него. Измерение осуществляется с помощью высокостабильного генератора, дискретными импульсами которого заполняются измеряемые временные промежутки. Подсчитанная счетчиком разность импульсов является мерой расхо да [1]. Недостатком указанного расхо домера является невысокая точность измерений, которая ограничивается величиной единицы дискретного отсчета, т.е. периодом колебаний генератора. Известен ультразвуковой расхо домер, содержащий два управляемых по часто те генератора, выходами подсоединенных к входам первого коммутатора, а также последовательно включенные формирователь зондирующих импульсов, второй коммутатор, приемопередающие преобразователи акустического канала расхо домера, третий коммутатор, усилитель-формирователь и временной селектор, при этом вторые выходы управляемых генераторов связаны с измерителем разности частот [2]. Однако для указанного устройства характерна недостаточно высокая точность измерений, обусловленная тем, что известное устройство представляет собой по существу автоматическую систему непрерывного регулирования, имеющую значительную зону нечувствительности, а также невысокую оперативность измерений. Известен ультразвуковой расхо домер, содержащий два уп равляемых генератора, выходами подсоединенных к входам измерителя разности частот и первого коммутато ра, а также последовательно включенные формирователь зондирующи х импульсов, вто рой коммутатор, два приемопередающих преобразователя, третий коммутатор, усилитель-формирователь и временной селектор, в который дополнительно введены схема временного сравнения, два реверсивных счетчика, два цифроаналоговых преобразователя, а также последовательно включенные счетчик импульсов, синхронизатор и четвертый коммутатор, причем схема временного сравнения входами соединена с выходом временного селектора и с синхронизатором , а выходом - через четвертый коммутатор соединена с реверсивными счетчиками, которые через цифроаналоговые преобразователи подключены к входам управляемых генераторов. Вход счетчика импульсов связан с выходом первого коммутатора, а выходы синхронизатора подсоединены к временному селектору, к схеме временного сравнения, к каждому из четырех коммутаторов и формирователю зондирующих импульсов [3]. Однако и для указанного устройства точность измерений обусловлена тем, что автоматическая система непрерывного регули рования имеет значительную зону нечувствительности, а также невысокую оперативность измерений. Наиболее близким из известных является расходомер, реализующий частотно-временной принцип измерения, в котором имеются два уп равляемых генератора, каждый из которых уп равляется своим каналом "по потоку" и "против", включающим схе му установки коэффициента внутреннего умножения, временной селектор, реверсивный счетчик, схему уп равления частотой генератора. В каждом из двух каналов по и против потока устанавливается свой коэффи циент внутреннего умножения. Сигналы с генераторов поступают на четырехвходовое измерительное устройство, которое вычисляет величину расхода по определенному алго ритму и на вход которого поступают коды коэффициентов внутреннего умножения. Переключение блоков расхо домера на работу по и против потока осуществляется тактовым распределителем через коммутатор, который подает сигналы на ключи. Расходомер позволяет за счет установления различных коэффициентов внутреннего умножения в каналах по и против потока устранить явление "захвата" при измерении малых расходов [4]. Сдвиг частот осуществляется за счет выбора разных коэффи циентов деления частоты управляемых генераторов n1 и n2. Для уче та сдвига требуется дополнительная операция вычитания разностной частоты. Кроме того, перестройка осуществляется путем изменения кода реверсивного счетчика на единицу, что обеспечивает постоянную скорость перестройки при изменении скорости потока и не позволяет учесть ди намику изменения потока. В основу ре шаемой заявленным изобретением задачи заложено повышение точности измерений расхо да жидких и газообразных сред. Дости жение поставленной задачи осуществляется за счет то го, что со держащий два приемоизлучающи х преоб разователя, вхо ды/вы ходы которых че рез первый коммутатор соединены с последовательно соединенными усилителем, амплитудным селектором и временным селекто ром, а через второй коммутатор - с фор мирователем зондирующего сигнала, распределитель тактов, первый выход которо го соединен с вхо дом формирователя зондирующе го сигнала, вто рой выход которого соединен с уп равляющими вхо дами перво го, вто рого и третьего коммутато ров и распределителя сигнала подстройки, тре тий выход - со вто рым управляющим вхо дом распределителя сигнала подстройки и первым вхо дом вычислительного устройства, а четвертый выход - с первым входом делите ля часто ты, вто рой вход которо го соединен с выходом третьего коммутато ра и входом распределителя тактов, а выход - со вто рым входом временного се лекто ра, вы ход которого сое динен с третьим вхо дом распределителя сигнала подстройки, четвертый вход которого соединен с выходом формирователя сигнала величи ны подстройки, а первый и вто рой выходы соединены со входами соответственно первой и вто рой схем уп равления, а также первый и вто рой генераторы, вы ходы ко торых сое динены со вхо дами третьего коммутато ра и измерителя разности, вы ход которого сое динен со вто рым вхо дом вычислительного устройства, согласно изобретению он дополнительно содержит третью и четвертую схе мы управления, четвертый и пятый коммутато ры, регистр знака подстройки, схе му совпадения и блок регистров сдви га, причем вхо ды третьей и четвертой схем управления соединены соответственно с третьим и четвер тым выхода ми распределителя сигнала подстройки, а выхо ды - со вхо дами четвертого и пятого коммутато ров, вто рые вхо ды которых сое динены с выходами соответственно первой и вто рой схем управления, а выходы сое динены со вхо дами первого и вто рого управляемых генераторов, а кроме того, первый выход регистра знака подстройки соединен с выходом временного селектора и первым вхо дом схе мы совпадения, второй вход - с выходом формирователя сигнала величины подстройки, выход регистра знака подстройки соединен со вторым входом схемы совпадения, выход которой соединен с первым входом блока регистров сдвига, вто рой вход которого соединен с пятым выходом распределителя тактов, а выход соединен со вторым входом формирователя сигнала величины подстройки, первый вход которого соединен с шестым выходом распределителя тактов, кроме того, выхо д усили теля связан с вхо дом амплитудного селекто ра, выход которого сое динен с первым вхо дом временного се лекто ра. Согласно изобретению включены дополнительно третья и четвертая схемы управления, четвертый и пятый коммутаторы, регистр знака подстройки, схема совпадения, блок регистров сдвига и устройство переключения каналов, причем входы третьей и четвертой схем управления соединены соответственно с третьим и четвертым выходами распределителя сигнала подстройки, а выходы - с третьим и четвертым информационными входами четвертого и пятого коммутаторов, первые и вторые информационные вхо ды которых соединены с выходами соответственно первой и второй схем управления, первые управляющие входы соединены с выходом распределителя тактов, вто рые управляющие входы - с выходом вычислительного устройства, а выходы соединены со входами первого и второго управляемых генераторов, а кроме того, первый вход регистра знака подстройки соединен с выходом временного селектора и первым входом схемы совпадения, второй вход - с выходом формирователя сигнала величины подстройки, выход регистра знака подстройки соединен со вторым вхо дом схемы совпадения, выход которой соединен с первым вхо дом блока регистров сдвига, второй вход которого соединен с шестым выходом распределителя тактов, а выход соединен со вторым входом формирователя сигнала величины подстройки, кроме того, первый и второй информационные входы/выходы устройства переключения каналов подключены к приемоизлучающим преобразователям, третий и четвертый информационные входы/выходы подключены к первому и вто рому коммутаторам, а управляющий вход подключен к третьему выходу распределителя тактов, второй вход которого соединен с выходом вычислительного устройства и вторыми управляющими входами четвертого и пятого коммутаторов. Сравнительный анализ известных и заявленного устройств показывает, что заявленный ультразвуковой частотно-временной расходомер обеспечивает работу с реверсивными потоками, причем при измерении малых расходов исключается явление "захвата частот". Кроме того, возможность вычисления суммарной частоты, что позволяет выполнять периодическую поверку и калибровку расхо домера в автоматическом режиме при изменении параметров измеряемой среды, что приводит к подавлению их влияния, а следовательно, к повышению точности измерений. Введение дополнительных возможностей, таких как самокалибровка, работа с реверсивными потоками и устранение явления захвата частот, реализованное с помощью работы двух уп равляемых генераторов в режиме формирования четырех частот с постоянным смещением частот, а также выполнение подстройки с переменным шагом приводит к улучшению динамических ха рактеристик расходомера и повышению точности измерений для изменяющихся потоков. Это позволяет сделать вывод, что новая совокупность признаков заявленного расходомера соответствует критерию «изобретательский уровень». Работа ультразвукового частотно-временного расхо домера основана на измерении разности времен распространения ультразвукового сигнала по и против потока измеряемой среды. При зондировании время распространения сигнала в измеряемой среде по потоку равно tp1 = L/(с + vcos a), против потока - tp2 = L/(с – vcos a), где L - расстояние, проходи мое ультразвуком в измеряемой среде; с - скорость ультразвука в измеряемой среде; v - скорость движения измеряемой среды; cosa - косинус угла между направлением излучения ультразвукового сигнала и направлением потока среды. Общее вре мя распространения зондирующего сигнала равно Т1 = t р1 + t е1, T 2 = tр2 + t е2 где tp1 и t p2 - вре мена распространения сигнала в измеряемой среде; te1 и te2 - времена распространения сигнала в элементах конструкции и электрических цепях. Процесс измерения скорости потока, а следовательно, расхода измеряемой среды, разбивается на два цикла. В первом цикле при зондировании по потоку работает уп равляемый генератор 1, который формирует часто ту f 1, обратно пропорциональную времени распространения ультразвукового сигнала, а схема формирования временных интервалов делит эту часто ту с коэффи циентом k (Т1 = k/f 1). При зондировании против потока работает управляемый генератор 2, который формирует частоту f2 при коэффициенте деления k-m так, что Т2 = (k-m)/f2. Коэффициент k выбирается из условия k = Тo fo , где То - время распространения ультразвука между датчиками в неподвижной среде для средней скорости ультразвука, а fo - средняя частота управляемых генераторов. Во втором цикле измерения при зондировании по потоку работает третий управляемый генератор, частота которого равна f3 , коэффициент деления (k-m), а против потока - четвертый генератор с частотой f4 при коэффициенте деления k, т.е. T3 = (k - m)/f3 , T4 = k/f 4. Разность частот, получае мая в первом цикле, равна df1 = f 1 - f2 = k/T1 - (k - m)/T2. Аналогичная разность частот, получае мая во вто ром цикле, равна df2=f4 - f 3 = k/T 2 - (k-m)/T1 . Вводя операцию вычитания, в результате получаем df = (2k-m)(1/Т1 - 1/T 2). С учетом вы ражений для Т1 и T2 получаем df = 2(2k-m) cos a v/(L+ (te1 + te2)·с) . Сумма разностных частот зависит от геометрических размеров мерного участка и скорости звука в среде и равна fs = 2c·m/(L + (t e1 + te2) · c) . Выражение для суммы разностных частот может быть использовано для оценки скорости звука и учета ее влияния для повышения точности, т.е. С = fs L/(2m - Sfts), ts = t e1 + t e2 , df = 2(2k - m) cos a v h/L, где поправка на изменение скорости звука в среде h равна h = 1 - fs ts/2m. В результате в каждом цикле работы мы имеем разнесение частот ге нераторов на величину, равную mf/k, и результирующую разность частот, зависящую только от скорости движения среды и геометрических параметров акустического тракта (мерного участка расхо домера). Расход вы числяется по формуле Q = /fkD2/4, где (1) D - диаметр мерного участка, p= 3, 14, v = Ldf/2(2k - m) h cos a. (2) Изобретение поясняется чертежом, где приведена блок-схе ма ультразвукового частотно-временного расхо домера. Цифрами обозначены: 1 и 2 - приемоизлучающие преобразователи 3 - первый коммутатор 4 - усили тель 5 - вто рой коммутатор 6 - фор мирователь зондирующего сигнала 7 - распределитель тактов 8 - временной селектор 9 - вычислительное устройство 10 - делитель частоты 11 - первая и 12 - вторая схемы управления 13 - первый и 14 - вто рой генераторы 15 - третий, 16 - четвертый и 17 - пятый коммутато ры 18 - амплитудный селектор 19 - третья и 20 - четвертая схемы управления 21 - измеритель разности 22 - регистр знака подстройки 23 - схе ма совпадения знаком подстройки 24 - распределитель сигнала подстройки 25 - формирователь сигнала величины подстройки 26 - блок регистров сдвига. Ультразвуковой частотно-временной расходомер содержит два приемоизлучающи х преобразователя 1 и 2, входы/выходы которых че рез первый коммутатор 3 соединены с усилителем 4, а через второй коммутатор 5 - c формирователем 6 зондирующего сигнала, распределитель 7 тактов, первый выход которого соединен со входом формирователя 6 зондирующего сигнала, а также временной селектор 8, вычислительное устройство 9, делитель частоты 10, первую 11 и вторую 12 схемы управления, первый 13 и второй 14 генераторы, третий 15, четвертый 16 и пятый 17 коммутаторы. Он также дополнительно содержит амплитудный селектор 18, третью 19 и четвертую 20 схемы управления, измеритель 21 разности, ре гистр 22 знака подстройки, схему 23 совпадения знаком подстройки, распределитель 24 сигнала подстройки, формирователь 25 сигнала величины подстройки и блок 26 регистров сдвига. Вто рой выход распределителя 7 тактов сое динен с управляющими вхо дами первого 3, вто рого 5 и третьего 15 коммутаторов и первым управляющим вхо дом распределителя 24 сигнала подстройки. Третий выход - со вто рым управляющим входом распределителя 24 сигнала подстройки, управляющими входами четвертого 16 и пятого 17 коммутатором и первым вхо дом вычислительного устройства 9. Четвертый выход - с первым входом делителя 10 частоты, вто рой вход которого соединен с выходом третьего 15 коммутатора и вхо дом распределителя 7 тактов, а вы ход - со вторым входом временного селектора 8. Выход селектора соединен с третьим входом распределителя 24 сигнала подстройки, четвертый вход которого соединен с выходом формирователя 25 сигнала величины подстройки, а первый и второй выходы соединены с входами соответственно первой 11 и второй 12 схем управления. Выходы генераторов 13 и 14 соединены с входами третьего 15 коммутатора и измерителя 21 разности, выход которого соединен со вторым входом вычислительного устройства 9. Вхо ды третьей 19 и четвертой 20 схем управления соединены соответственно с третьим и четвертым выходами распределителя 24 сигнала подстройки, а их выходы - с вхо дами четверто го 16 и пятого 17 коммутаторов. Вто рые входы коммутаторов соединены с выходами соответственно первой 11 и второй 12 схем уп равления, а выходы - с входами первого 13 и второго генераторов. Кроме того, выход временного селектора 8 соединен со вторым входом схемы 23 совпадения знаков подстройки и первым входом регистра 22 знака подстройки, второй вход которого соединен с выходом формирователя 25 сигнала величины подстройки. Первый вход схе мы 23 совпадения знаков подстройки соединен с выходом регистра 22. знака подстройки, а выход - с первым входом блока 26 регистров сдвига, второй вход которого соединен с пятым выходом распределителя 7 тактов, а вы ход - со вто рым входом формирователя 25 сигнала величины подстройки, первый вход которого соединен с шестым выходом распределителя 7 тактов, кроме того, выход усилителя 4 связан с входом амплитудного селектора 18, выход которого соединен с первым входом временного селектора 8. Расходомер работает следующим образом. Цикл измерения содержит четыре такта - два такта измерения по потоку и два такта измерения против потока. В первом такте первый и второй коммутаторы 3 и 5 переведены в режим измерения, например, по потоку, при этом зондирующий сигнал - с выхода фор мирователя зондирующего сигнала 6 через второй коммутатор 5 поступает на вход первого приемоизлучающего преобразователя 1, а прошедший через измеряемую среду сигнал принимается вторым приемоизлучающим преобразователем 2 и, пройдя через первый коммутатор 3, усили тель 4 и амплитудный селектор 18, поступает на временной селектор 8. На вто рой вход временного селектора 8 поступает сигнал с первого управляемого генератора 13, прошедший через третий коммутатор 15 и поделенный делителем частоты 10 с коэффициентом деления k, задаваемым распределителем тактов 7. В зависимости от вре менного расположения этих двух сигналов на выходе временного селектора 8 формируется сигнал знака подстройки, который через формирователь сигнала величины подстройки 25, распределитель сигнала подстройки 24 поступает на первую схему уп равления 11, которая через четвертый коммутатор 16 изменяет часто ту ге нератора 13 в ту или другую сторону в зависимости от знака подстройки. Во вто ром такте первый 3 и вто рой 5 коммутаторы переводятся в режим измерения против потока, при котором зондирующий сигнал поступает на вход приемоизлучающего преобразователя 2, а прошедший через среду сигнал принимается приемоизлучающим преобразователем 1, проходит че рез первый коммутатор 3, усилитель 4, амплитудный селектор 18 на временной селектор 8. На второй вход временного селектора 8 поступает сигнал с перво го генератора 13 через третий коммутатор 15 и делитель частоты 10 с коэффициентом деления k-m. На измерителе разности 21 фор мируется значение первой разностной частоты df1, которое поступает на вычислительное устройство 9. Подстройка в данном такте измерения проводится второй схе мой управления 12, управляемой распределителем сигнала подстройки 24 от формирователя сигнала величины подстройки 25 в зависимости от знака подстройки, поступающего с временного селектора 8. В третьем такте измерения проводятся по потоку аналогично первому такту за исключением того, что первый генератор 13 управляется третьей схемой управления 19 через четвертый коммутатор 16, а делитель часто ты 10 делит эту частоту с коэффи циентом k-m. В четвертом такте измерения проводятся против потока аналогично второму такту, при этом вто рой генератор 14 управляется четвертой схемой управления 20 через пятый коммутатор 17, а делитель частоты 10 делит частоту с коэффи циентом k. На выходе измерителя разности 21 получается вто рая разностная частота df2, подаваемая на вычислительное устройство 9. Вычислительным устройством 9 проводится вычисление расхо да Q по определенному алгоритму по величине разности двух разностных частот df = = df1 -df 2 в зависимости от коэффициентов де лителя частоты k и m. Расход Q вы числяется по формуле (1), где v определяется из формулы (2). Для повыше ния точности измерения расхо да для изменяющи хся потоков служит схема динамической подстройки, включающая регистр знака подстройки 22, схему совпадения 23 и блок регистров сдвига 26. На 4-разрядном регистре знака подстройки 22 по концу сигнала подстройки с формирователя сигнала величины подстройки 25 происхо дит запоминание знака прошедшей подстройки для данного такта измерения. В каждом текущем такте измерения проводится сравнение знака текущей и предыдущей подстройки схемой совпадения 23. При совпадении знаков подстройки для данного такта измерения соответствующий регистр блока регистров сдви га 26 увеличивает код величины подстройки вдвое, а при несовпадении знаков - уменьшает вдвое, изменяясь от максимального к минимальному значению, что приводит к ускорению процесса перестройки генераторов при изменении скорости потока и, в то же время, обеспечивает малые величины изменения частоты при уста новившемся потоке. Это уменьшает случайную составляющую погрешности и увеличивает точность слежения за переменными потоками. Разрядность регистров сдвига определяет соотношение между ве личиной минимального и максимального значения подстройки и при 8-ми разрядном регистре это соотношение равно 128. Наличие разных коэффи циентов деления для генераторов приводит к смещению их рабочих частот друг относительно друга на величину fr = =mfo/k, где fo - часто та генераторов при нулевом потоке, что исключает явление "захвата частот" при измерении малых расхо дов. Введение еще двух тактов работы обеспечивает работу с реверсивными потоками, причем изменение направления потока приводит к перемене знака разности частот и соответственно величины текущего расхо да. Кроме того, введение дополнительных тактов работы позволяет вычислять суммарную часто ту fs = df1 + df 2, которая характеризует размер акустической базы расхо домера и параметры измеряемой среды и может быть использована для начальной поверки и калибровки расхо домера, а также его периодической поверки, и для корректи ровки коэффициента преобразования в процессе работы в зависимости от изменения внешних факторов, что приводит к существенному подавлению их влияния, а следовательно, и повышению точности измерения. Введение дополнительных схем управления и коммутаторов и дополнительных циклов измерения обеспечивает автоматическое вычитание сдвига частот, позволяет определять направление потока и дает инфор мацию об изменении параметров среды, влияющи х на точность измерения расхо да. Динамическая подстройка увеличивает точность для изменяющи хся потоков. Схемы управления 11, 12, 19 и 20 - это интеграторы на операционных усилителях. Распределитель сигнала подстройки 24 - четырехканальный коммутатор с кодовым управлением. Формирователь сигнала величины подстройки 25 - преобразователь кода в дли тельность импульса. Ма кетные образцы расходомера прошли испытания на расхо домерной установке КБ "Южное" г. Днепропетровск, Украина. Полученные результаты показали, что заложенные принципы обеспечивают достижение результата. НПООО "Ультрасоникс" разработана конструкторская документация и изготовлены опытно-промышленные образцы. Расхо домер подготовлен к проведению Государственных приемочных испытаний и запуску в промышленное производство. Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03
ДивитисяДодаткова інформація
Назва патенту англійськоюUltra-sonic frequency-time flow rate meter
Автори англійськоюRomanov Anatolii Fylypovych, Shestakov Leonid Volodymyrovych, Mukharskyi Oleksandr Matviiovych
Назва патенту російськоюУльтразвуковой частотно-временной расходомер
Автори російськоюРоманов Анатолий Филиппович, Шестаков Леонид Владимирович, Мухарский Александр Матвеевич
МПК / Мітки
МПК: G01F 1/66
Мітки: витратомір, частотно-часовий, ультразвуковий
Код посилання
<a href="https://ua.patents.su/7-20196-ultrazvukovijj-chastotno-chasovijj-vitratomir.html" target="_blank" rel="follow" title="База патентів України">Ультразвуковий частотно-часовий витратомір</a>
Ультразвуковий частотно-часовий витратомір
Номер патенту: 17353
Опубліковано: 29.12.1999
Автори: Шєстаков Леонід Владіміровіч, Пугачьов Ігорь Сємьоновіч, Мухарскій Алєксандр Матвєєвіч, Романов Анатолій Філіповіч
МПК: G01F 1/66
Мітки: ультразвуковий, витратомір, частотно-часовий
Формула / Реферат:
Ультразвуковой частотно-временной расходомер, содержащий два приемоизлучающих преобразователя, первый коммутатор, выход которого соединен с последовательно соединенными усилителем, амплитудным селектором и временным селектором, второй коммутатор, соединенный с формирователем зондирующего сигнала, вход которого соединен с первым выходом распределителя тактов, второй выход которого соединен с управляющими входами первого, второго и третьего...
Ультразвуковий доплерівський витратомір
Номер патенту: 22920
Опубліковано: 05.05.1998
Автори: Сорокопут Валерій Леонідович, Стеценко Анатолій Іванович, Близнюк В'ячеслав Іванович, Костильов Володимир Васильович, Стеценко Андрій Анатолієвич
Мітки: витратомір, ультразвуковий, доплерівський
Формула / Реферат:
1. Ультразвуковой доплеровский расходомер, содержащий установленные с наружной стороны трубопровода излучающий и приемный ультразвуковые преобразователи, усилитель высокой частоты, вход которого соединен с выходом приемного преобразователя, запоминающее устройство, последовательно соединенные первый усилитель низкой частоты и первый триггер Шмитта, отличающийся тем, что дополнительно введены усилитель мощности, первый и второй смесители,...
Демодулятор цифрового частотно-модульованого сигналу
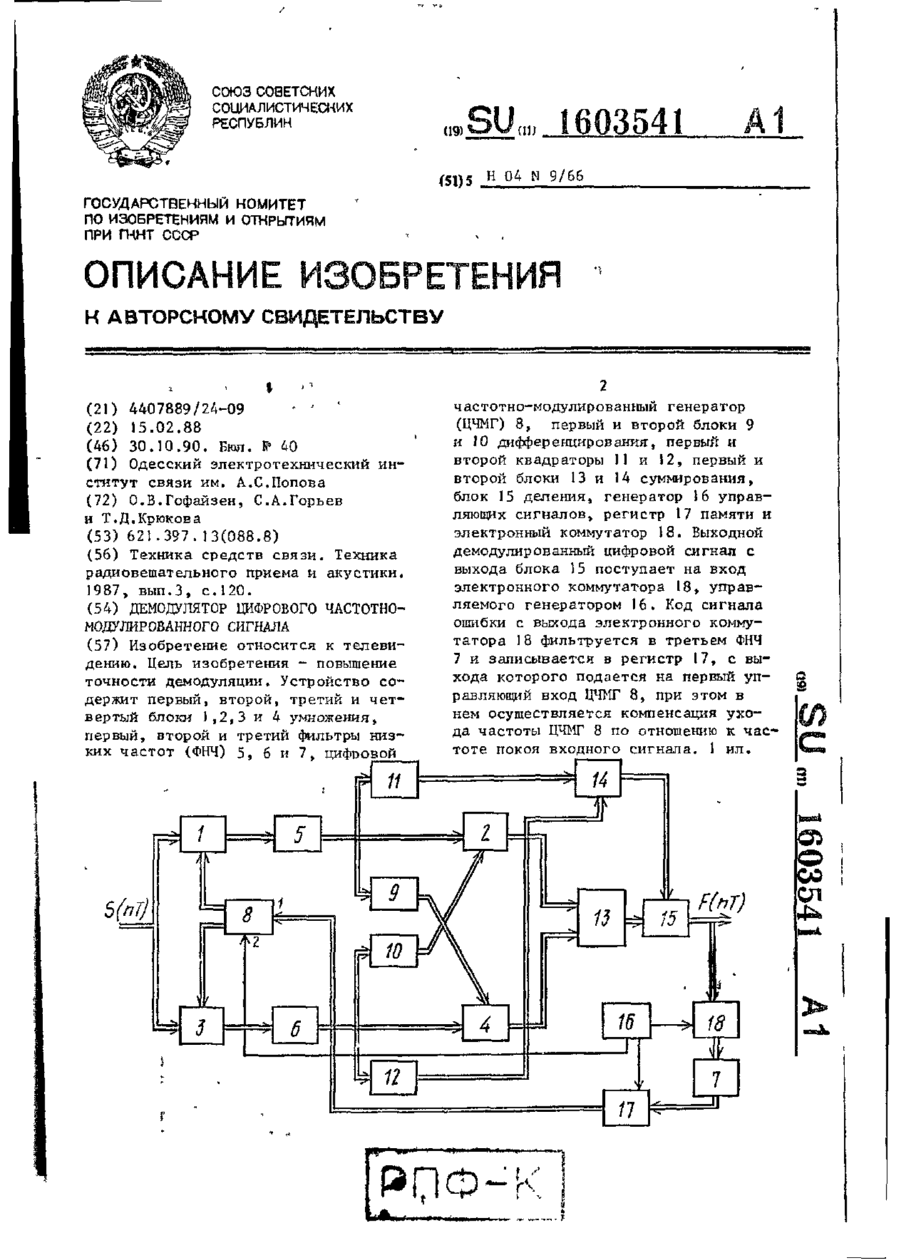
Номер патенту: 11894
Опубліковано: 25.12.1996
Автори: Горьєв Сергій Адольфович, Крюкова Тетяна Дмитрівна, Гофайзен Олег Вікторович
МПК: H04N 9/66
Мітки: демодулятор, цифрового, частотно-модульованого, сигналу
Формула / Реферат:
Демодулятор цифрового частотно-модулированного сигнала, содержащий последовательно соединенные первый блок умножения, первый фильтр низкой частоты <ФН Ч), второй блок умножения, первый блок суммирования и блок деления, выход которого является выходом устройства, а также последовательно соединенные третий блок умножения, второй ФНЧ и четвертый блок умножения, выход которого соединен с вторым входом первого блока суммирования, при этом...
Формувач цифрового частотно-модульованого сигналу
Номер патенту: 11896
Опубліковано: 25.12.1996
Автори: Гофайзен Олег Вікторович, Горьєв Сергій Адольфович, Крюкова Тетяна Дмитрівна
МПК: H04L 27/10
Мітки: формувач, цифрового, сигналу, частотно-модульованого
Формула / Реферат:
Формирователь цифрового частотно-модулированного сигнала, содержащий умножитель на весовой коэффициент, последовательно соединенные первый сумматор, блок вычисления синуса, первый перемножитель и второй сумматор, последовательно соединенные блок вычисления косинуса, вход которого соединен с выходом первого сумматора, и второй перемножитель, выход которого соединен с вторым входом второго сумматора, а также элемент задержки, который...
Цифровий пристрій розділення сигналів яскравості та кольоровості у декодері системи секам
Номер патенту: 15640
Опубліковано: 30.06.1997
Автори: Матвєєв Олександр Олександрович, Сташків Юрій Володимирович, Басій Валерій Тимофійович, Гофайзен Олег Вікторович, Шишкін Олександр Володимирович, Бабич Володимир Васильович, Крюкова Тетяна Дмитрівна, Дідич Юрій Романович, Платзерова Наталія Олександрівна, Медвєдев Юрій Андрійович
МПК: H04N 9/78
Мітки: розділення, пристрій, секам, яскравості, сигналів, цифровий, кольоровості, системі, декодері
Формула / Реферат:
Цифровое устройство разделения сигналов яркости и цветности в декодере системы СЕКАМ, содержащее последовательно соединенные первый блок задержки и сумматор, последовательно соединенные второй блок задержки и электронный коммутатор, отличающееся тем, что введены последовательно соединенные аналого-цифровой преобразователь, вход которого является входом полного цветового видеосигнала (ПЦВС) и блок разделения ПЦВС на низкочастотную (НЧ) и...
Попередній патент: Спосіб управління турбулентністю в пограничному шарі або іншій граничній зі стінкою ділянці течії середовища (варіанти)
Наступний патент: Спосіб проведення аналізу на приховану присутність крові
Випадковий патент: Збірний сталевий штовхач для роторної печі та роторна піч з вогнетривким покриттям