Спосіб визначення контактного навантаження в фрикційних вузлах в момент виникнення заїдання
Номер патенту: 34919
Опубліковано: 26.08.2008
Автори: Філоненко Сергій Федорович, Стахова Анжеліка Петрівна, Стадниченко В'ячеслав Миколайович, Кравченко Віталій Григорович
Формула / Реферат
Спосіб визначення контактного навантаження в фрикційних вузлах в момент виникнення заїдання, що включає навантаження фрикційного вузла з одночасним визначенням характеристик, за якими роблять висновки про контактне навантаження в фрикційному вузлі в момент виникнення заїдання, який відрізняється тим, що як вищезгадані характеристики реєструють випромінювання сигналів акустичної емісії, а контактне навантаження в момент виникнення заїдання визначають за усередненою амплітудою результуючого сигналу акустичної емісії в момент її різкого зростання.
Текст
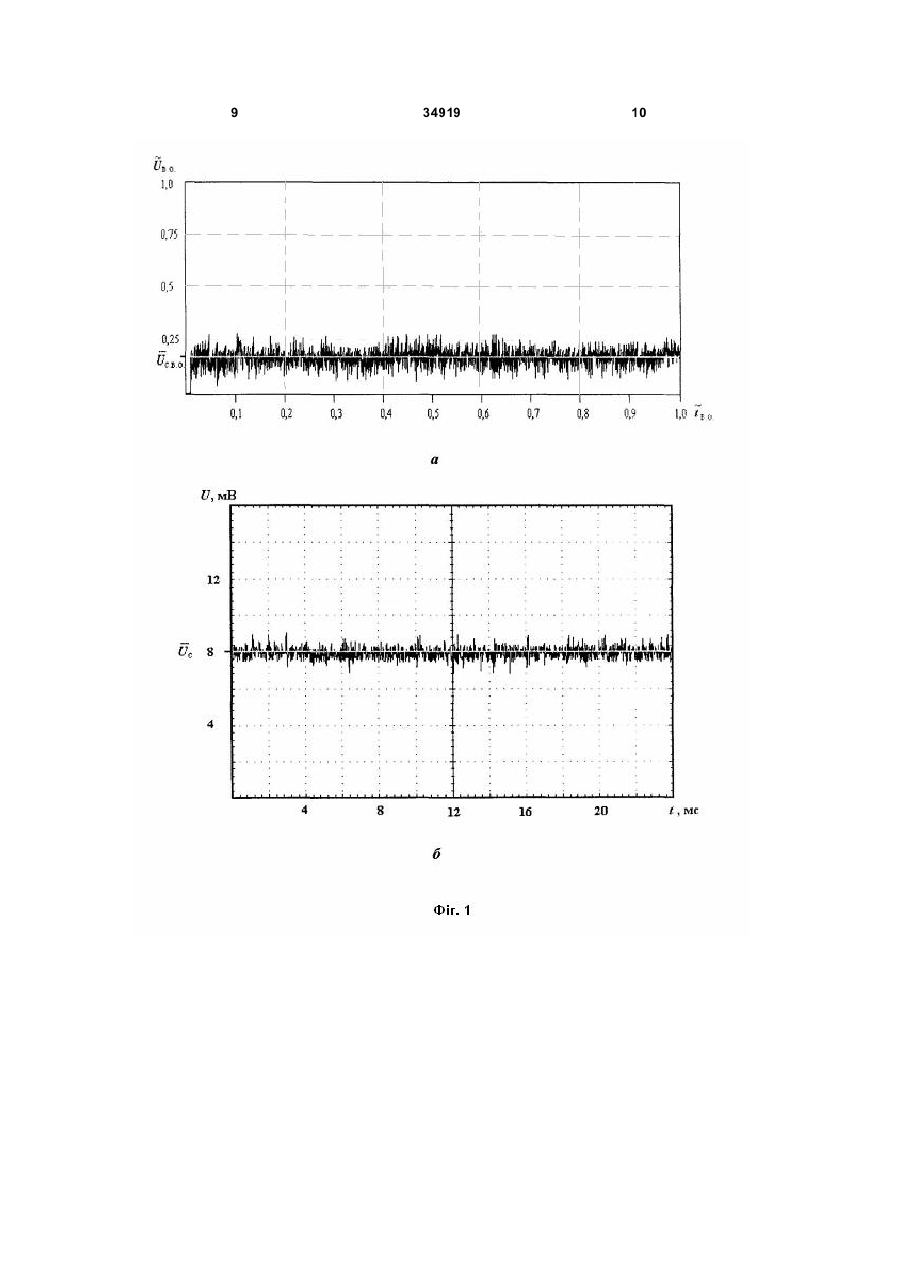
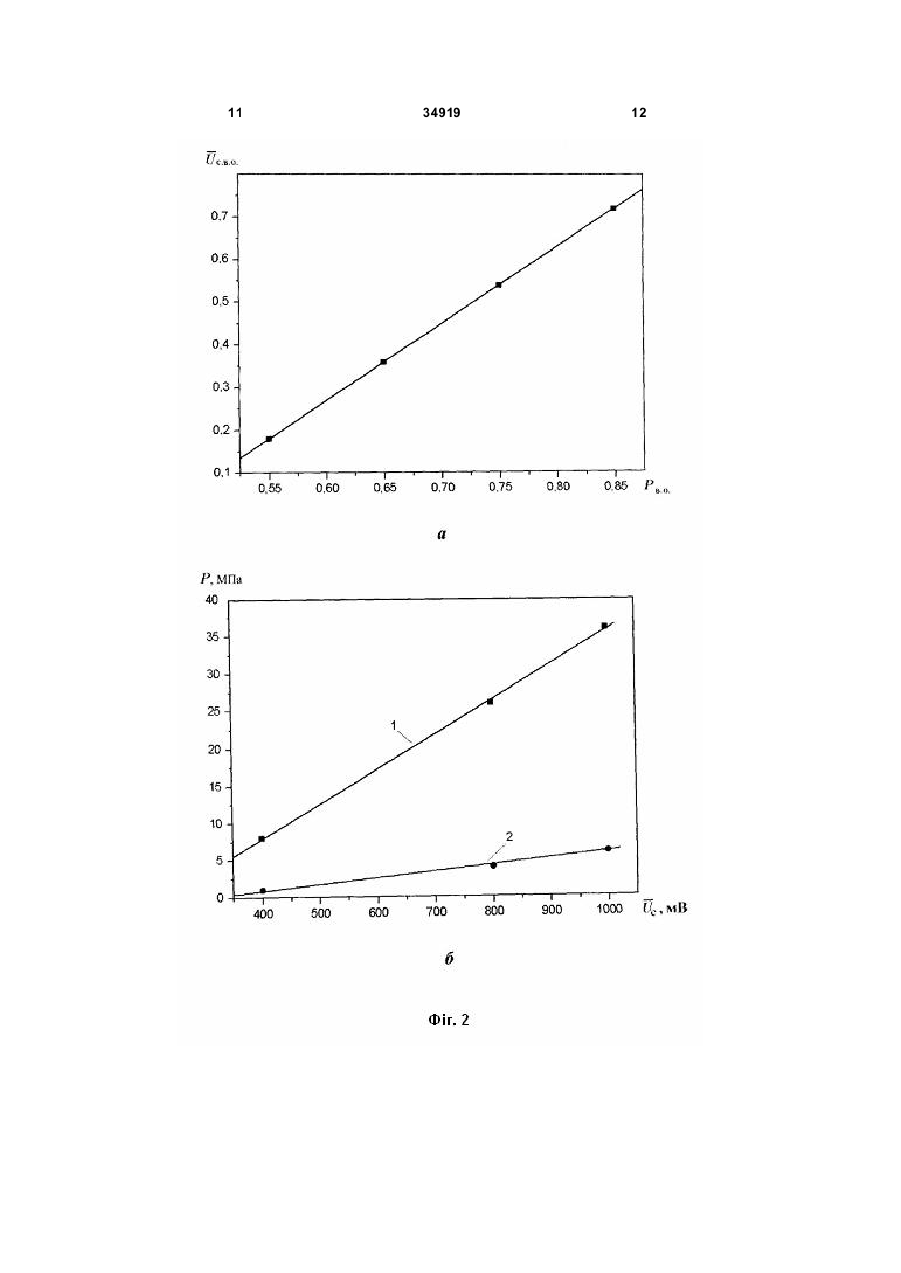
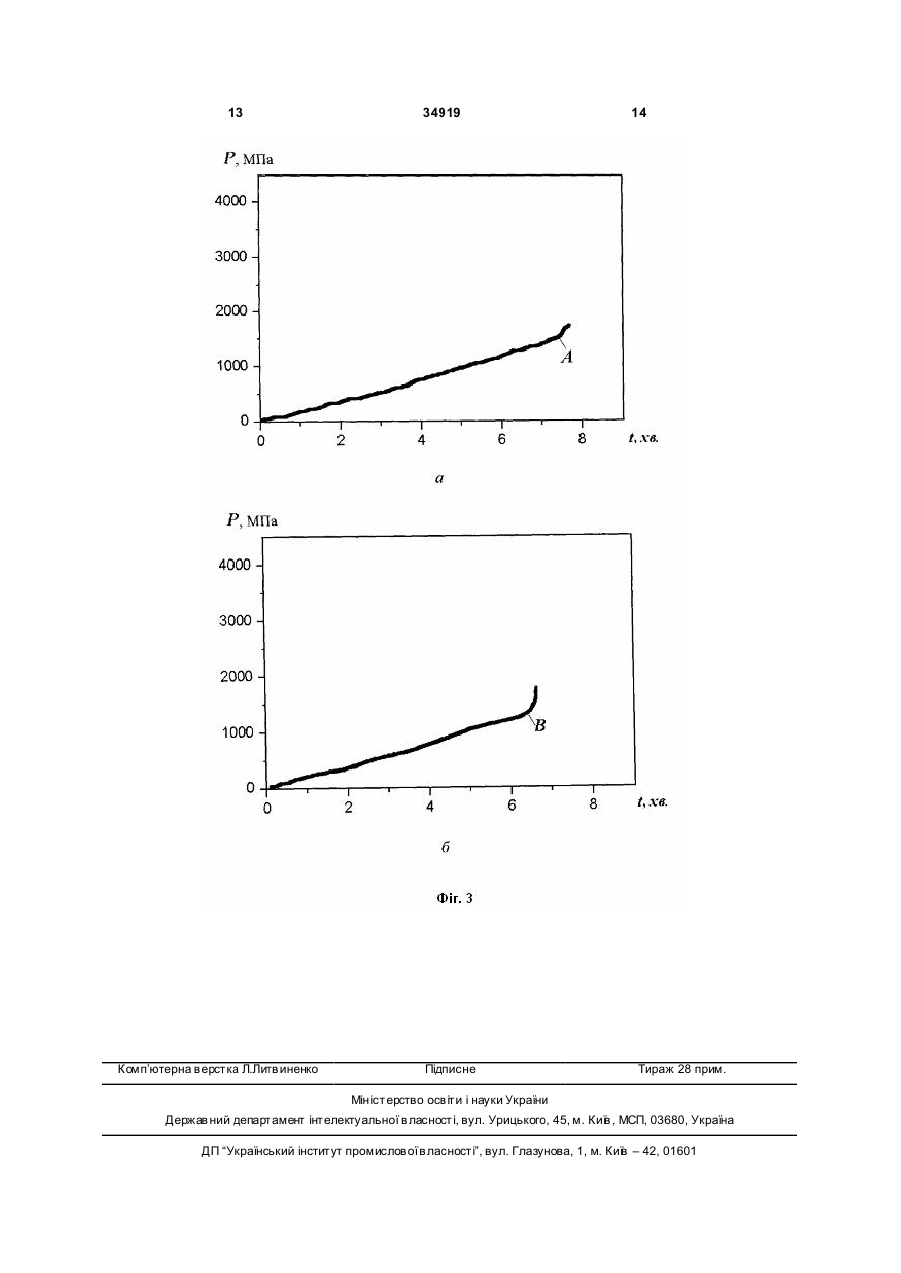
Спосіб визначення контактного навантаження в фрикційних вузла х в момент виникнення 3 34919 проведення вимірювань, підвищується чутливість і розрізнювальна здатність та збільшується технологічність контролю фрикційних вузлів. При цьому контактне навантаження визначається на мікро рівні процесів заїдання, тобто на початковій її стадії. Це, по-перше, дозволяє більш точно визначити контактне навантаження в момент виникнення заїдання і більш достовірно оптимізувати умови роботи фрикційного вузла. Подруге, в умовах експлуатації це дозволяє запобігати катастрофічному руйнуванню фрикційних вузлів, і, як наслідок, забезпечується можливість своєчасного вилучення фрикційних вузлів з роботи, їх ремонту і тим самим продовження строків експлуатації. Поставлена задача вирішується тим, що у способі визначення контактного навантаження в фрикційних вузлах в момент виникнення заїдання, що включає навантаження фрикційного вузла з одночасним визначенням характеристик, за якими роблять висновки про контактне навантаження в фрикційному вузлі в момент виникнення заїдання, 4 згідно корисної моделі, в якості вище згаданих характеристик реєструють випромінювання сигналів акустичної емісії, а контактне навантаження в момент виникнення заїдання визначають за усередненою амплітудою результуючого сигналу акустичної емісії в момент її різкого зростання. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, і технічними результатами, що досягаються, полягає у наступному. При прикладанні до фрикційного вузла навантаження на його поверхнях контактної взаємодії відбуваються процеси зношування, які пов'язані з руйнуванням вторинних структур І і II типів. Руйн ування вторинних структур І типу пов'язано з процесами пластичної деформації, а II типу - з крихким руйнуванням. Дані процеси супроводжуються випромінюванням сигналів акустичної емісії. Теоретичні дослідження показали, що результуючий сигнал акустичної емісії при руйнуванні вторинних стр уктур І та II типів описується виразом виду z ( t -t i ) r(t - t j ) -Be 0d e U' (t ) = å U0 d0 s 3 e 4z(t - t i )e -bs 0 e e + å U0de 0de e 0e i j де: U0=kN0cz - максимально можливий зсув при руйнуванні без дисперсного за міцністю поверхневого шару ST матеріалу; k - коефіцієнт пропорційності; No - кількість елементарних об'ємів в області неоднорідності ST, c, b - коефіцієнти розподілу елементарних об'ємів за міцністю (залежать від фізико-механічних властивостей матеріалу); (s0е - напруження; t - час; z=Е/x; x – коефіцієнт в'язкості; Е - модуль пружності; t+d 2 d0= ò a(t )dt - середня тривалість збурювання t - d2 при руйнуванні елементарного об'єму; a(t) функція, що визначає форму одиночного імпульсу збурення (однакова для всіх елементарних u об'ємів); U 0d = a 0 M d dd - амплітуда зсуву, яка l0 залежить від фізико-механічних характеристик матеріалу; a 0 - амплітуда імпульсу одиночного збурення при русі дислокації (постійна і не залежить від деформації); ℓ0 - відстань між двома актами випромінювання одиночної дислокації; ud середня швидкість руху дислокацій (вважається постійною); e0d відносна деформація; d1 t+ 2 d= d ò a1(t )dt - середня тривалість імпульсу t -d 1 2 збурення; a 1(t) - функція, яка визначає форму імпульсу збурення (є не змінною); М, В, t - постійні (залежать від фізико-механічних характеристик матеріалу). Згідно виразу (1) параметри результуючого сигналу акустичної емісії при руйнуванні ( r t -t j ) ,(1) вторинних структур І та II типу, перш за все, його амплітуда, залежать від напруженодеформованого стану (s0е, e0d), який визначається контактним навантаженням поверхневих шарів фрикційного вузла. Типовий результуючий сигнал акустичної емісії (теоретичний), згідно (1), для заданих умов контактного навантаження у відносних одиницях, наведено на Фіг.1, а, що має добре узгодження з результатами експериментальних досліджень (Фіг.1, б). При відсутності зміни контактного навантаження (напружено-деформованого стану) результуючий сигнал акустичної емісії має постійне значення усередненої амплітуди ( Uc .в. о. , Uc , відповідно, Фіг.1, а, б). Однак, як показали теоретичні дослідження, зі зростанням контактного навантаження відбувається зростання усередненої амплітуди результуючого сигналу акустичної емісії. При цьому визначено, що залежність зміни усередненої амплітуди результуючого сигналу акустичної емісії від контактного навантаження носить лінійний характер (Фіг.2, а) і описується виразом виду (2) Uc.в.о. = A + BPВ.О. , де А і В - коефіцієнти апроксимуючого виразу (для даних наведених на Фіг.2, а значення коефіцієнтів А і В, відповідно, дорівнюють -А=0,81, В=1,8); РB.O. - контактне навантаження у відносних одиницях. Експериментальні дослідження показали, що залежність зміни усередненої амплітуди результуючого сигналу акустичної емісії від контактного навантаження (Фіг.2, б крива 1) також описується лінійною функцією виду (3) Uc. = A 1 + B1PК.Н. , 5 34919 де А1 і В 1 - коефіцієнти апроксимуючого виразу (для даних наведених на Фіг.2, б значення коефіцієнтів А1 і В 1, відповідно, дорівнюють - А=10,71, В=0,046); РК.Н. - контактне навантаження. При цьому дисперсія апроксимації для імовірності р=0,9997 складає s2=0,55345, тобто експериментальні данні описуються з мінімальною похибкою. Із залежності (3) можна отримати зворотну залежність, що описує контактні навантаження від усередненої амплітуди результуючого сигналу акустичної емісії. Як показали дослідження залежність описується лінійною функцією виду PK .H. = C + D Uc (4) , де С і D - коефіцієнти апроксимуючого виразу (значення коефіцієнтів С і D відповідно, дорівнюють - С=236,35, D=21,61). При цьому дисперсія апроксимації експериментальних даних для імовірності р=0,9978 складає s2=28,94, тобто експериментальні дані (значення контактного навантаження) описуються з мінімальною похибкою, яка в середньому не перевищує 0,7%. Існування залежності (4) дозволяє визначати контактне навантаження за результатами вимірювання значення усередненої амплітуди результуючого сигналу акустичної емісії в будь який момент часу. Залежність зміни напруги на виході тензодатчиків від контактного навантаження (крива 2, Фіг.2, б) подібна залежності для усередненої амплітуди результуючого сигналу акустичної емісії (крива 1, Фіг.2, б). Вона також описується лінійною функцією з похибкою, яка в середньому складає 8,5%. При цьому її чутли вість, а саме і розрізнювальна здатність, до зміни контактного навантаження в 6 разів менша, ніж чутливість за акустичною емісією (Фіг.2, б). Оскільки акустична емісія є достатньо чутливою до фізичних процесів, що відбуваються на поверхнях контакту фрикційного вузла, то в момент часу виникнення заїдання, який супроводжується зростанням контактного навантаження, відбувається стрибкоподібне зростання усередненої амплітуди результуючого сигналу акустичної емісії, що дозволяє однозначно визначити момент початку виникнення заїдання і відповідно йому значення контактного навантаження. Подальший ріст (характер зміни) усередненої амплітуди результуючого сигналу акустичної емісії буде залежати від швидкості зміни напружено-деформованого стану поверхонь контакту фрикційного вузла. Не залежно від цього точка стрибкоподібного зростання усередненої амплітуди результуючого сигналу акустичної емісії має однозначне визначення, що дозволяє визначати контактне навантаження в момент початку виникнення заїдання. Це обумовлено високою чутливістю методу акустичної емісії на мікро рівні процесів, які протікають в поверхневих шарах матеріалів фрикційного вузла, тобто значною розрізнювальною здатністю і точністю вимірювань амплітудно-часових параметрів результуючого сигналу акустичної емісії в мікро секундному діапазоні. Наслідком цього є висока 6 точність визначення контактного навантаження. Крім того, важливим є те, що не треба мати стаціонарну установку датчика акустичної емісії, що дозволяє проводити вимірювання в промислових умовах. Таким чином, не викликає сумнівів, що використання акустичної емісії з визначенням усередненої амплітуди результуючого сигналу є ефективним способом визначення контактного навантаження в момент виникнення заїдання в фрикційних вузлах. При цьому використання акустичної емісії дозволяє здійснювати визначення контактного навантаження в момент виникнення заїдання значно швидше і простіше, з більш високою точністю, потребує менших технічних та часових ви трат, що, безумовно, забезпечує його технологічність. Слід також відмітити, що за рахунок значної чутливості методу акустичної емісії на мікро рівні фізичних процесів, що протікають в поверхневих шарах матеріалів фрикційних вузлів, контактне навантаження в момент виникнення заїдання визначається на початковій стадії його появи, тобто на 10%-20% раніше, ніж з використанням відомого способу. Це дозволяє не тільки більш точно визначити контактне навантаження в момент початку виникнення заїдання при оптимізації роботи фрикційних вузлів, але й запобігати розвитку процесів катастрофічного руйнування фрикційних вузлів в умовах експлуатації, і, як наслідок, подовжувати строки їх експлуатації. Спосіб проілюстровано на Фіг.1, Фіг.2 та Фіг.3, де на Фіг.1 показано залежності зміни усередненої амплітуди результуючого сигналу акустичної емісії в часі при незмінному значенні контактного навантаження, відповідно: а - теоретична залежність у відносних одиницях; б експериментальна залежність; UCB0 , Uc - середнє значення амплітуди результуючих сигналів акустичної емісії, відповідно, у відносних одиницях та в мВ. Залежність Фіг.1, б отримано при випробуванні фрикційного вузла за конструктивною схемою „диск-диск" в режимі тертя кочення з 20% прослизанням, зразки якого виготовлено зі сталі 12Х2Н4А з діаметром 25мм і товщиною 15мм, один з яких був нерухомий, а швидкість обертання рухомого зразка складала 500об/хв. На Фіг.2 показано залежності зміни усередненої амплітуди результуючих сигналів акустичної емісії та сигналів на виході тензорезисторів від контактного навантаження: а теоретична залежність зміни усередненої амплітуди результуючих сигналів акустичної емісії від контактного навантаження у відносних одиницях; б - 1 - експериментальна залежність зміни усередненої амплітуди результуючих сигналів акустичної емісії від контактного навантаження; 2 - експериментальна залежність зміни усередненої амплітуди сигналів на виході тензодатчиків від контактного навантаження. На Фіг.3 показано залежності зміни контактного навантаження в часі при випробуванні фрикційного вузла за конструктивною схемою „диск-диск" в режимі тертя кочення з 20% прослизанням, зразки якого виготовлено зі сталі 7 34919 12Х2Н4А з діаметром 25мм і товщиною 15мм, один з яких був нерухомий, а швидкість обертання рухомого зразка складала 500об/хв.: а - контактне навантаження, яке визначається за амплітудою електричного сигналу, що реєструється тензорезисторами; б - контактне навантаження, яке визначається за усередненою амплітудою результуючого сигналу акустичної емісії; А, В точки за якими визначається контактне навантаження в момент виникнення заїдання з використанням, відповідно, тензорезисторів і датчика акустичної емісії. Приклад конкретної реалізації способу, що заявляється Визначалось контактне навантаження в момент виникнення заїдання фрикційного вузла, що працює за конструктивною схемою „диск-диск" і має два зразки. Один із зразків був р ухомим. Він був закріплений на валу машини тертя та приводився в обертання за її допомогою. Інший зразок був нерухомим. Зразки були виготовлені зі сталі 12Х2Н4А, а їх розміри складали: діаметр D=25мм, товщина h=15мм. Випробування зразків проводили на універсальній машині тертя СМТ-1 в режимі тертя кочення з 20% прослизанням. В якості змащувального середовища використовувалось редукторне масло типу Б-3В. Швидкість обертання приводного вала машини тертя складала 500об/хв. Навантаження фрикційного вузла виконувалось в безперервному режимі за допомогою гідравлічного насосу. В ході випробувань фрикційного вузла проводилась реєстрація контактного навантаження за допомогою тензодатчиків, які були наклеєні на балці, що мала контакт з нерухомим зразком, та датчика сигналів акустичної емісії, який був встановлений на нерухомий зразком через акусто-прозоре мастило. Сигнали з виходу тензодатчиків після підсилення поступали в персональний комп'ютер, який проводив обробку амплітуди електричного сигналу з визначенням, відповідно їй, контактного навантаження. Представлення результатів проводилось у вигляді графічної залежності зміни контактного навантаження в часі. Для реєстрації сигналів акустичної емісії використовувався перетворювач, який був виготовлений з п'єзокераміки ЦТС-19. Сигнали акустичної емісії з виходу перетворювача після підсилення поступали в акусто-емісійну систему, яка побудована на мобільному комп'ютері. Після реєстрації сигналів акустичної емісії відбувалась їх обробка з визначенням значення усередненої амплітуди результуючого сигналу і, відповідно їй, значення контактного навантаження. Результат обробки представлявся у вигляді графічної залежності зміни контактного навантаження в часі. 8 Результати випробувань показано на Фіг.3 де наведено залежності зміни контактного навантаження в часі, які отримано з використанням обробки сигналів на виході тензорезисторів (Фіг.3, а) і усередненої амплітуди сигналів акустичної емісії (Фіг.3, б): А, В - точки за якими визначається контактне навантаження в момент виникнення заїдання, відповідно, за сигналами на виході тензодатчиків і сигналами акустичної емісії. Отримані результати випробувань фрикційного вузла показали наступне. Залежності зміни контактного навантаження в часі для обох способів спочатку носять лінійний характер(Фіг.3). Однак для тензодатчиків залежність більш порізана (Фіг.3, а), в той час як, за сигналами акустичної емісії вона більш гладка. Для обох способів в момент виникнення заїдання спостерігається відхилення від лінійності залежностей зміни контактного навантаження в часі. Однак за сигналами акустичної емісії (Фіг.3, б) це відхилення є стрибкоподібним, а за сигналами з тензодатчиків - більш плавним (Фіг.3, а). Згідно отриманих результатів контактне навантаження в момент виникнення заїдання за сигналами з тензодатчиків (точка А, Фіг.3, а) фіксується в момент часу, який становить 7,5хв. від початку випробувань фрикційного вузла, а його значення дорівнює 1560МПа. Контактне навантаження в момент виникнення заїдання за сигналами акустичної емісії (точка В, Фіг.3, б) фіксується в момент часу, який становить 6,4хв. від початку випробувань фрикційного вузла, а його значення дорівнює 1410МПа. Отже з отриманих результатів видно, що контактне навантаження в момент виникнення заїдання фрикційного вузла за сигналами акустичної емісії визначається значно раніше (на 15%), ніж за сигналами з тензодатчиків, тобто на початковій стадії виникнення заїдання. При цьому значення контактного навантаження за сигналами акустичної емісії визначається на 10% точніше, ніж за сигналами з тензодатчиків. Таким чином, не викликає сумнівів, що використання акустичної емісії з обробкою усередненої амплітуди результуючого сигналу є ефективним способом визначення контактного навантаження в момент виникнення заїдання фрикційного вузла. Це дозволяє більш точно визначити контактне навантаження в момент виникнення заїдання при оптимізації режимів їх роботи, запобігати розвитку процесів катастрофічного руйнування фрикційних вузлів в умовах експлуатації, і, як наслідок, продовжувати строки їх експлуатації. 9 34919 10 11 34919 12 13 Комп’ютерна в ерстка Л.Литв иненко 34919 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of contact loading in friction units at instant of jamming
Автори англійськоюFilonenko Serhii Fedorovych, Stakhova Anzhelika Petrivna, Stadnychenko Viacheslav Mykolaiovych, Kravchenko Vitalii Hryhorovych
Назва патенту російськоюСпособ определения контактной нагрузки в фрикционных узлах в момент возникновения заедания
Автори російськоюФилоненко Сергей Федорович, Стахова Анжелика Петровна, Стадниченко Вячеслав Николаевич, Кравченко Виталий Григорьевич
МПК / Мітки
МПК: G01N 3/56, G01N 29/04
Мітки: вузлах, задання, виникнення, навантаження, визначення, спосіб, фрикційних, момент, контактного
Код посилання
<a href="https://ua.patents.su/7-34919-sposib-viznachennya-kontaktnogo-navantazhennya-v-frikcijjnikh-vuzlakh-v-moment-viniknennya-zadannya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення контактного навантаження в фрикційних вузлах в момент виникнення заїдання</a>
Спосіб визначення моменту виникнення задирання в фрикційних вузлах
Номер патенту: 31663
Опубліковано: 25.04.2008
Автори: Філоненко Сергій Федорович, Стадниченко В'ячеслав Миколайович, Бабак Віталій Павлович
МПК: G01N 29/04, G01N 3/56, G01N 29/14
Мітки: спосіб, визначення, фрикційних, вузлах, моменту, виникнення, задирання
Формула / Реферат:
Спосіб визначення моменту виникнення задирання в фрикційних вузлах, що включає навантаження фрикційного вузла з одночасним визначенням характеристик, за якими роблять висновки про момент виникнення задирання в фрикційному вузлі, який відрізняється тим, що як вищезгадані характеристики реєструють випромінювання сигналів акустичної емісії, а момент виникнення задирання визначають за швидкістю зростання середньої потужності реєстрованих сигналів...
Спосіб визначення швидкості транспортних засобів у момент зіткнення
Номер патенту: 66462
Опубліковано: 17.05.2004
Автор: Огородніков Віталій Антонович
МПК: G01N 33/20, G01N 19/00
Мітки: момент, спосіб, швидкості, визначення, зіткнення, засобів, транспортних
Формула / Реферат:
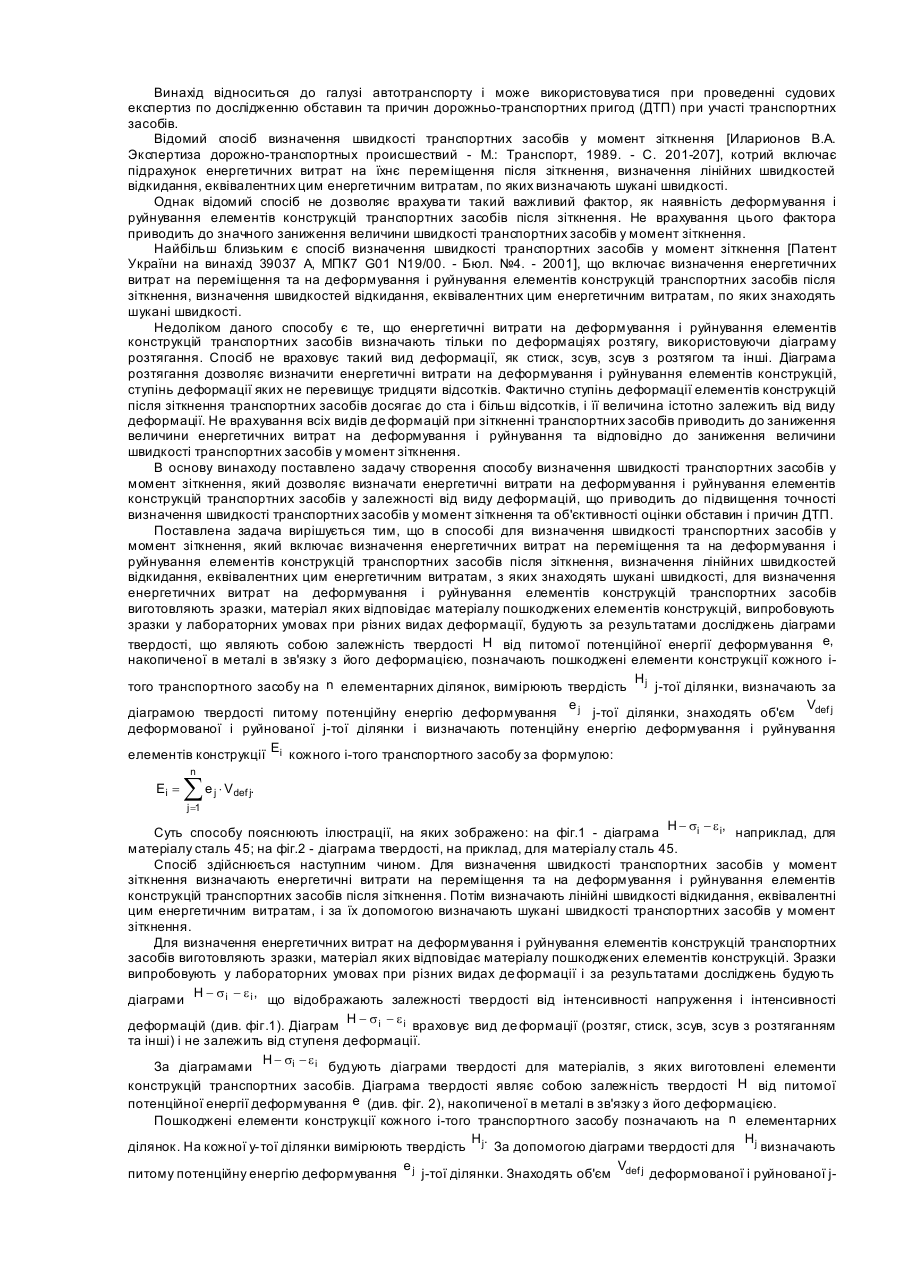
Спосіб визначення швидкості транспортних засобів у момент зіткнення, який включає визначення енергетичних витрат на переміщення та на деформування і руйнування елементів конструкцій транспортних засобів після зіткнення, визначення лінійних швидкостей відкидання, еквівалентних цим енергетичним витратам, з яких знаходять шукані швидкості, який відрізняється тим, що для визначення енергетичних витрат на деформування і руйнування елементів...
Спосіб визначення стійкості деревини проти ударного контактного зминання
Номер патенту: 23923
Опубліковано: 11.06.2007
Автор: КОТРЕЧКО ОЛЕКСІЙ ОЛЕКСІЙОВИЧ
МПК: G01N 3/00
Мітки: визначення, зминання, деревини, стійкості, контактного, ударного, спосіб
Формула / Реферат:
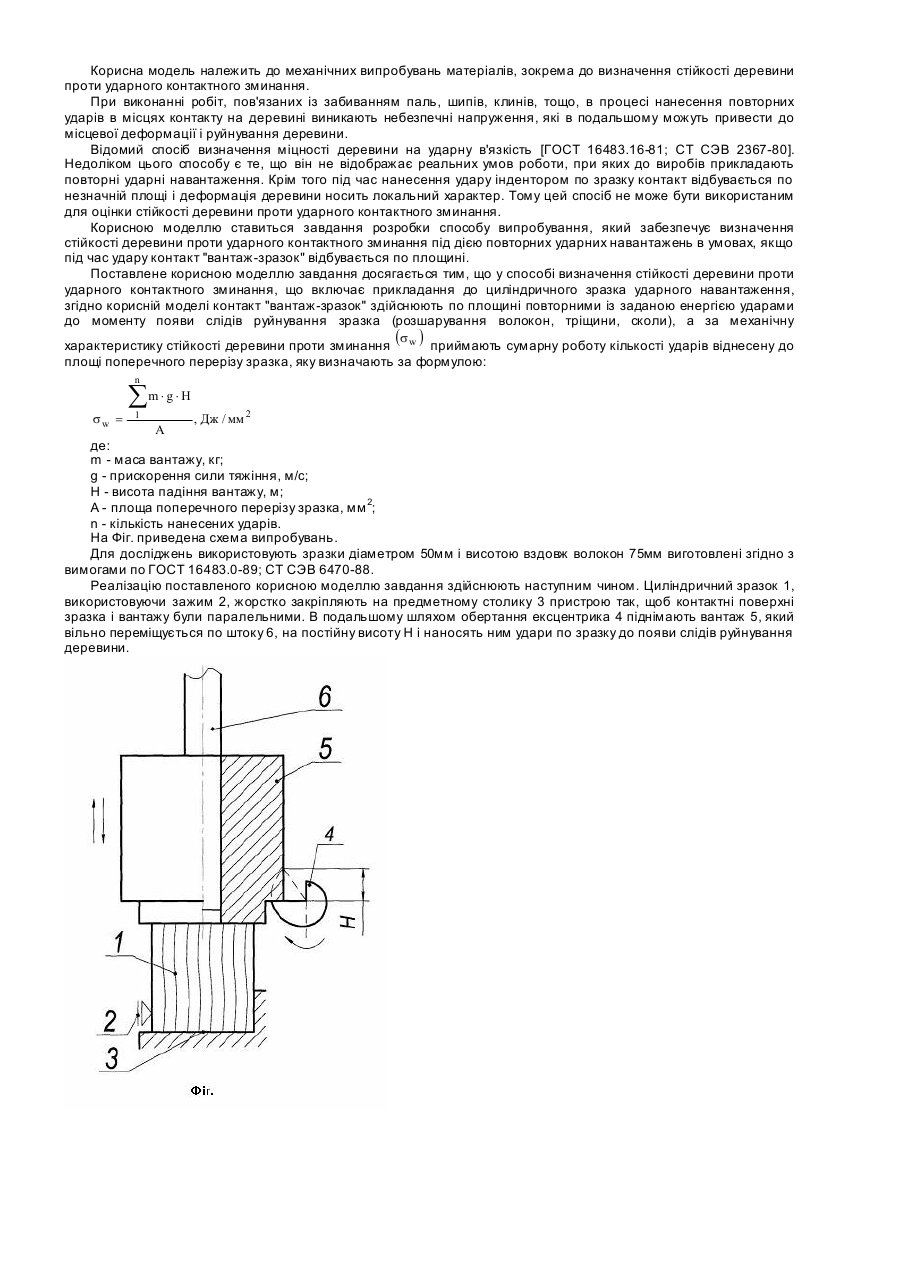
Спосіб визначення стійкості деревини проти ударного контактного зминання, що включає прикладання до циліндричного зразка ударного навантаження, який відрізняється тим, що контакт “вантаж-зразок” здійснюють по площині повторними із заданою енергією ударами до моменту появи слідів руйнування зразка, а за механічну характеристику стійкості деревини проти зминання () приймають...
Спосіб визначення величини холодного контактного електричного опору
Номер патенту: 42414
Опубліковано: 15.10.2001
Автор: Білобородченко Володимир Іванович
МПК: G01K 7/02, B23K 11/02
Мітки: контактного, холодного, визначення, спосіб, опору, величини, електричного
Формула / Реферат:
Спосіб визначення величини холодного контактного електричного опору, в якому задають зусилля стискання P01=1 ДаН, затискаючи деталі між електродами зварювального пристрою, вимірюють величину холодного контактного електричного опору R01, а далі збільшують зусилля стискання до наперед заданого значення P0j і вимірюють відповідне до нього значення холодного контактного електричного опору R0j та визначають величину a - зв'язкового параметру між...
Спосіб визначення швидкості росту тріщин в матеріалах
Номер патенту: 65906
Опубліковано: 15.04.2004
Автори: Філоненко Сергій Федорович, Калита Віктор Михайлович, Бабак Віталій Павлович
МПК: G01P 15/00, G01N 29/14, G01N 29/06
Мітки: тріщин, швидкості, росту, спосіб, матеріалах, визначення
Формула / Реферат:
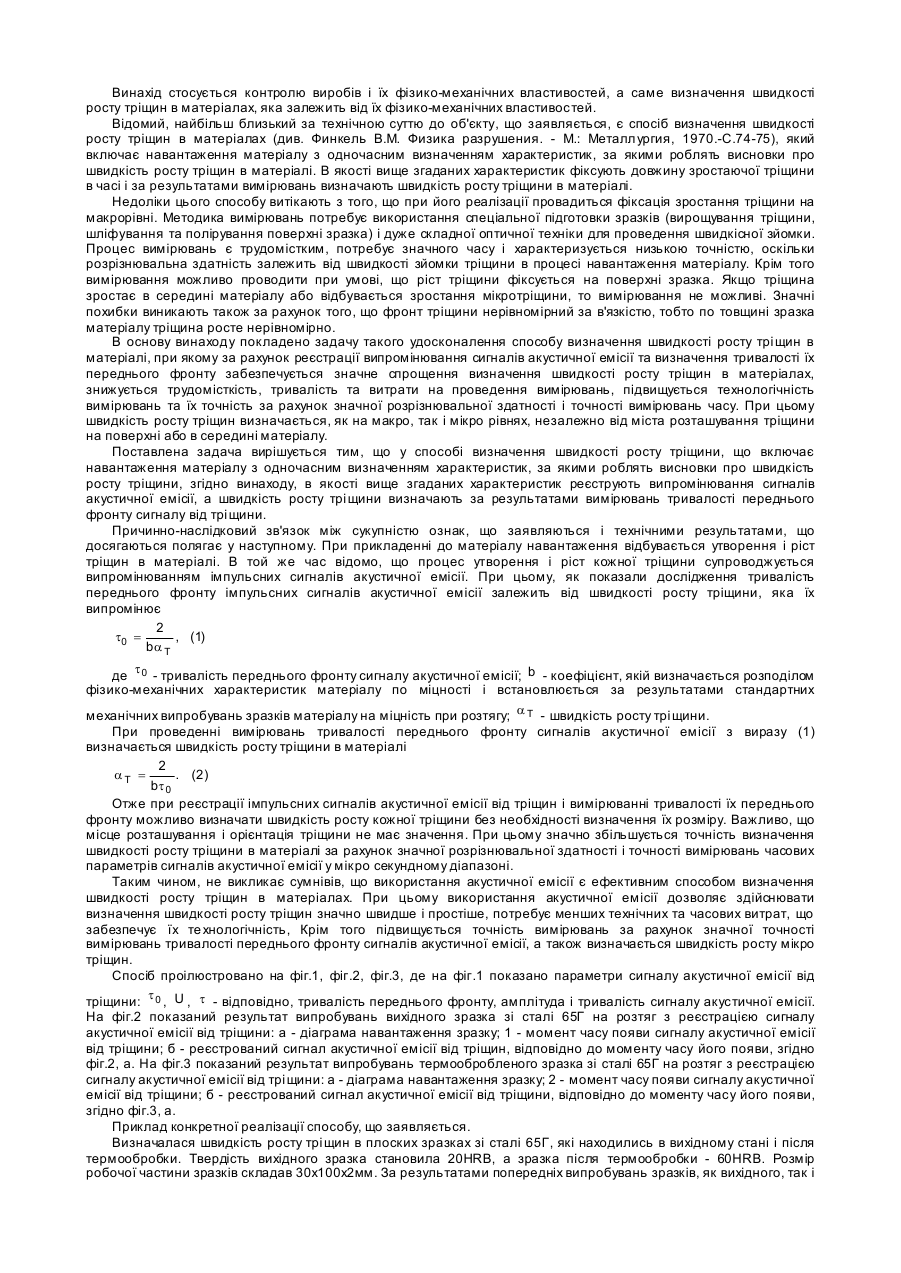
Спосіб визначення швидкості росту тріщин в матеріалах, що включає навантаження матеріалу з одночасним визначенням характеристик, за якими роблять висновки про швидкість росту тріщин в матеріалі, який відрізняється тим, що як вищезгадані характеристики реєструють випромінювання сигналів акустичної емісії, а швидкість росту тріщин визначають за тривалістю переднього фронту сигналів акустичної емісії від тріщин.
Попередній патент: Спосіб обробки діелектричних паливно-мастильних матеріалів
Наступний патент: Лінія отримання та доробки насіння овоче-баштанних культур
Випадковий патент: Пристрій для виміру температури