Відмовостійкий блок акселерометрів
Номер патенту: 36546
Опубліковано: 27.10.2008
Автори: Аблаєв Тімур Асанович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Златкін Олег Юрійович


Формула / Реферат
Відмовостійкий блок акселерометрів, що складається з акселерометрів, три з яких розташовані у вигляді правильної трикутної піраміди, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що четвертий акселерометр розташований по діагоналі куба на відстані ![]() , де
, де ![]() - відстань від центру системи до інших акселерометрів, для зменшення малогабаритних характеристик виходи акселерометрів послідовно через аналого-цифрові перетворювачі, блок діагностування підключені до блока формування кутових швидкостей.
- відстань від центру системи до інших акселерометрів, для зменшення малогабаритних характеристик виходи акселерометрів послідовно через аналого-цифрові перетворювачі, блок діагностування підключені до блока формування кутових швидкостей.
Текст
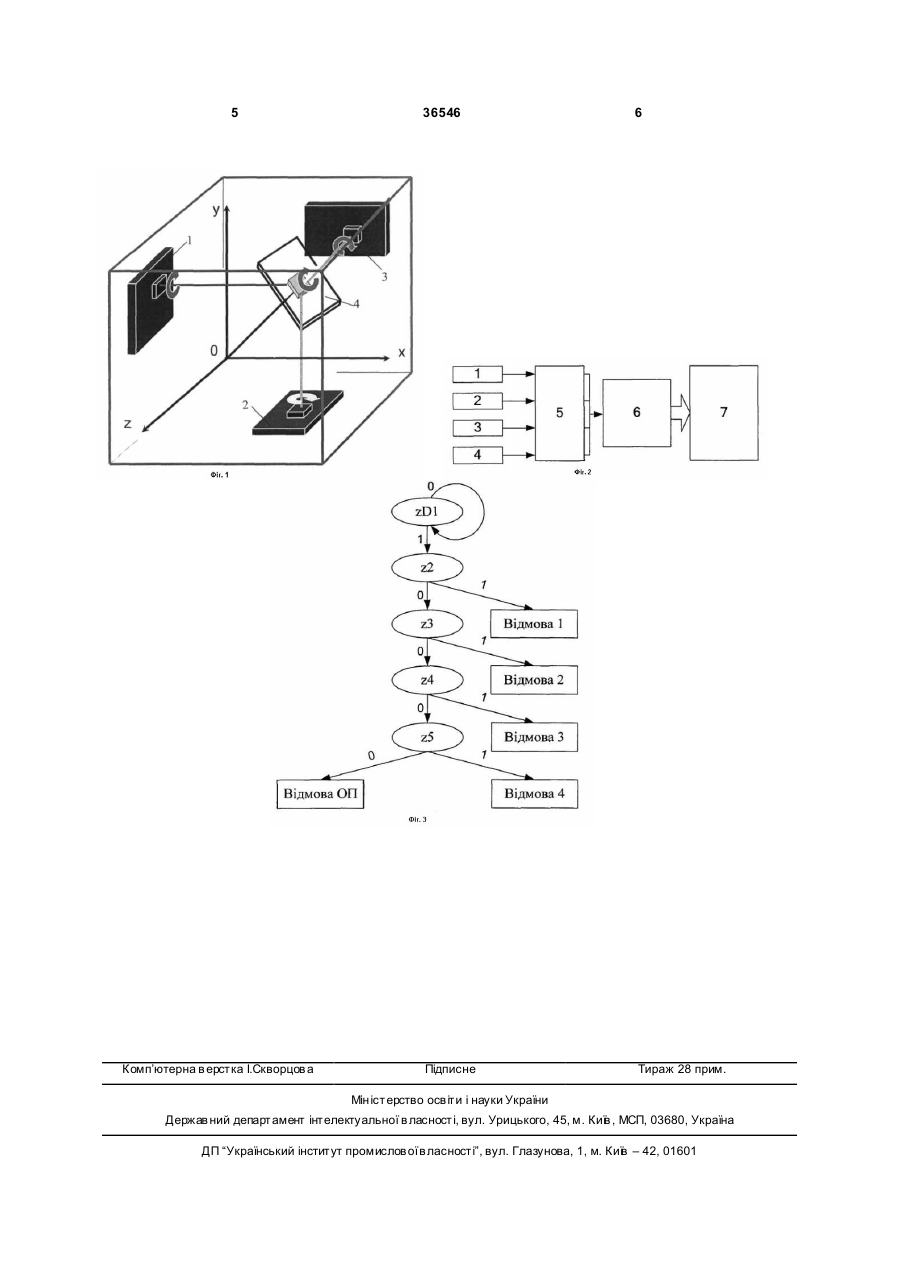
Відмовостійкий блок акселерометрів, що складається з акселерометрів, три з яких розта шовані у вигляді правильної трикутної піраміди, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняє ться тим, що четвертий акселерометр Корисна модель належить до систем орієнтації та навігації рухомих об'єктів і може бути використана в авіаційній техніці. Відомий відмовостійкий блок акселерометрів, що складається з шістьох акселерометрів [Алешкін В.В., Алешкін М.В., Сокольский А.С., Мотвєєв А.С.. Дослідження алгоритмічної обробки інформації надлишкового блоку мікроме-ханічних акселерометрів. // Електроніка й приладобудування. - 2007. - Вип. №1(21). - с. 96105.], узятий як прототип. В ньому використовується структурна надмірність, яка є ефективним способом підвищення надійності й точності систем управління рухомими об'єктами. До недоліків такої системи належать значні масогабаритні характеристики, які не дозволяють використовува ти її на безпілотних малогабаритних літальних апаратах, а також низька їхня надійність і точність. Завданням корисної моделі є зменшення масогабаритних характеристик та підвищення надійності. Поставлене завдання вирішується тим, що в відмовостійкому блоці акселерометрів, що складається з акселерометрів, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, відповідно до корисної моделі, введений четвертий акселерометр, розташований ключені до блоку формування кутови х швидкостей. Суть корисної моделі пояснюється кресленнями, де на фіг. 2 показана блок-схема відмовостійкого блоку акселерометрів, на фіг. 3 представлений фрагмент дихотомічного дерева визначення місця відмови в блоці. Пропонований варіант блоку акселерометрів із структурною надмірністю складається із чотирьох акселерометрів 1, 2, 3 та 4, які послідовно підключені через аналого-цифровий перетворювач 5, блок діагностування 6 до блоку формування кутових швидкостей 7. Відмовостійкий блок працює таким чином. Для простоти пояснення переваги запропонованої конфігурації припустимо, що центр вимірювального тригранника збігається із центром мас БПЛА. Осі чутливості 1,2 3 збігаються з осями пов'язаної із БПЛА системою координат Ох, О у, Oz відповідно. Три акселерометра розташовуються на відстані R від початку системи координат. Вісь чутливості акселерометра 4 збігаються з діагоналлю куба утвореного осями чутливості 1, 2, 3, відповідно. Акселерометри 4 розташовані на відстані по діагоналі куба на відстані 3R , де R - відстань від центру системи до інших акселерометрів, виходи акселерометрів послідовно через аналогоцифрові перетворювачі, блок діагностування під 3R від початку координат. З огляду на розташування ЧЕ (фіг. 1) і вплив на показання проекцій кутової швидкості на осі зв'язаної системи координат, значення вихідних сигналів 1, 2, З будуть визначатися наступними рівняннями: (1) w¢х (k ) = w х (k ) (19) UA (11) 36546 (13) U розташований по діагоналі куба на відстані 3R , де R - відстань від центру системи до інших акселерометрів, для зменшення малогабаритних характеристик виходи акселерометрів послідовно через аналого-цифрові перетворювачі, блок діагностування підключені до блока формування кутови х швидкостей. 3 36546 w¢y (k ) = w y (k ) (2) w¢z (k ) = wz (k ) (3) w ,w , w де х y z - проекції кутової швидкості обертання на осі зв'язаної системи координат, ¢ w¢х , w¢y , wz - значення вихідних сигналів 1, 2 3 відповідно; k - дискретні моменти часу виміру. Для простоти запису рівнянь крок квантування будемо опускати. Через те що осі чутливості 4 збігаються з діагоналлю куба (фіг. 1), то їхні показання будуть визначатися наступною залежністю: 1 w¢0 (k ) = wx (k ) + w y (k ) + w z (k ) (4) 3 0 де w¢ (k ) - значення вихідного сигналу 4. ( ) 4 ної системи передбачене місце для збереження поточної інформації на певному діапазоні часу із кроком квантування Т0 = 0,001с. Дані зберігаються за принципом «черговий входить і виходить». Це необхідно для того, щоб у пам'яті зберігалися дані з акселерометрів до моменту виникнення відмови в блоці («чисті дані»). При виникненні відмови, система діагностування на підставі предикатного рівняння (7) визначає момент часу виникнення відмови to і наступні дані зберігаються в пам'яті як «брудні» - дані отримані з блоку, у якому відбулася відмова. Таким чином, система має у своєму розпорядженні дані з акселерометрів до моменту виникнення відмови й після. Для акселерометрів вихідну напругу можна представити в наступному виді при наявності відмови U((k - 1)T0 ) ¹ U(kT0 ) , тобто На виході акселерометрів формується сигнал abs(U((k - 1)T0 ) - U(kT0 )) > D ¹ 0 або у вигляді напруги постійного струму. На підставі U((k - 1)T0 ) цього введемо наступні позначення: = U(kT0 ) ± x ; а при відсутності відмови U1(k ), U2 (k), U3 (k ), U4 (k ) - значення напруг на ви хоU((k - 1)T0 ) » U(kT0 ) . Відповідно до висловлених дах акселерометрів 1, 2, З, відповідно в k-й моприпущень предикатне рівняння для визначення мент часу. Через те що в блоці використовуються місця відмови в блоці прийме наступний вид: однотипні акселерометри, то рівняння (4) з ураху0, ні ì ванням введених позначень приймуть наступний (8) z1 = s2 U1 (kT0 ) - U1 ((k - 1)T0 ) £ d1 = í 1, відмова1 вигляд: î 1 0, ні ì U4 (k ) = (U1(k ) + U2 (k ) + U3 (k )) (5) (9) z2 = s2 U2 (kT0 ) - U2 ((k - 1)T0 ) £ d2 = í 3 î1, відмова 2 Тотожність (5) являє собою математичну мо0, ні ì дель номінального функціонування блоку акселе(10) z3 = s2 U3 (kT0 ) - U3 ((k - 1)T0 ) £ d3 = í рометрів БПЛА. 1, відмова3 î На підставі тотожності (5) отримаємо діагнос0, ні ì тичну модель для вирішення першого завдання (11) z4 = s 2 U4 (kT0 ) - U4 ((k - 1)T0 ) £ d4 = í 1, відмова 4 діагностування, виявлення відмов у блоці. î Отримані предикатні рівняння (8) - (11) відо~ 1 ~ ~ ~ DU4 (k ) = U4 (k ) U1(k ) + U2 (k) + U3 (k ) (6) бражають якісний зв'язок місця виникнення відмо3 ви з непрямими ознаками в термінах булевої змінDU4 (k ) - ухилення сумарних напруг на 1, 2, ної. Використання цієї обставини дозволяє де представити рішення завдань діагностування у ~ ~ ~ формі дихотомічного дерева, що дозволяє пере3 від напруги на 4,; U1(k ), U2 (k ), U3 (k ) - напруги на йти до рішення важливого завдання при побудові виходах акселерометрів 1, 2 3, 4 в k-й момент чадіагностичного забезпечення - побудові правил су, відповідно. пошуку місця відмов (ППМ) у блоці акселерометНа підставі отриманої діагностичної моделі (6) рів. Рішення цього завдання засновано на одерформуємо предикатне рівняння: жанні безумовних ППМ. 1 (7) zi = s 2 DU 4 (k ) £ di }0 Отримані ППМ (див. фіг. 3) являють собою фрагмент логічного графа пошуку місця відмови, у z i - двозначний предикат, що описує проде вузлах якого перебувають двозначні предикати (8) - (11), значення яких визначаємо через доступні s 2 - символ двоцес порівняння значень напруг; виміру характеристики датчиків БПЛА. Розроблене діагностичне забезпечення (див. значного предикатного рівняння; di - допустиме фіг. 3) у рамках сигнально-параметричного підходу значення неузгодженості сигналів, визначене додозволяє вирішувати два найбільш важливих заслідним шляхом. вдання діагностування технічного стану блоку акОтримане предикатне рівняння (7) дозволяє селерометрів БПЛА - установлення факту виниксформувати алгоритм для вирішення першого нення відмови в блоці і визначення місця його завдання діагностування, виявлення відмови в виникнення. блоці. Таким чином, поставлені завдання повністю Після вирішення першого завдання діагностивирішуються. Корисна модель дозволяє підвищити чного забезпечення необхідно зняти наступну неточність і надійність блоку акселерометрів щодо визначеність — місце виникнення відмови в блоці, використання в системах орієнтації на малогабатобто визначення безпосередньо акселерометра, ритних літальних апаратах. що відмовив. Для реалізації алгоритмів визначення місця відмови в блоці у пам'яті мікропроцесор { } { { { ) } { ( } } 5 Комп’ютерна в ерстка І.Скворцов а 36546 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFailure-resistant accelerometer block
Автори англійськоюKulik Anatolii Stepanovych, Firsov Serhii Mykolaiovych, Zlatkin Oleh Yuriiovych, Ablaiev Timur Asanovych
Назва патенту російськоюОтказоустойчивый блок акселерометров
Автори російськоюКулик Анатолий Степанович, Фирсов Сергей Николаевич, Златкин Олег Юрьевич, Аблаев Тимур Асанович
МПК / Мітки
МПК: G01C 21/00
Мітки: відмовостійкий, блок, акселерометрів
Код посилання
<a href="https://ua.patents.su/3-36546-vidmovostijjkijj-blok-akselerometriv.html" target="_blank" rel="follow" title="База патентів України">Відмовостійкий блок акселерометрів</a>
Відмовостійкий блок датчиків кутових швидкостей
Номер патенту: 36480
Опубліковано: 27.10.2008
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Златкін Олег Юрійович, Пилев Михайло Юрійович, Бандура Іван Миколайович
МПК: G01C 21/00
Мітки: кутових, відмовостійкий, датчиків, швидкостей, блок
Формула / Реферат:
Відмовостійкий блок датчиків кутових швидкостей, що складається з датчиків кутових швидкостей, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що додатково введений четвертий датчик кутової швидкості, розташований по діагоналі куба на відстані , де R - відстань від центру системи до інших датчиків, виходи...
Автоматизована система розробки діагностичного забезпечення
Номер патенту: 25484
Опубліковано: 10.08.2007
Автори: Матяш Ольга Анатоліївна, Гавриленко Олена Володимирівна, Гавриленко Олег Іванович, Резнікова Ольга Вікторівна
МПК: G06F 15/00
Мітки: система, діагностичного, автоматизована, забезпечення, розробки
Формула / Реферат:
Автоматизована система розробки діагностичного забезпечення, що містить інформаційну шину, формувач діагностичної моделі, блок пам'яті, блок одержання оцінок діагностичних ознак, блок моделювання номінального процесу, аналізатор відхилень ознак, аналізатор швидкості відхилень ознак, блок допускового контролю, блок пам'яті, аналізатор місця відмов, вихідну шину, причому виходи першого блока пам'яті з'єднані з першою групою блока допускового...
Безплатформний інерціальний блок

Номер патенту: 35089
Опубліковано: 26.08.2008
Автори: Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Апоян Армен Генрікович, Субота Анатолій Максимович, Златкін Олег Юрьєвич
МПК: G01C 21/00
Мітки: блок, безплатформний, інерціальній
Формула / Реферат:
Безплатформний інерціальний вимірювальний блок, що містить основу, на котрій розміщені гіроскопи, акселерометри, джерела струму, сервісні електронні блоки, який відрізняється тим, що відносно кожної ортогональної осі установлено по мікромеханічному акселерометру, осі чутливості яких співпадають з названими осями, і три мікромеханічні двовісні датчики кутової швидкості, осі чутливості першого з них паралельні осям Х і Y, другого - осям Y і Z,...
Блок відмовостійких сервоприводів для каналу тангажа
Номер патенту: 36467
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/08
Мітки: каналу, сервоприводів, відмовостійких, тангажа, блок
Формула / Реферат:
Блок відмовостійких сервоприводів для каналу тангажа, що містить двигун-маховик, керуючий вхід, групу інформаційних виходів, який відрізняється тим, що містить другий двигун-маховик, другий керуючий вхід, два аналого-цифрових перетворювачі, генератор видів відмов, два імітатори видів відмов, блок діагностування видів відмов, блок відновлення працездатності, дві шини керування, причому виходи давачів першого двигуна-маховика з'єднані з входами...
Блок відмовостійких давачів для каналу тангажа
Номер патенту: 36468
Опубліковано: 27.10.2008
Автор: Кулік Анатолій Степанович
МПК: G05D 1/08
Мітки: давачів, тангажа, блок, каналу, відмовостійких
Формула / Реферат:
Блок відмовостійких давачів для каналу тангажа, що містить давач кута, давач кутової швидкості, групу керуючих входів, групу інформаційних виходів, який відрізняється тим, що містить другий давач кутової швидкості, три аналого-цифрових перетворювачі, три імітатори видів відмов, генератор видів відмов, блок діагностування видів відмов, другу групу керуючих входів, блок відновлення сигналів, другу та третю групи інформаційних виходів, причому...
Попередній патент: Портативний пристрій для гідроколонотерапії
Наступний патент: Запобіжна вибухова речовина
Випадковий патент: Спосіб об'єктивізації розміру матки при поєднанні внутрішнього ендометріозу з міомою матки