Робочий орган радіокерованого електровізка транспортної системи
Номер патенту: 37597
Опубліковано: 10.12.2008
Автори: Лаврів Павло Юркович, Ощипок Ігор Миколайович, Кравців Роман Йосипович, Лаврів Віталій Павлович

Формула / Реферат
1. Робочий орган радіокерованого електровізка транспортної системи, що містить раму, електродвигун задньої ведучої осі, редуктор задньої ведучої осі, гальмо, механізм фіксації, хрестоподібні затискачі, напрямні, квадратного перерізу палець, пружини стискування, конусоподібні зуби, розвантажувальний пристрій, блок-суматор розвантажень, ікла розвантажувального пристрою, який відрізняється тим, що додатково містить механічну систему шасі, з'єднану з передньою підтримуючою регулюючою віссю із встановленими тягами повороту, електродвигун передньої підтримуючої регулюючої осі, з'єднаний із редуктором передньої підтримуючої регулюючої осі, акумуляторну батарею 12V-6CT 90, електропроводи живлення, приймач радіокерування, рухомі бампери, індикатор зупинки руху на фотоелементах, індикатор рівня та маси, кузов у формі ємності із конусоподібними виробленими повздовжніми краями, циліндричну напрямну та радіодистанційний пульт керування.
2. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що кузов виконаний у формі ємності із конусоподібними виробленими повздовжніми краями, з можливістю перевезення на вішаках готової продукції молочних та м'ясо-ковбасних виробів.
3. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що в механізмі фіксації зменшений кут кріплення хрестовинних затискачів з можливістю забезпечення кращої стійкості до кріплення ємності різної ваги через конусоподібні зуби.
4. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що розвантажувальний пристрій встановлений на рамі під ємністю з можливістю розмикання механізму фіксації і повернення його у вихідне положення після розвантаження.
5. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що індикатор маси розміщений під ємністю, індикатор рівня розташований на стояку ємності, а приймач радіокерування рухом зафіксований на рамі із встановленими фотоелементами з можливістю одержання інформації від вказаних індикаторів при завантаженні і розвантаженні та радіокеруванні робочим органом.
6. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що система шасі забезпечена гумовими колесами, розміщеними на передній підтримуючій і задній ведучій осях, з можливістю пересування його по підлозі приміщення та зниження шуму і вібраційних впливів на продукцію, яка перевозиться в ньому.
7. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що механізм електрорадіокеруваня розміщений на рамі, з'єднаний із механічною системою шасі з можливістю керування рухом (праворуч чи ліворуч, вперед або назад).
Текст
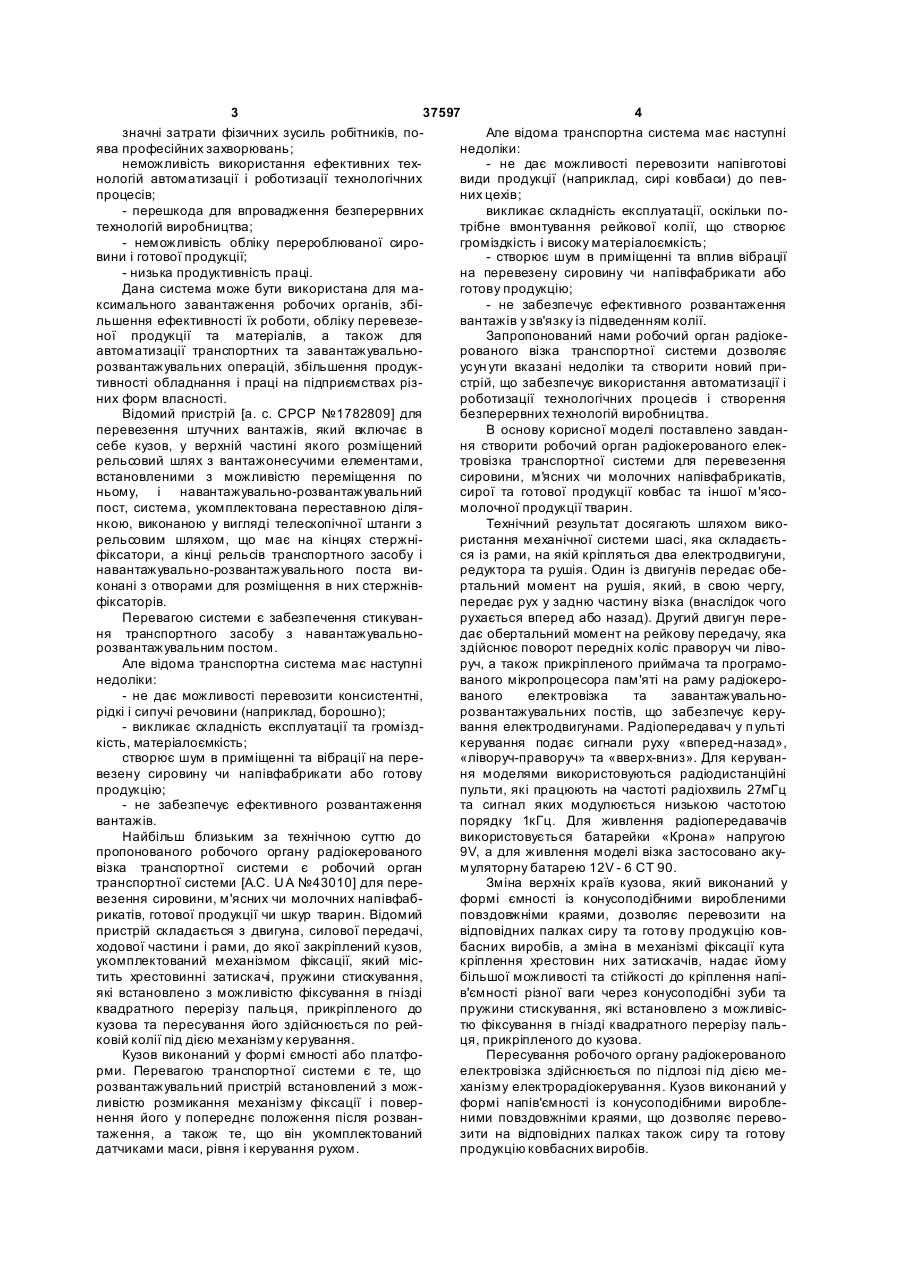
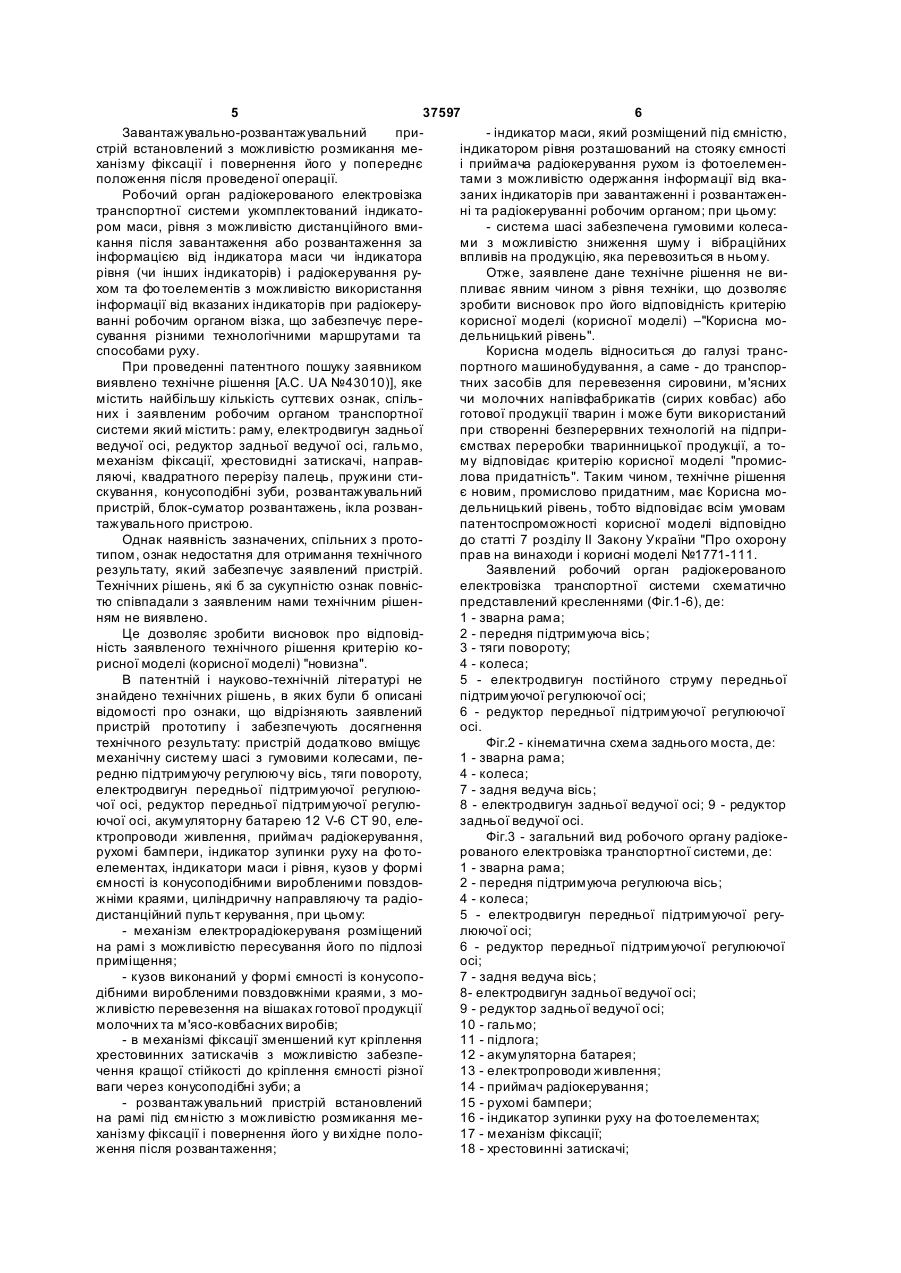
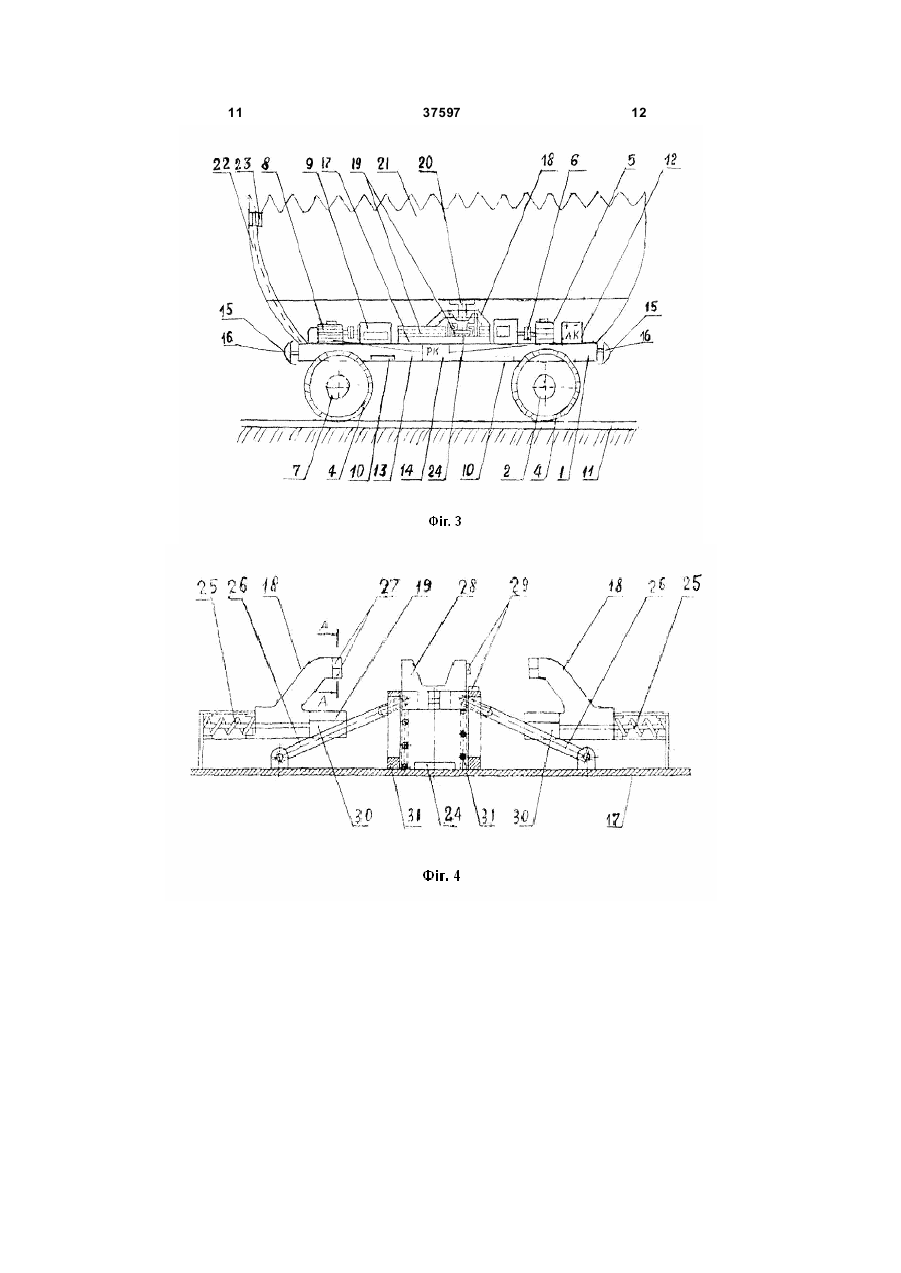
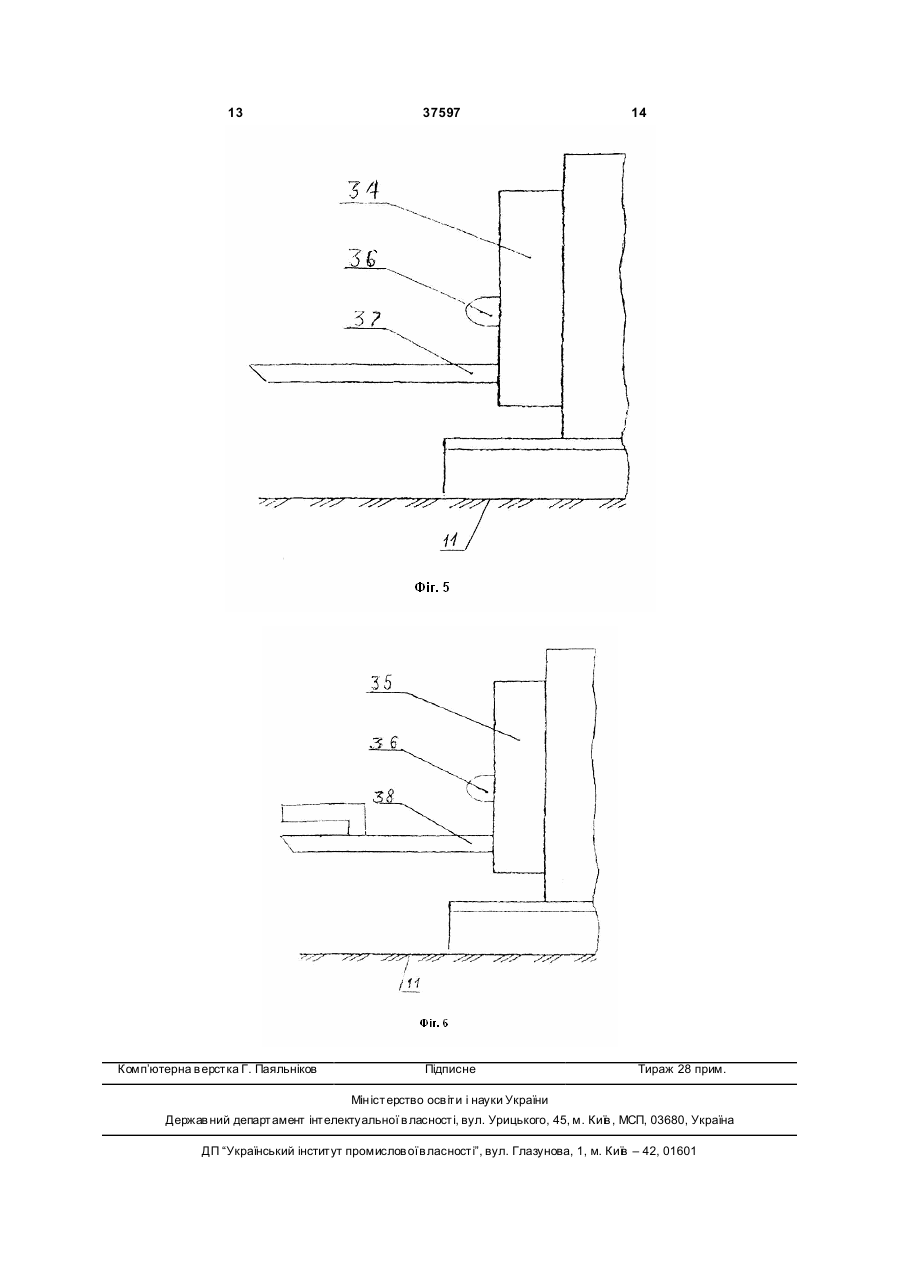
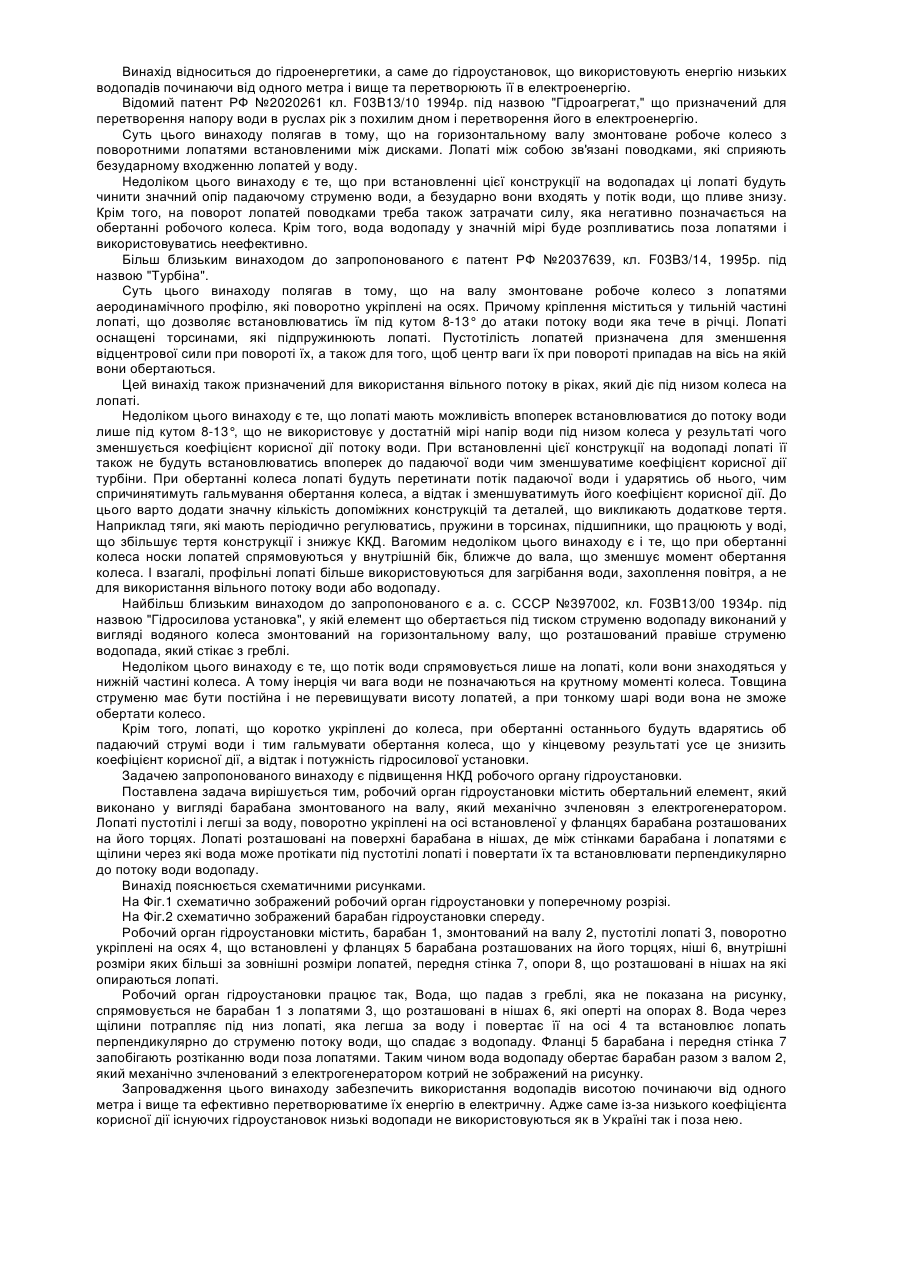
1. Робочий орган радіокерованого електровізка транспортної системи, що містить раму, електродвигун задньої ведучої осі, редуктор задньої ведучої осі, гальмо, механізм фіксації, хрестоподібні затискачі, напрямні, квадратного перерізу палець, пружини стискування, конусоподібні зуби, розвантажувальний пристрій, блок-суматор розвантажень, ікла розвантажувального пристрою, який відрізняє ться тим, що додатково містить механічну систему шасі, з'єднану з передньою підтримуючою регулюючою віссю із встановленими тягами повороту, електродвигун передньої підтримуючої регулюючої осі, з'єднаний із редуктором передньої підтримуючої регулюючої осі, акумуляторну батарею 12V-6CT 90, електропроводи живлення, приймач радіокерування, рухомі бампери, індикатор зупинки руху на фотоелементах, індикатор рівня та маси, кузов у формі ємності із конусоподібними виробленими повздовжніми краями, циліндричну напрямну та радіодистанційний пульт керування. 2. Робочий орган радіокерованого електровізка транспортної системи за п. 1, який відрізняється тим, що кузов виконаний у формі ємності із конусоподібними виробленими повздовжніми краями, з можливістю перевезення на вішаках готової продукції молочних та м'ясо-ковбасних виробів. U 2 (11) 1 3 37597 4 значні затрати фізичних зусиль робітників, поАле відома транспортна система має наступні ява професійних захворювань; недоліки: неможливість використання ефективних тех- не дає можливості перевозити напівготові нологій автоматизації і роботизації технологічних види продукції (наприклад, сирі ковбаси) до певпроцесів; них цехів; - перешкода для впровадження безперервних викликає складність експлуатації, оскільки потехнологій виробництва; трібне вмонтування рейкової колії, що створює - неможливість обліку перероблюваної сирогроміздкість і високу матеріалоємкість; вини і готової продукції; - створює шум в приміщенні та вплив вібрації - низька продуктивність праці. на перевезену сировину чи напівфабрикати або Дана система може бути використана для маготову продукцію; ксимального завантаження робочих органів, збі- не забезпечує ефективного розвантаження льшення ефективності їх роботи, обліку перевезевантажів у зв'язку із підведенням колії. ної продукції та матеріалів, а також для Запропонований нами робочий орган радіокеавтоматизації транспортних та завантажувальнорованого візка транспортної системи дозволяє розвантажувальних операцій, збільшення продукусун ути вказані недоліки та створити новий притивності обладнання і праці на підприємствах різстрій, що забезпечує використання автоматизації і них форм власності. роботизації технологічних процесів і створення Відомий пристрій [а. с. СРСР №1782809] для безперервних технологій виробництва. перевезення штучних вантажів, який включає в В основу корисної моделі поставлено завдансебе кузов, у верхній частині якого розміщений ня створити робочий орган радіокерованого елекрельсовий шлях з вантажонесучими елементами, тровізка транспортної системи для перевезення встановленими з можливістю переміщення по сировини, м'я сних чи молочних напівфабрикатів, ньому, і навантажувально-розвантажувальний сирої та готової продукції ковбас та іншої м'ясопост, система, укомплектована переставною ділямолочної продукції тварин. нкою, виконаною у вигляді телескопічної штанги з Технічний результат досягають шляхом викорельсовим шляхом, що має на кінцях стержніристання механічної системи шасі, яка складаєтьфіксатори, а кінці рельсів транспортного засобу і ся із рами, на якій кріпляться два електродвигуни, навантажувально-розвантажувального поста виредуктора та рушія. Один із двигунів передає обеконані з отворами для розміщення в них стержнівртальний момент на рушія, який, в свою чергу, фіксаторів. передає рух у задню частину візка (внаслідок чого Перевагою системи є забезпечення стикуванрухається вперед або назад). Другий двигун переня транспортного засобу з навантажувальнодає обертальний момент на рейкову передачу, яка розвантажувальним постом. здійснює поворот передніх коліс праворуч чи лівоАле відома транспортна система має наступні руч, а також прикріпленого приймача та програмонедоліки: ваного мікропроцесора пам'яті на раму радіокеро- не дає можливості перевозити консистентні, ваного електровізка та завантажувальнорідкі і сипучі речовини (наприклад, борошно); розвантажувальних постів, що забезпечує керу- викликає складність експлуатації та громіздвання електродвигунами. Радіопередавач у п ульті кість, матеріалоємкість; керування подає сигнали руху «вперед-назад», створює шум в приміщенні та вібрації на пере«ліворуч-праворуч» та «вверх-вниз». Для керуванвезену сировину чи напівфабрикати або готову ня моделями використовуються радіодистанційні продукцію; пульти, які працюють на частоті радіохвиль 27мГц - не забезпечує ефективного розвантаження та сигнал яких модулюється низькою частотою вантажів. порядку 1кГц. Для живлення радіопередавачів Найбільш близьким за технічною суттю до використовується батарейки «Крона» напругою пропонованого робочого органу радіокерованого 9V, а для живлення моделі візка застосовано акувізка транспортної системи є робочий орган муляторну батарею 12V - 6 СТ 90. транспортної системи [А.С. U A №43010] для переЗміна верхніх країв кузова, який виконаний у везення сировини, м'ясних чи молочних напівфабформі ємності із конусоподібними виробленими рикатів, готової продукції чи шкур тварин. Відомий повздовжніми краями, дозволяє перевозити на пристрій складається з двигуна, силової передачі, відповідних палках сиру та гото ву продукцію ковходової частини і рами, до якої закріплений кузов, басних виробів, а зміна в механізмі фіксації кута укомплектований механізмом фіксації, який міскріплення хрестовин них затискачів, надає йому тить хрестовинні затискачі, пружини стискування, більшої можливості та стійкості до кріплення напіякі встановлено з можливістю фіксування в гнізді в'ємності різної ваги через конусоподібні зуби та квадратного перерізу пальця, прикріпленого до пружини стискування, які встановлено з можливіскузова та пересування його здійснюється по рейтю фіксування в гнізді квадратного перерізу пальковій колії під дією механізму керування. ця, прикріпленого до кузова. Кузов виконаний у формі ємності або платфоПересування робочого органу радіокерованого рми. Перевагою транспортної системи є те, що електровізка здійснюється по підлозі під дією мерозвантажувальний пристрій встановлений з можханізму електрорадіокерування. Кузов виконаний у ливістю розмикання механізму фіксації і поверформі напів'ємності із конусоподібними виробленення його у попереднє положення після розванними повздовжніми краями, що дозволяє перевотаження, а також те, що він укомплектований зити на відповідних палках також сиру та готову датчиками маси, рівня і керування рухом. продукцію ковбасних виробів. 5 37597 6 Завантажувально-розвантажувальний при- індикатор маси, який розміщений під ємністю, стрій встановлений з можливістю розмикання меіндикатором рівня розташований на стояку ємності ханізму фіксації і повернення його у попереднє і приймача радіокерування рухом із фотоелеменположення після проведеної операції. тами з можливістю одержання інформації від вкаРобочий орган радіокерованого електровізка заних індикаторів при завантаженні і розвантажентранспортної системи укомплектований індикатоні та радіокеруванні робочим органом; при цьому: ром маси, рівня з можливістю дистанційного вми- система шасі забезпечена гумовими колесакання після завантаження або розвантаження за ми з можливістю зниження шуму і вібраційних інформацією від індикатора маси чи індикатора впливів на продукцію, яка перевозиться в ньому. рівня (чи інших індикаторів) і радіокерування руОтже, заявлене дане технічне рішення не вихом та фо тоелементів з можливістю використання пливає явним чином з рівня техніки, що дозволяє інформації від вказаних індикаторів при радіокерузробити висновок про його відповідність критерію ванні робочим органом візка, що забезпечує перекорисної моделі (корисної моделі) –"Корисна мосування різними технологічними маршрутами та дельницький рівень". способами руху. Корисна модель відноситься до галузі трансПри проведенні патентного пошуку заявником портного машинобудування, а саме - до транспорвиявлено технічне рішення [А.С. UA №43010)], яке тних засобів для перевезення сировини, м'ясних містить найбільшу кількість суттєвих ознак, спільчи молочних напівфабрикатів (сирих ковбас) або них і заявленим робочим органом транспортної готової продукції тварин і може бути використаний системи який містить: раму, електродвигун задньої при створенні безперервних технологій на підприведучої осі, редуктор задньої ведучої осі, гальмо, ємствах переробки тваринницької продукції, а томеханізм фіксації, хрестовидні затискачі, направму відповідає критерію корисної моделі "промисляючі, квадратного перерізу палець, пружини стилова придатність". Таким чином, технічне рішення скування,конусоподібні зуби, розвантажувальний є новим, промислово придатним, має Корисна мопристрій, блок-суматор розвантажень, ікла розвандельницький рівень, тобто відповідає всім умовам тажувального пристрою. патентоспроможності корисної моделі відповідно Однак наявність зазначених, спільних з протодо статті 7 розділу II Закону України "Про охорону типом, ознак недостатня для отримання технічного прав на винаходи і корисні моделі №1771-111. результату, який забезпечує заявлений пристрій. Заявлений робочий орган радіокерованого Технічних рішень, які б за сукупністю ознак повніселектровізка транспортної системи схематично тю співпадали з заявленим нами технічним рішенпредставлений кресленнями (Фіг.1-6), де: ням не виявлено. 1 - зварна рама; Це дозволяє зробити висновок про відповід2 - передня підтримуюча вісь; ність заявленого технічного рішення критерію ко3 - тяги повороту; рисної моделі (корисної моделі) "новизна". 4 - колеса; В патентній і науково-технічній літературі не 5 - електродвигун постійного струму передньої знайдено технічних рішень, в яких були б описані підтримуючої регулюючої осі; відомості про ознаки, що відрізняють заявлений 6 - редуктор передньої підтримуючої регулюючої пристрій прототипу і забезпечують досягнення осі. технічного результату: пристрій додатково вміщує Фіг.2 - кінематична схема заднього моста, де: механічну систему шасі з гумовими колесами, пе1 - зварна рама; редню підтримуючу регулюючу вісь, тяги повороту, 4 - колеса; електродвигун передньої підтримуючої регулюю7 - задня ведуча вісь; чої осі, редуктор передньої підтримуючої регулю8 - електродвигун задньої ведучої осі; 9 - редуктор ючої осі, акумуляторну батарею 12 V-6 СТ 90, елезадньої ведучої осі. ктропроводи живлення, приймач радіокерування, Фіг.3 - загальний вид робочого органу радіокерухомі бампери, індикатор зупинки руху на фо торованого електровізка транспортної системи, де: елементах, індикатори маси і рівня, кузов у формі 1 - зварна рама; ємності із конусоподібними виробленими повздов2 - передня підтримуюча регулююча вісь; жніми краями, циліндричну направляючу та радіо4 - колеса; дистанційний пульт керування, при цьому: 5 - електродвигун передньої підтримуючої регу- механізм електрорадіокеруваня розміщений люючої осі; на рамі з можливістю пересування його по підлозі 6 - редуктор передньої підтримуючої регулюючої приміщення; осі; - кузов виконаний у формі ємності із конусопо7 - задня ведуча вісь; дібними виробленими повздовжніми краями, з мо8- електродвигун задньої ведучої осі; жливістю перевезення на вішаках готової продукції 9 - редуктор задньої ведучої осі; молочних та м'ясо-ковбасних виробів; 10 - гальмо; - в механізмі фіксації зменшений кут кріплення 11 - підлога; хрестовинних затискачів з можливістю забезпе12 - акумуляторна батарея; чення кращої стійкості до кріплення ємності різної 13 - електропроводи живлення; ваги через конусоподібні зуби; а 14 - приймач радіокерування; - розвантажувальний пристрій встановлений 15 - рухомі бампери; на рамі під ємністю з можливістю розмикання ме16 - індикатор зупинки руху на фо тоелементах; ханізму фіксації і повернення його у ви хідне поло17 - механізм фіксації; ження після розвантаження; 18 - хрестовинні затискачі; 7 37597 8 19 - направляючі; робочого органу транспортної системи, яка пода20 - квадратного перерізу палець; ється в блок-суматор завантажень та розванта21 - ємність; жень 29, що передає дані про номенклатуру та 22 - стояк індикатора рівня; кількість вантажів визначених в програмі роботи 23 - індикатор рівня; робочого органу транспортної системи. При частій 24 - індикатор маси. зміні виду вантажу (і при неможливості чи складФіг.4 - механізм фіксації в розімкненому, де: ності це запрограмувати заздалегідь) робочим 18 - хрестовинні затискачі; органом радіокерованого електровізка транспорт19 - направляючі; ної системи керують працюючі або оператори. 24 - індикатор маси. Вони з допомогою відповідного приймача ра25 - пружини стискування; діокерування рухом 14 вмикають індикатор радіо26 - тяги; керування 36 біля завантажувально27 - конусоподібні зуби; розвантажувального пристрою 29, де очікується 28 - гніздо; прибуття радіокерованого електровізка з відповід29 - блок-суматор розвантажень; ним вантажем, в режимі очікування. Радіокерова30 - упори тяг ємності; ний електровізок рухається, за заданою програ31 - циліндрична направляюча; мою, і під'їжджає до потрібного завантажувально 32 - пружина гнізда; або розвантажувального пристрою 34 або 35 (Фіг.5 33 - конусоподібні зуби; або 6). Фіг.5 - завантажувальний пристрій для робочоІндикатор радіокерування рухом 36 на фотого органу радіокерованого електровізка транспорелементах зафіксовує прибуття робочого органу тної системи, де: радіокерованого електровізка транспортної систе11 - підлога; ми і сигналізує про це. Внаслідок цього сигналу 34 - завантажувальний пристрій; вимикається привід робочого органу радіокерова36 - індикатор радіокерування рухом; ного електровізка транспортної системи, вмика37 - ікла завантажувального пристрою; ється гальмо і робочий орган транспортної систеФіг.6 - розвантажувальний пристрій для робоми зупиняється. Завантажувальний або чого органу радіокерованого електровізка трансрозвантажувальний пристрій 34 або 35 підводить портної системи, де: ікла 37 або 38 під ємність 21 з вантажем в щілини 11 - підлога; між хрестовинними натискачами 18, ікла 37 або 38 35 - розвантажувальний пристрій; розсовуються (віддаль між ними збільшується. 36 - індикатор радіокерування рухом; Завдяки цьому ікла розтискають хрестовинні зати38 - ікла розвантажувального пристрою. скачі 18. Заявлений робочий орган радіокерованого Після завантаження або розвантаження заваелектровізка транспортної системи працює настунтажувальний 34 або розвантажувальний пристрій пним чином. На рамі 1 з допомогою механізму фік35 встановлює ємність 21 в гніздо 28, яке під масації 17 закріплена ємність для перевезення вансою ємкості 21 опускається, звільняючи хрестотажу 21 з використанням квадратного перерізу винні затискачі 18. Пружини стискування 25 надійпальця 20. При завантаженні робочого органу но фіксують ємість 21 на рамі 1. Ікла транспортної системи до відповідної маси або рівзавантажувального 34 або розвантажувального ня спрацьовує відповідно індикатор маси 24 або пристрою 35 виводяться з-під ємності 21. Робочий індикатор рівня 23. орган радіокерованого електровізка транспортної Від сигналів одного або обидвох індикаторів системи повертається згідно відповідної поданої спрацьовує електродвигун 5 та 8, який через редукоманди під той чи інший пристрій. Якщо на шляху ктори 6 та 9 приводить в рух ведучу 7 та регулююробочого органу радіокерованого електровізка чу вісь 2 робочого органу радіокерованого електтранспортної системи під час руху попадають якісь ровізка транспортної системи. Крутний момент від сторонні предмети, спрацьовує р ухомий бампер осі 7 передається колесам 4 і робочий орган ра15 та при цьому вмикається гальмо 10 для зупинки діокерованого електровізка транспортної системи даного органу. починає рухатись по запрограмованому шляху. Пропонований орган робочий орган радіокеЕлектродвигун 5 та 8 живиться від акумуляторної рованого електровізка транспортної системи добатареї 12. Робочий орган радіокерованого електзволяє здійснювати перевезення консистентних, ровізка транспортної системи працює від команд рідких і сипучи х речовин, а також палки із продукоператора, які йому задаються. Може він також цією ковбасних виробів та здатний працювати в працювати і в автоматизованому режимі. Якщо окладі автоматизованої транспортної системи, з робота робочого органу радіокерованого електровикористанням безперервних найсучасніших ефевізка транспортної системи проходить в автоматиктивних те хнологій автоматизації і роботизації при зованому режимі, то для адресації вантажів, в відносній простоті конструкції і експлуатації з проскомп'ютерну систему закладена програма роботи тим і ефективним розвантажувальним пристроєм. 9 37597 10 11 37597 12 13 Комп’ютерна в ерстка Г. Паяльніков 37597 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюOperating unit of radio-controlled electric truck of transport system
Автори англійськоюLavriv Vitalii Pavlovych, Kravtsiv Roman Yosypovych, Oschypok Ihor Mykolaiovych, Lavriv Pavlo Yurkovych
Назва патенту російськоюРабочий орган радиоуправляемой электротележки транспортной системы
Автори російськоюЛаврив Виталий Павлович, Кравцив Роман Иосифович, Ощипок Игорь Николаевич, Лаврив Павел Юркович
МПК / Мітки
МПК: B60W 10/00
Мітки: робочий, системі, електровізка, радіокерованого, орган, транспортної
Код посилання
<a href="https://ua.patents.su/7-37597-robochijj-organ-radiokerovanogo-elektrovizka-transportno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Робочий орган радіокерованого електровізка транспортної системи</a>
Робочий орган транспортної системи
Номер патенту: 43010
Опубліковано: 15.11.2001
Автори: Занічковська Любов Володимирівна, Ощипок Ігор Миколайович
МПК: B60P 3/00
Мітки: транспортної, системі, робочий, орган
Формула / Реферат:
1. Робочий орган транспортної системи, що складається з двигуна, силової передачі, ходової частими і кузова, який відрізняється тим, що рама, до якої закріплено кузов, укомплектована механізмом фіксації, який містить хрестовинні затискачі, пружини стискування, які встановлено з можливістю фіксування в гнізді квадратного перерізу пальця, прикріпленого до кузова.2. Робочий орган транспортної системи по п. 1, який відрізняється тим, що...
Робочий орган землерийно-транспортної машини активної дії
Номер патенту: 53190
Опубліковано: 15.01.2003
Автори: Смірнов Вячеслав Миколайович, Рашківський Володимир Павлович, Баладінський Вадим Леонідович, Солонько Руслан Миколайович, Пелевін Леонід Євгенович
Мітки: активної, землерійно-транспортної, дії, машини, орган, робочий
Формула / Реферат:
Робочий орган землерийно-транспортної машини активної дії, що містить задню стінку і лобовий лист, рухому різальну кромку, який відрізняється тим, що різальна кромка відвалу виконана у вигляді рухомого ножа з можливістю поперечного руху, в нижній частині відвалу виконано робочу камеру, причому в робочу камеру встановлено гідроциліндр, в поршні якого виконана виточка, який з'єднаний з рухомим ножем, а робоча камера з'єднана з золотником, в...
Робочий орган гідроустановки
Номер патенту: 73103
Опубліковано: 15.06.2005
Автор: Філіпчук Степан Павлович
МПК: F03B 13/00, F03B 1/00
Мітки: орган, гідроустановки, робочий
Формула / Реферат:
1. Робочий орган гідроустановки, що містить обертальний елемент, змонтований на валу, пустотілі лопаті, поворотно прикріплені до обертального елемента, який відрізняється тим, що обертальний елемент виконаний у вигляді барабана, на поверхні якого містяться ніші, у яких розташовані пустотілі поворотні лопаті.2. Робочий орган за п. 1, який відрізняється тим, що лопаті легші за воду.3. Робочий орган за п. 1, який відрізняється тим,...
Робочий орган культиватора
Номер патенту: 29371
Опубліковано: 10.01.2008
Автори: Тищенко Сергій Сергійович, Пугач Андрій Миколайович, Матюха Володимир Леонідович, Волик Борис Анатолійович, Матюха Леонід Панасович, Кобець Анатолій Степанович
МПК: A01B 35/26
Мітки: орган, культиватора, робочий
Формула / Реферат:
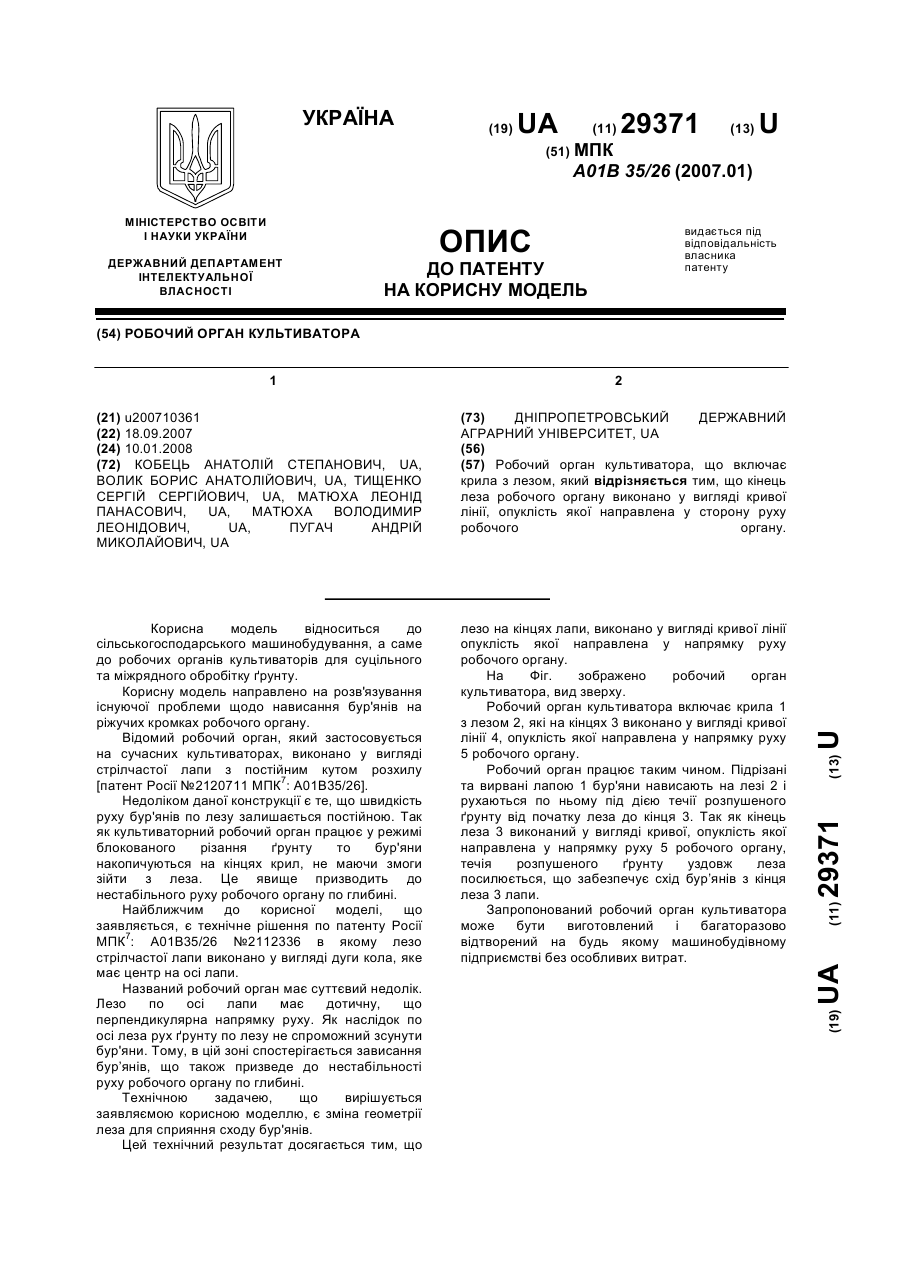
Робочий орган культиватора, що включає крила з лезом, який відрізняється тим, що кінець леза робочого органу виконано у вигляді кривої лінії, опуклість якої направлена у сторону руху робочого органу.
Дисковий робочий орган грунтообробної машини
Номер патенту: 28158
Опубліковано: 26.11.2007
Автори: Гуков Яків Серафимович, Вольський Володимир Анатолійович, Дудак Сергій Миколайович
МПК: A01B 7/00
Мітки: дисковий, орган, робочий, грунтообробної, машини
Формула / Реферат:
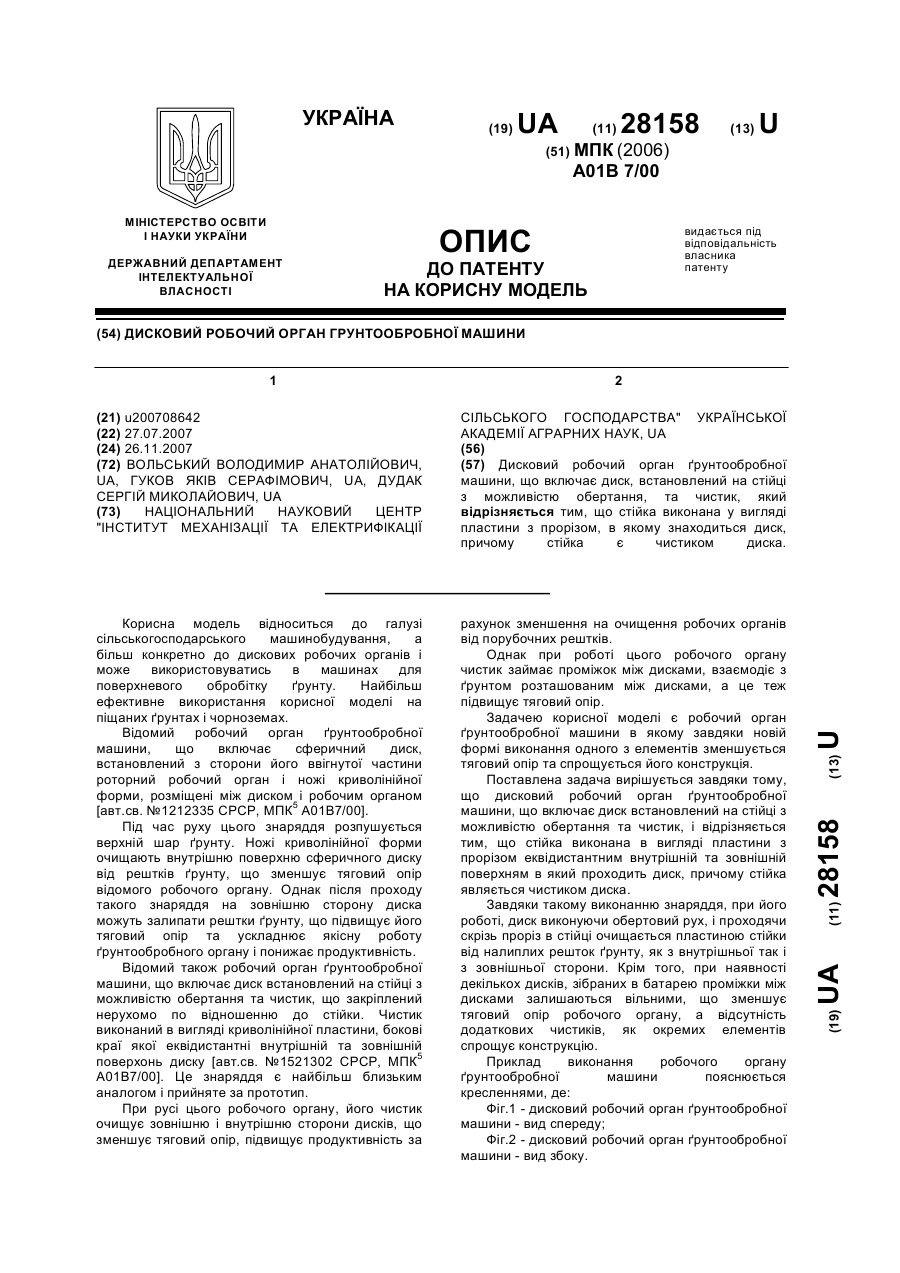
Дисковий робочий орган ґрунтообробної машини, що включає диск, встановлений на стійці з можливістю обертання, та чистик, який відрізняється тим, що стійка виконана у вигляді пластини з прорізом, в якому знаходиться диск, причому стійка є чистиком диска.
Попередній патент: Спосіб визначення приросту фітомаси деревостанів
Наступний патент: Прилад аморфізації металів о.кугушова
Випадковий патент: Пояс медичний