Детектор та спосіб детектування пакетного імпульсу

Формула / Реферат
1. Детектор для детектирования пакетного импульса, отличающийся тем, что он содержит фильтр (220, 320), фильтрующий принимаемый сигнал и имеющий импульсную характеристику ожидаемого пакетного импульса, схему вычитания (230, 330), функционально связанную с указанным фильтром и имеющую выход, формирующий сигнал детектирования, равный задержанной и отфильтрованной версии принятого сигнала за вычетом отфильтрованной версии принятого сигнала, и детектор фронта импульса (250, 350), функционально связанный с сигналом детектирования указанной схемы вычитания (230) для детектирования переднего фронта импульса.
2. Детектор по пункту 1, отличающийся тем, что указанный фильтр (220) представляет собой фильтр скользящего среднего, который формирует усредненный сигнал, базирующийся на принимаемом сигнале, включает в себя ступень задержки (240), функционально связанную с указанной схемой вычитания (230) и указанным фильтром скользящего среднего (220), и имеет выход, формирующий задержанный усредненный сигнал, а указанная схема вычитания (230) формирует сигнал детектирования, равный указанному усредненному сигналу за вычетом задержанного усредненного сигнала.
3. Детектор по пункту 2, отличающийся тем, что указанная ступень задержки (240) имеет величину задержки, соответствующую длительности ожидаемого пакетного импульса.
4. Детектор по пункту 1, отличающийся тем, что он содержит ступень задержки (340), подсоединенную к указанной схеме вычитания (330) и к принимаемому сигналу и имеющую выход, который формирует задержанный принятый сигнал, при этом указанный фильтр (220, 320) включает в себя фильтр скользящего среднего (320), который формирует усредненный сигнал, базирующийся на принятом сигнале, и второй фильтр скользящего среднего (360), функционально связанный с указанной ступенью задержки (340) и имеющий выход, который формирует задержанный усредненный сигнал, причем указанная схема вычитания (330) формирует сигнал детектирования, равный усредненному сигналу за вычетом задержанного усредненного сигнала.
5. Детектор по пункту 1, отличающийся тем, что указанный детектор фронта импульса (250, 350) представляет собой селектор максимума/минимума (250), функционально связанный с указанной схемой вычитания (230, 330) для селектирования максимума/минимума сигнала детектирования.
6. Детектор по пункту 1, отличающийся тем, что указанный детектор фронта импульса (250, 350) представляет собой схему сравнения с заданной моделью (350), функционально связанную с указанной схемой вычитания (230, 330) для сравнения по модели формы сигнала детектирования с ожидаемой формой сигнала.
7. Детектор по пункту 1, отличающийся тем, что указанный фильтр (220, 320) представляет собой цифровой фильтр, имеющий импульсную характеристику, соответствующую длительности ожидаемого пакетного импульса.
8. Способ детектирования пакетного импульса, отличающийся тем, что он содержит операции вычитания отфильтрованной версии принятого сигнала из задержанной и отфильтрованной версии принятого сигнала, при этом принимаемый сигнал фильтруется фильтром, имеющим импульсную характеристику ожидаемого пакетного импульса, и детектирование переднего фронта импульса в результате указанной операции вычитания.
9. Способ по пункту 8, отличающийся тем, что указанная операция вычитания содержит подоперации фильтрации через фильтр скользящего среднего для формирования усредненного сигнала, базирующегося на принятом сигнале, задержки усредненного сигнала от указанной операции фильтрации для формирования задержанного усредненного сигнала, и вычитания задержанного усредненного сигнала от указанной операции задержки из усредненного сигнала от указанной операции фильтрации.
10. Способ по пункту 8, отличающийся тем, что указанная операция вычитания содержит подоперации задержки принимаемого сигнала для формирования задержанного принятого сигнала, фильтрации фильтром скользящего среднего принятого сигнала для формирования усредненного сигнала, фильтрации фильтром скользящего среднего задержанного принятого сигнала для формирования задержанного усредненного сигнала, базирующегося на задержанном принятом сигнале, и вычитания задержанного усредненного сигнала из усредненного сигнала.
Текст
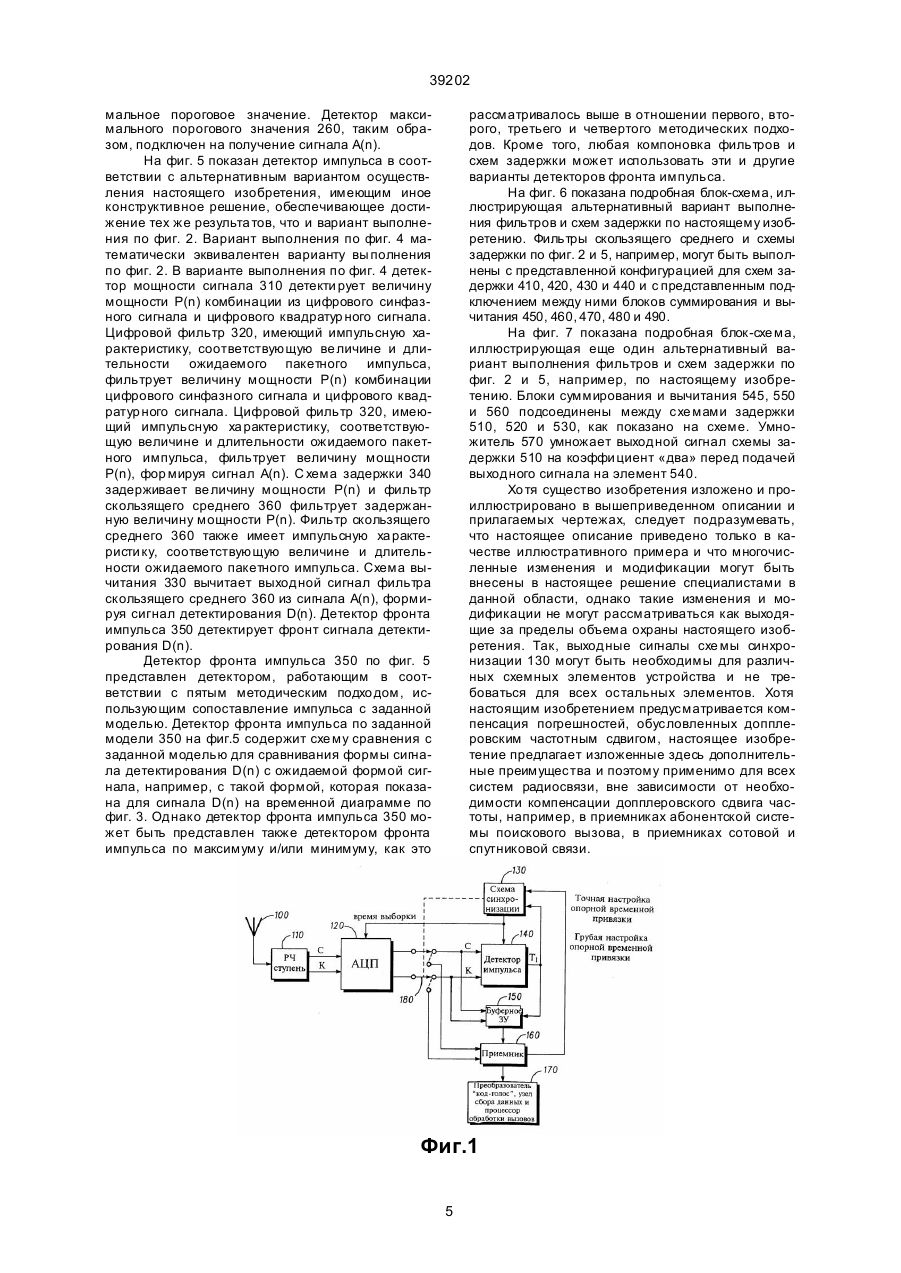
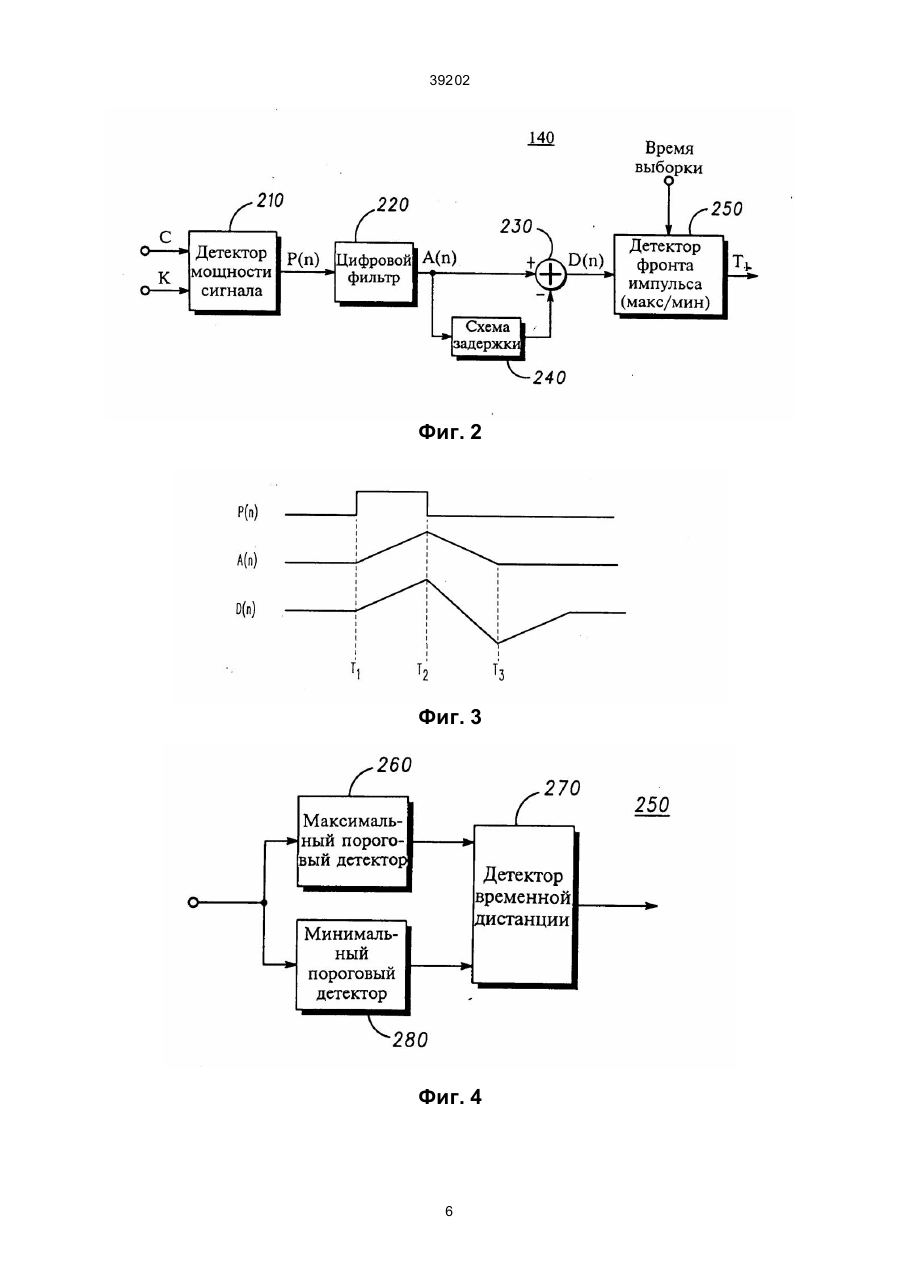
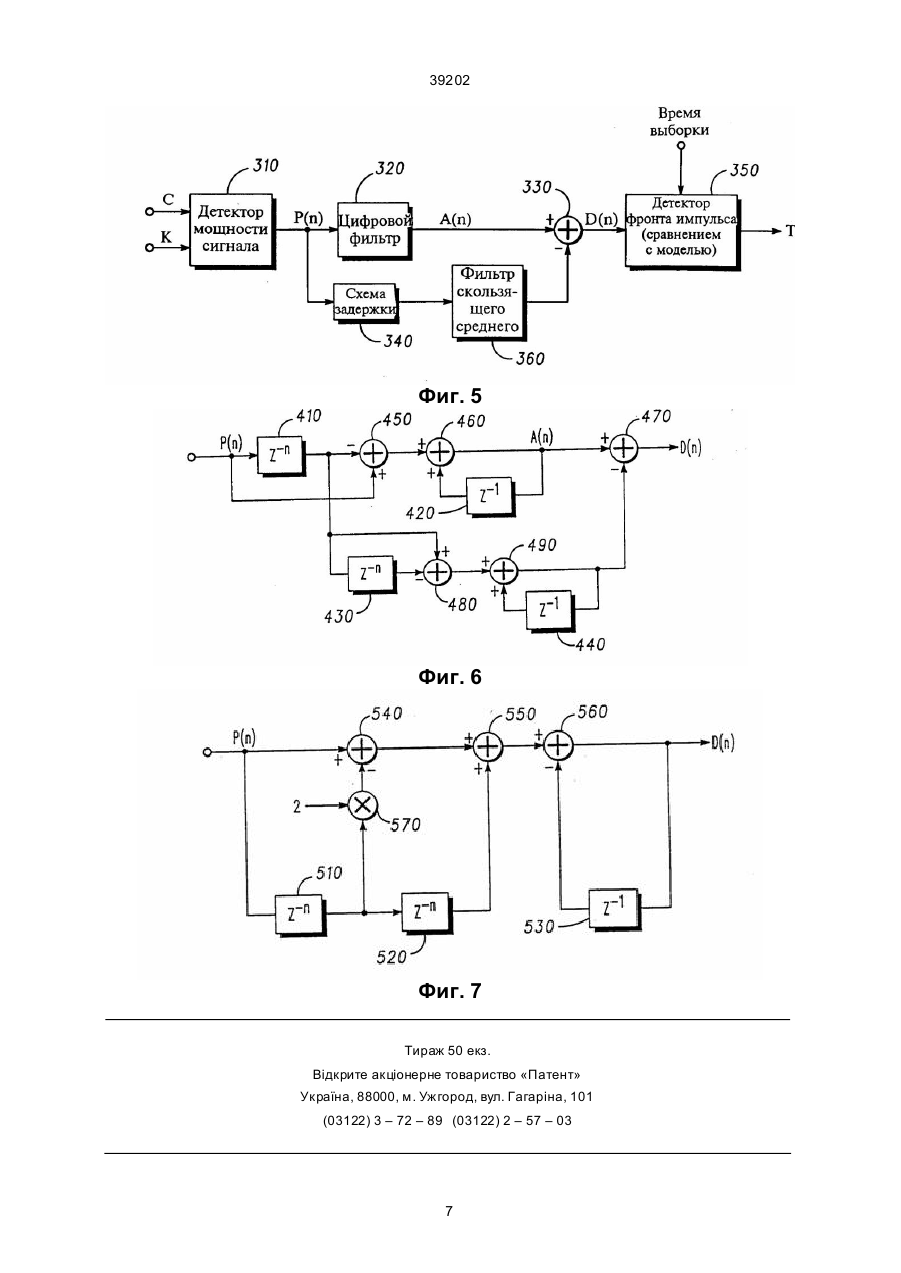
1. Детектор для детектирования пакетного импульса, отличающийся тем, что он содержит фильтр (220, 320), фильтрующий принимаемый сигнал и имеющий импульсную характеристику ожидаемого пакетного импульса, схему вычитания (230, 330), функционально связанную с указанным фильтром и имеющую вы ход, формирующий сигнал детектирования, равный задержанной и отфильтрованной версии принятого сигнала за вычетом отфильтрованной версии принятого сигнала, и детектор фронта импульса (250, 350), функционально связанный с сигналом детектирования указанной схемы вычитания (230) для детектирования переднего фронта импульса. 2. Детектор по пункту 1, отличающийся тем, что указанный фильтр (220) представляет собой фильтр скользящего среднего, который формирует усредненный сигнал, базирующийся на принимаемом сигнале, включает в себя ступень задержки (240), функционально связанную с указанной схемой вычитания (230) и указанным фильтром скользящего среднего (220), и имеет выход, формирующий задержанный усредненный сигнал, а указанная схема вычитания (230) формирует сигнал детектирования, равный указанному усредненному сигналу за вычетом задержанного усредненного сигнала. 3. Детектор по пункту 2, отличающийся тем, что указанная ступень задержки (240) имеет величину задержки, соответствующую длительности ожидаемого пакетного импульса. 4. Детектор по пункту 1, отличающийся тем, что он содержит ступень задержки (340), подсоединенную к указанной схеме вычитания (330) и к принимаемому сигналу и имеющую вы ход, который формирует задержанный принятый сигнал, при этом указанный фильтр (220, 320) включает в себя фильтр скользящего среднего (320), который C2 (54) ДЕТЕКТОР ТА СПОСІБ ДЕТЕКТУВАННЯ ПАКЕТНОГО ІМПУЛЬСУ 39202 10. Способ по пункту 8, отличающийся тем, что указанная операция вычитания содержит подоперации задержки принимаемого сигнала для формирования задержанного принятого сигнала, фильтрации фильтром скользящего среднего принятого сигнала для формирования усредненного сигнала, фильтрации фильтром скользящего среднего задержанного принятого сигнала для формирования задержанного усредненного сигнала, базирующегося на задержанном принятом сигнале, и вычитания задержанного усредненного сигнала из усредненного сигнала. _______________________ Настоящее изобретение относится к приемнику сигнала связи и, более конкретно, относится к приемнику сигнала связи, использующему детектор импульса для детектирования пакетного импульса. Приемник системы импульсной связи, такой, например, как цифровой приемник или приемник РЛС, должен получать опорный сигнал временной привязки для декодирования принимаемого сигнала связи. В системе цифровой связи, например, в системе TDMA (множественный доступ с временным разделением каналов), осуществляется периодический прием фреймов (блоков) информации. Опорный сигнал временной привязки для принимаемого фрейма может быть получен детектированием любого ожидаемого пакетного импульса в определяющей позиции в пределах этого фрейма. Например, появляющийся в начале или в ином месте фрейма пакетный импульс может детекти роваться для получения опорного сигнала временной привязки с целью декодирования принимаемого сигнала связи. По обнаружении импульса может осуществляться вычленение информации из фрейма или других частей принимаемого сигнала связи. Эта информация может также использоваться с целью получе ния синхронизации для последующих фреймов. Такая фрейм-синхронизация требуется перед детектированием информации с целью формирования выходного сигнала для пользователя приемника. В известных в практике конструкциях приемников принимаемый сигнал с целью установления опорной временной привязки соотносится с заранее ожидаемой моделью сигнала. Более конкретно, за сопоставлением принимаемого сигнала с ожидаемым сигналом следует выявление пика корреляции с целью установления опорной временной привязки. Такая систе ма требует передачи от передатчика к приемнику заранее заданных моделей сигнала, что ве дет к непроизводительному заниманию отведенной полосы частот и к ограничению возможностей систе мы. При условии создания системы, не использующей заранее задаваемые модели сигнала для установления опорной временной привязки, рабочие возможности систе мы возрастают при сбережении объема полосы частот. Когда разность частот в приемнике и передатчике дости гает значительной величины, указанная выше методика сопоставления становится ненадежной. Такие значительные величины разности частот могут быть вызваны различиями в опорных частотах передатчика и приемника, обусловленными, например, погрешностями кристалла. Кроме того, такая значительная разность час тот может быть вызвана при перемещении приемника относительно передатчика с большой скоростью. Например, при перемещении самолета или спутника с высокой скоростью обычно возникают вызванные допплеровским смещением частотные ошибки при осуществлении связи с наземной станцией или с другим самолетом или спутником. При достижении разностью частот между передатчиком и приемником значительной величины принимаемый сигнал смещается за пределы диапазона корреляции его с моделью ожидаемого сигнала. Таким образом, при возраста нии разности частот принимаемый сигнал и модель ожидаемого сигнала все более дискоррелируют друг с другом, и поэтому установка опорной временной привязки становится все более затрудненной. Еще в одном типе известных в практике приемников, та ких как приемник Рейка (Rake), множественные приемные тракты, каждый из которых имеет отличный от других трактов сдвиг частоты, осуществляют одновременное сопоставление принимаемого сигнала с заранее заданной моделью для установления опорной временной привязки. В результате задействования множественных трактов приема разность частот, восп ринимаемая на одном из таких приемных каналов, может быть достаточно малой, что бы обеспечивать адекватное детектирование пика корреляции. Однако такой технологический подход требует использования множественных трактов приема, что удорожает и усложняет конструкцию приемника. Кроме того, множественные тракты приема требуют дополнительного времени на обработку и могут приводить к задержкам во времени в ходе осуществления выбора среди множества трактов. Качественные показатели любой из вышеприведенных те хнологий снижаются также и при уменьшении отношения сигнал-шум. Та кая деградация функциональных показателей обусловлена ошибочным детектированием пика корреляции. По мере уменьшения отношения сигнал-шум становится труднее отличать пики корреляции, вызванные шумом, от пиков корреляции с ожидаемой моделью сигнала. На фиг. 1 представлена блок-схема приемника с детекти рованием импульса по настоящему изобретению. На фиг. 2 представлена блок-схема варианта вы полнения детектора импульса по настоящему изобретению. На фиг. 3 представлена временная диаграмма, иллюстрирующая сигналы Р(n), А(n) и D(n) в соответствии с настоящим изобретением. 2 39202 На фиг. 4 представлена блок-схе ма выполнения детектора края (фронта) импульса. На фиг. 5 представлена блок-схема альтернативного варианта выполнения детектора импульса по настоящему изобретению. На фиг. 6 и 7 представлены подробные блок-схемы, иллюстрирующие альтернативные варианты выполнения фильтров и схем задержки по настоящему изобретению. Подробное описание предпочтительных вариантов осуществления На фиг. 1 показана блок-схе ма радиоприемника с детекти рованием импульса по настоящему изобретению. Антенна 100 принимает радиочастотный сигнал, и радиочастотная (РЧ) ступень 110 преобразует радиочастотный сигнал в синфазный сигнал (С) и квадратур ный сигнал (К). Аналогоцифровой преобразователь 120 осуществляет обработку синфазного сигнала и квадратур ного сигнала, фор мируя цифровой синфазный сигнал и цифровой квадратур ный сигнал в соответствии со временем выборки, задаваемым схемой синхронизации 130. Детектор импульса 140 устанавливает грубую настройку опорной привязки по времени Т1 в соответствии с цифровым синфазным сигналом и цифровым квадратур ным сигналом от аналого-цифрового преобразователя 120 и в соответствии со временем выборки, задаваемым схемой синхронизации 130. Цифровой синфазный сигнал и цифровой квадратур ный сигнал, поступающие от аналого-цифрового преобразователя 120, вносятся в буферное ЗУ 150. После детектирования пакетного импульса, что определяется выдачей детекто ром импульса 140 грубой настройкой опорной временной привязки Т1, сигналы, хранящиеся в буферном ЗУ 150, передаются на приемник 160. После этого приемник выдает на схе му синхронизации 130 точную настройку опорной временной привязки и может подавать принимаемые данные на преобразователь код-голос, устройство сбора данных и процессор обработки вызовов 170, например, радиоприемника. Настоящее изобретение расши ряет функциональные возможности систе мы связи и обеспечивает опти мизацию использования объема выделенной полосы частот бла годаря отсутствию необхо димости использования заранее задаваемых моделей сигнала для установления опорной временной привязки. Надежное детектирование импульса при использовании настоящего изобретения возможно даже тогда, когда разность частот передатчика и приемника дости гает значительных величин из-за допплеровского смещения или погрешности кристалла. Та кой эффект дости гается благодаря тому, что фильтр по настоящему изобретению надежно детектирует импульсы без использования заранее заданных моделей сигналов или запрограммированной корреляции последовательности. Настоящее изобретение не приводит к деградации отношения сигнал-шум из-за ошибочного детектирования пиков корреляции. В настоящем изобретении осуществляется распознавание ха рактеристик самого сигнала. Например, когда в сигнале возникает пакетный импульс, может детекти роваться характеристика постоянного перехода мощности. Настоящее изобретение также позволяет обойтись без использования множест венных трактов приема для установки опорной временной привязки, как это делается в приемнике Рейка, что сокращает время обработки. Когда детектор импульса 140 детекти рует пакетный импульс, что определяется формированием сигнала грубой настройки опорной временной привязки Т1, схема синхронизации 130 инициирует изменение режима детекти рования импульса к режиму уп равляемого приема. Пока аппарат находится в ре жиме детектирования импульса, опорная временная привязка еще не получе на детектором импульса 140 и информация еще не может быть вычленена из поступающего сигнала для формирования выходного сигнала для пользователя приемника. После получе ния детектором импульса 140 опорной временной привязки информация может последовательно вычленяться из принимаемого сигнала приемником 160, исхо дя из предположения, что синхронизация будет изменяться в медленном режиме. Переключатель режима 180 осуществляет переключение между режимом детекти рования импульса и режимом управляемого приема в ответ на сигнал от схе мы синхронизации 130. В хо де работы в ре жиме управляемого приема медленные изменения в режиме синхронизации корректируются приемником 160 через линию точной настройки опорной временной привязки. Приемник 160 формирует сигнал точной настройки опорной временной привязки, исхо дя из собственной синхронизации, базирующейся на вычленяемой из принимаемого сигнала информации, чтобы обеспечивать компенсацию медленных изменений синхронизации. Схема синхронизации 130 задает время выборки для синхронизирования процесса выборки, осуществляемого аналого-цифровым преобразователем 120, а также задает время выборки цифровым цепям детектора импульса 140. Схема синхронизации 130 может содержать, например, триггерную схему и счетчик. После детектирования пакетного импульса, что определяется выдачей сигнала грубой настройки временной привязки Т1, триггерная схема запускается, инициируя изменение режима посредством переключателя 180. Счетчик переустанавливается (сбрасывается) и начинает отсчет в соответствии с сигналом грубой настройки опорной временной привязки Т1 с целью формирования сигнала времени выборки для синхронизации аналого-цифрового преобразователя 120 и детектора импульса 140. На фиг. 2 показана блок-схе ма варианта выполнения детектора импульса по настоящему изобретению. Детектор мощности сигнала 210 выявляет величину мощности Р(n) комбинации из цифрового синфазного сигнала и цифрового квадратур ного сигнала. Цифровой фильтр 220, имеющий импульсную ха рактеристику, соответствующую величине и длительности ожидаемого пакетного импульса, фильтрует величину мощности Р(n), формируя сигнал А(n). Cxема вычитания 230 вычитает задержанную версию сигнала А(n), выдаваемого схе мой задержки 240, от самого сигнала А(n), фор мируя сигнал детектирования D(n). Детектор края (фронта) сигнала 250 выявляет край (фронт) сигнала детектирования D(n). Цифровой фильтр 220 фильтрует ве личину мощности Р(n) с целью снижения мощности шума. 3 39202 В результате этой фильтрации увеличивается отношение сигнал-шум, чем улучшается качество работы детектора. Цифровой фильтр 220 может представлять собой фильтр конечного импульсного отклика с характеристиками близкими или приближающимися к характеристикам ожидаемого пакетного импульса. Цифровой фильтр 220, согласованный с ожидаемым импульсом, дает максимальное значение отношения сигнал-шум. Однако в качестве цифрового фильтра 220 может использоваться любой фильтр, увели чивающий отношение сигнал-шум. Детектор края (фронта) импульса 250 детектирует фронт сигнала детектирования D(n) и синхронизируется по временивыборки, задаваемому схе мой синхронизации 130. Детектор фронта импульса 250 может использовать пороговые значения для детектирования фронта сигнала детектирования D(n). В качестве альтернативного варианта, приводимого как пример выполнения настоящего изобретения, детектор фронта импульса 250 использует максимумы или минимумы значений в первом, втором, третьем и четвертом методическом подхо де к определению переднего фронта импульса, как это будет изложено ниже при рассмотрении фиг. 4. Детектор фронта импульса 250 может также использовать пятый методический подход, например, методику сопоставления моделей импульсов. На фиг. 3 показана временная диаграмма для детектора импульса, иллюстрирующая сигналы А(n) и D(n), формируемые в ответ на волну, имеющую вид идеального меандра Р(n). Максимум и/или минимум сигнала детектирования D(n) no фиг. 3 может детектироваться детектором фронта импульса 250 в ниже рассматриваемых первом, втором и третьем методических подхо дах для определения переднего фронта импульса. В четвертом методическом подхо де вместо этого может использоваться время сигнала А(n) для определения переднего фронта импульса, как это будет изложено ниже при рассмотрении фиг. 4. В дополнение, на фиг. 3 показано сопоставление по модели формы сигнала детектирования D(n) с ожидаемой формой волны, например, с моделью профиля для сигнала D(n). На фиг. 4 показан вариант выполнения детекто ра фронта импульса, использующего детекторы максимального и/или минимального пороговых значений 260, 280 и детектор временной дистанции 270. Детектор фронта импульса 250 детектирует одно из значений либо и максимальное, и минимальное значение сигнала детектирования D(n) при использовании излагаемых ниже первого, вто рого и третьего методических подхо дов. Хотя детектор максимального порогового значения 260 и детектор минимального порогового значения 280 предпочти тельно представляют собой пороговые детекторы, приемлемым является любой селектор, способный идентифицировать максимум и минимум. В первом, вто ром и третьем методических подхо дах время максимума и/или время минимума может быть определено установкой порогового значения. Детектор максимального порогового значения 260 сравнивает сигнал детектирования D(n) с установленным порогом, чтобы определить, не превышает ли максимум сигнала де текти рования D(n) с установленным порогом, чтобы определить, не превышает ли максимум сигнала детекти рования D(n) максимальное пороговое значение. Детектор минимального порогового значения 280 сравнивает сигнал D(n) с установленным порогом, чтобы определить, не лежит ли сигнал детектирования D(n) ниже минимального порогового значения. Первый методический подход к определению переднего фронта импульса заключается в определении времени максимума и времени минимума сигнала детектирования D(n). Если разница во времени максимума и времени минимума приближенно равна длительности ожидаемых пакетных импульсов, передний фронт импульса может быть определен по времени максимума, времени минимума и длительности ожидаемых импульсов. Максимум определяется детектором максимального порогового значения 260, и время минимума определяется детектором минимального порогового значения 280. Дистанция между временем максимума и временем минимума определяется детектором временной дистанции 270. Детектор временной дистанции 270 образуется определяющей схе мой, подсоединенной к детектору максимального порогового значения 260 и к детектору минимального порогового значения 280 для определения переднего фронта импульса, исхо дя из среднего значения от времени максимума и времени минимума. Среднее значение от времени максимума и времени минимума предпочтительно сравниваются с 1S ожидаемой длительности импульсов. Поэтому передний фронт импульсов основывается на среднем значении от времени максимума и времени минимума минус 1S ожидаемой длительности импульсов. Второй методический подход заключается в определении времени максимума сигнала детектирования D(n). По времени максимума, определяемому детектором максимального порогового значения 260, и по длительности ожидаемого пакетного импульса может быть определен передний фронт импульса. Представленные на фигуре детектор минимального порогового значения 280 и детектор временной дистанции 270 в этом втором методическом подхо де не нужны. Третий методический подход заключается в определении времени минимума сигнала детектирования D(n). По времени минимума, определяемому детектором минимального порогового значения 280, и по длительности ожидаемого пакетного импульса может быть определен передний фронт импульса. Показанные на фигуре детектор максимального порогового значения 260 и детектор временной дистанции 270 в этом третьем методическом подходе не нужны. В качестве альтернативы, в четвертом методическом подходе передний фронт импульса может быть определен по детектированию времени максимума сигнала А(n). По вре мени максимума и по длительности импульса может быть определен передний фронт импульса. В этом четвертом методическом подхо де время максимума может быть определено сравниванием с пороговым значением, чтобы определить, не превышает ли максимум сигнала детектирования D(n) макси 4 39202 мальное пороговое значение. Детектор максимального порогового значения 260, таким образом, подключен на получение сигнала А(n). На фиг. 5 показан детектор импульса в соответствии с альтернативным вариантом осуществления настоящего изобретения, имеющим иное конструктивное решение, обеспечивающее достижение тех же результа тов, что и вариант выполнения по фиг. 2. Вариант выполнения по фиг. 4 математически эквивалентен варианту вы полнения по фиг. 2. В варианте выполнения по фиг. 4 детектор мощности сигнала 310 детекти рует величину мощности Р(n) комбинации из цифрового синфазного сигнала и цифрового квадратур ного сигнала. Цифровой фильтр 320, имеющий импульсную характеристику, соответствующую ве личине и длительности ожидаемого пакетного импульса, фильтрует величину мощности Р(n) комбинации цифрового синфазного сигнала и цифрового квадратур ного сигнала. Цифровой фильтр 320, имеющий импульсную ха рактеристику, соответствующую величине и длительности ожидаемого пакетного импульса, фильтрует величину мощности Р(n), фор мируя сигнал А(n). С хема задержки 340 задерживает ве личину мощности Р(n) и фильтр скользящего среднего 360 фильтрует задержанную величину мощности Р(n). Фильтр скользящего среднего 360 также имеет импульсную ха рактеристи ку, соответствующую величине и длительности ожидаемого пакетного импульса. Схема вычитания 330 вычитает выходной сигнал фильтра скользящего среднего 360 из сигнала А(n), формируя сигнал детектирования D(n). Детектор фронта импульса 350 детектирует фронт сигнала детектирования D(n). Детектор фронта импульса 350 по фиг. 5 представлен детектором, работающим в соответствии с пятым методическим подхо дом, использующим сопоставление импульса с заданной моделью. Детектор фронта импульса по заданной модели 350 на фиг.5 содержит схе му сравнения с заданной моделью для сравнивания формы сигнала детектирования D(n) с ожидаемой формой сигнала, например, с такой формой, которая показана для сигнала D(n) на временной диаграмме по фиг. 3. Однако детектор фронта импульса 350 может быть представлен также детектором фронта импульса по максимуму и/или минимуму, как это рассматривалось выше в отношении первого, второго, третьего и четвертого методических подходов. Кроме того, любая компоновка фильтров и схем задержки может использовать эти и другие варианты детекторов фронта импульса. На фиг. 6 показана подробная блок-схема, иллюстрирующая альтернативный вариант выполнения фильтров и схем задержки по настоящему изобретению. Фильтры скользящего среднего и схемы задержки по фиг. 2 и 5, например, могут быть выполнены с представленной конфигурацией для схем задержки 410, 420, 430 и 440 и с представленным подключением между ними блоков суммирования и вычитания 450, 460, 470, 480 и 490. На фиг. 7 показана подробная блок-схе ма, иллюстрирующая еще один альтернативный вариант выполнения фильтров и схем задержки по фиг. 2 и 5, например, по настоящему изобретению. Блоки суммирования и вычитания 545, 550 и 560 подсоединены между схе мами задержки 510, 520 и 530, как показано на схеме. Умножитель 570 умножает выходной сигнал схемы задержки 510 на коэффи циент «два» перед подачей выходного сигнала на элемент 540. Хо тя существо изобретения изложено и проиллюстрировано в вышеприведенном описании и прилагаемых чертежах, следует подразумевать, что настоящее описание приведено только в качестве иллюстративного примера и что многочисленные изменения и модификации могут быть внесены в настоящее решение специалистами в данной области, однако такие изменения и модификации не могут рассматриваться как выходящие за пределы объема охраны настоящего изобретения. Так, выходные сигналы схе мы синхронизации 130 могут быть необходимы для различных схемных элементов устройства и не требоваться для всех остальных элементов. Хотя настоящим изобретением предусматривается компенсация погрешностей, обусловленных допплеровским частотным сдвигом, настоящее изобретение предлагает изложенные здесь дополнительные преимущества и поэтому применимо для всех систем радиосвязи, вне зависимости от необходимости компенсации допплеровского сдвига частоты, например, в приемниках абонентской системы поискового вызова, в приемниках сотовой и спутниковой связи. Фиг.1 5 39202 Фиг. 2 Фиг. 3 Фиг. 4 6 39202 Фиг. 5 Фиг. 6 Фиг. 7 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 7
ДивитисяДодаткова інформація
Назва патенту англійськоюDetector and method of burst impulse detecting
Автори англійськоюBack Breadly B., Arenz John W.
Назва патенту російськоюДетектор и способ детектирования пакетного импульса
Автори російськоюБакк Бредли Б., Аренз Джон У.
МПК / Мітки
МПК: H03D 3/00, H04L 27/22
Мітки: спосіб, детектор, детектування, пакетного, імпульсу
Код посилання
<a href="https://ua.patents.su/7-39202-detektor-ta-sposib-detektuvannya-paketnogo-impulsu.html" target="_blank" rel="follow" title="База патентів України">Детектор та спосіб детектування пакетного імпульсу</a>
Формувач одиночного імпульсу
Номер патенту: 2720
Опубліковано: 26.12.1994
Автори: Войциховський Григорій Іванович, Тригуб Степан Петрович, Камуля Михайло Петрович, Рафалюк Олександр Олексійович
МПК: H03K 5/01
Мітки: формувач, імпульсу, одиночного
Формула / Реферат:
Формирователь одиночного импульса, содержащий элемент И-ИЛИ, счетчик-дешифратор, 1,2,3,4,..N-й выходы счетчика-дешифратора соединены с первыми входами групп И элементов И-ИЛИ, вторые входы групп И которого соединены с шинами кода, управляющую шину, тактовую шину, выходную шину, отличающийся тем, что, с целью повышения надежности, в формирователь введен элемент ИЛИ-НЕ, первый вход которого соединен с входом установки нуля...
Спосіб вимірювання армуючого напруження пакетного п’єзокерамічного перетворювача
Номер патенту: 26958
Опубліковано: 29.12.1999
Автори: Хаустов Володимир Кирилович, Писаренко Георгій Георгійович
Мітки: п'єзокерамічного, спосіб, армуючого, вимірювання, пакетного, напруження, перетворювача
Текст:
...4 управления и измерения с выхода генератора 3 на 15 первую клемму преобразователя I подают минимальное электрическое гармоническое напряжение с резонансной частотой преобразователя, которое создает в преобразователе 1 механическое напряжение CTq , соответствую- 20 щее условиям сжатия о При этом с помощью блоков 2 и 4 измеряют рассея- ние энергии UW при существующем в преобразователе 1 циклическом напряжении СГд * Затем с блока 4 управ- 25...
Синхронний детектор в.п.аркушина

Номер патенту: 18761
Опубліковано: 25.12.1997
Автор: Аркушин Василь Прокопович
МПК: H03D 3/00
Мітки: детектор, синхронний, в.п.аркушина
Формула / Реферат:
Синхронный детектор, содержащий первый и второй интеграторы со входами установки в нуль, входы которых соединены и являются входом синхронного детектора, а выходы соединены с прямым и инверсным входами вычитающего сумматора, выход которого является выходом синхронного детектора, блок управления установкой интеграторов в нуль, выходы которого соединены с входами установки в нуль соответствующих интеграторов, отличающийся тем, что введены...
Спосіб формування короткого оптичного імпульсу заданої тривалості
Номер патенту: 24554
Опубліковано: 04.08.1998
Автори: Ватова Лариса Борисівна, Балабан Василь Михайлович, Рубінштейн Борис Ізраілевич, Тимофєєв Євген Петрович
МПК: G01J 11/00
Мітки: короткого, імпульсу, формування, оптичного, спосіб, тривалості, заданої
Формула / Реферат:
Способ формирования короткого оптического импульса заданной длительности t, при котором формируют исходный оптический импульс, длительность которого tu может отличаться от t, преобразуют его в два оптических импульса такой же длительности и измеряют длительность одного из них, устанавливая, что ее значение находится в интервале tmin £ tu £ tmax, отличающийся тем, что второй импульс преобразуют в N импульсов такой же длительности и...
Сцинтиляційний детектор

Номер патенту: 25308
Опубліковано: 30.10.1998
Автори: Рижиков Володимир Діомидович, Свищ Володимир Митрофанович
Мітки: детектор, сцинтиляційний
Формула / Реферат:
Сцинтилляционный детектор, содержащий кристаллический сцинтиллятор со световодом, оптически связанным с регистратором излучения, отличающийся тем, что в него введены (n - 1) световодов, расположенных в сцинтилляторе на расстоянии друг от друга, равном длине свободного пробега фотонов, выходами оптически связанных с регистратором излучения.
Попередній патент: Кантувач листів
Наступний патент: Спосіб переробки пластмасової утильсировини або пластмасових відходів
Випадковий патент: Спосіб оцінки функціонального стану хворих на хронічну серцеву недостатність