Телескопічний підйомник
Номер патенту: 4065
Опубліковано: 27.12.1994
Автори: Коняхін Георгій Петрович, Тюшка Михайло Михайлович, Заславський Марк Симонович, Ситник Микола Петрович, Вакуленко Борис Іванович, Підгородецький Валентин Петрович, Іванов Іван Васильович

Формула / Реферат
1. Телескопический подъемник, содержащий установленную на опорной платформе телескопическую башню с неподвижной внешней и подвижной внутренней секцией, закрепленный на последней оголовок с подвесками, выполненными с возможностью взаимодействия с установленной на неподвижной секции с возможностью перемещения вдоль нее грузовой площадкой с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упорами, размещенными равномерно вдоль неподвижной секции, и силовой механизм, отличающийся тем, что он снабжен установленным на неподвижной секции башни с возможностью перемещения вдоль нее кольцом с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упомянутыми упорами неподвижной секции башни, упорами, равномерно размещенными на подвижной секции башни с шагом, равным шагу упоров неподвижной секции, дополнительными управляемыми фиксаторами, смонтированными в верхней части неподвижной секции и выполненными с возможностью взаимодействия с упорами подвижной секции, и грузозахватными траверсами, имеющими узлы соединения с подвесками и грузовой площадкой, а неподвижная секция выполнена с окнами, размещенными в зоне упоров подвижной секции под дополнительными управляемыми фиксаторами и выполненными высотой каждое, превышающей шаг этих упоров, при этом подвески выполнены жесткими, управляемые фиксаторы грузовой площадки размещены на ней с возможностью взаимодействия через окна с упорами подвижной секции, а силовой механизм смонтирован между грузовой площадкой и кольцом.
2. Телескопический подъемник, по п. 1, отличающийся тем, что неподвижная секция башни выполнена составной, по меньшей мере, из двух частей, связанных разъемным соединением, при этом нижняя выполнена высотой не меньшей высоты, занимаемой грузовой площадкой в совокупности с кольцом.
3. Телескопический подъемник по п. 1, отличающийся тем, что каждый узел соединения траверс с подвесками включает в себя проушину, смонтированную на конце подвески, палец, установленный в направляющих втулках, выполненных на траверсе, и подпружиненный рычаг, одно плечо которого шарнирно связано с упомянутым пальцем, при этом на траверсе смонтирован фиксатор для взаимодействия со вторым плечом рычага.
4. Телескопический подъемник по п. 1, отличающийся тем, что каждый узел соединения траверс с грузовой площадкой включает в себя палец, установленный в вертикальной направляющей втулке, выполненной в траверсе, и соответствующее гнездо, выполненное в грузовой площадке для упомянутого пальца, при этом в вертикальной направляющей втулке выполнен Г-образной паз, в котором размещен рычаг связанный с пальцем.
Текст
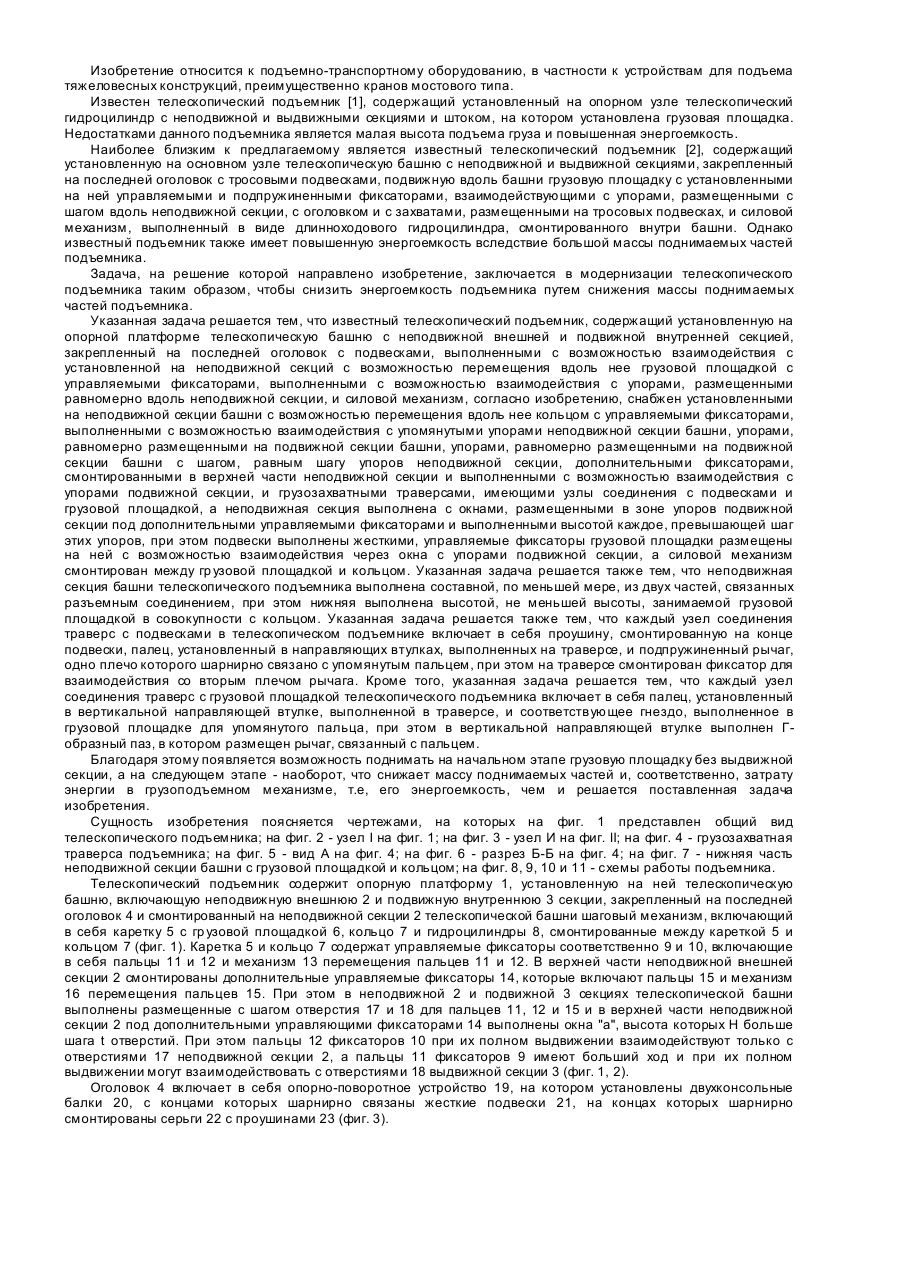
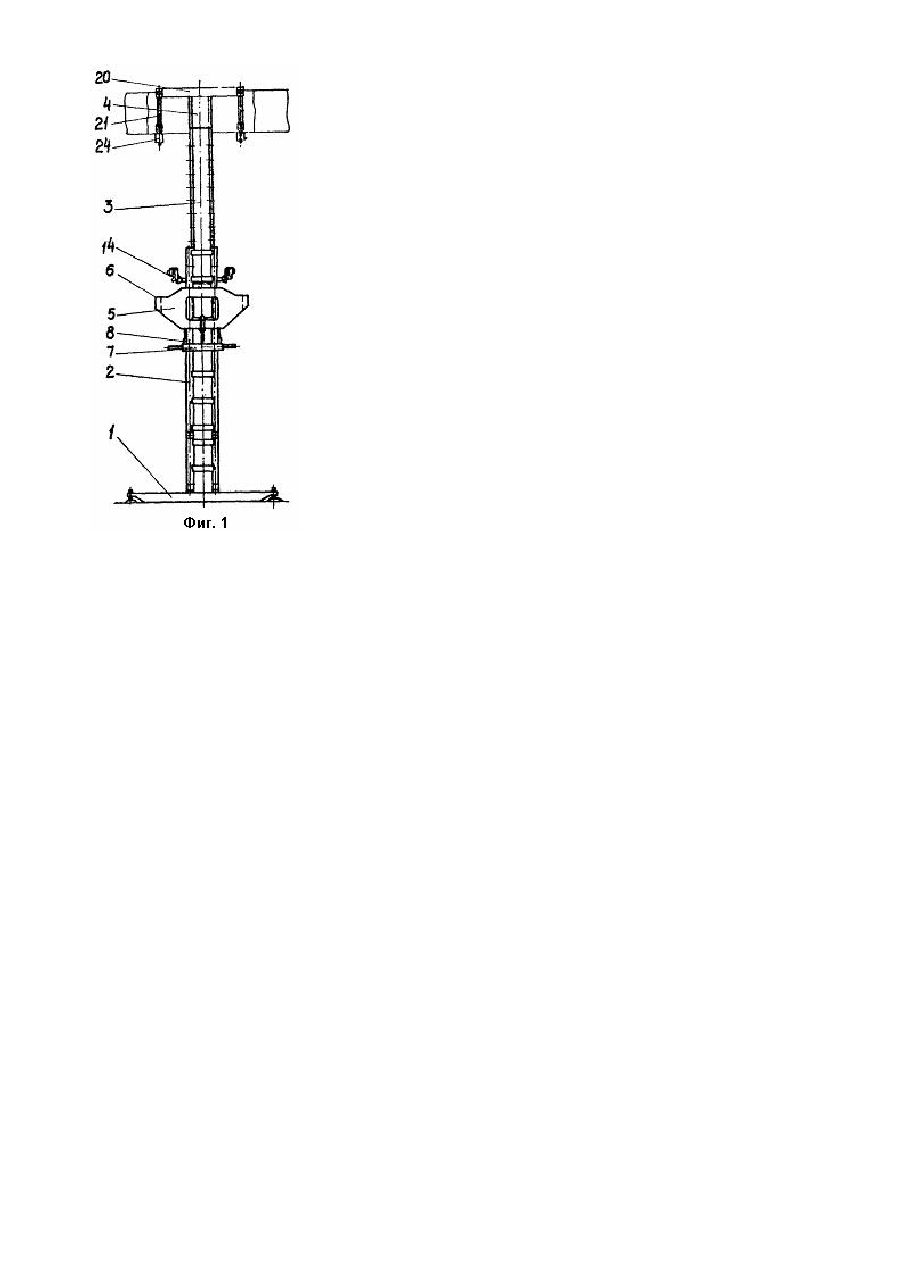
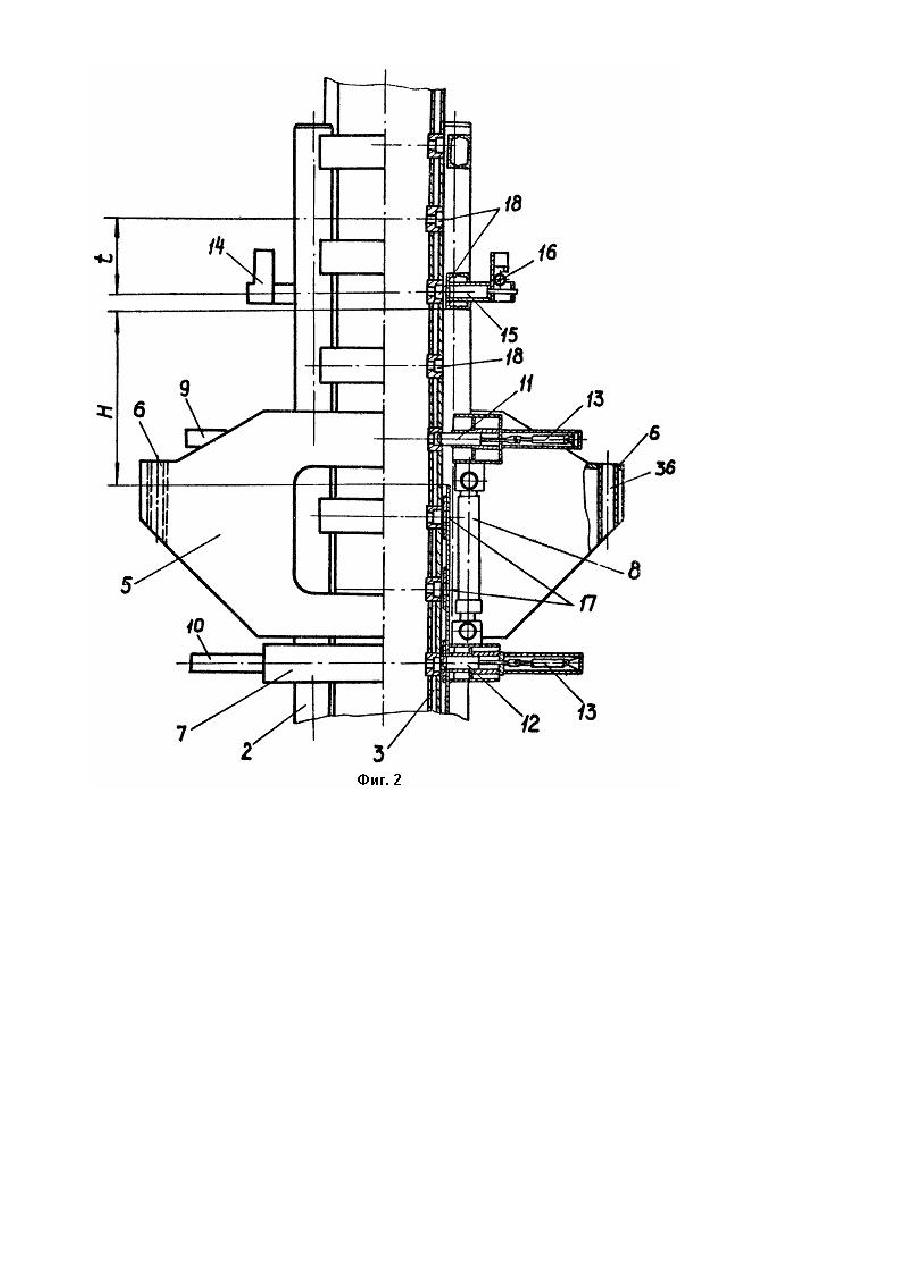
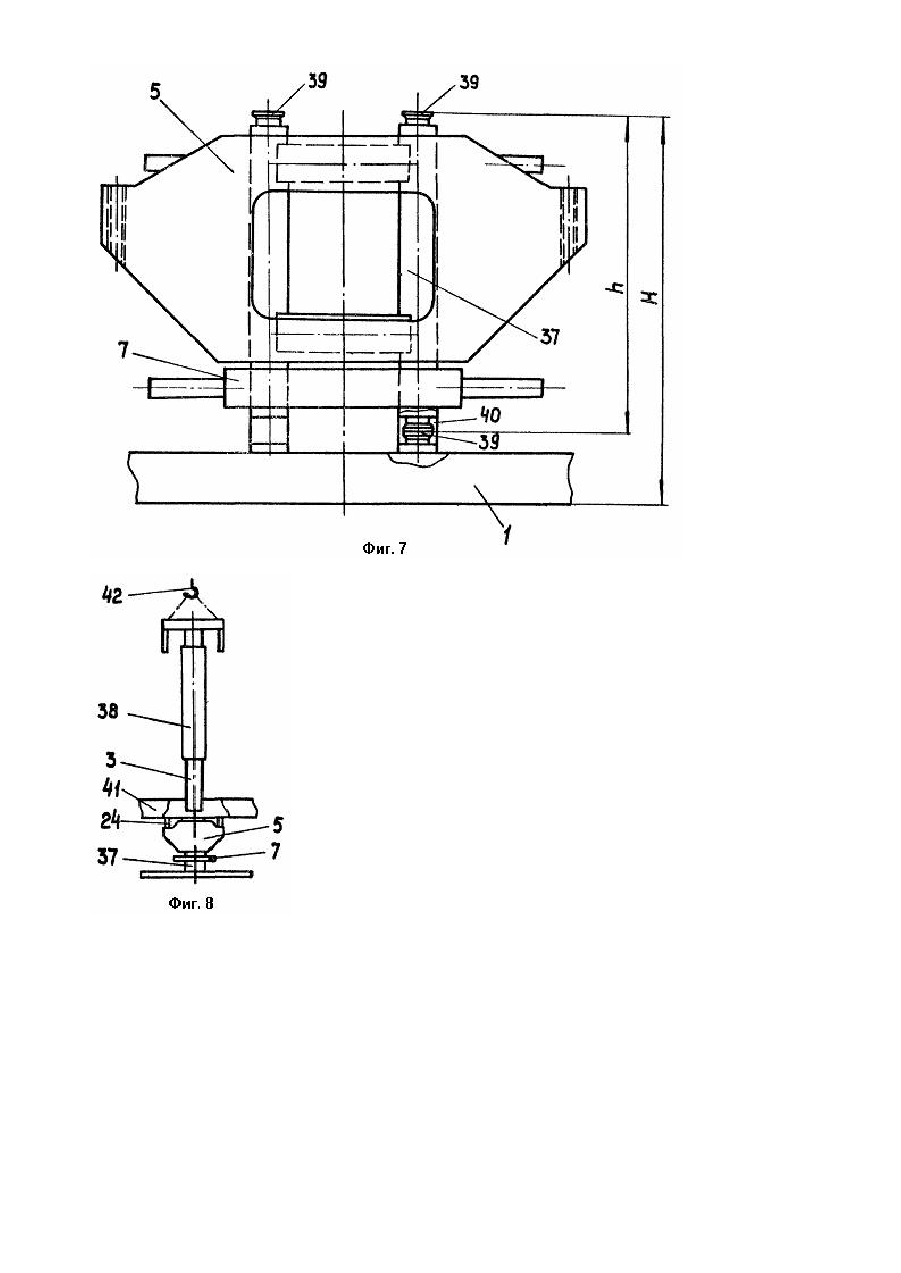
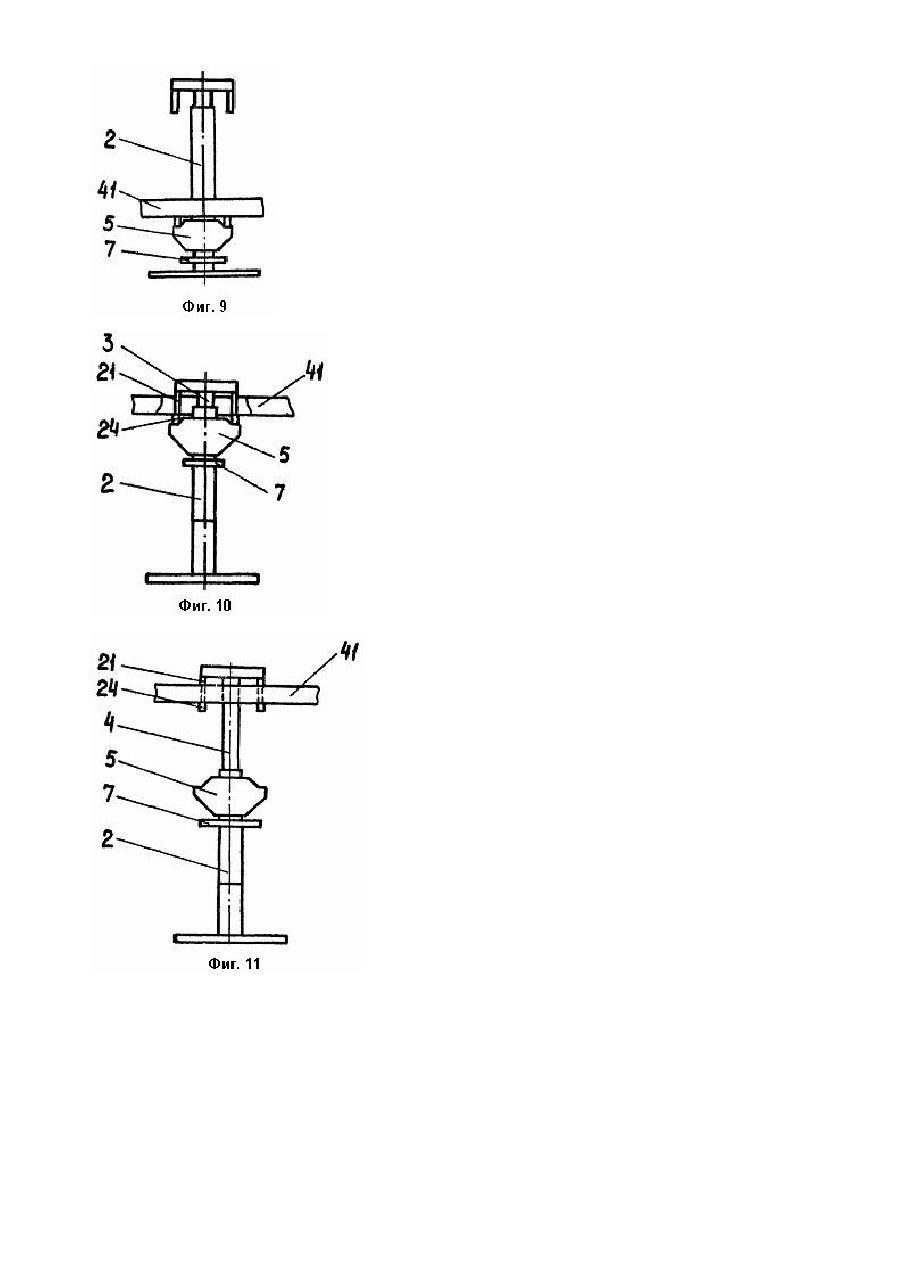
Изобретение относится к подъемно-транспортному оборудованию, в частности к устройствам для подъема тяжеловесных конструкций, преимущественно кранов мостового типа. Известен телескопический подъемник [1], содержащий установленный на опорном узле телескопический гидроцилиндр с неподвижной и выдвижными секциями и штоком, на котором установлена грузовая площадка. Недостатками данного подъемника является малая высота подъема груза и повышенная энергоемкость. Наиболее близким к предлагаемому является известный телескопический подъемник [2], содержащий установленную на основном узле телескопическую башню с неподвижной и выдвижной секциями, закрепленный на последней оголовок с тросовыми подвесками, подвижную вдоль башни грузовую площадку с установленными на ней управляемыми и подпружиненными фиксаторами, взаимодействующими с упорами, размещенными с шагом вдоль неподвижной секции, с оголовком и с захватами, размещенными на тросовых подвесках, и силовой механизм, выполненный в виде длинноходового гидроцилиндра, смонтированного внутри башни. Однако известный подъемник также имеет повышенную энергоемкость вследствие большой массы поднимаемых частей подъемника. Задача, на решение которой направлено изобретение, заключается в модернизации телескопического подъемника таким образом, чтобы снизить энергоемкость подъемника путем снижения массы поднимаемых частей подъемника. Указанная задача решается тем, что известный телескопический подъемник, содержащий установленную на опорной платформе телескопическую башню с неподвижной внешней и подвижной внутренней секцией, закрепленный на последней оголовок с подвесками, выполненными с возможностью взаимодействия с установленной на неподвижной секций с возможностью перемещения вдоль нее грузовой площадкой с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упорами, размещенными равномерно вдоль неподвижной секции, и силовой механизм, согласно изобретению, снабжен установленными на неподвижной секции башни с возможностью перемещения вдоль нее кольцом с управляемыми фиксаторами, выполненными с возможностью взаимодействия с упомянутыми упорами неподвижной секции башни, упорами, равномерно размещенными на подвижной секции башни, упорами, равномерно размещенными на подвижной секции башни с шагом, равным шагу упоров неподвижной секции, дополнительными фиксаторами, смонтированными в верхней части неподвижной секции и выполненными с возможностью взаимодействия с упорами подвижной секции, и грузозахватными траверсами, имеющими узлы соединения с подвесками и грузовой площадкой, а неподвижная секция выполнена с окнами, размещенными в зоне упоров подвижной секции под дополнительными управляемыми фиксаторами и выполненными высотой каждое, превышающей шаг этих упоров, при этом подвески выполнены жесткими, управляемые фиксаторы грузовой площадки размещены на ней с возможностью взаимодействия через окна с упорами подвижной секции, а силовой механизм смонтирован между гр узовой площадкой и кольцом. Указанная задача решается также тем, что неподвижная секция башни телескопического подъемника выполнена составной, по меньшей мере, из двух частей, связанных разъемным соединением, при этом нижняя выполнена высотой, не меньшей высоты, занимаемой грузовой площадкой в совокупности с кольцом. Указанная задача решается также тем, что каждый узел соединения траверс с подвесками в телескопическом подъемнике включает в себя проушину, смонтированную на конце подвески, палец, установленный в направляющих втулках, выполненных на траверсе, и подпружиненный рычаг, одно плечо которого шарнирно связано с упомянутым пальцем, при этом на траверсе смонтирован фиксатор для взаимодействия со вторым плечом рычага. Кроме того, указанная задача решается тем, что каждый узел соединения траверс с грузовой площадкой телескопического подъемника включает в себя палец, установленный в вертикальной направляющей втулке, выполненной в траверсе, и соответствующее гнездо, выполненное в грузовой площадке для упомянутого пальца, при этом в вертикальной направляющей втулке выполнен Гобразный паз, в котором размещен рычаг, связанный с пальцем. Благодаря этому появляется возможность поднимать на начальном этапе грузовую площадку без выдвижной секции, а на следующем этапе - наоборот, что снижает массу поднимаемых частей и, соответственно, затрату энергии в грузоподъемном механизме, т.е, его энергоемкость, чем и решается поставленная задача изобретения. Сущность изобретения поясняется чертежами, на которых на фиг. 1 представлен общий вид телескопического подъемника; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - узел И на фиг. II; на фиг. 4 - грузозахватная траверса подъемника; на фиг. 5 - вид А на фиг. 4; на фиг. 6 - разрез Б-Б на фиг. 4; на фиг. 7 - нижняя часть неподвижной секции башни с грузовой площадкой и кольцом; на фиг. 8, 9, 10 и 11 - схемы работы подъемника. Телескопический подъемник содержит опорную платформу 1, установленную на ней телескопическую башню, включающую неподвижную внешнюю 2 и подвижную внутреннюю 3 секции, закрепленный на последней оголовок 4 и смонтированный на неподвижной секции 2 телескопической башни шаговый механизм, включающий в себя каретку 5 с гр узовой площадкой 6, кольцо 7 и гидроцилиндры 8, смонтированные между кареткой 5 и кольцом 7 (фиг. 1). Каретка 5 и кольцо 7 содержат управляемые фиксаторы соответственно 9 и 10, включающие в себя пальцы 11 и 12 и механизм 13 перемещения пальцев 11 и 12. В верхней части неподвижной внешней секции 2 смонтированы дополнительные управляемые фиксаторы 14, которые включают пальцы 15 и механизм 16 перемещения пальцев 15. При этом в неподвижной 2 и подвижной 3 секциях телескопической башни выполнены размещенные с шагом отверстия 17 и 18 для пальцев 11, 12 и 15 и в верхней части неподвижной секции 2 под дополнительными управляющими фиксаторами 14 выполнены окна "а", высота которых Н больше шага t отверстий. При этом пальцы 12 фиксаторов 10 при их полном выдвижении взаимодействуют только с отверстиями 17 неподвижной секции 2, а пальцы 11 фиксаторов 9 имеют больший ход и при их полном выдвижении могут взаимодействовать с отверстиями 18 выдвижной секции 3 (фиг. 1, 2). Оголовок 4 включает в себя опорно-поворотное устройство 19, на котором установлены двухконсольные балки 20, с концами которых шарнирно связаны жесткие подвески 21, на концах которых шарнирно смонтированы серьги 22 с проушинами 23 (фиг. 3). Подъемник содержит также грузозахватные траверсы 24, в которых выполнена продольная прорезь 25 для проушин 23, связанных посредством пальцев 26, подвижно установленных в направляющих втулках 27, 28, выполненных на траверсах 24 симметрично прорези 25. Каждый из пальцев 26 шарнирно связан с одним плечом двуплечего рычага 29, шарнирно смонтированного на траверсе 24 и связанного с ней пружиной 30. При этом второе плечо двуплечего рычага 29 имеет возможность взаимодействовать с фиксатором 31, смонтированным на траверсе 24. Кроме того, каждая из грузозахватных траверс 24 включает в себя пальцы 32, каждый из которых подвижно установлен в вертикальной направляющей втулке 33, выполненной в траверсе 24 (фиг. 3, 4). Во втулке 33 выполнен Г-образный паз 34, в котором размещен рычаг, связанный с пальцем 32. При этом в грузовых площадках 6 каретки 5 выполнены вертикальные гнезда 36 для пальцев 32 грузозахватных траверс 24 (фиг. 5). Неподвижная секция 2 телескопической башни может быть выполнена составной, по меньшей мере, из двух частей 37, 38, нижняя 37 из которых выполнена наименьшей высоты достаточной для размещения на ней каретки 5 с кольцом 7. Нижняя 37 и верхняя 38 части неподвижной секции 2 соединены между собой и нижняя часть 37 соединена с опорной рамой 1 посредством быстроразъемных соединений, включающих в себя пальцы 39 с буртиками на концах и разрезную втулку 40 с выточкой под буртики пальцев 39 (фиг. 7). Телескопический подъемник работает следующим образом. Собирают монтируемую конструкцию, например мостовой кран 41, на временных опорах (не показаны), высота которых превышает высоту Н (фиг. 7) опорной рамы 1 с нижней частью 37 неподвижной секции 2. Затем опорную раму 1 с нижней частью 37 секции 2, на которой смонтирован шаговый механизм (каретка 5, кольцо 7 и гидроцилиндры 8) устанавливают под мостом крана 41. Грузозахватные траверсы 24 заводят между мостом крана 41 и грузовыми площадками при этом пальцы 32 подняты и зафиксированы рычагами 35 в Г-образных пазах 34. После этого расфиксируют пальцы 32 и опускают их в гнезда 36 грузовых площадок 6. Посредством вспомогательного грузоподъемного механизма 42 верхняя часть 38 неподвижной секции 2 и выдвижная секция 3, зафиксированные друг с другом посредством фиксаторов 14, через проем между полумостами крана 41 монтируются на нижней части 37 неподвижной секции 2. После монтажа подъемника посредством шагового механизма осуществляют подъем крана 41, перемещая шаговый механизм с грузозахватными траверсами 24 и установленным на них краном 41 по неподвижной секции 2. При этом кольцо 7 и каретка 5 посредством фиксаторов 10, 9 поочередно фиксируется на неподвижной секции 2, а гидроцилиндры 8 поочередно работают на выдвижение и втягивание их штоков. При достижении шаговым механизмом верхнего положения (фиг. 1, 10), при котором проушины 23 входят в прорези 25 траверс 24, расфиксируют друплечие рычаги 29 и под действием пружин 30 пальцев 26 вводятся в отверстие проушин 23 и втулок 28, соединяя таким образом грузозахватные траверсы 24 с подвесками 21. Затем, опустив каретку 5, вводят пальцы 11 фиксаторов 9 каретки 5 через окна "а" в отверстия 18 выдвижной секции 3 при этом пальцы 12 фиксаторов 10 кольца 7 введены в отверстия 17 неподвижной секции 2 и штоки гидроцилиндров 8 задвинуты (фиг. 2). После этого посредством шагового механизма производят выдвижение секции 3 с монтируемым краном 41. Для этого пальцы фиксаторов 14, выводят из отверстий 18 (фиг. 2) и осуществляют выдвижение секции 3 на один шаг t, выдвигая штоки гидроцилиндров 8. При этом прорези "а" обеспечивают возможность перемещения фиксаторов 9 относительно секции 2. При выдвижении секции 3 на шаг t пальцы 15 вводят в отверстия 18, а пальцы 11 выводят. Затем опускают каретку 5 на один шаг t и вводят пальцы 11 в соответствующие отверстия 18. После выведения пальцев 15 из отверстий 18 осуществляют выдвижение секции 3 на второй шаг t. Аналогично производят выдвижение секции 3 до достижения краном 41 требуемой высоты, разворачивают и устанавливают кран 41 в проектное положение на подкрановые пути (не показано). Затем производят опускание секции 3 и шагового механизма в обратном порядке и демонтируют подъемник.
ДивитисяДодаткова інформація
Назва патенту англійськоюTelescopic hoist
Автори англійськоюVakulenko Borys Ivanovych, Ivanov Ivan Vasyliovych, Sytnyk Mykola Petrovych, Tiushka Mykhailo Mykhailovych, Zaslavskyi Mark Symonovych, Koniakhin Heorhii Petrovych, Pidhorodetskyi Valentyn Petrovych
Назва патенту російськоюТелескопический подъемник
Автори російськоюВакуленко Борис Иванович, Иванов Иван Васильевич, Сытник Николай Петрович, Тюшка Михаил Михайлович, Заславский Марк Симонович, Коняхин Георгий Петрович, Подгородецкий Валентин Петрович
МПК / Мітки
МПК: B66F 11/00, B66F 7/10
Мітки: підйомник, телескопічний
Код посилання
<a href="https://ua.patents.su/7-4065-teleskopichnijj-pidjjomnik.html" target="_blank" rel="follow" title="База патентів України">Телескопічний підйомник</a>
Телескопічний підйомник
Номер патенту: 4314
Опубліковано: 27.12.1994
Автори: Лещинський Олександр Аронович, Киянов Іван Дмитрович, Лисюк Григорій Микитович, Цаберябий Володимир Семенович, Бічуч Адольф Ілліч
МПК: B66F 11/00
Мітки: телескопічний, підйомник
Формула / Реферат:
1. Телескопический подъемник, содержащий установленный на опорном узле телескопический грузоподъемный стержень с неподвижной и выдвижной секциями, закрепленную на последней рабочую площадку и механизм выдвижения, отличающийся тем, что, с целью расширения области применения путем подъема груза с земли, он снабжен размещенными на различной высоте неподвижной секции с шагом не более хода выдвижной секции упорами, смонтированной с...
Підйомник
Номер патенту: 2231
Опубліковано: 26.12.1994
Автори: Дудик Валентин Іванович, Матюха Віктор Опанасович, Підвальний Петро Григорович, Биковець Віктор Прохорович
МПК: B65G 17/16
Мітки: підйомник
Формула / Реферат:
1. Подъемник, включающий две параллельные цепи, на каждой из которых установлены держатели, отличающийся тем, что, с целью расширения технологических возможностей, держатели одной цепи выполнены подпружиненными и размещены со смещением на полшага цепи относительно держателей, закрепленных на другой цепи.2. Подъемник по п. 1, отличающийся тем, что каждый держатель выполнен в виде диска, причем диски подпружиненных держателей...
Кроковий підйомник
Номер патенту: 4345
Опубліковано: 27.12.1994
Автори: Тюшка Михайло Михайлович, Ситник Микола Петрович, Іванов Іван Васильович
МПК: B66F 1/00
Формула / Реферат:
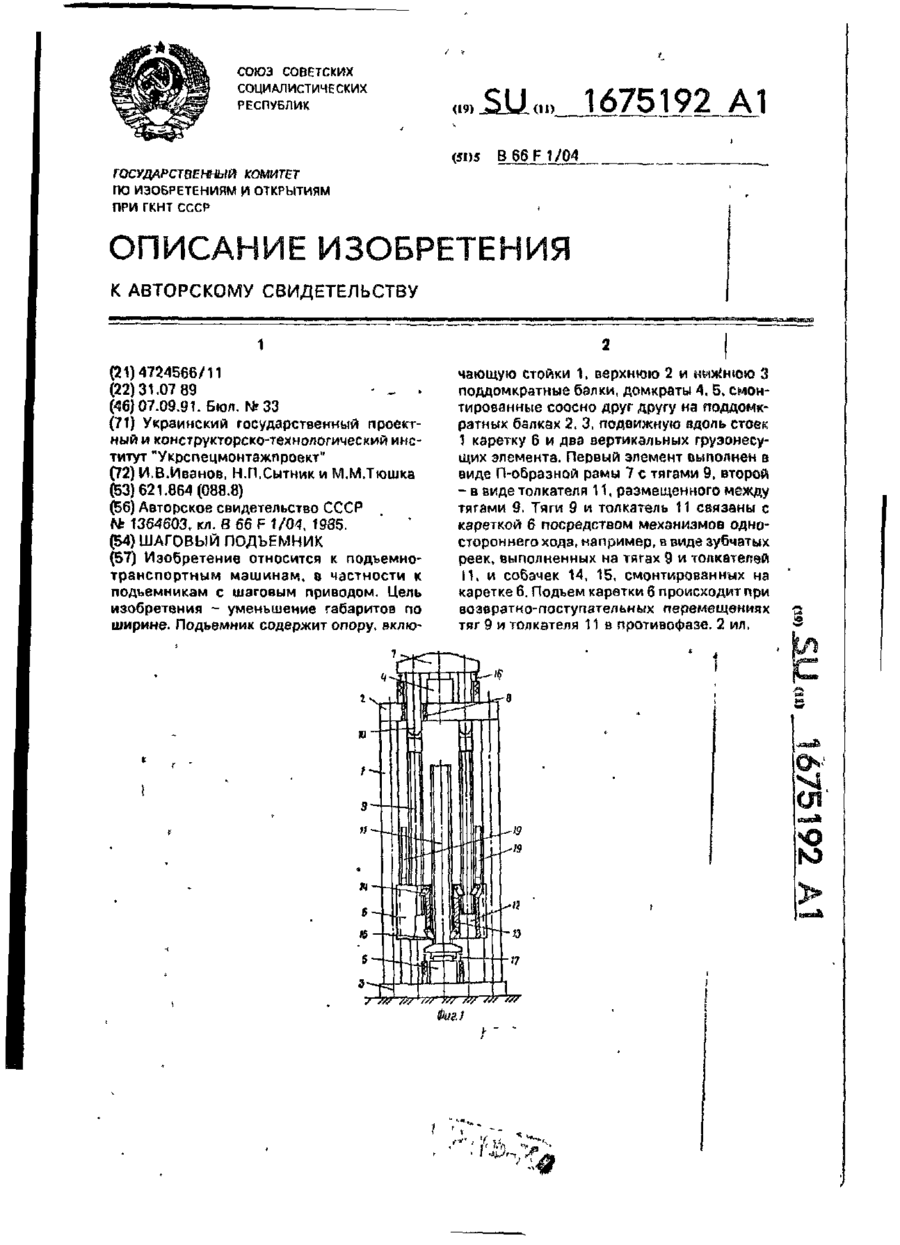
Шаговый подъемник, содержащий опору со стойками и связанной с их верхними концами поддомкратной балкой, домкраты, один из которых размещен на указанной поддомкратной балке, имеющие упоры вертикальные грузоподъемные элементы, два из которых соединены в верхней части поперечиной, связанной с одним из домкратов, и грузонесущую каретку с механизмами фиксации одностороннего действия для соединения их подвижных органов с упорами вертикальных...
Дистанційно керований кінооператорський кран
Номер патенту: 2836
Опубліковано: 26.12.1994
Автор: Кокуш Анатолій Якимович
МПК: G03B 17/00, B66C 23/72
Мітки: кран, дистанційно, кінооператорський, керований
Формула / Реферат:
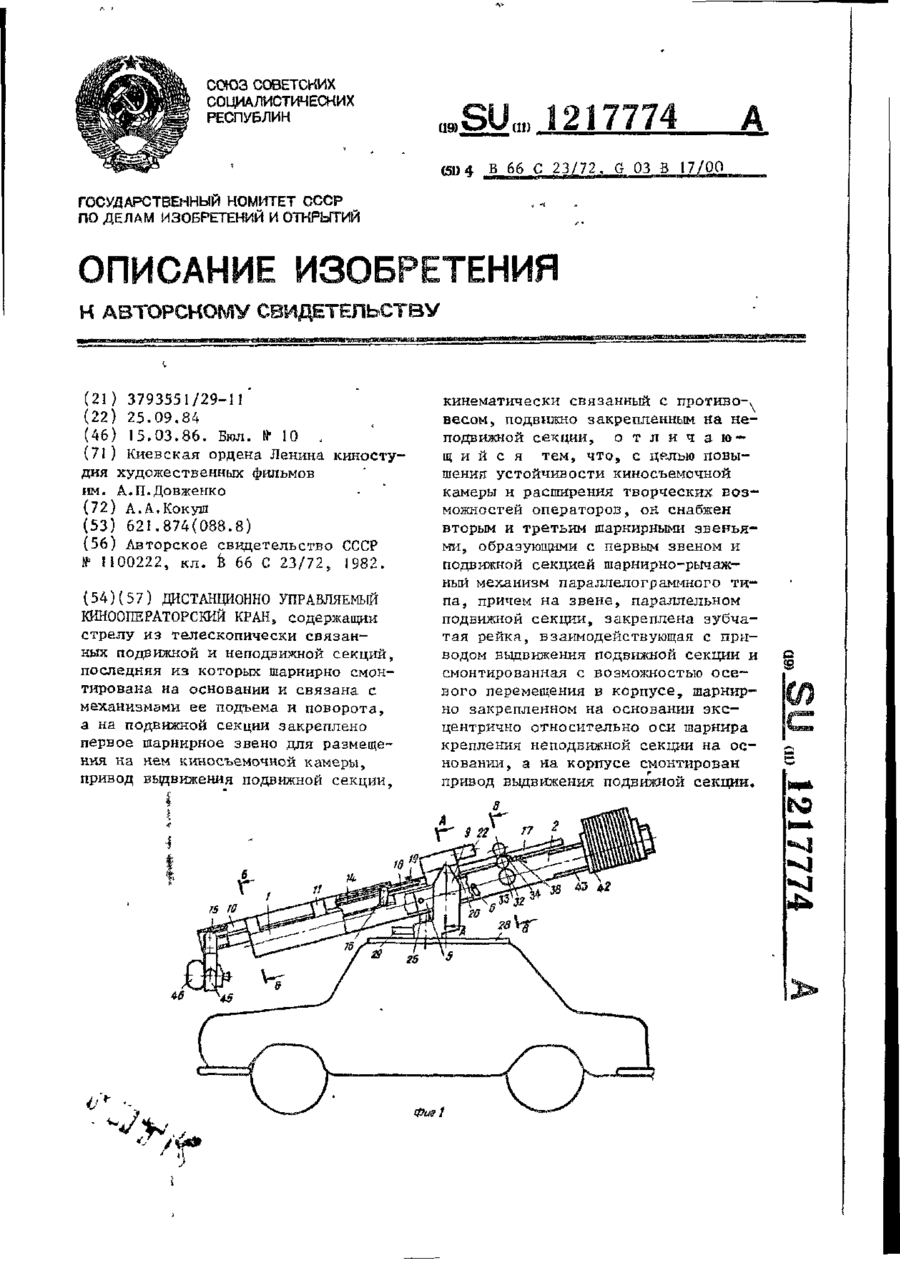
Дистанционно управляемый кинооператорский кран, содержащий стрелу из телескопически связанных подвижной и неподвижной секций, последняя их которых шарнирно смонтирована на основании и связана с механизмами ее подъема и поворота, а на подвижной секции закреплено первое шарнирное звено для размещения на нем киносъемочной камеры, привод выдвижения подвижной секции, кинематически связанный с противовесом, подвижно закрепленным на неподвижной...
Ротор вітродвигуна

Номер патенту: 768
Опубліковано: 15.12.1993
Автор: Бурлака Трохим Андрійович
МПК: F03D 7/04
Мітки: вітродвигуна, ротор
Формула / Реферат:
Формула изобретенияРотор ветродвигателя, содержащий полый вал и установленное на нем рабочее колесо с телескопическими лопастями, каждая из которых состоит из подвижной и неподвижной частей, причем подвижные части лопастей связаны припомощи расположенного в полости вала троса с приводным механизмом, отличающийся тем, что, с целью автоматического регулирования частоты вращения рабочего колеса, подвижная часть каждой лопасти подпружинена...