Телескопічний підйомник
Номер патенту: 4314
Опубліковано: 27.12.1994
Автори: Цаберябий Володимир Семенович, Лещинський Олександр Аронович, Лисюк Григорій Микитович, Бічуч Адольф Ілліч, Киянов Іван Дмитрович
Формула / Реферат
1. Телескопический подъемник, содержащий установленный на опорном узле телескопический грузоподъемный стержень с неподвижной и выдвижной секциями, закрепленную на последней рабочую площадку и механизм выдвижения, отличающийся тем, что, с целью расширения области применения путем подъема груза с земли, он снабжен размещенными на различной высоте неподвижной секции с шагом не более хода выдвижной секции упорами, смонтированной с возможностью перемещения вдоль грузоподъемного стержня грузовой площадкой с установленными на ней подпружиненными и управляемыми кулачками, взаимодействующими с указанными упорами и рабочей площадкой, на которой размещена тросовая подвеска с захватами для взаимодействия с подпружиненными кулачками грузовой площадки.
2. Подъемник по п. 1, отличающийся тем, что рабочая площадка установлена на выдвижной секции шарнирно с возможностью поворота вокруг вертикальной оси.
Текст
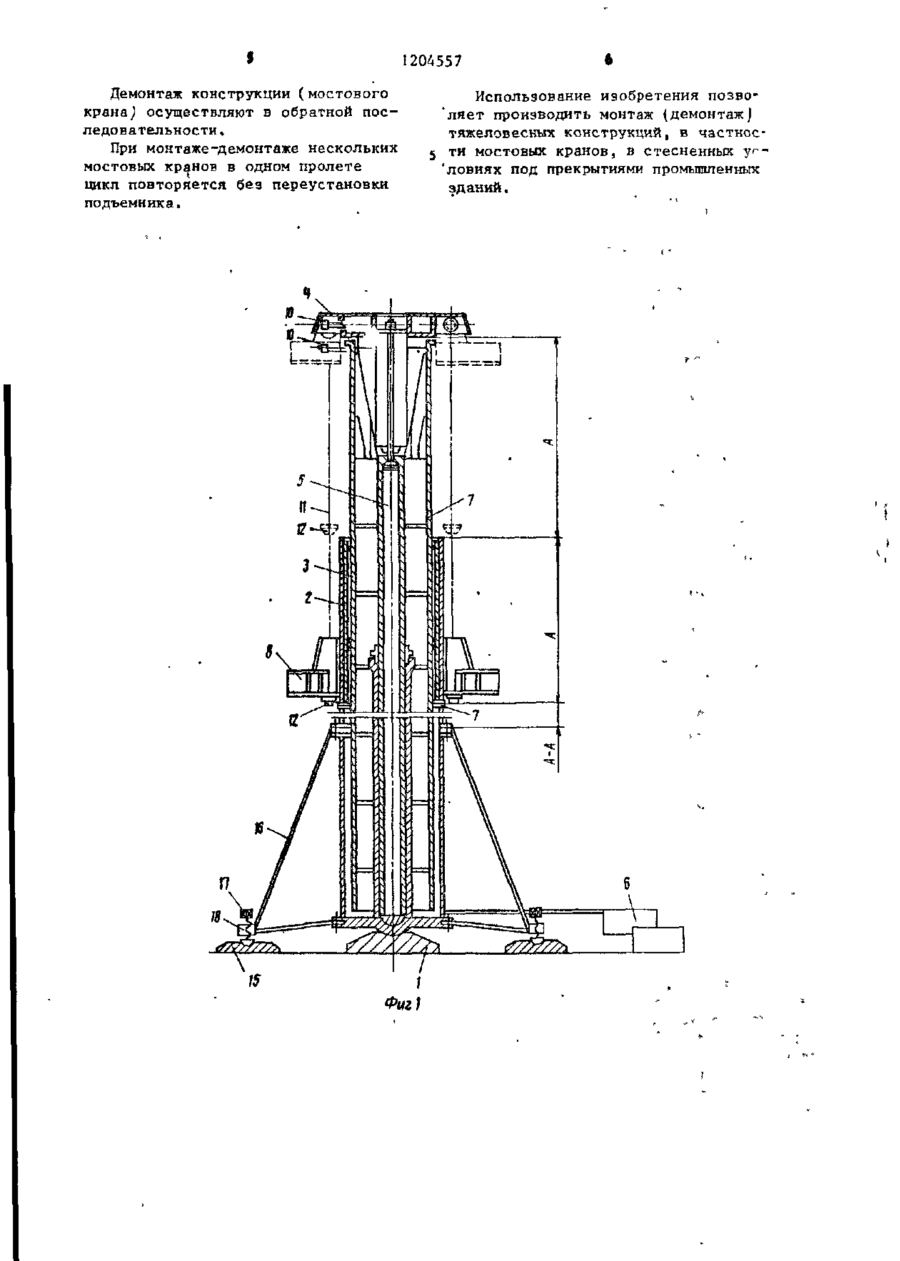
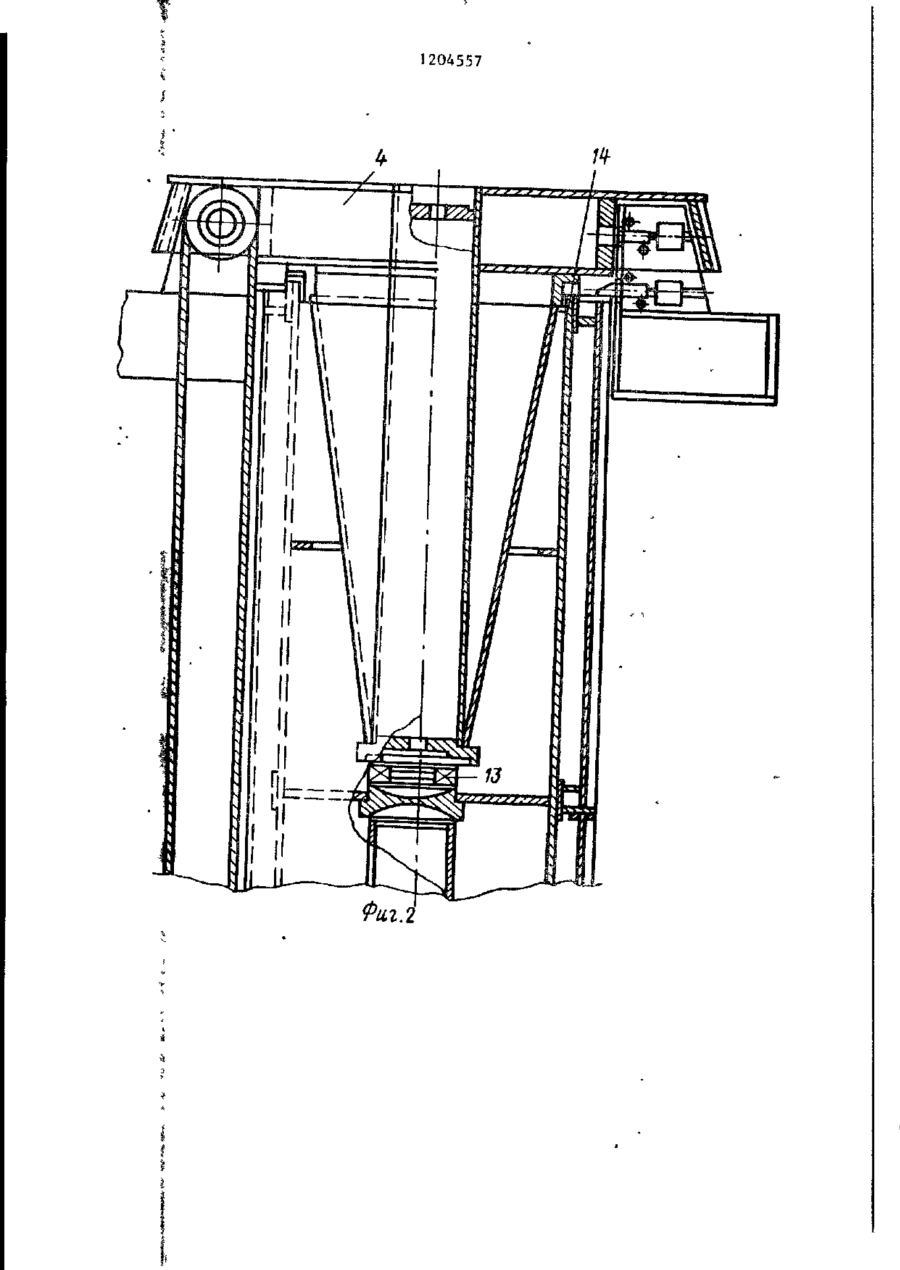
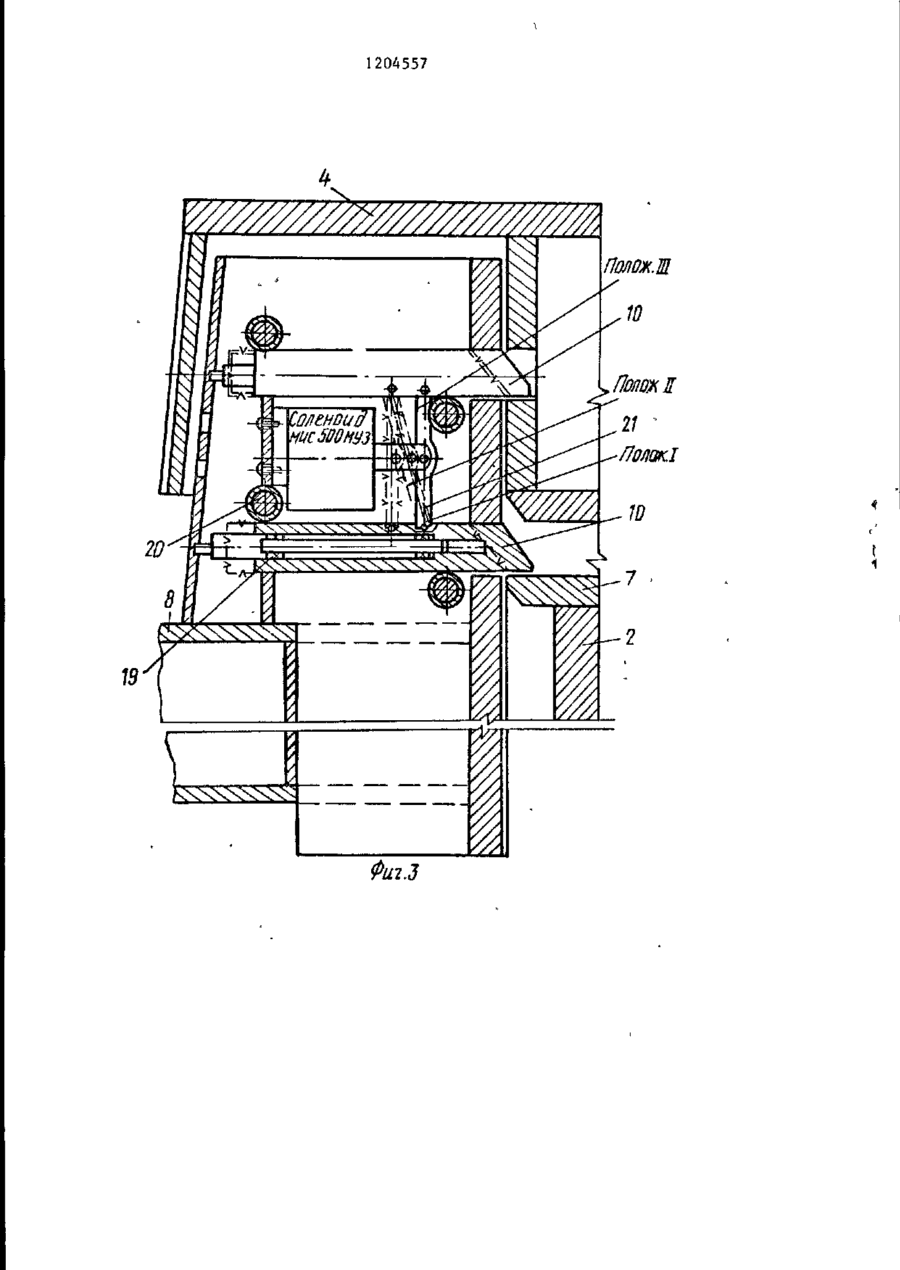
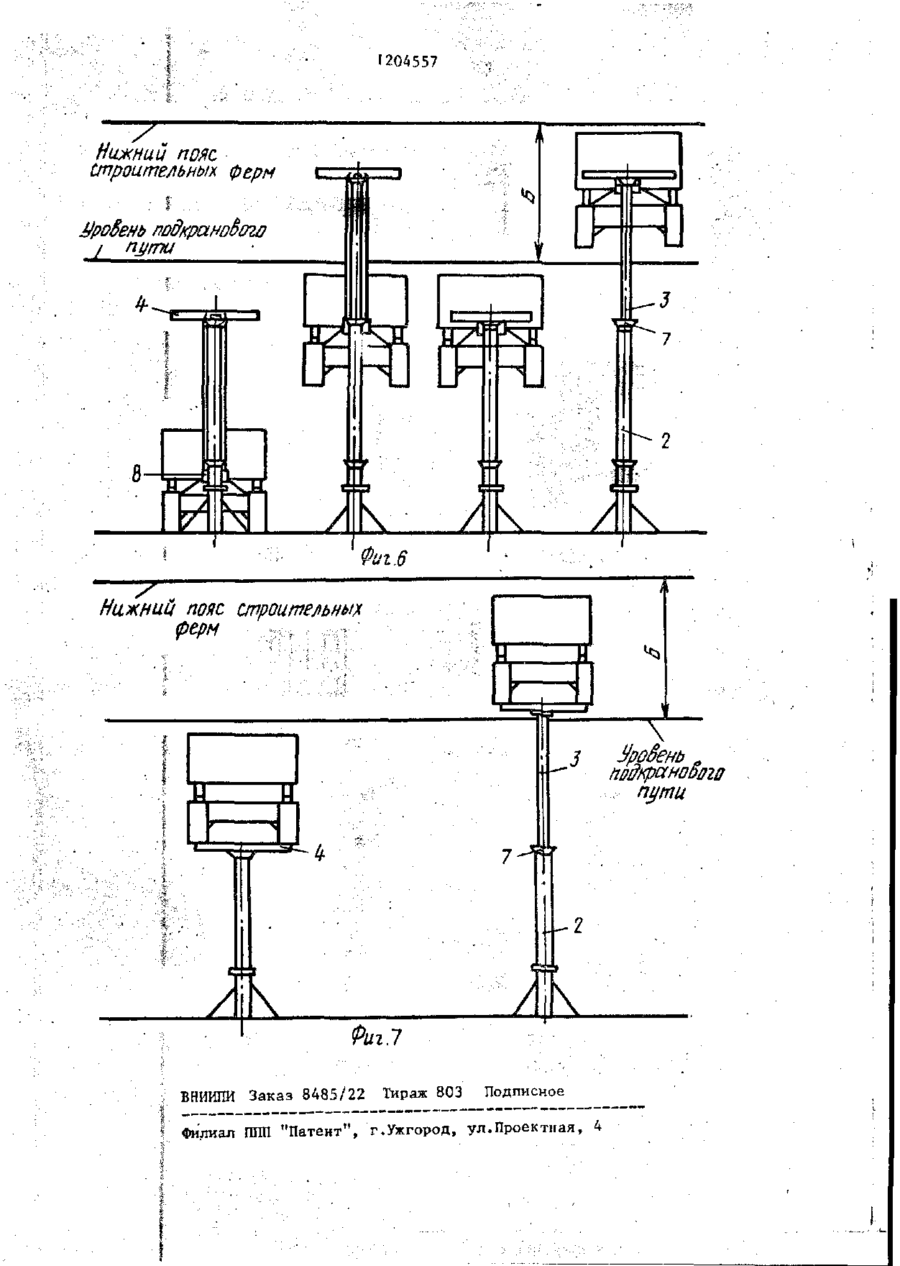
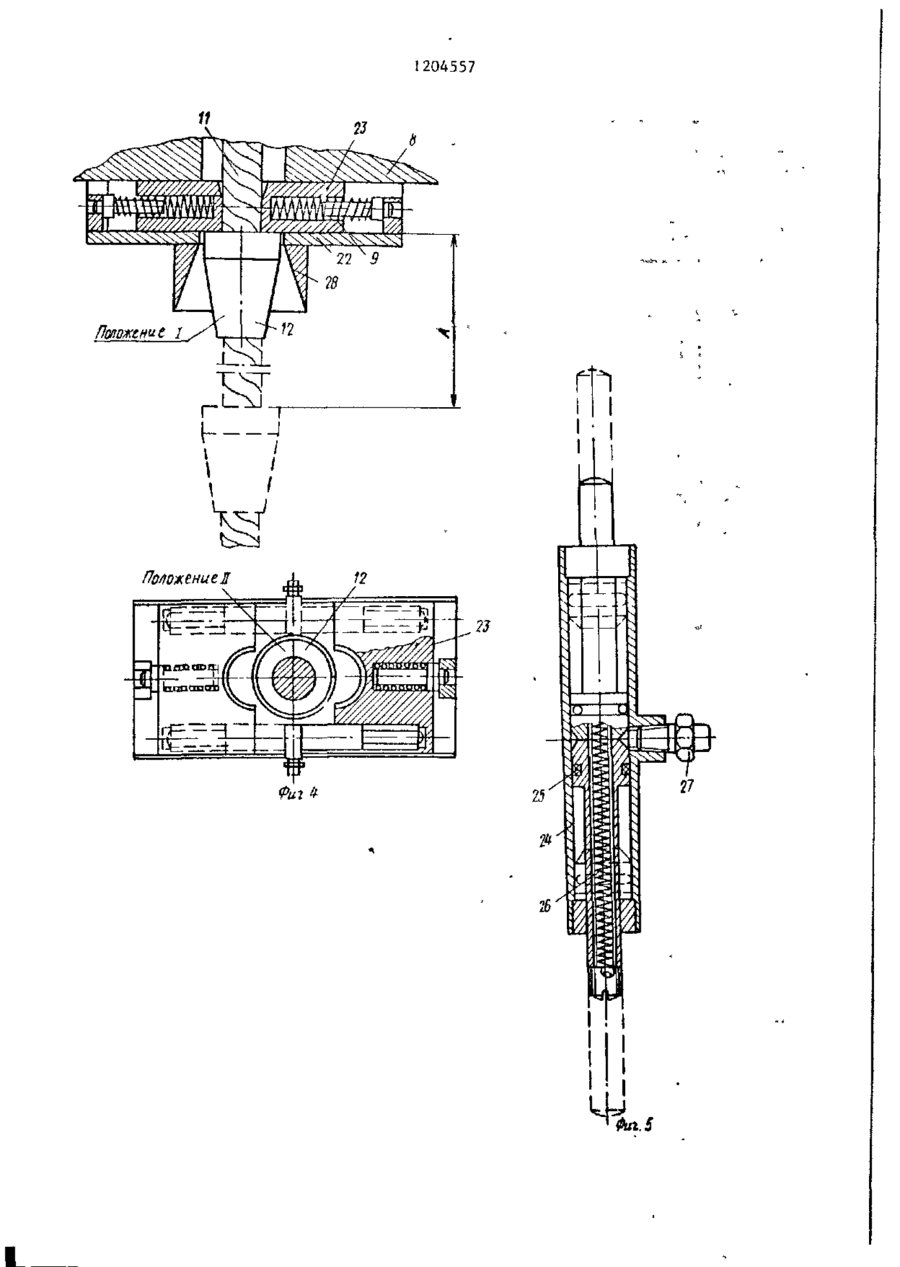
1. ТЕЛЕСКОПИЧЕСКИЙ ПОДЪЕМНИК, содержащий установленный на опорном узле телескопический грузоподъемный стержень с неподвижной и выдвижной секциями, закрепленную на последней рабочую площадку и механизм выдвижения, о т л и ч а ю щ и й с я тем, что, с целью расширения области применения путем подъема груза с земли, он снабжен размещенными на различной высоте неподвижной секции с шагом не более хода выдвижной секции упорами, смонтированной с возможностью перемещения вдоль грузоподъемного стержня грузовой площадкой с установленными на ней подпружиненными и управляемыми кулачками, взаимодействующими с , указанными упорами и рабочей площадкой, на которой размещена тросовая подвеска с захватами для взаимодействия с подпружиненными кулачками грузовой площадки. 2, Подъемник по п.1, о т л и ч а ю щ и й с я тем, что рабочая площадка установлена на выдвижной секции шарнирно с возможностью поворота вокруг вертикальной оси. (Л о ел ел 1204557 щаются по две пары поршней 25, стяИзобретение относится к лодъемногиваемых пружиной 26. В корпусы гидтранепортному оборудованию, в частроцилиндров жидкость подается через ности к устройствам для подъема тяштуцер 27. Для взаимодействия с зажеловесных конструкций. хватами 12 предусмотрена направляюЦель изобретения - расширение щая 28. Неподвижная секция 2 выполобласти применения путем подъема нена наборной из вставок длиной не груза с земли. более хода выдвижной секции 3. На фиг,1 показан телескопический подъемник, общий вид; на фиг.2 При подъеме выдвижной секции 3 и опорно-поворотная площадка; на фиг.З прохождении кулачков 10 через упоры конструктивная схема захвата на под7 они работают в автоматическом ревижной рамке; на фиг.4 - конструкжиме. Захваты 12 при прохождении тивная схема захвата на подвеске в вниз автоматически раздвигают от его разных положениях; на фиг.5 центра кулачки 9 при взаимодействии узел ползунов; на фиг.6 и 7 - схгчы 15 с их скошенными поверхностями под монтажа мостового крана. действием собственной массы и массы подвески I1. Кулачки 9 возвращаются Телескопический подъемник состов исходное, положение пружинами 23 и ит из установленного на опорном уз26. При опускании выдвижной секции и ле 1 телескопического стержня с неподвижной 2 и выдвижной 3 секциями 20 прохождении через упоры 7 кулачки 10 управляются соленоидом 20. Кулачки и закрепленной на последней рабочей 9 раздв-игаются от центра при прохожплощадки 4. дении захватов 12 вверх путем подачи Привод выдвижения секции 3 включажидкости в корпуса гидроцилиндров ет в себя гидроцилиндр 5 и станцию 6 25 22 и возвращаются в исходное положеуправления. ние пружинами 23 и 26 при прекращеНа неподвижной секции по ее высонии подачи жидкости. те размещены упоры 7. По грузоподъемХод h выдвижной секции 3 при исному стержню перемещается грузовая пользовании подъемника для монтажа площадка 8, снабженная подпружиненными 9 и управляемыми 10 кулачками. 30 мостовых кранов выбирается примерно равным расстоянию от подкранового На рабочей площадке 4 размещена пути до нижнего пояса стропильных тросовая подвеска 1 1, і*меющая захваферм. Высоту подъемника выбирают меты 12. нее расстояния от пола цеха до отметДля обеспечения поворота рабочей ки подкранового пути с учетом возможплощадки вокруг вертикальной оси 35 ности строповки монтируемого крана последняя установлена на горизонтальк грузовой площадке 8, не препятстно-упорный 13 и вертикально-упорный вуя работе эксплуатируемых в месте 14 подшипники. Устойчивость подъемрасположения подъемника мостовых краника обеспечивается опиранием неподнов, что позволяет использовать кравижной секции 2 на башмаки 15 крон40 ны на сборке и строповке. штейнами 16 посредством винта 17 с шаровой пятой 18. і Расстояние Е промышленных цехов > Управляемые кулачки 10 встроены меньше расстояния от пола до подкрав грузовую площадку 8 и под действиновых путей. Поэтому монтируемый 45 кран с уровня пола нельзя одним хоем пружины 19 постоянно выдвинуты. При подъеме грузовой площадки 8 кудом секции 3 поднять над подкрановылачки автоматически устанавливаются ми путями. Для обеспечения подъема при прохождении упоров 7. При опускамонтируемого крана с пола цеха при нии они принудительно убираются соудлиненной -секции 2 соответственно 50 удлиняются и подвески 11. При этом леноидом 20 посредством траверсы 21. Грузовая площадка 8 также взаимочисло захватов 12 и места их размедействует с захватами 12 тросовой щения на подвесках 1I должно соответподвески 11. На грузовой площадке 8 ствовать числу упоров 7 и местам их закреплен корпус 22 подпружиненных размещения на секции 2. кулачков 9, перемещающихся под дейст- 55 Подъемник работает по одной из вием пружины 23. следующих схем. В кулачки 9 вмонтированы корпуса Схема монтажа крана с пола здагидроцилиндров 24, в которых перемения (фиг.6) . I з ,204557 Рассмо.рим случай, когда на секции 2 размещено два упора 7. В монтируемую конструкцию (мостовой кран), установленную на полу цеха, заводят подъемник, развернув на Шарнирах кронштейны 16 таким образом, чтобы основание подъемника прошло между элементами рамы конструкции. Затем кронштейны 16 разводят для обеспечения необходимого раз-мера опорного контура.Подъемник устанавливают на пол и вращением винтов 17 добиваются вертикальности положения его оси и прилегания башмаков 15 к полу цеха. Монтируемую конструкцию закрепляют на грузовой площадке 8, которая зависит на захватах 12, Гидроцилиндром 5 выдвигают секцию 3 телескопического стержня с тросовой подвеской 11. Б этом положении кулачки 9 сдвинуты к центру и удерживаются пружинами 23 и 26. Соленоид 20 выключен, оба кулачка 10 выдвинуты пружинами 19 и скользят по секции 2. Подъем продолжается до достижения грузовой площадкой 8 с застропленным краном уровня нижнего упора 7. Кулачки 10 своими скосами проскальзывают по упору 7 и располагаются над ним. Опускают выдвижную секцию 3 до упора нижних кулачков 10 в упор. При дальнейшем опускании секции 3 захваты 12 раздвигают кулачки 9 и проходят между ними, пружины 23 и 26 возвращают кулачки 9 в исходное положение. Затем секция 3 вновь выдвигается. Захваты 12 упираются в грузовую площадку 8 и поднимают ее вместе с грузом (положение I фиг.4). Кулачки 10 выдвинуты и скользят по секции 2. Выдвижение секции 3 продолжается до подъема грузовой площадки 8 с кулачками 10 над следующим упором 7. Секция 3 снова опускается до сцепления верхних кулачков 10 с упором на рабочей площадке 4. При этом упор проскальзывает по скосу кулачков, а пружина 19 вдвигает кулачки в отверстия, расположенные на этом упоре (положение 1 фиг.З). Очередным ходом секция 3 поднимает грузовую площадку 8 с монтируемым краном над подкрановыми путями; разворачивают кран и устанавливают его в проектное положение. В случае необходимости, для попадания крано с to 15 20 25 ,Q ^ 40 *5 * вых колес на рельсы, наклон подъемника осуществляют вращением винтов 17.. Приведение подъемника в исходное состояние или демонтаж мостового крана осуществляют следующим образом. После отстроповки смонтированного крана или строповки демонтируемого крана, расположенного на под|крановых путях, грузовая площадка 8 опускается до упора нижних кулачков 10 в верхний упор 7, расцепляется с упором площадки 4, для чего включают соленоид 20, верхний кулачок 10 втягивается (положение П Лиг.З), секция 2 выдвигается, приподнимаясь над упором 7 до упора захватов 12 в грузовую площадку 8 и освобождения нижних кулачков 10 от нагрузки. Эти кулачки соленоидом 20 втягиваются (положение Щ фиг.З) и при опускании секции 3 грузовая площадка 8 на подвеске 11 опускается. После прохождения кулачков 10 через упор 7 соленоиды 20 включают и кулачки пружинами 19 возвращаются в исходное положение 1. При дальнейшем опускании грузовой площадки она фиксируется нижними кулачками 10 на нижнем упоре 7, освобождая тем самым захват 12 от нагрузки. Подается жидкость в корпус гидроцилиндра 24 и при подъеме секции 3 захват 12 проходит через отверстие между ползунами, после чего подача 'жидкости прекращается и поднявшийся к этому моменту захват упирается в кулачки. Цикл опускания повторяется, приводя подъемник в исходное состояние для подъема (опускания^ следующего монтируемого (демонтируемого крана). Схема монтажа крана при установке его на рабочую площадку 4 (фиг.7). Конструкцию ^мостовой кран) устанавливают действующим мостовым кра-. ном ( или другим грузоподъемным меха50 низмом) нл рабочую площадку 4 подъемника. Мостовой кран с помощью гидроцилиндра 5 поднимают над подкрановыми рельсами, выдвигая секцию 3 телескопического стержня, развора55 чивают на опорно-поворотном устройстве и опускают на подкрановые рельсы. Грузовая площадка и подвеска в этом случае в подъеме не участвуют. 1204557 Демонтаж конструкции (мостового крана_) осуществляют в обратной последовательности , При монтаже-демонтаже нескольких мостовых кранов в одном пролете цикл повторяется без переустановки подъемника. Фиг) Использование изобретения позво'ляет производить монтаж (демонтаж) тяжеловесных конструкций, в частности мостовых кранов, в стесненных у-'ловиях под прекрытиями промышленных зданий. 1204557 Риг.2 1204557 Полож.Ш Фиг.З 1204557 Нижний пояс Строительных ферм подкраноёш / пути j HZ! D Ь 7 Q ы Нижний пояс строительных ферм Ц 3 Риг! БНИИПИ Заказ 8485/22 Тираж 803 4 Подписное Филиал П П "Патент", г.Ужгород, ул.Проектная, 4 П ве ра пути 1204557 Фиг * f.
ДивитисяДодаткова інформація
Назва патенту англійськоюTelescopic hoist
Автори англійськоюTsaberiabyi Volodymyr Semenovych, Lysiuk Hryhorii Mykytovych, Bichuch Adolf Illich, Kyianov Ivan Dmytrovych, Leschynskyi Oleksandr Aronovych
Назва патенту російськоюТелескопический подъемник
Автори російськоюЦаберябий Владимир Семенович, Лысюк Григорий Никитович, Бичуч Адольф Ильич, Киянов Иван Дмитриевич, Лещинский Александр Аронович
МПК / Мітки
МПК: B66F 11/00
Мітки: підйомник, телескопічний
Код посилання
<a href="https://ua.patents.su/8-4314-teleskopichnijj-pidjjomnik.html" target="_blank" rel="follow" title="База патентів України">Телескопічний підйомник</a>
Підйомник
Номер патенту: 2231
Опубліковано: 26.12.1994
Автори: Дудик Валентин Іванович, Матюха Віктор Опанасович, Підвальний Петро Григорович, Биковець Віктор Прохорович
МПК: B65G 17/16
Мітки: підйомник
Формула / Реферат:
1. Подъемник, включающий две параллельные цепи, на каждой из которых установлены держатели, отличающийся тем, что, с целью расширения технологических возможностей, держатели одной цепи выполнены подпружиненными и размещены со смещением на полшага цепи относительно держателей, закрепленных на другой цепи.2. Подъемник по п. 1, отличающийся тем, что каждый держатель выполнен в виде диска, причем диски подпружиненных держателей...
Кроковий підйомник
Номер патенту: 4345
Опубліковано: 27.12.1994
Автори: Тюшка Михайло Михайлович, Іванов Іван Васильович, Ситник Микола Петрович
МПК: B66F 1/00
Формула / Реферат:
Шаговый подъемник, содержащий опору со стойками и связанной с их верхними концами поддомкратной балкой, домкраты, один из которых размещен на указанной поддомкратной балке, имеющие упоры вертикальные грузоподъемные элементы, два из которых соединены в верхней части поперечиной, связанной с одним из домкратов, и грузонесущую каретку с механизмами фиксации одностороннего действия для соединения их подвижных органов с упорами вертикальных...
Пічний ролик

Номер патенту: 2587
Опубліковано: 26.12.1994
Автори: Руденко Олександр Олександрович, Легенченко Геннадій Степанович
МПК: F27D 3/02
Формула / Реферат:
Печной ролик, содержащий водоохлаждаемый вал с опорным кольцом, секционную жаростойкую бочку, узел соединения секций которой с валом выполнен в виде пазов на торце каждой секции и кулачков на валу, отличающийся тем, что, с целью повышения надежности ролика, между торцовыми поверхностями кулачков и примыкающих к ним секций бочки выполнен зазор, при этом узел соединения секции с валом экранирован бочкой соседней секции.
Кулачкова муфта переважно для коробки передач транспортних засобів

Номер патенту: 1670
Опубліковано: 25.10.1994
Автор: Чутчев Микола Григорович
МПК: F16D 23/02
Мітки: кулачкова, переважно, муфта, транспортних, коробки, передач, засобів
Формула / Реферат:
1. Кулачковая муфта преимущественно для коробки передач транспортных средств, содержащая неподвижную и подвижную по оси полумуфты в виде дисков с закрепленными на обращенных друг к другу поверхностях радиально расположенными кулачками и узел синхронизации оборотов, связанных с кулачками подвижной полумуфты, отличающаясятем, что, с целью повышения надежности включения, узел синхронизации оборотов выполнен в виде эластичных элементов,...
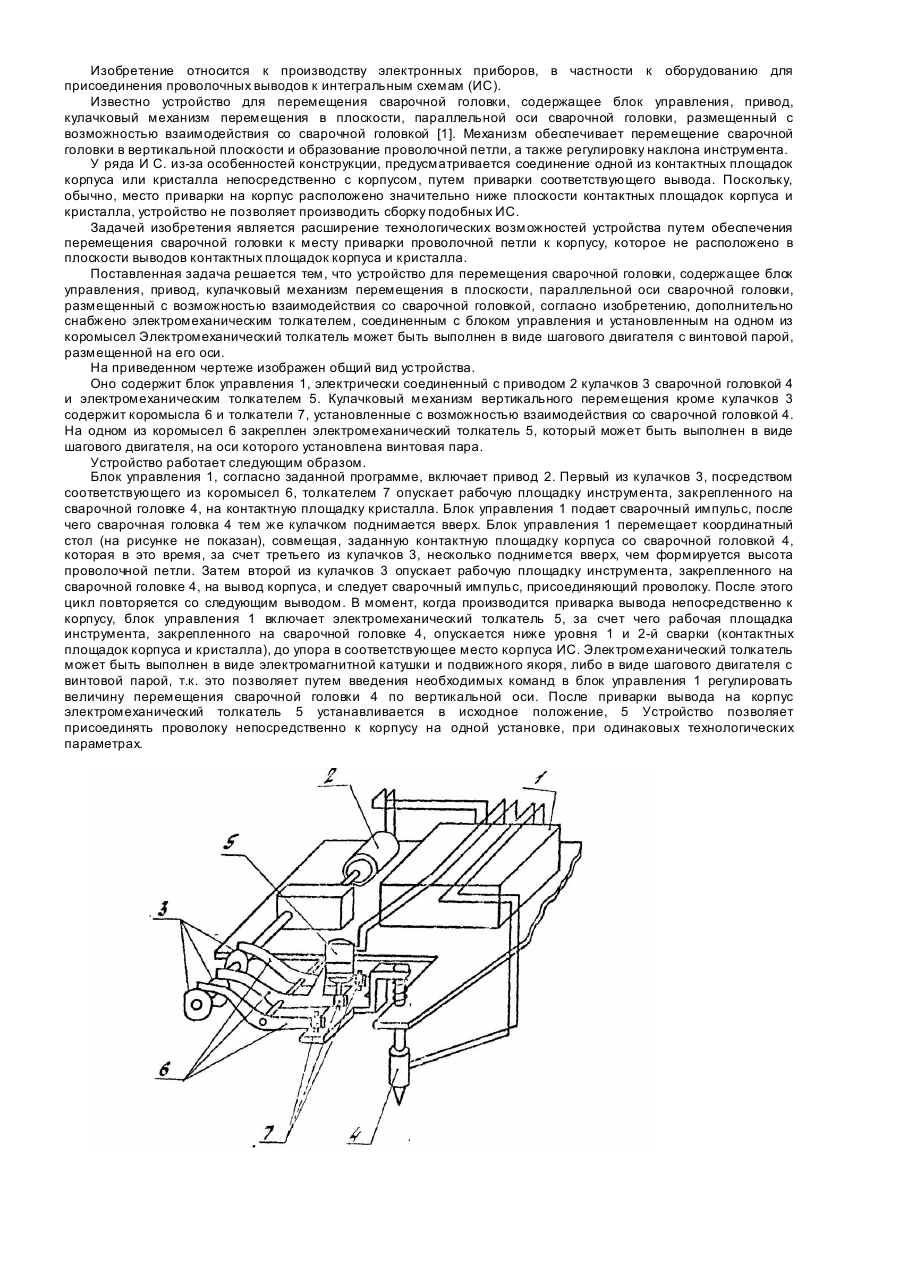
Пристрій для переміщення зварювальної головки
Номер патенту: 2640
Опубліковано: 26.12.1994
Автори: Куляк Михайло Васильович, Молчанов Костянтин Вікторович, Хомін Ігор Богданович
МПК: H01L 21/60
Мітки: переміщення, зварювальної, головки, пристрій
Формула / Реферат:
1. Устройство для перемещения сварочной головки, содержащее блок управления, привод, кулачковый механизм перемещения в плоскости, параллельной оси сварочной головки, размещенный с возможностью взаимодействия со сварочной головкой, отличающееся тем, что кулачковый механизм перемещения снабжен электромеханическим толкателем, соединенным с блоком управления и установленным на одном из коромысел.2. Устройство по п.1, отличающееся тем, что...
Попередній патент: Мастило для трансмісійних передач
Наступний патент: Штамм дріжджів saccharomyces cerevisiae, який використовується для виробництва хлібопекарських дріжджів
Випадковий патент: Пружно-кулачкова муфта