Асиметрична система автоматичного управління
Формула / Реферат
Асиметрична система автоматичного управління, котра містить центр управління і виконавчі пристрої, який відрізняється тим, що загальний центр управління розділений на центр управління прямими діями і комплементарний центр управління зворотними діями.
Текст
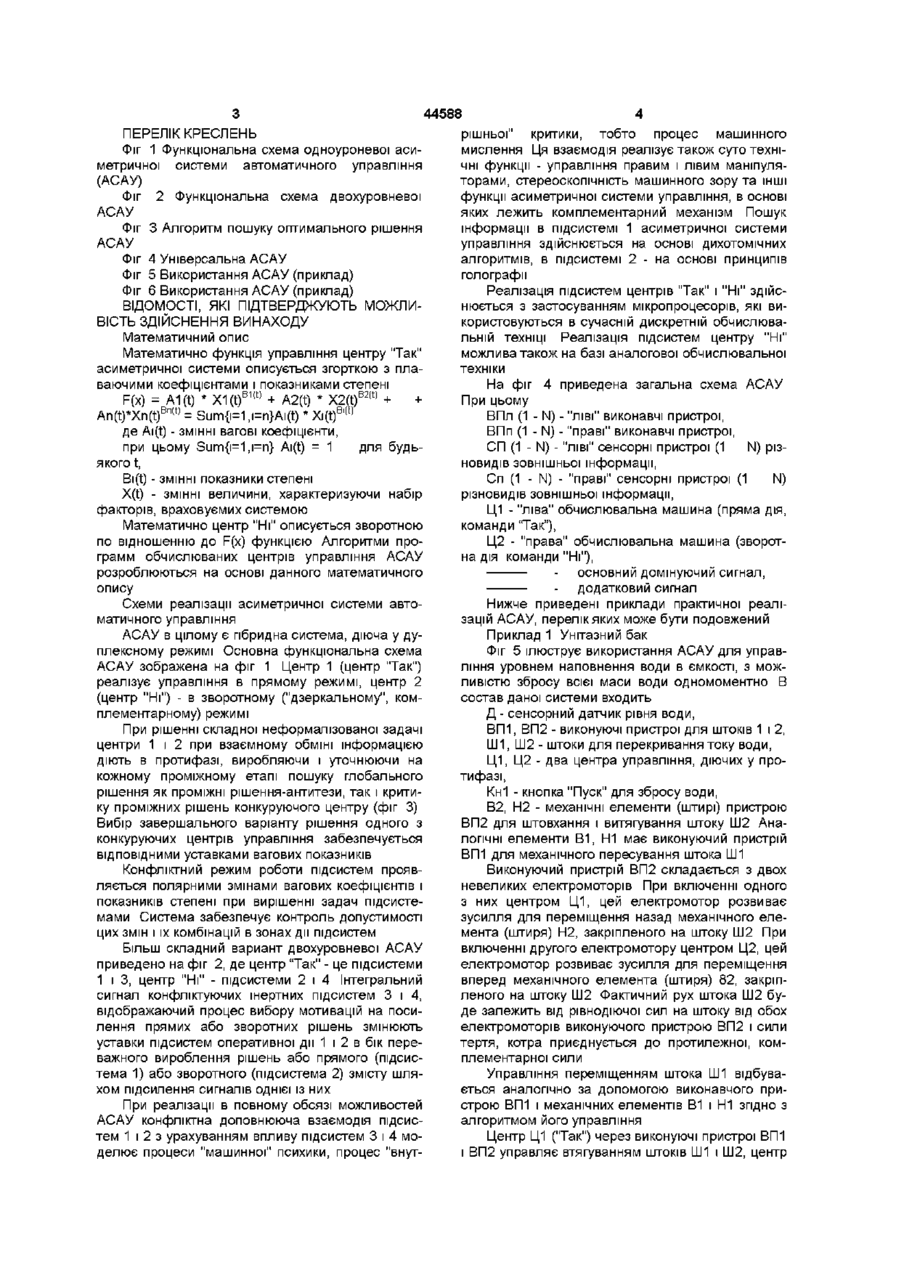
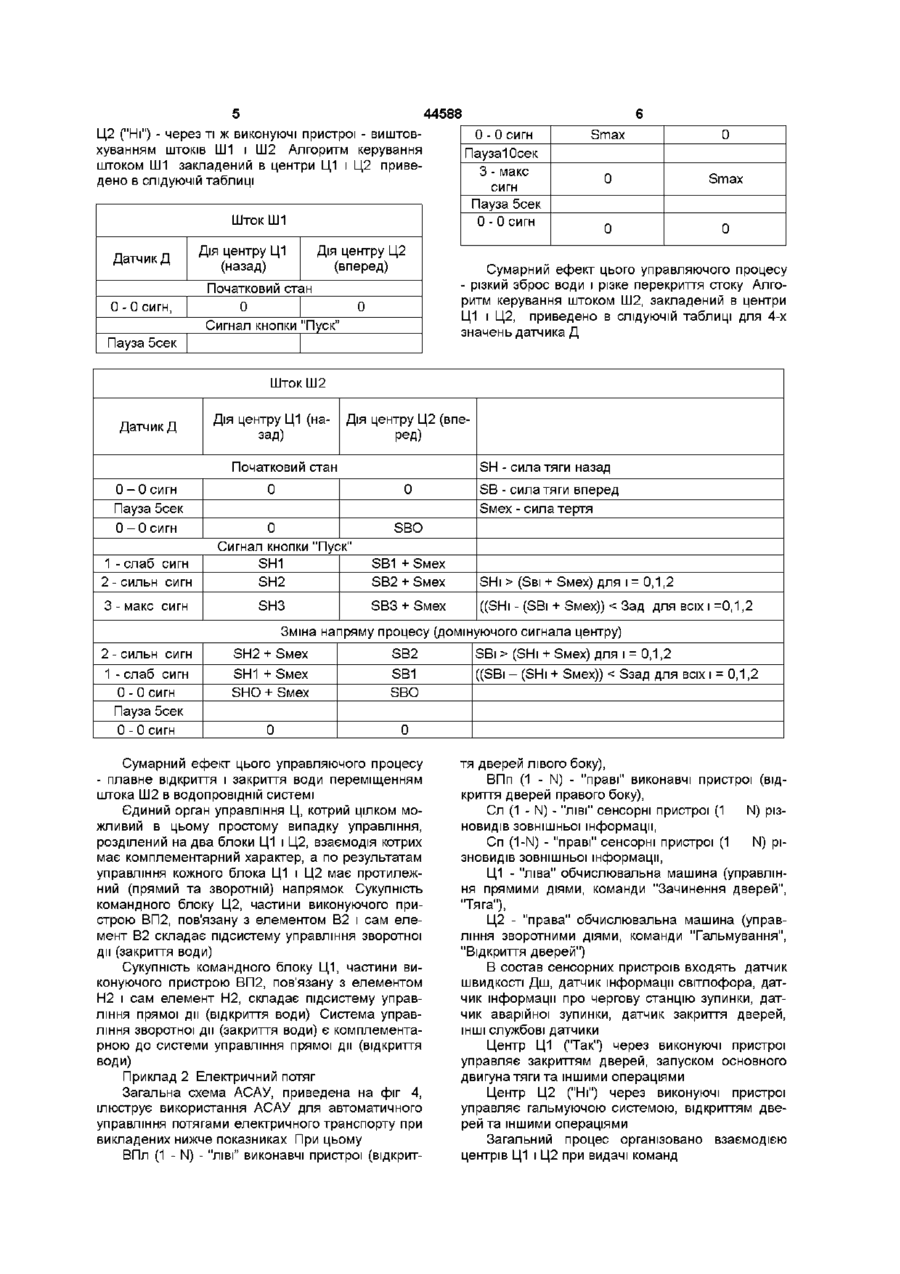
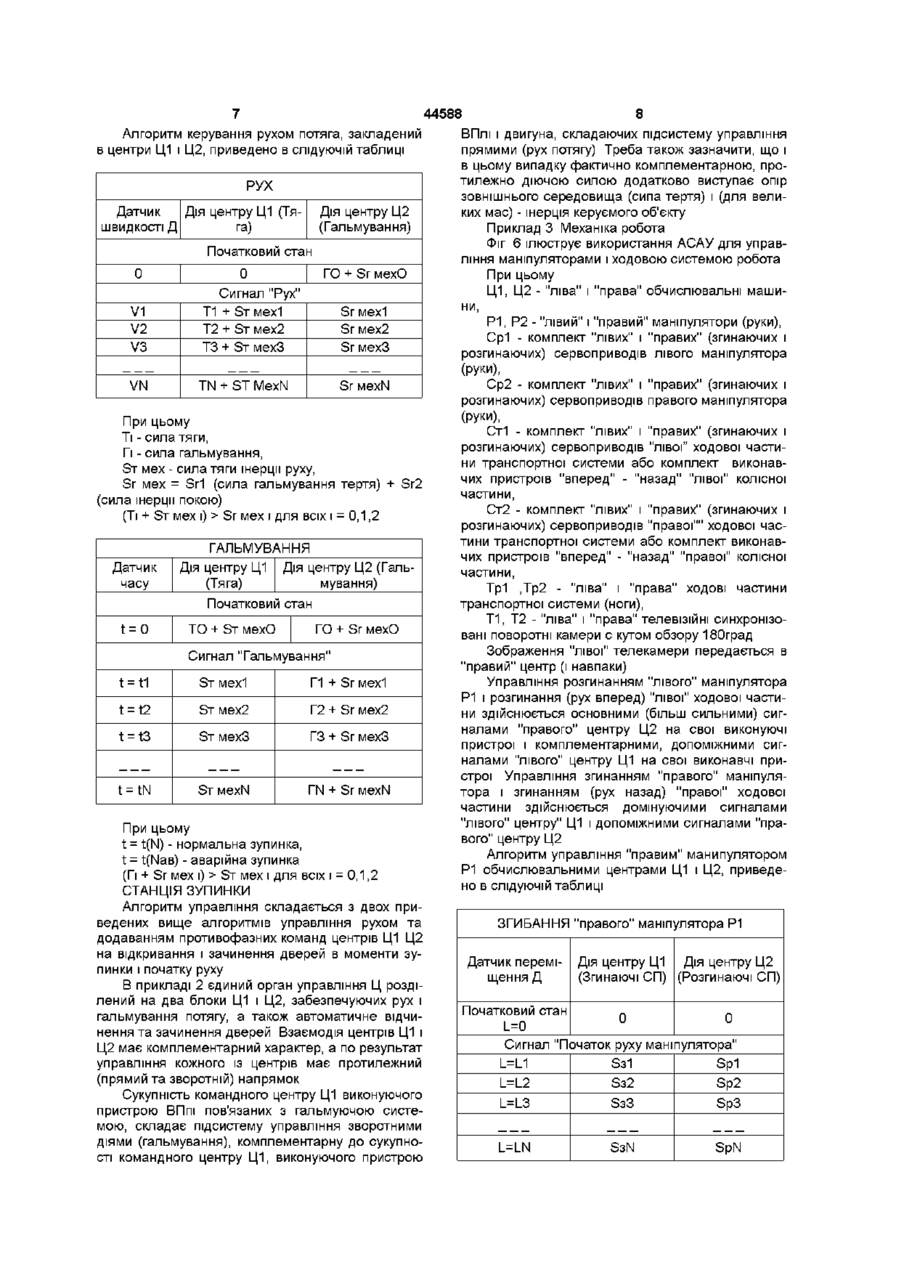
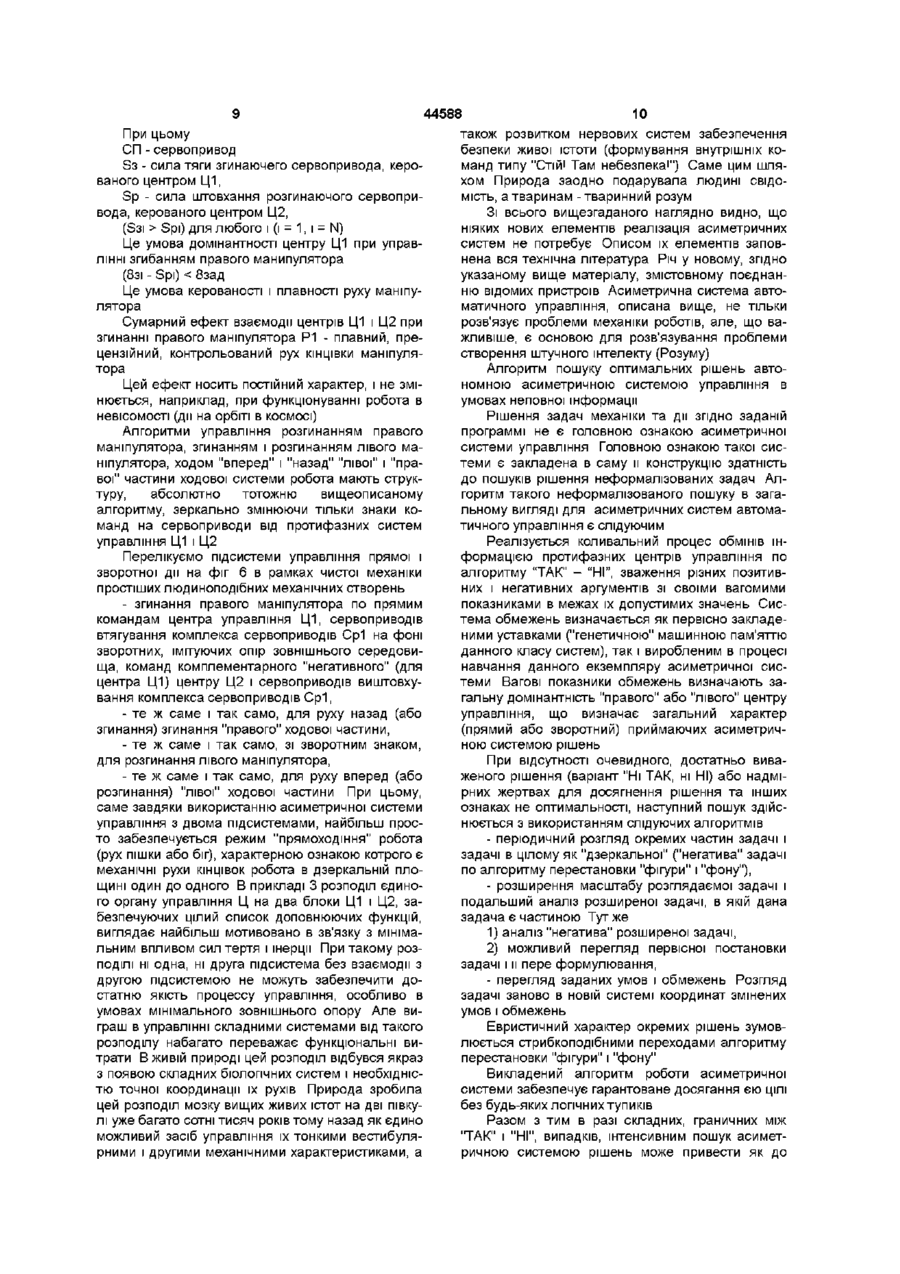
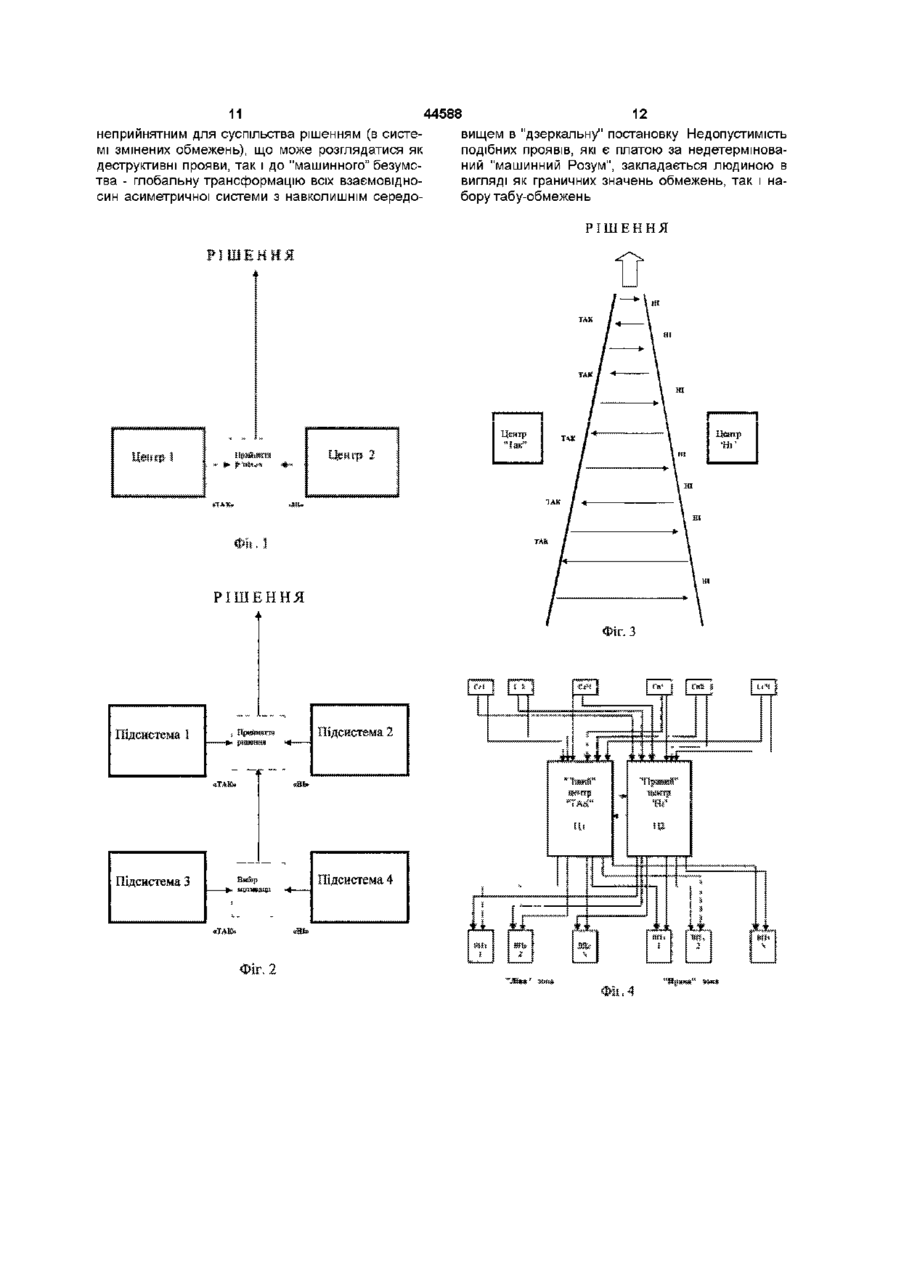
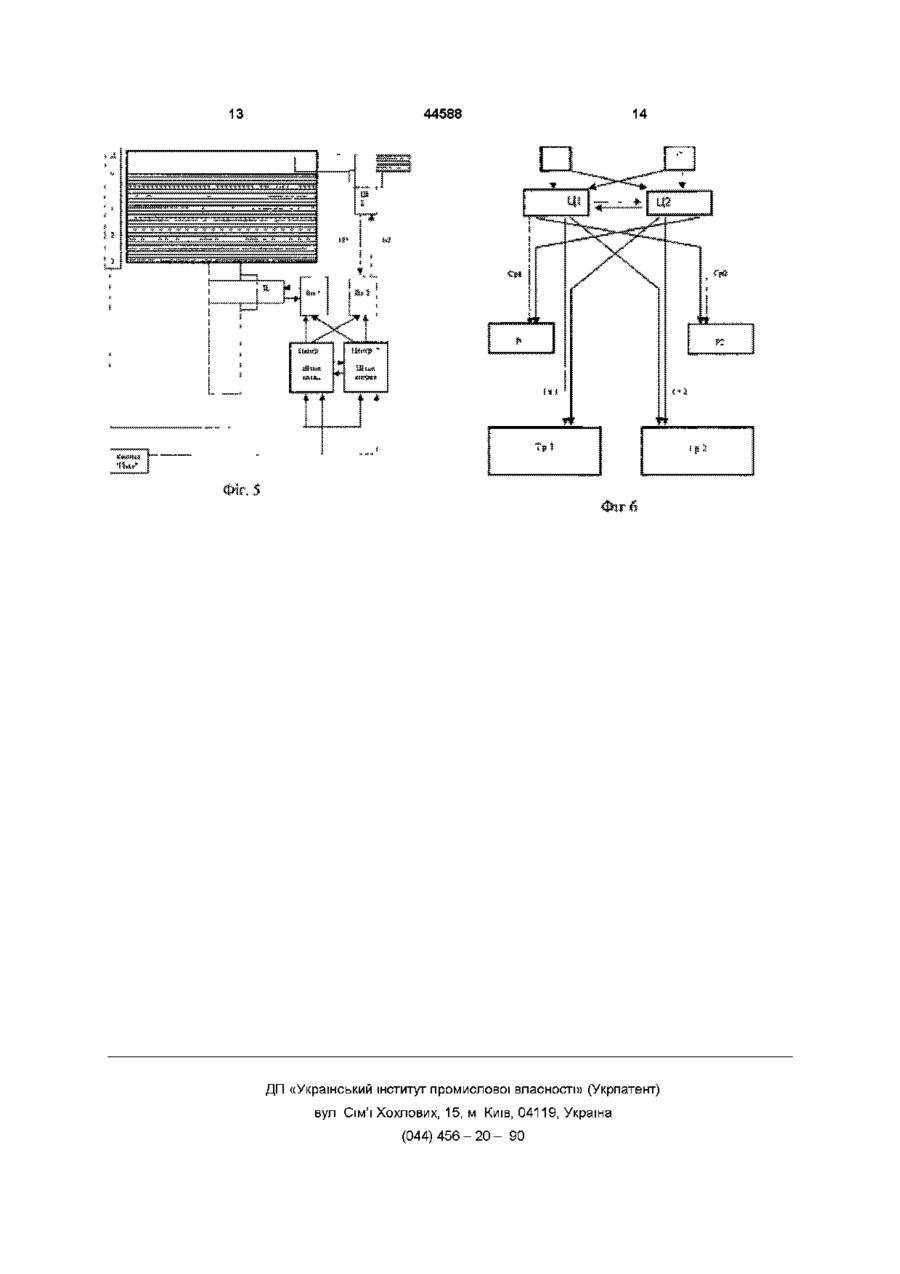
Асиметрична система автоматичного управління, котра містить центр управління і виконавчі пристрої, який відрізняється тим, що загальний центр управління розділений на центр управління прямими діями і комплементарний центр управління зворотними діями В роботах (ИНТЕГРАЛЬНЫЕ РОБОТЫ Сборник статей Вып 1 Пер с англ под ред Г Е Поздняка - М "Мир", 1973), (ИНТЕГРАЛЬНЫЕ РОБОТЫ Сборник статей Вып 2 Пер с англ под ред Г Е Поздняка - М "Мир" 1975) описана типова схема пристрою на основі двомашинного комплексу з розподілом функцій На цьому принципі побудована система "око - рука" робота Стенфордського університету (USA) аналогічний робіт Единбурзького університету Основною ідеєю, покладеною в основу такої структури, є ідея розподілу загальної схеми управління на "виконавчий" керуючий пристрій, працюючий в режимі реального часу і "законодавчий", вирішуючий задачі загального планування роботи робота Так, мала обчислювача машина керує "рукою" робота і виконує грубу обробку зображень, отриманих від "ока", тоді як велика обчислювача машина виконує загальне планування всієї роботи робота і детально обробляє усю зорову інформацію від малої машини Ця схема реалізується і в НОВІТНІХ системах «інтелектуальних» роботів жість описаних в приведених аналогах структур зі структурами мозку людини, ці моделі не дають змоги реалізувати ефективний процес пошуку оптимального рішення через відсутність власне механізму прийняття рішень в умовах неповної інформації, реалізованого в природі - у вищих тварин і, найліпше, у людини Інші класичні традиційні структури систем автоматичного управління (АНДРЮЩЕНКО В А Теория систем автоматического управления - Л изд Ленинградского университета, 1990) , робота яких побудована на основі повної формальної логіки, є ще більш детермінованими системами, повністю характеризуємими закладеними в них програмами і параметрами Ці недоліки не дозволяють затвердити вищезгадані структури управління як основу для побудови автономних систем автоматичного управління в умовах неповної інформації, систем штучного інтелекту та комп'ютерів наступних поколінь В основу винаходу поставлено задачу створення принципово нової схеми адаптивної системи автоматичного управління для автономної роботи в умовах неповної інформації шляхом розподілу загальносистемного центру управління на два функціонально асиметричні центри управління - центр "Так" ("лівий") І центр "Ні" ("правий"), в одному з яких інтегрується управління прямими діями системи, а в іншому - "дзеркальними" (комплементарними, симетричними з точністю до навпаки) діями Цим створюється механізм пошуку оптимального багатокритеріального рішення в умовах неповної інформації на основі реалізації алгоритмів "внутрішньої" критики, а також механізми реалізації інших комплементарних функцій системи В роботах (ИВАНОВ В В Чет и нечет Асимметрия мозга и знаковых систем - М "Советское радио", 1978), (ИВАНОВ В В Лингвистика и исследование афазии - В кн Структурнотипологические исследования - М "Наука", 1962) описана найбільш близька до пропонуємого винаходу схема двомашинного комплексу з двома манипуляторами ("руками") і двома пристроями для керування манипуляторами При цьому моделюються дві важливі функції півкуль мозку людини 1) дм в режимі реального часу (права півкуля) і планування стратегії поведінки (ліва півкуля), 2) різних форм подання і обробки інформації в машинах, моделюючих різні півкулі мозку В той же час, незважаючи на формальну схо 00 00 ю 44588 ПЕРЕЛІК КРЕСЛЕНЬ рішньої" критики, тобто процес машинного мислення Ця взаємодія реалізує також суто техніФіг 1 Функціональна схема одноуроневої асичні функції - управління правим і лівим маніпуляметричної системи автоматичного управління торами, стереоскопічність машинного зору та ІНШІ (АСАУ) функції асиметричної системи управління, в основі Фіг 2 Функціональна схема двохуровневої яких лежить комплементарний механізм Пошук АСАУ інформації в підсистемі 1 асиметричної системи Фіг 3 Алгоритм пошуку оптимального рішення управління здійснюється на основі дихотомічних АСАУ алгоритмів, в підсистемі 2 - на основі принципів Фіг 4 Універсальна АСАУ голографії Фіг 5 Використання АСАУ (приклад) Фіг 6 Використання АСАУ (приклад) Реалізація підсистем центрів "Так" і "Ні" здійсВІДОМОСТІ, ЯКІ ПІДТВЕРДЖУЮТЬ МОЖЛИнюється з застосуванням мікропроцесорів, які виВІСТЬ ЗДІЙСНЕННЯ ВИНАХОДУ користовуються в сучасній дискретній обчислювальній техніці Реалізація підсистем центру "Ні" Математичний опис можлива також на базі аналогової обчислювальної Математично функція управління центру "Так" техніки асиметричної системи описується згорткою з плаваючими коефіцієнтами і показниками степені На фіг 4 приведена загальна схема АСАУ B1(t| B2(t| B1(t| B2(t| При цьому A2(t) * X2(t) F(x) = A1(t) * X1(t) () () () BBl () (t| ВПл (1 - N) - "ЛІВІ" виконавчі пристрої, An(t)*Xn(t)BBn(t| = Sum{i=1 ,i=n}Ai(t) * Xi(t) ™ ™ ВПп (1 - N) - "праві" виконавчі пристрої, де Ai(t) - ЗМІННІ вагові коефіцієнти, СП (1 - N) - "ЛІВІ" сенсорні пристрої (1 N) різпри цьому Sum{i=1,i=n} Ai(t) = 1 для будьновидів зовнішньої інформації, якого t, Bi(t) - ЗМІННІ показники степені Сп (1 - N) - "праві" сенсорні пристрої (1 N) X(t) - ЗМІННІ величини, характеризуючи набір різновидів зовнішньої інформації, факторів, враховуємих системою Ц1 - "ліва" обчислювальна машина (пряма дія, команди "Так"), Математично центр "Ні" описується зворотною по відношенню до F(x) функцією Алгоритми проЦ2 - "права" обчислювальна машина (зворотграмм обчислюваних центрів управління АСАУ на дія команди "Ні"), розроблюються на основі данного математичного - основний домінуючий сигнал, опису - додатковий сигнал Схеми реалізації асиметричної системи автоНижче приведені приклади практичної реаліматичного управління зацій АСАУ, перелік яких може бути подовжений АСАУ в цілому є гібридна система, діюча у дуПриклад 1 Унітазний бак плексному режимі Основна функціональна схема Фіг 5 ілюструє використання АСАУ для управАСАУ зображена на фіг 1 Центр 1 (центр "Так") ління уровнем наповнення води в ємкості, з можреалізує управління в прямому режимі, центр 2 ливістю збросу всієї маси води одномоментно В (центр "Ні") - в зворотному ("дзеркальному", комсостав даної системи входить плементарному) режимі Д - сенсорний датчик рівня води, При рішенні складної неформалізованої задачі ВП1, ВП2 - виконуючі пристрої для штоків 1 і 2, центри 1 і 2 при взаємному обміні інформацією LU1, LU2 - штоки для перекривання току води, діють в протифазі, виробляючи і уточнюючи на Ц1, Ц2 - два центра управління, діючих у прокожному проміжному етапі пошуку глобального тифазі, рішення як проміжні рішення-антитези, так і критиКн1 - кнопка "Пуск" для збросу води, ку проміжних рішень конкуруючого центру (фіг 3) В2, Н2 - механічні елементи (штирі) пристрою Вибір завершального варіанту рішення одного з ВП2 для штовхання і витягування штоку LU2 Анаконкуруючих центрів управління забезпечується логічні елементи В1, Н1 має виконуючий пристрій ВІДПОВІДНИМИ уставками вагових показників ВП1 для механічного пересування штока LU1 Конфліктний режим роботи підсистем проявВиконуючий пристрій ВП2 складається з двох ляється полярними змінами вагових коефіцієнтів і невеликих електромоторів При включенні одного показників степені при вирішенні задач підсистез них центром Ц1, цей електромотор розвиває мами Система забезпечує контроль допустимості зусилля для переміщення назад механічного елецих змін і їх комбінацій в зонах дії підсистем мента (штиря) Н2, закріпленого на штоку LU2 При включенні другого електромотору центром Ц2, цей Більш складний вариант двохуровневої АСАУ електромотор розвиває зусилля для переміщення приведено на фіг 2, де центр "Так" - це підсистеми вперед механічного елемента (штиря) 82, закріп1 і 3, центр "Ні" - підсистеми 2 і 4 Інтегральний леного на штоку LU2 Фактичний рух штока LU2 бусигнал конфліктуючих інертних підсистем 3 і 4, де залежить від рівнодіючої сил на штоку від обох відображаючий процес вибору мотивацій на посиелектромоторів виконуючого пристрою ВП2 і сили лення прямих або зворотних рішень змінюють тертя, котра приєднується до протилежної, комуставки підсистем оперативної дії 1 і 2 в бік переплементарної сили важного вироблення рішень або прямого (підсистема 1) або зворотного (підсистема 2) змісту шляУправління переміщенням штока LU1 відбувахом підсилення сигналів однієї із них ється аналогічно за допомогою виконавчого пристрою ВП1 і механічних елементів В1 і Н1 згідно з При реалізації в повному обсязі можливостей алгоритмом його управління АСАУ конфліктна доповнююча взаємодія підсистем 1 і 2 з урахуванням впливу підсистем 3 і 4 моЦентр Ц1 ("Так") через виконуючі пристрої ВП1 делює процеси "машинної" психики, процес "внуті ВП2 управляє втягуванням штоків LU1 і LU2, центр 44588 Ц2 ("Hi") - через ті ж виконуючі пристрої - виштовхуванням штоків LU1 і LU2 Алгоритм керування штоком LU1 закладений в центри Ц1 і Ц2 приведено в слідуючій таблиці ШтокШІ Датчик Д 0 - 0 сигн, Дія центру Ц1 (назад) Дія центру Ц2 (вперед) Початковий стан 0 Сигнал кнопки "Пуск" 0 Пауза 5сек 0 - 0 сигн ПаузаЮсек 3 - макс сигн Пауза 5сек 0 - 0 сигн Smax 0 0 Smax 0 0 Сумарний ефект цього управляючого процесу - різкий зброс води і різке перекриття стоку Алгоритм керування штоком LU2, закладений в центри Ц1 і Ц2, приведено в слідуючій таблиці для 4-х значень датчика Д Шток Ш2 Датчик Д Дія центру Ц1 (назад) Дія центру Ц2 (впеРЄД) Початковий стан 0 - 0 сигн Пауза 5сек 0 - 0 сигн 1 - слаб сигн 2 - сильн сигн 0 SH - сила тяги назад 0 0 Сигнал кнопки "Пуск" SH1 SH2 SB - сила тяги вперед Бмех - сила тертя SBO SB1 + Бмех SB2 + Бмех SHi > (SBI + Бмех) для і = 0,1,2 SB3 + Бмех ((SHi - (SBi + Бмех)) (SHi + Эмех) для і = 0,1,2 ((SBi - (SHi + Эмех)) Sr мех і для всіх і = 0,1,2 розгинаючих) сервоприводів "правої"" ходової частини транспортної системи або комплект виконавГАЛЬМУВАННЯ чих пристроїв "вперед" - "назад" "правої" колісної Датчик Дія центру Ц1 Дія центру Ц2 (Гальчастини, часу (Тяга) мування) Тр1 ,Тр2 - "ліва" і "права" ходові частини транспортної системи (ноги), Початковий стан Т1, Т2 - "ліва" і "права" телевізійні синхронізоТО + ST мехО ГО + Sr мехО t=0 вані поворотні камери с кутом обзору 180град Зображення "лівої" телекамери передається в Сигнал "Гальмування" "правий" центр (і навпаки) Управління розгинанням "лівого" маніпулятора ST мех1 П + Sr мех1 t = t1 Р1 і розгинання (рух вперед) "лівої" ходової частиST мех2 Г2 + Sr мех2 t = t2 ни здійснюється основними (більш сильними) сигналами "правого" центру Ц2 на свої виконуючі ST мехЗ ГЗ + Sr мехЗ t = t3 пристрої і комплементарними, допоміжними сигналами "лівого" центру Ц1 на свої виконавчі пристрої Управління згинанням "правого" маніпулятора і згинанням (рух назад) "правої" ходової ST MexN TN + Sr MexN t = tN частини здійснюється домінуючими сигналами "лівого" центру" Ц1 і допоміжними сигналами "праПри цьому вого" центру Ц2 t = t(N) - нормальна зупинка, Алгоритм управління "правим" манипулятором t = t(Nae) - аварійна зупинка Р1 обчислювальними центрами Ц1 і Ц2, приведе(Гі + Sr мех і) > ST мех і для всіх і = 0,1,2 но в слідуючій таблиці СТАНЦІЯ ЗУПИНКИ Алгоритм керування рухом потяга, закладений в центри Ц1 і Ц2, приведено в слідуючій таблиці Алгоритм управління складається з двох приведених вище алгоритмів управління рухом та додаванням противофазних команд центрів Ц1 Ц2 на відкривання і зачинення дверей в моменти зупинки і початку руху В прикладі 2 єдиний орган управління Ц розділений на два блоки Ц1 і Ц2, забезпечуючих рух і гальмування потягу, а також автоматичне відчинення та зачинення дверей Взаємодія центрів Ц1 і Ц2 має комплементарний характер, а по результат управління кожного із центрів має протилежний (прямий та зворотній) напрямок Сукупність командного центру Ц1 виконуючого пристрою ВПпі пов'язаних з гальмуючою системою, складає підсистему управління зворотними діями (гальмування), комплементарну до сукупності командного центру Ц1, виконуючого пристрою ЗГИБАННЯ "правого" маніпулятора Р1 Датчик переміщення Д Дія центру Ц1 Дія центру Ц2 (Згинаючі СП) (Розгинаючі СП) Початковий стан 0 0 І_=0 Сигнал "Початок руху маніпулятора" І_=І_1 S31 Sp1 І_=І_2 Ss2 Sp2 І_=І_3 ЭзЗ Sp3 L=LN SsN SpN При цьому СП - сервопривод S3 - сила тяги згинаючего сервопривода, керованого центром Ц1, Sp - сила штовхання розгинаючого сервопривода, керованого центром Ц2, (S31 > Spi) для любого і (і = 1, і = N) Це умова домінантності центру Ц1 при управлінні згибанням правого манипулятора (8зі - Spi) < 8зад Це умова керованості і плавності руху маніпулятора Сумарний ефект взаємодії центрів Ц1 і Ц2 при згинанні правого маніпулятора Р1 - плавний, прецензійний, контрольований рух КІНЦІВКИ маніпулятора Цей ефект носить постійний характер, і не змінюється, наприклад, при функціонуванні робота в невісомості (дії на орбіті в космосі) Алгоритми управління розгинанням правого маніпулятора, згинанням і розгинанням лівого маніпулятора, ходом "вперед" і "назад" "лівої" і "правої" частини ходової системи робота мають структуру, абсолютно тотожню вищеописаному алгоритму, зеркально змінюючи тільки знаки команд на сервоприводи від протифазних систем управління Ц1 і Ц2 Перелікуємо підсистеми управління прямої і зворотної дії на фіг 6 в рамках чистої механіки простіших людиноподібних механічних створень - згинання правого маніпулятора по прямим командам центра управління Ц1, сервоприводів втягування комплекса сервоприводів Ср1 на фоні зворотних, імітуючих опір зовнішнього середовища, команд комплементарного "негативного" (для центра Ц1) центру Ц2 і сервоприводів виштовхування комплекса сервоприводів Ср1, - те ж саме і так само, для руху назад (або згинання) згинання "правого" ходової частини, - те ж саме і так само, зі зворотним знаком, для розгинання лівого маніпулятора, - те ж саме і так само, для руху вперед (або розгинання) "лівої" ходової частини При цьому, саме завдяки використанню асиметричної системи управління з двома підсистемами, найбільш просто забезпечується режим "прямоходшня" робота (рух пішки або біг), характерною ознакою котрого є механічні рухи КІНЦІВОК робота в дзеркальній площині один до одного В прикладі 3 розподіл єдиного органу управління Ц на два блоки Ц1 і Ц2, забезпечуючих цілий список доповнюючих функцій, виглядає найбільш мотивовано в зв'язку з мінімальним впливом сил тертя і інерції При такому розподілі ні одна, ні друга підсистема без взаємодії з другою підсистемою не можуть забезпечити достатню якість процессу управління, особливо в умовах мінімального зовнішнього опору Але виграш в управлінні складними системами від такого розподілу набагато переважає функціональні витрати В живій природі цей розподіл відбувся якраз з появою складних біологічних систем і необхідністю точної координації їх рухів Природа зробила цей розподіл мозку вищих живих істот на дві півкулі уже багато сотні тисяч років тому назад як єдино можливий засіб управління їх тонкими вестибулярними і другими механічними характеристиками, а 44588 10 також розвитком нервових систем забезпечення безпеки живої істоти (формування внутрішніх команд типу "СТІЙІ Там небезпекаї") Саме цим шляхом Природа заодно подарувала людині СВІДОМІСТЬ, а тваринам -тваринний розум Зі ВСЬОГО вищезгаданого наглядно видно, що ніяких нових елементів реалізація асиметричних систем не потребує Описом їх елементів заповнена вся технічна література Річ у новому, згідно указаному вище матеріалу, змістовному поєднанню відомих пристроїв Асиметрична система автоматичного управління, описана вище, не тільки розв'язує проблеми механіки роботів, але, що важливіше, є основою для розв'язування проблеми створення штучного інтелекту (Розуму) Алгоритм пошуку оптимальних рішень автономною асиметричною системою управління в умовах неповної інформації Рішення задач механіки та дії згідно заданій программі не є головною ознакою асиметричної системи управління Головною ознакою такої системи є закладена в саму м конструкцію здатність до пошуків рішення неформалізованих задач Алгоритм такого неформалізованого пошуку в загальному вигляді для асиметричних систем автоматичного управління є слідуючим Реалізується коливальний процес обмінів інформацією протифазних центрів управління по алгоритму "ТАК" - "НІ", зваження різних позитивних і негативних аргументів зі своїми вагомими показниками в межах їх допустимих значень Система обмежень визначається як первісно закладеними уставками ("генетичною" машинною пам'яттю данного класу систем), так і виробленим в процесі навчання данного екземпляру асиметричної системи Вагові показники обмежень визначають загальну домшантність "правого" або "лівого" центру управління, що визначає загальний характер (прямий або зворотний) приймаючих асиметричною системою рішень При відсутності очевидного, достатньо виваженого рішення (варіант "Ні ТАК, ні НІ) або надмірних жертвах для досягнення рішення та інших ознаках не оптимальності, наступний пошук здійснюється з використанням слідуючих алгоритмів - періодичний розгляд окремих частин задачі і задачі в цілому як "дзеркальної" ("негатива" задачі по алгоритму перестановки "фігури" і "фону"), - розширення масштабу розглядаємої задачі і подальший аналіз розширеної задачі, в якій дана задача є частиною Тут же 1) аналіз "негатива" розширеної задачі, 2) можливий перегляд первісної постановки задачі і м пере формулювання, - перегляд заданих умов і обмежень Розгляд задачі заново в новій системі координат змінених умов і обмежень Евристичний характер окремих рішень зумовлюється стрибкоподібними переходами алгоритму перестановки "фігури" і "фону" Викладений алгоритм роботи асиметричної системи забезпечує гарантоване досягання єю ЦІЛІ без будь-яких логічних тупиків Разом з тим в разі складних, граничних між "ТАК" і "НІ", випадків, інтенсивним пошук асиметричною системою рішень може привести як до 11 44588 12 неприйнятним для суспільства рішенням (в систевищем в "дзеркальну" постановку Недопустимість мі змінених обмежень), що може розглядатися як подібних проявів, які є платою за недетерміновадеструктивні прояви, так і до "машинного" безумсний "машинний Розум", закладається людиною в тва - глобальну трансформацію всіх взаємовідновигляді як граничних значень обмежень, так і насин асиметричної системи з навколишнім середобору табу-обмежень РІШЕННЯ РІШЕННЯ Фіг. З Підсистема І Підсистема З Фіг. 2 13 44588 14 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G05B 13/00
Мітки: асиметрична, автоматичного, система, управління
Код посилання
<a href="https://ua.patents.su/7-44588-asimetrichna-sistema-avtomatichnogo-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Асиметрична система автоматичного управління</a>
Система автоматичного управління
Номер патенту: 29261
Опубліковано: 16.10.2000
Автор: Самедов Юсіф Фахрат огли
МПК: G05B 11/42
Мітки: управління, система, автоматичного
Формула / Реферат:
Система автоматичного управління, яка містить елемент порівняння, перший вхід якого є входом системи, а другий вхід є з'єднаний з виходом об'єкта управління, вхід якого підключений до виходу суматору, два підсилювача, де вихід першого підсилювача з'єднаний з першим входом суматора, інтегратор, диференціатор, до виходу якого першим входом підключений підсумуючий підсилювач, а його другий вхід зв'язаний з виходом елемента порівняння і входом...
Спосіб та система автоматичного управління горінням в печі
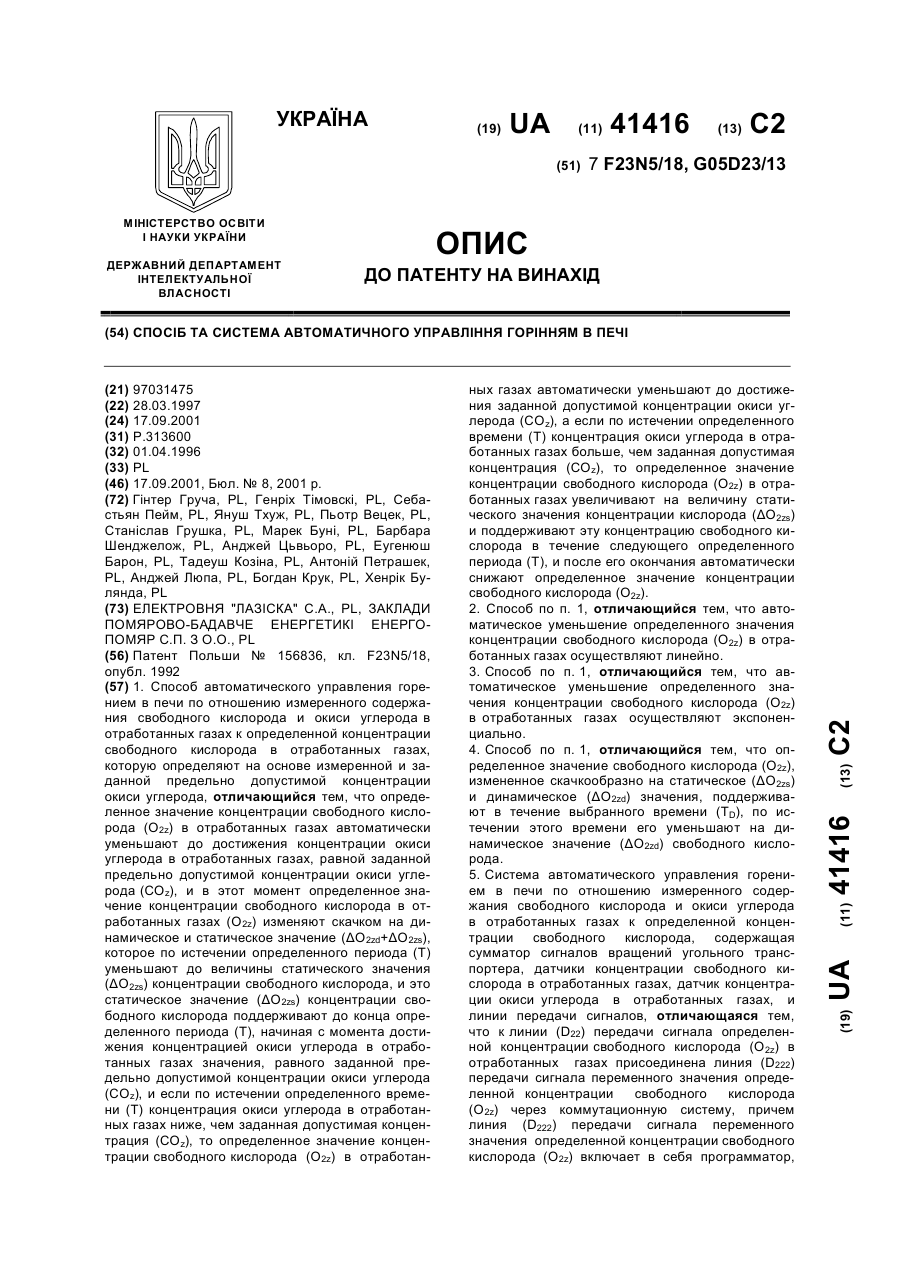
Номер патенту: 41416
Опубліковано: 17.09.2001
Автори: Богдан Крук, Януш Тхуж, Пьотр Вецек, Хенрік Булянда, Тадеуш Козіна, Анджей Цьвьоро, Антоній Петрашек, Станіслав Грушка, Себастьян Пейм, Анджей Люпа, Марек Буні, Еугенюш Барон, Генріх Тімовскі, Гінтер Груча, Барбара Шенджелож
МПК: F23N 5/18, G05D 23/01
Мітки: горінням, управління, спосіб, система, автоматичного, печі
Формула / Реферат:
1. Способ автоматического управления горением в печи по отношению измеренного содержания свободного кислорода и окиси углерода в отработанных газах к определенной концентрации свободного кислорода в отработанных газах, которую определяют на основе измеренной и заданной предельно допустимой концентрации окиси углерода, отличающийся тем, что определенное значение концентрации свободного кислорода (О2z) в отработанных газах автоматически...
Система автоматичного управління відбором пічного газу
Номер патенту: 4449
Опубліковано: 27.12.1994
Автори: Павленко Микола Михайлович, Фільшин Віталій Євгенович, Кухтєнков Констянтин Михайлович, Леонт'єв Олексій Матвійович
МПК: F27D 19/00
Мітки: відбором, газу, система, пічного, управління, автоматичного
Формула / Реферат:
Система автоматического управления отбором печного гдза из известковоожигательных печей в производстве кальцинированной соды, содержащая в каждой печи датчик давления, регулятор сброса газа в атмосферу, регулятор давления печи, исполнительный механизм регулирующего органа сброса в атмосферу и исполнительный механизм регулирующего органа отбора газа из печи, причем в каждой печи датчик давления соединен с первым входом регулятора сброса газа...
Система автоматичного управління водовідливною установкою
Номер патенту: 18629
Опубліковано: 25.12.1997
Автори: Трущенков Валерій Олексійович, Маргуліс Ісаак Соломонович, Захарюгін Олександр Дмитрович, Матвієнко Микола Павлович, Солодовнік Анатолій Іванович
МПК: F04B 49/00, G05B 11/01
Мітки: система, автоматичного, управління, водовідливною, установкою
Формула / Реферат:
Система автоматического управления водоотливной установкой, содержащая датчики нижнего, верхнего и аварийного уровней, датчики давления, датчики производительности, датчики температуры подшипников, датчики включения высоковольтной ячейки двигателя, датчики закрытия задвижки, датчики заклинивания привода задвижки, приводы задвижек, приводы главных насосов, два блока управления насосами, привод заливочного насоса, блок звуковой сигнализации,...
Система автоматичного управління процесом синтезу аміаку
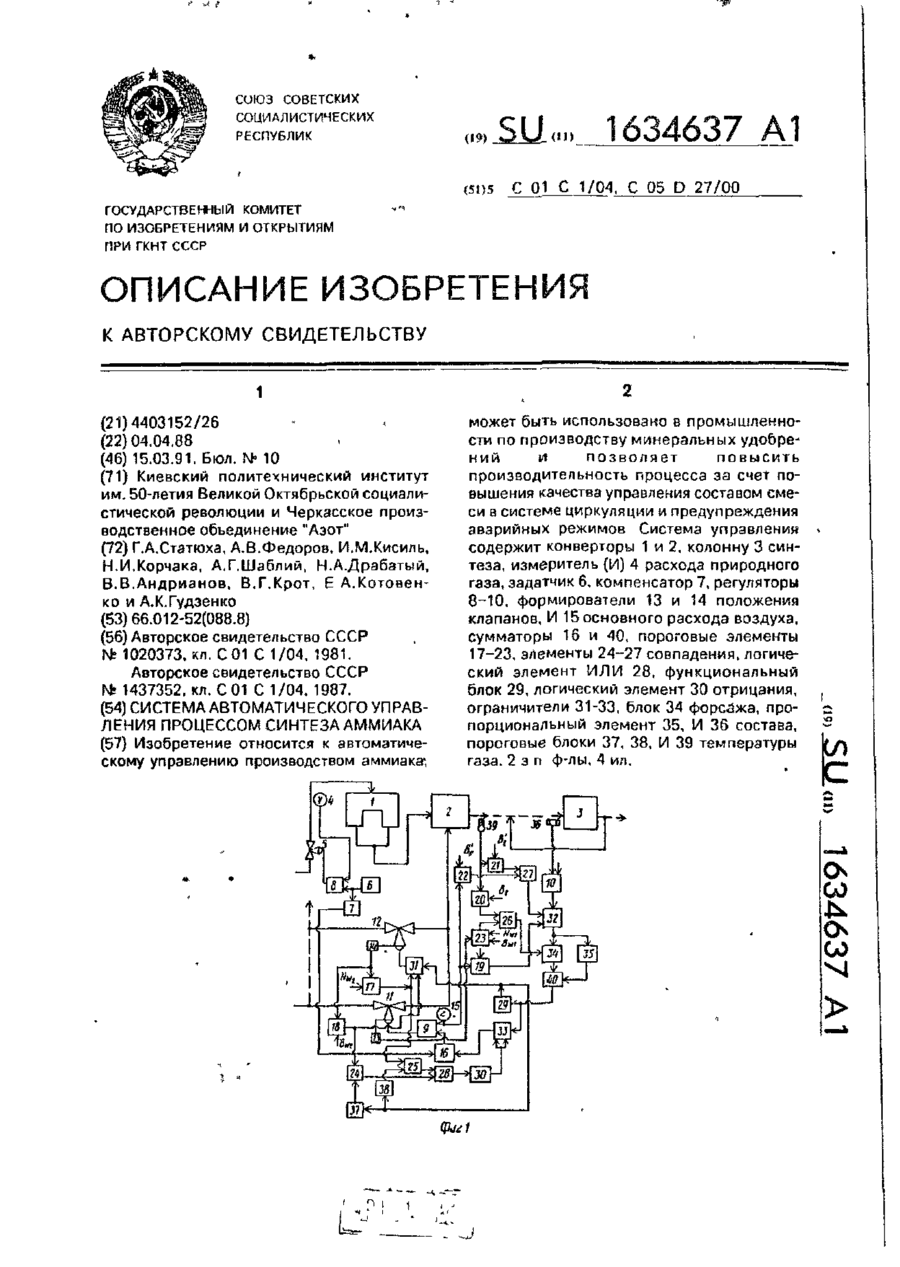
Номер патенту: 9408
Опубліковано: 30.09.1996
Автори: Котовенко Олена Андріївна, Андріанов Віктор Васильйович, Крот Віктор Григорович, Гудзенко Андрій Константинович, Кісіль Іван Максімовіч, Шаблій Олександр Григорович, Драбатий Микола Олександрович, Федоров Олександр Володимирович, Статюха Генадій Олексійович, Корчака Микола Іванович
МПК: C01C 1/04, G05D 16/00, G05D 27/00
Мітки: система, аміаку, автоматичного, процесом, управління, синтезу
Формула / Реферат:
1. Система автоматического управления процессом синтеза аммиака, содержащая измеритель расхода природного газа, подключенный к первому входу первого регулятора, выход которого связан с клапаном подачи газа, задатчик, выход которого соединен с вторым входом первого регулятора, формирователь положения второго клапана, параллельно подключенный к входам первого и второго пороговых элементов, выходы которых соединены с первыми входами...
Попередній патент: Спосіб виготовлення ікри червоної (імітованої), вітамінізованої протирадіаційної, протипухлинної
Наступний патент: Спосіб одержання електрокорунду
Випадковий патент: Спосіб індивідуальних занять оздоровчою ходьбою