Наземна автоматизована система контролю
Номер патенту: 46511
Опубліковано: 25.12.2009
Автори: Кочуров Володимир Леонідович, Кротько Дмитро Володимирович, Кротько Володимир Євгенійович, Зубик Валерій Леонідович
Формула / Реферат
Наземна автоматизована система контролю, яка складається з бортової та наземної частин, що з'єднані шлангами та кабелями, при цьому наземна частина містить програмний вимірювальний пристрій, блоки обробки сигналів, джерело електричної напруги, друкувальний пристрій, переговорний пристрій з літаком, пульт керування, причому входи програмного вимірювального пристрою з'єднані з виходами блоків обробки сигналів, джерела електричної напруги та пульта керування, а бортова частина містить панель керування, виходи якої з'єднані з входами датчиків аналогових, бінарних, частотних сигналів та разових сигналів-команд, виходи яких виведені на бортові рознімання, які поєднані з входами блоків обробки сигналів, яка відрізняється тим, що як блоки обробки сигналів використаний блок перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналів-команд, вхід якого поєднаний з виходами бортових рознімань, входи яких поєднані з виходами до 61 датчика аналогових, бінарних, частотних сигналів та разових сигналів-команд, при цьому як програмний вимірювальний пристрій використаний персональний комп'ютер.
Текст
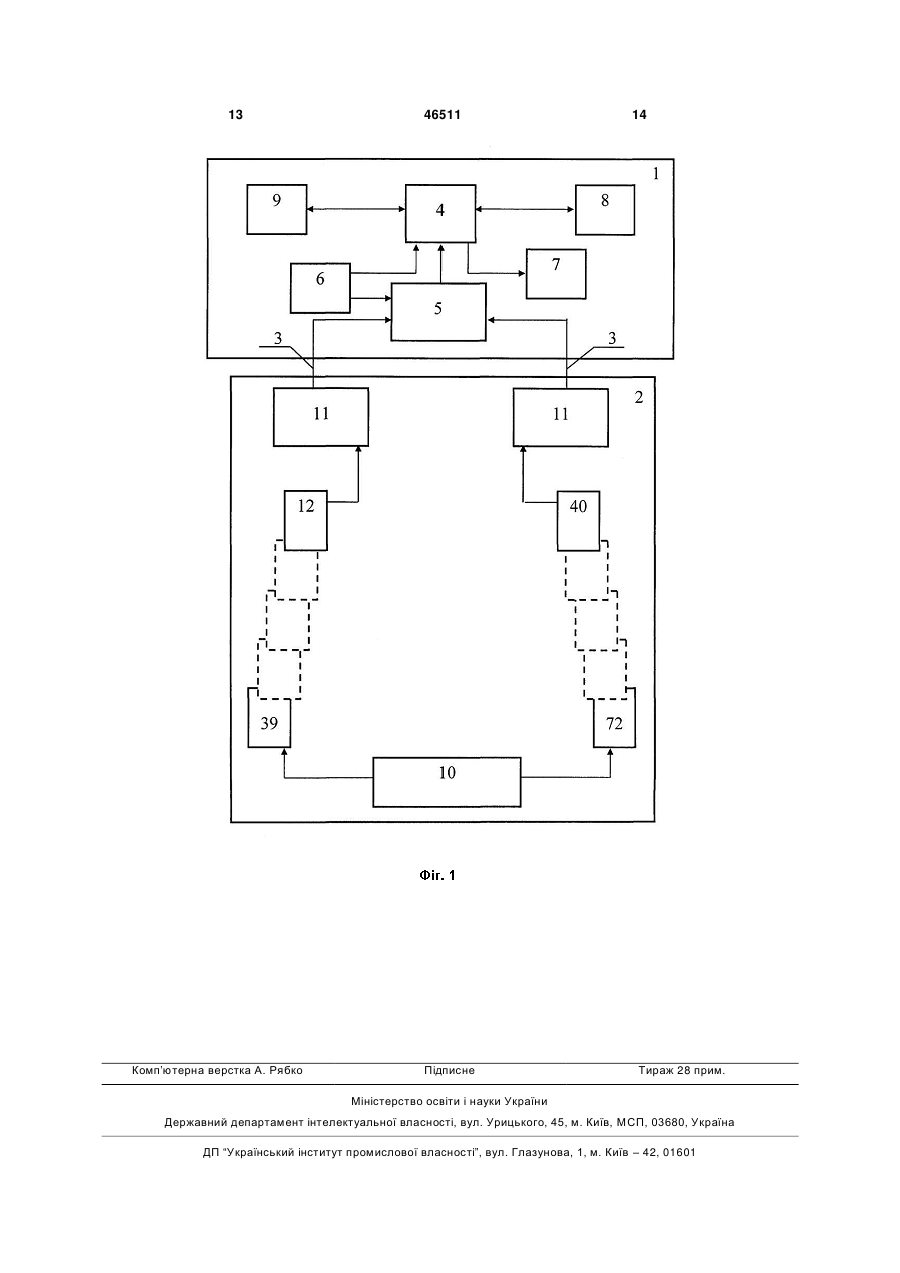
Наземна автоматизована система контролю, яка складається з бортової та наземної частин, що з'єднані шлангами та кабелями, при цьому наземна частина містить програмний вимірювальний пристрій, блоки обробки сигналів, джерело електричної напруги, друкувальний пристрій, переговорний пристрій з літаком, пульт керування, причому 3 кількісно оцінювати вимірювані параметри й виявляти несправні блоки. Наземна автоматизована система контролю (HACK) літальних апаратів - складний пристрій, здатний визначати будь-які технічні стани авіаційного обладнання ЛА на основі виміру та обробки значень тисяч параметрів різної фізичної природи. HACK мають високу універсальність і можуть перенастроюватися з контролю одного виду авіаційного обладнання на іншій програмними процесами. Широке використання апаратури, що реєструє, дозволяє їм накопичувати статистичні дані в процесі експлуатації, на базі яких ведеться ефективне прогнозування надійності й технічного стану авіаційного обладнання ЛА. HACK (Синдеев, 153) послідовно вирішує завдання збору, передачі, обробки та аналізу інформації про об'єкт контролю. При цьому більшість операцій здійснюється без участі операторів. HACK має високу вірогідність контролю та простоту обслуговування, скорочує часові витрати при діагностуванні й прогнозуванні стану ЛА. Відомий пристрій для перевірки систем регулювання тиску повітря в гермокабінах літальних апаратів (Авторское свидетельство СССР №1781974, МПК6 B64D13/04, опубл. 27.03.1995, бюл. №9), яка містить імітатор барометричного тиску на висоті польоту та імітатор тиску повітря в гермокабіні, що включає ємність зі штуцером для підключення до вимірювальних перетворювачів тиску повітря в системі, що перевіряється, а також операційний підсилювач з розніманням для підключення до каналу керування електропневмоперетворювачем системи, що перевіряється. Імітатор тиску повітря в гермокабіні прироблений електронагрівником повітря в ємності, граничним пристроєм, підключеним до виходу операційного підсилювача, і транзистором, вхід якого підключений до виходу граничного пристрою, а вихід включений у ланцюг живлення електронагрівника, причому імітатор барометричного тиску на висоті польоту постачений штуцером для підключення до каналу скидання електропневмоперетворювача системи, що перевіряється. Ємність імітатора тиску в гермокабіні прироблена регульованим сильфоном. Відомий пристрій для перевірки систем регулювання тиску повітря дозволяє підвищити вірогідність результатів, однак він не може бути використаний для прогнозування відмов елементів об'єкта. До того ж зазначений пристрій характеризується недостатньо високою точністю, відсутністю автоматичної обробки даних, малою кількістю параметрів, що реєструються. Також відомий пристрій для діагностування взаємозв'язаних елементів об'єкта і датчиків, (Деклараційний патент України на винахід №47903 А, МПК6 G01B23/02, опубл. 15.07.2002, бюл. №7, 2002p.), що містить групу датчиків, дешифратор, який має чотири секції, десять елементів АБО, перемикач режимів роботи пристрою, три блоки індикаторів, причому виходи датчиків підключені до входів дешифратора, входи першого блока індикаторів з'єднані з виходами першої секції дешифратора, входи другого блока індикаторів з'єднані 46511 4 з виходами другої секції дешифратора, і-ті виходи третьої та четвертої секцій дешифратора з'єднані з входами і-го елемента АБО, вихід якого з'єднаний з і-им входом третього блока індикаторів (і=1,...,10). Пристрій має другу групу датчиків, четвертий блок індикації, одинадцятий елемент АБО, елемент НІ, причому виходи другої групи датчиків з'єднані з відповідними входами дешифратора, входи одинадцятого елемента АБО з'єднані з першим виходом першої секції дешифратора та виходами елементів АБО, вихід одинадцятого елемента АБО з'єднаний з перемикачем режимів роботи пристрою, першим входом четвертого блока індикаторів та через елемент НІ з другим входом четвертого блока індикаторів. Відомий пристрій може бути використаний як для контролю працездатності, так і для прогнозування відмов елементів об'єкта, що розширює його функціональні можливості та підвищує достовірність результатів контролю. Проте до складу пристрою не входить апаратура, що реєструє та дозволяє накопичувати статистичні дані в процесі експлуатації, на базі яких ведеться ефективне точне прогнозування надійності й технічного стану авіаційного обладнання ЛА. Відома наземна автоматизована система контролю технічного стану систем літальних апаратів (Дементьев В.А. Комплексное проектирование систем управления и контроля летательных автоматов. - М.: Машиностроение, 1980. - С.12-14), що містить комутатор К1, комутатор К2, генератор впливів, що задаються, (ГВЗ), перетворювач інформації (ПАК), пристрій допускового контролю (ПДК), пристрій реєстрації та індикації (ПРІ), пристрій керування (ПК). До складу пристрою керування (ПК) може входити запам'ятовувальний пристрій, де зберігається інформація, необхідна для реалізації процесу діагностики як систем ЛА, так і пристроїв HACК. До складу пристрою керування (ПК) входить також і пристрій введення програмної інформації, що визначає програму випробування системи ЛА. При використанні ЦОМ в HACК обробка результатів виміру може здійснюватися за допомогою арифметичного пристрою цієї машини. Комутатор К1, призначений для створення електричних ланцюгів, що зв'язують ЛА із пристроями HACК, комутатор К2 здійснює внутрішню комутацію пристроїв HACК при створенні автомата контролю окремого параметра. Генератор впливів, що задаються, (ГВЗ) забезпечує формування вхідних впливів, що подаються на вхід системи, що перевіряється, для виміру реакції на виході. Перетворювач інформації (ПАК) здійснює вимір реакції системи на заданий вхідний вплив і перетворення вимірюваної величини з аналогової форми в цифрову. Пристрій допускового контролю (ПДК) оцінює відповідність величини контрольованого параметра припустимим значенням. У найпростішому випадку виробляється оцінка параметра «придатний - не придатний» або «менше - норма - більше». Пристрій реєстрації та індикації (ПРІ) служить для документування результатів роботи HACK і візуальної індикації цих результатів. Індикатор дозволяє операторові визначити номер перевірки 5 та результати кількісної і якісної оцінки контрольованого параметра. Реєстрація результатів контролю виконується друкувальним пристроєм. Пристрій керування (ПК) формує команди керування відповідно до програми роботи на пристрої HACК, що визначають характер і послідовність роботи всієї системи контролю. Відома HACК функціонує таким чином. По команді від пристрою керування ПК після включення HACК з пульта оператора подаються команди на: комутатор К1 для створення автомата - контролю окремого параметра; пристрій допускового контролю (ПДК) для завдання допусків на вимірюваний параметр; комутатор К1 для створення електричних ланцюгів, що забезпечують підключення до входу системи, що перевіряється, генератора впливів, що задаються, (ГВЗ); генератор впливів, що задаються, ГЗВ для подачі вхідного впливу на вхід керованої системи. Після певної тимчасової витримки, обумовленої перехідними процесами в контрольованій системі, до виходів системи по команді від пристрою керування ПК підключається автомат контролю параметра. Починається процес виміру параметра за допомогою ПАК. По закінченні процесу виміру (або по команді від пристрою керування ПК), пристроєм допускового контролю (ПДК) здійснюються обробка результату виміру й ухвалення рішення. Якщо значення вимірюваного параметра в нормі, від пристрою допускового контролю (ПДК) в пристрій керування ПК надходить команда «Норма». Одночасно здійснюються індикація параметра й реєстрація результатів його контролю. Пристрій керування ПК здійснює перебудову структури HACК на контроль наступного параметра й т.д. Якщо вимірюваний параметр виявиться не в нормі, то по команді від пристрою керування ПК може початися процес діагностики технічного стану системи ЛА або пристроїв HACК. Відома наземна автоматизована система контролю являє собою вимірювально-інформаційну систему та виконує функції виміру, обробки, індикації й реєстрації результатів контролю. Вимірювальна частина забезпечує вимір тільки окремих параметрів систем ЛА. Обробна частина виконує аналіз результатів виміру, порівняння їх з необхідними й ухвалює рішення щодо технічного стану ЛА. Проте недоліком відомої наземної автоматизованої системи контролю є недостатня глибина перевірки та відсутність детальної перевірки кожного блоку, вузла, агрегату. Система не забезпечує контроль потрібної кількості параметрів та її точність. До того ж відома наземна автоматизована система контролю обладнання (HACК), що не демонтується, яка складається з бортової та наземної частин і пристроїв їхнього сполучення (лінія зв'язку земля - борт) (Диагностирование и прогнозирование технического состояния авиационного оборудования: Учеб. пособие для вузов гражд. Авиации / В.Г. Воробьев, В.В. Глухов, Ю.В. Козлов и, др. Под ред. И.М. Синдеева. М.: Транспорт, 1984. С.171-175). Бортова частина містить комутатор Км, з'єднаний з апаратурою підключення до об'єкта контро 46511 6 лю (авіаційного обладнання, що перевіряється) первинними вимірювальними перетворювачами, цифровими вимірювальними приладами (аналогоцифровими перетворювачами, датчиками) та комутатором параметрів. Наземна частина містить генератор імітаційних сигналів (цифро-аналогові перетворювачі), з'єднаний з комутатором Км, який подає стимулюючі сигнали в об'єкт контролю через пристрої сполучення бортової та наземної частин (бортові рознімання), комутатор каналів, нормалізатор, перетворювач інформації (перетворювач «аналог-код») та центральну обчислювальну машину (апаратуру обробки інформації), яка поєднана з пультом керування, пристроєм відображення (індикатором) та переговорним пристроєм з літаком, а також містить таймер. У спеціалізованій центральній обчислювальній машині (ЦОМ), що є основою відомої HACК у блоці пам'яті є програма перевірки певного виду авіаційного обладнання. По командах керування відповідно до програми генератор імітаційних сигналів через комутатори Км подає стимулюючі сигнали в об'єкт контролю. Контрольовані параметри надходять у первинні вимірювальні перетворювачі, де перетворюються в електричні величини, нормалізуються й через комутатор параметрів видаються в мобільну HACК. Електричні сигнали про стан об'єкта контролю, пройшовши комутатор каналів і нормалізатор, що здійснює контроль імітаційних сигналів, які формуються генератором та іншими джерелами потужних і високовольтних сигналів, попадають у перетворювач інформації (перетворювач «аналог-код»). Інформація про параметри в цифровому коді надходить у спеціалізовану ЦОМ, де, відповідно до програми, рівняється з полем допусків. Результат порівняння видається на пристрій відображення (індикатор) або на друкувальний пристрій. На пульті керування зосереджені всі органи керування роботою HACК. Через нього можливе введення вихідної інформації в блок пам'яті, вивід додаткової інформації, не передбаченої програмою контролю даного обладнання. Є літаковий переговірний пристрій для зв'язку оператора HACК з фахівцем, що працює в літаку. Таймер синхронізує роботу блоків мобільної HACК. Як приклад виконання мобільної HACК недемонтованого обладнання можна привести АСКМартрон 1200. Ця HACК управляється ЦОМ, що має набір програм для проведення різних видів контролю авіаційного обладнання ЛА. ЦОМ управляє процесом контролю, оцінює отримані результати, порівнює їх з допусками й потім у необхідному порядку друкує їх на папері, вказуючи, які регулювання та який ремонт варто провести вручну на контрольованому авіаційному обладнанні ЛА. Зазначена HACК значно скорочує час, затрачуваний на перевірку авіаційного обладнання ЛА. Так, при ручній перевірці блоку тангажу автопілоту літака Боїнг-727 потрібно 5год., а за допомогою зазначеної HACK ця ж перевірка здійснюється за 30хв. Вся система оформлена у вигляді невеликої шафи й пульта керування, розміщена на рухливому причепі й обслуговується техніком середньої кваліфікації. 7 Проте відома наземна автоматизована система контролю не забезпечує реєстрацію потрібної кількості параметрів та її точність, глибина перевірки недостатня. Найбільш близькою за технічною сутністю та результатом, що досягається, щодо запропонованої корисної моделі, є автоматизована система контролю КЛ-39, яка призначена для об'єктивної перевірки технічного стану систем, агрегатів і приладів літака Л-39 при наземних випробуваннях і складається з бортової та наземної частин і з'єднувальних шлангів і кабелів (Техническое описание приборного и специального оборудования самолета Л-39.-ЛО «AERO Vodochody», Чеська республіка, м.Одолена вода, 1987. - Книга 6. - Серия 40. - П.1.11. - С.74-82). Бортова частина містить спеціальні переносні блоки обробки інформації, які на час контролю встановлюються в зазначених місцях виміру та контролю, що виведені на штепсельні бортові рознімання та поєднані з потенціометричними та електромагнітними датчиками аналогових та разових сигналів (датчиками аналогових, бінарних, частотних сигналів та разових сигналів/команд) на поверхню літака з забезпеченням зручності підходу. При цьому датчики аналогових сигналів включають малогабаритні датчики тиску для вимірювання барометричної висоти і приладової швидкості, датчики перенавантажень, датчики кутових переміщень для вимірювання кута відхилення стабілізатора і датчики тахометрів типу ДТЕ-1/ДТЕ-2 для вимірювання частот обертання роторів авіаційних двигунів. Крім цих блоків на час контролю в кабіні літака встановлюється переносна панель керування й вібратор приладової дошки. Наземна частина містить пульт керування, програмний вимірювальний пристрій, що за допомогою універсального перемикача забезпечує вимір і обробку різних електричних величин у будьякому місці відповідно до програми, заданої на перфострічці, та в який вбудовано систему самоконтролю, фотоелектричний пристрій для зчитування з перфострічки та механізм для перемотування стрічки, друкувальний пристрій, що забезпечує запис результатів вимірів, підсумовуючий лічильник, сервоманометр із джерелом тиску, джерела електричної напруги, систему вентиляції та опалення, радіостанцію (переговорний пристрій з літаком). Безпека роботи системи КЛ-39 забезпечена автоматами захисту й запобіжниками, розташованими в шафі джерела системи. Наземна частина автоматизованої системи контролю, що обрана за прототип, розміщена в автофургоні, наприклад, доробленому автомобілі типу УАЗ 452, у спеціальному плечі якого знаходяться з'єднувальні шланги та кабелі. При цьому шланги тиску мають спеціальні наконечники для контролю пневматичної системи літака, а кабелі спеціальні електрорознімання. Відома автоматизована система контролю КЛ39 працює наступним чином. До контрольованого літака система КЛ-39 приєднується за допомогою кабелів і шлангів. Спеціальні переносні блоки на час контролю встановлюються в зазначених місцях виміру та контролю на 46511 8 поверхні літака. Крім цих блоків на час контролю в кабіні літака встановлюється переносна панель керування та вібратор приладової дошки. Наземні випробування здійснюються по заздалегідь складеній програмі контролю, що записана на восьмидоріжечній перфострічці. Програмний вимірювальний пристрій (ПИУ), розміщений у кузові-фургоні автомобіля у відсіку оператора за допомогою універсального перемикача забезпечує вимір і обробку різних електричних величин у будь-якому місці відповідно до програми, заданої на перфострічці. Як вхідна ланка використана фотоелектричний пристрій для зчитування з перфострічки й механізм для перемотування стрічки. Оператор на борту літака включений у програму контролю за допомогою інструкційного магнітофона (словесна інструкція), керованого з перфострічки. Запис результатів вимірів забезпечує друкувальний пристрій. Час роботи електромеханічних блоків - фотоелектричного пристрою для зчитування з перфострічки та друкувального пристрою - реєструється підсумовуючим лічильником. Безпека роботи системи КЛ-39 забезпечена автоматами захисту й запобіжниками, розташованими в шафі джерела системи. У програмному вимірювальному пристрої здійснюється автоматичний контроль зчитування команди з перфострічки й контроль підведення вимірюваної напруги з перетворенням у число з автоматичною сигналізацією перевищення припустимого відхилення. Робота цих систем контролю безперервна із сигналізацією випадкових несправностей (придатний - непридатний). Крім контролю вхідних і вихідних параметрів програмний вимірювальний пристрій забезпечує контроль пошкодження вимірювальних і живильних кабелів, центральних штепсельних рознімань KV-1, KV-3, а система самоконтролю здійснює також контроль та діагностику властиво програмного вимірювального пристрою. Цей контроль можна виконувати від кнопок (вручну) або автоматично за допомогою контрольної програми на перфострічці. За допомогою радіостанція зв'язку, розміщеної в кабіні водія, здійснюється зв'язок з оператором, що знаходиться на борту літака. Автоматизована система контролю, яка вибрана за прототип, дозволяє проведення контрольних операцій без демонтажу систем, блоків, агрегатів, вузлів і розстикування схем, що позначається на ефективності проведення контролю: відсутня необхідність відновлювати систему після контролю; відсутні помилки (порушення у схемі), що виникають при демонтажі та, що найбільш небезпечно, при складанні, а також після проведення контрольних операцій; відсутні трудові затрати на демонтаж і монтаж обладнання, що перевіряється; вивільняється технічний персонал, зайнятий на демонтажі та монтажі обладнання, що контролюється; скорочується час проведення контролю. Проте відома наземна автоматизована система контролю не забезпечує реєстрацію потрібної кількості параметрів та її точність, глибина перевірки недостатня. В основу корисної моделі, що заявляється, поставлена задача удосконалення наземної автома 9 тизованої системи контролю шляхом введення додаткових конструктивних елементів - датчиків та блоків, нового виконання відомих, що дозволить здійснити автоматичну обробку контрольованих параметрів вимірів з високою точністю, і, крім того знизити вартість системи за рахунок використання низько вартісних і високонадійних конструктивних елементів вітчизняного виробництва. Поставлена задача досягається тим, що в наземній автоматизованій системі контролю, яка складається з бортової та наземної частин, що з'єднані шлангами та кабелями, при цьому наземна частина містить програмний вимірювальний пристрій, блоки обробки сигналів, джерело електричної напруги, друкувальний пристрій, переговорний пристрій з літаком, пульт керування, причому входи програмного вимірювального пристрою з'єднані з виходами блоків обробки сигналів, джерела електричної напруги та пульта керування, а бортова частина містить панель керування, виходи якої з'єднані з входами датчиків аналогових, бінарних, частотних сигналів та разових сигналівкоманд, виходи яких виведені на бортові рознімання, які поєднані з входами блоків обробки сигналів, відповідно до корисної моделі, як блоки обробки сигналів використаний блок перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналівкоманд, вхід якого поєднаний з виходами бортових рознімань, входи яких поєднані з виходами до 61 датчика аналогових, бінарних, частотних сигналів та разових сигналів-команд, при цьому як програмний вимірювальний пристрій використаний персональний комп'ютер. Корисна модель, що заявляється, дозволяє здійснити автоматичну обробку контрольованих параметрів вимірів з високою точністю, і, крім того знизити вартість системи за рахунок використання конструктивних елементів вітчизняного виробництва з більш низькою вартістю та високою надійністю. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак та технічним результатом, що досягається, полягає в наступному. Використання як блоку обробки сигналів блоку перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналівкоманд, вхід якого поєднаний з виходами бортових рознімань, входи яких поєднані з виходами до 61 датчика аналогових, бінарних, частотних сигналів та разових сигналів-команд, а як програмного вимірювального пристрою персонального комп'ютера дозволяє значно підвищити точність контролю стану систем літака. Конструкція технічного рішення наземної автоматизованої системи контролю пояснюється кресленням. На Фіг.1 наведена загальна блок-схема наземної автоматизованої системи контролю. Наземна автоматизована система контролю (Фіг.1) складається з наземної 1 та бортової 2 частин, що з'єднані шлангами та кабелями 3. При цьому наземна частина 1 містить персональний комп'ютер 4, блок 5 перетворювання та нормалізації аналогових, бінарних, частотних сигналів та 46511 10 разових сигналів-команд, джерело електричної напруги 6, друкувальний пристрій 7, переговорний пристрій з літаком 8, пульт керування 9. Причому входи персонального комп'ютера 4 з'єднані з виходами блока 5 перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналів-команд, джерела електричної напруги 6 та пульта керування 9. Бортова частина 2 містить панель керування 10 та бортові рознімання 11, виходи яких поєднані з входами блока 5 перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналів-команд. При цьому виходи панелі керування 10 з'єднані з входами до 64 датчиків аналогових, бінарних, частотних сигналів та разових сигналів-команд, обробки сигналів, що реєструють такі параметри як тиск у гідросистемі 12, сигналізація швидкості 325 км/год. 13, відмова перетворювача 1 на 115 В 14, відмова перетворювача 2 на 115 В 15, закрилки 0 градусів 16, закрилки 44 градуса 17, запуск двигуна 18, АЗС - автоматичний запуск двигуна 19, кількість палива 20, напруга на акумуляторі (на шині АБ) 21, вихідна напруга перетворювача 22, вихідна частота перетворювача 23, вихідна напруга 3/2 (UPА) 24, вихідна напруга 1/2 (UPB) 25, вихідна напруга 1/3 (UPC) 26, вихідна частота (FPT) 27, струм живлення 28, вихідна напруга 3/2 (ULA) 29, вихідна напруга 2/3 (ULB) 30, вихідна напруга 3/2 (ULC) 31, вихідна частота (FPL) 32, струм 1-й фази 33, струм 2-й фази 34, струм 3-й фази 35, напруга на головній шині 36, падіння напруги проміж шиною АБ і головною шиною (UAS) 37, падіння напруги проміж шиною ОГ і головною шиною (UOS) 38, напруга живлення поперед шунтом 39, напруга живлення позаду шунта 40, включення ГА184 41, включення основного генератора 42, температура навколишнього середовища 43, барометричний тиск 44, небезпечна вібрація двигуна 45, живлення паливного насоса «Сапфір» відключено 46, включення електростартера 47, тиск масла паливного насоса «Сапфіра» 48, генератор з незалежним порушенням 49, керування запуском двигуна 50, включення СВ-25 на двигуні 51, клапан масла З-Р, що перекриває, включений 52, включення паливного насоса «Сапфір» 53, сигналізація тиску в прикінцевих баках 54, сигнал «НЕ ЗАПУСКАЙ» 55, наземне джерело 56, запуск паливного насоса «Сапфір» 57, АЗС-САРПП 58, контроль ВЕРБ-300 59, частота обертання ротора компресора високого тиску (РКВТ) 60, частота обертання ротора компресора низького тиску (РКНТ) 61, температура вихідних газів 62, температура масла двигуна 63, тиск масла двигуна 64, тиск палива перед форсунками 65, вібрація двигуна 66, положення важеля керування двигуном 67, оберти паливного насоса «Сапфір» 68, напруга сервоклапана 69, датчик температури 70, напруга основного генератора 71, запуск турбостартера 72. Наземна автоматизована система контролю працює наступним чином. Наземна автоматизована система контролю здійснює виміри та реєстрації параметрів систем літального апарату при проведенні контрольних наземних випробувань (газовок) і розрахована для роботи в умовах помірного клімату, при темпера 11 турах навколишнього середовища від -30°С до +40°С. Електроживлення системи здійснюється від джерела електричної напруги 6 - однофазного змінного струму частотою 50Гц, номінальною напругою 220В. Струм споживання від мережі змінного струму напругою 220В, 50Гц і не перевищує 5А. Сигнали перевірки систем літального апарату відповідають технічному опису. До контрольованого літального апарату за допомогою кабелів і шлангів 3 в зазначених місцях виміру та контролю на поверхні літака – бортових розніманнях 11 - приєднується блок 5 перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналів-команд. З'єднання блоку 5 перетворювання та нормалізації аналогових, бінарних, частотних сигналів та разових сигналів-команд з персональним комп'ютером 4 здійснюється за допомогою кабелю послідовного порту. Керування наземною автоматизованою системою контролю здійснюється за допомогою персонального комп'ютера 4 типу IBM PC з використанням спеціалізованого програмного забезпечення, що призначено для тестування основних параметрів літального апарату. Програма забезпечує зчитування всіх сигналів чотири рази в секунду. Всі отримані дані записуються у файл. Програма може працювати у двох режимах: - режим виміру й візуалізації даних ("Сканування"); - режим аналізу даних ("Очікування"). Основною відмінністю даних режимів є джерело даних для програми. У режимі виміру й візуалізації дані зчитуються із пристрою сполучення через плати аналогового й цифрового введеннявиводу, при цьому формується файл даних, а в режимі аналізу - дані зчитуються з файлу звіту, що формується в першому режимі. Для переведення програми в режим виміру й візуалізації даних необхідно нажати на кнопку "Старт". При цьому сис 46511 12 тема починає зчитувати дані із плат аналогового й цифрового вводу-виводу. Дані перетворяться по внутрішньому алгоритмі й виводяться в поле аналогових і бінарних сигналів, і, так само, в поле візуалізації аналогових сигналів. Паралельно формуються масиви даних по кожному сигналу, які записуються у файл. Для переведення програми в режим аналізу даних необхідно нажати на кнопку «Скасування» у вікні вибору режиму роботи програми. При цьому система відключається від блоку 5 перетворювання та нормалізації сигналів. При цьому дані будуть завантажені в поле аналогових і бінарних сигналів. Для відображення сигналів у поле візуалізації необхідно в панелі аналогових сигналів перевести до активного стану необхідні сигнали. Інформація про параметри в цифровому коді надходить у персональний комп'ютер 4, де, відповідно до програми, рівняється з полем допусків. Результат порівняння видається на монітор або на друкувальний пристрій 7. На пульті керування 9 зосереджено керування роботою системи. Через нього можливе введення вихідної інформації в блок пам'яті, вивід додаткової інформації, не передбаченої програмою контролю даного обладнання. Є літаковий переговірний пристрій 8 для зв'язку оператора з фахівцем, що працює в літаку. Наземна автоматизована система контролю, що заявляється, послідовно вирішує завдання збору, передачі, обробки й аналізу інформації про об'єкт контролю з метою визначення його технічного стану. При цьому більшість операцій здійснюється без участі операторів. НАСК має високу вірогідність контролю, простотою обслуговування та різко скорочують часові витрати при діагностуванні й прогнозуванні стану ЛА, і, крім того, знизити вартість системи за рахунок використання високонадійних конструктивних елементів вітчизняного виробництва. 13 Комп’ютерна верстка А. Рябко 46511 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSurface automated control system
Автори англійськоюKrotko Volodymyr Yevheniiovych, Krotko Dmytro Volodymyrovych, Zubyk Valerii Leonidovych, Kochurov Volodymyr Leonidovych
Назва патенту російськоюНаземная автоматизированная система контроля
Автори російськоюКротько Владимир Евгеньевич, Кротько Дмитрий Владимирович, Зубик Валерий Леонидович, Кочуров Владимир Леонидович
МПК / Мітки
МПК: B64D 43/00, G05B 23/02
Мітки: наземна, система, контролю, автоматизована
Код посилання
<a href="https://ua.patents.su/7-46511-nazemna-avtomatizovana-sistema-kontrolyu.html" target="_blank" rel="follow" title="База патентів України">Наземна автоматизована система контролю</a>
Автоматизована система контролю
Номер патенту: 60890
Опубліковано: 15.10.2003
Автор: Кучмієв Володимир Гавриїлович
МПК: G06F 11/30
Мітки: система, контролю, автоматизована
Формула / Реферат:
Автоматизована система контролю, що містить шину вхідних даних, об'єкт контролю, шину вихідних даних, схему порівняння, причому шина вхідних даних з'єднана з входами об'єкта контролю, виходи якого з'єднані з шиною вихідних даних, яка відрізняється тим, що має перший та другий формувачі настройок, блок керування, перший та другий універсальні алгоритмічні перетворювачі, запам'ятовуючий пристрій, причому шина вхідних даних з'єднана з першою...
Автоматизована система контролю
Номер патенту: 21002
Опубліковано: 15.02.2007
Автори: Дергачов Володимир Андрійович, Кулік Тамара Васильовна, Кулік Анатолій Степанович
МПК: G06F 11/30
Мітки: автоматизована, система, контролю
Формула / Реферат:
Автоматизована система контролю, що містить шину вхідних даних, об'єкт контролю, шину вихідних даних, схему порівняння, блок керування, універсальний алгоритмічний перетворювач, запам'ятовуючий пристрій, причому шина вхідних даних з'єднана з входами об'єкта контролю, виходи якого з'єднані з шиною вихідних даних, виходи універсального алгоритмічного перетворювача з'єднані з першою групою входів схеми порівняння, вихід схеми порівняння...
Автоматизована система для металографічного контролю якості металів
Номер патенту: 42834
Опубліковано: 27.07.2009
Автори: Гонтовий Сергій Вікторович, Ємельянов Віталій Олександрович
МПК: G06E 3/00, G06K 9/00, G06N 1/00
Мітки: контролю, металографічного, система, якості, металів, автоматизована
Формула / Реферат:
1. Автоматизована система для металографічного контролю якості металів, що включає: мікроскоп, відеокамеру, комп'ютер оператора, комп'ютер технолога, яка відрізняється тим, що система є розподіленою, тобто виконаною за типом клієнт-серверної архітектури з локальною мережею для передачі даних і сервером, призначеним для накопичення даних стосовно досліджуваних металів та для аналізу зображень мікроструктур металів.2. Система за п. 1,...
Автоматизована система контролю
Номер патенту: 63287
Опубліковано: 15.03.2007
Автори: Бондар Анатолій Юрьйович, Лютов Ігор Валерійович, Маслак Віктор Миколайович, Баранов Юрій Вячеславович
МПК: G08C 19/16, G08C 17/00
Мітки: контролю, автоматизована, система
Формула / Реферат:
Автоматизована система контролю, яка складається з диспетчерського пункту, який включає в себе послідовно з'єднані модем і радіостанцію, та винесеного технологічного контролера, в який включено модем, радіостанцію, пристрій узгодження з об’єктом, пристрій комутації і контролю резервного живлення, акумуляторну батарею, причому перший і другий входи та перший і другий виходи модема з'єднані з радіостанцією, а третій і четвертий входи і третій...
Автоматизована система контролю
Номер патенту: 21000
Опубліковано: 15.02.2007
Автори: Дергачова Ганна Володимирівна, Кошовий Микола Дмитрович, Цеховський Максим Володимирович, Сіроклин Віталій Павлович
МПК: G06F 11/30
Мітки: контролю, автоматизована, система
Формула / Реферат:
Автоматизована система контролю, що містить об’єкт контролю, блок пам’яті, схему порівняння, вихідну шину, яка відрізняється тим, що містить датчик переміщення, параметричний датчик, два двійкові лічильники, другий і третій блоки пам’яті, другу схему порівняння, елемент АБО, два елементи затримки, елемент І, формувач імпульсів, перетворювач, причому вихід датчика переміщення з’єднаний з рахунковим входом першого двійкового лічильника та через...
Попередній патент: Система регулювання витрати рідини при димоутворенні
Наступний патент: Пристрій для репозиції кісткових відламків
Випадковий патент: Спосіб очищення гемоглобіну з сирого розчину