Модель робочого колеса поворотно-лопатевої гідротурбіни
Номер патенту: 53137
Опубліковано: 27.09.2010
Автори: Зудочкин Ігор Степанович, Гладишев Сергій Вікторович, Шилов Валерій Павлович, Тарабан Сергій Володимирович, Веремеєнко Ігор Степанович, Андрющенко Сергій Олександрович
Формула / Реферат
1. Модель робочого колеса поворотно-лопатевої гідротурбіни, що призначена для вимірювання поворотного моменту на лопаті моделі за допомогою тензометричних датчиків, що розміщена в камері модельного блока, і така, що містить корпус; обтічник, закріплений на корпусі; лопаті з кріпильними елементами, що встановлені в корпусі, і, зокрема, дві досліджувані лопаті, що оснащені хвостовиком, який виконаний з цапфою для лопаті, з поясочком для жорсткого кріплення і з можливістю наклеювання тензометричних датчиків і закріплений на лопаті; втулкою, що закріплена на корпусі; підшипником кочення, що встановлений на цапфі і у втулці, і тензометричними датчиками, що наклеєні на хвостовику, яка відрізняється тим, що камера модельного блока і обтічник виконуються з плексигласу; досліджувана лопать виконується з додатковою цапфою; втулка закріплюється із зовнішнього боку корпуса; підшипник кочення встановлюється одночасно на додатковій цапфі лопаті і на цапфі хвостовика; досліджувана лопать додатково оснащена кільцем, встановленим у втулці; втулкою обтискною, встановленою на хвостовику, і кільцем притискним, встановленим на втулці обтискній; додатково в обтічнику встановлюються тензопідсилювач з АЦП і радіомодем.
2. Модель робочого колеса поворотно-лопатевої гідротурбіни за п. 1, яка відрізняється тим, що містить хвостовик з кріпильним елементом і цапфою для лопаті на передньому кінці, з розточкою в середній частині, з центральним глухим отвором і з поясочком та буртиком на задньому кінці.
Текст
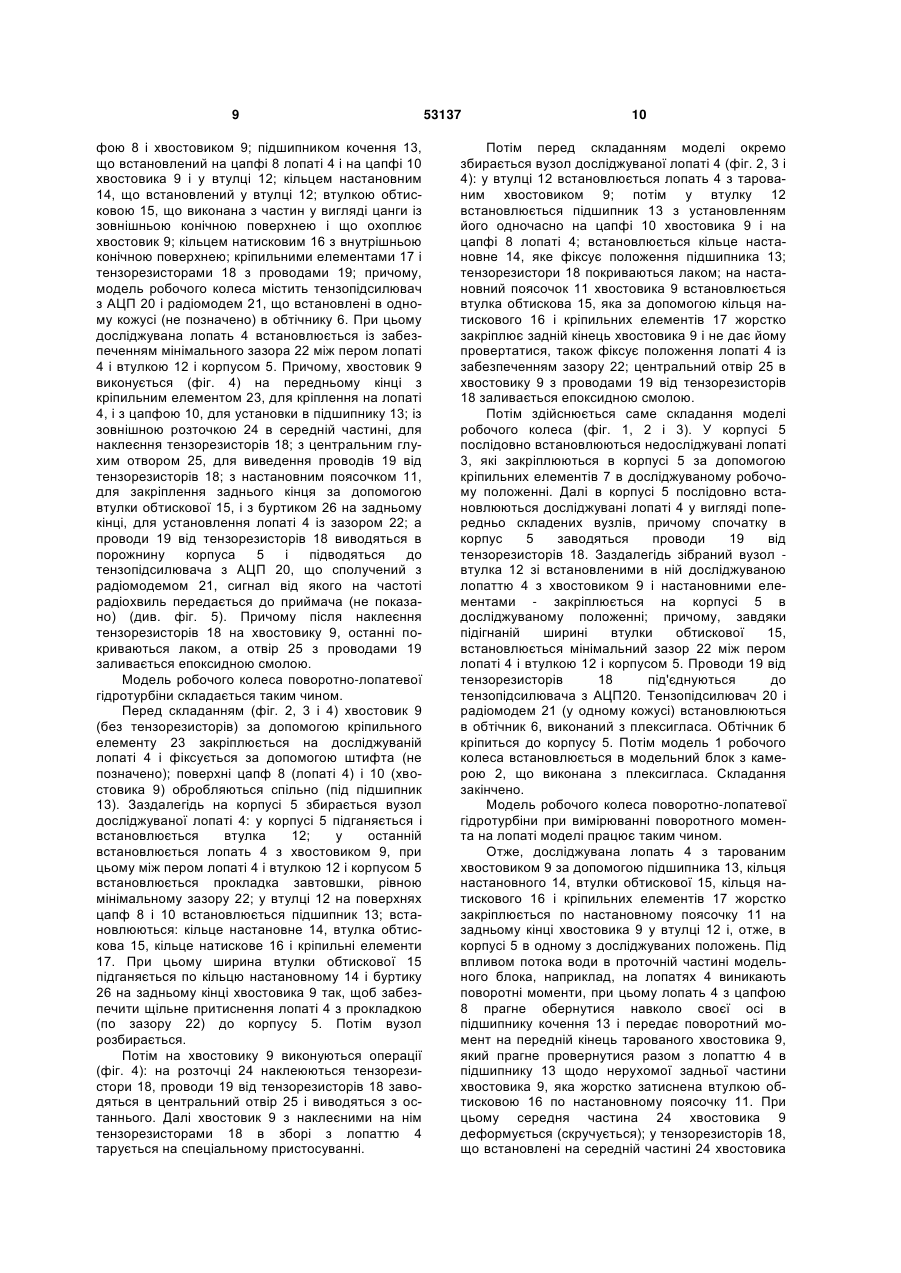
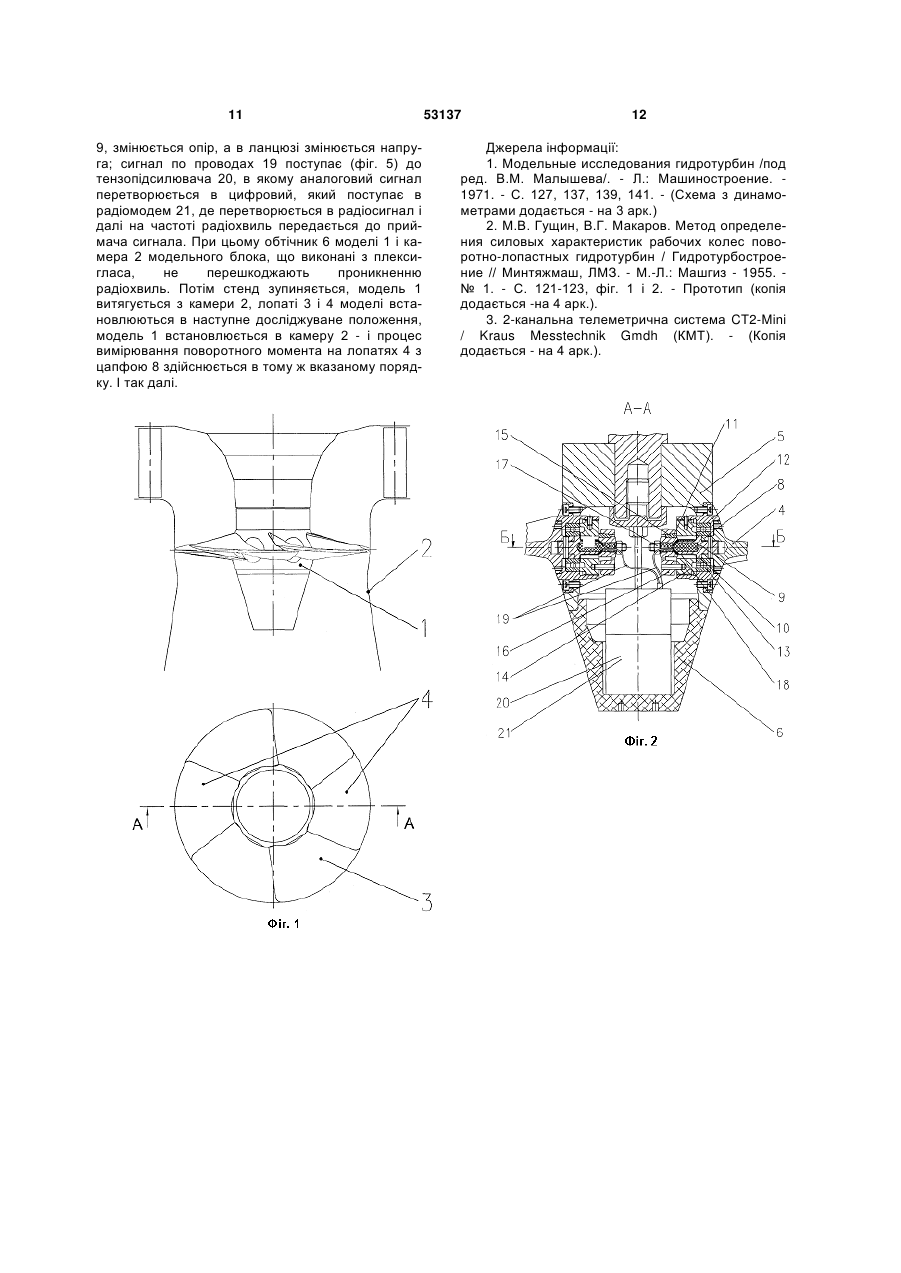
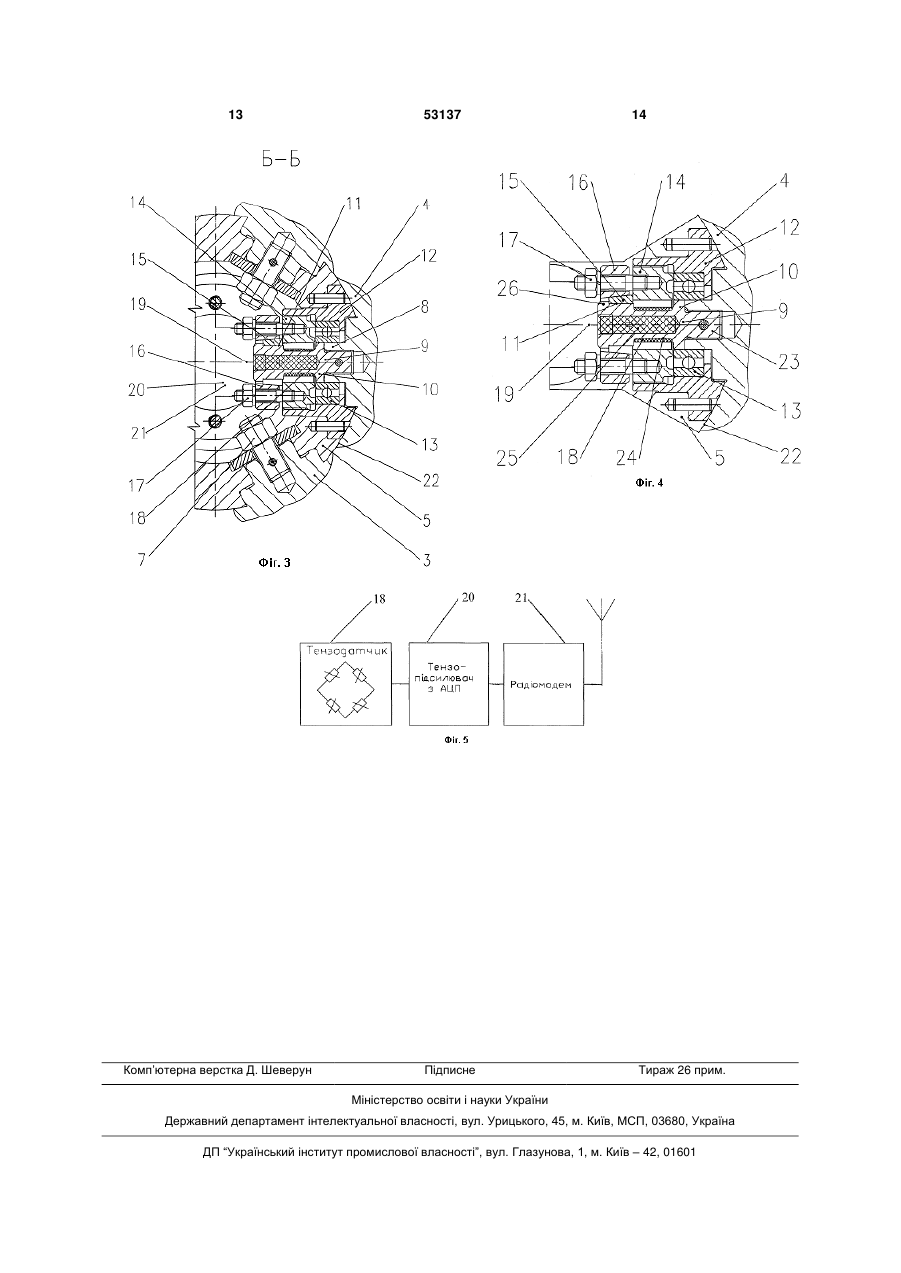
1. Модель робочого колеса поворотнолопатевої гідротурбіни, що призначена для вимірювання поворотного моменту на лопаті моделі за допомогою тензометричних датчиків, що розміщена в камері модельного блока, і така, що містить корпус; обтічник, закріплений на корпусі; лопаті з кріпильними елементами, що встановлені в корпусі, і, зокрема, дві досліджувані лопаті, що оснащені хвостовиком, який виконаний з цапфою для лопаті, з поясочком для жорсткого кріплення і з можли U 2 (19) 1 3 динамометр, встановлений поза відсмоктувальною трубою модельного блока і сполучений зі штангою, а важелі досліджуваних лопатей сполучені з тарілкою штанги за допомогою кульових шарнірів. При повороті лопаті під впливом потока води важелі досліджуваних лопатей впливають на тарілку штанги, а штанга переміщається в осьовому напрямі і впливає на пружиний динамометр. При цьому камера модельного блока і обтічник моделі виконуються з будь-якого матеріала. Недоліки відомої моделі робочого колеса полягають в наступному: - громіздкість і незручність установки вимірювальної системи; -недостатня точність вимірювань, у зв'язку з механічними втратами; - менша точність і менша зручність в порівнянні з вимірюванням тензометричними датчиками [2]. Відома також модель робочого колеса поворотно-лопатевої гідротурбіни [І], що призначена для вимірювання поворотного момента на лопаті моделі за допомогою індуктивних датчиків, що розміщена в камері модельного блоку і така, що містить корпус; обтічник, закріплений на корпусі; лопаті з кріпильними елементами, що встановлені в корпусі, і, зокрема, дві досліджувані лопаті, що забезпечені хвостовиком, виконаним з цапфою для лопаті, з настановним поясочком для жорсткого кріплення і з можливістю наклеєння індуктивних датчиків і закріпленим на лопаті; втулкою, що закріплена на корпусі; підшипником кочення, що встановлений на цапфі і у втулці, і індуктивними датчиками, що наклеєні на хвостовику, принцип дії яких заснований на зміні величини індукції унаслідок зміни зазора в датчику під дією моментного навантаження. При цьому камера модельного блока і обтічник моделі виконуються з будь-якого матеріала; цапфа досліджуваної лопаті виконується окремо від лопаті - на хвостовику, подібно до моделі робочого колеса при вимірюванні поворотного момента на лопаті з тензометричними датчиками [2]. Складання моделі робочого колеса здійснюється подібно до моделі з тензометричними датчиками [2]. Заздалегідь хвостовик, без датчиків, виставляється співісній до осі лопаті і кріпиться на лопаті; потім на хвостовику наклеюються індуктивні датчики і далі хвостовик з індуктивними датчиками тарується. При складанні моделі втулка з підшипником виставляється зсередини корпуса співісно вікну під лопать в корпусі і кріпиться до корпусу. Потім лопать з хвостовиком заводиться у втулку з установкою в підшипнику цапфи на хвостовику . При цьому проводи від датчиків заводяться в корпус і виводяться по валу модельного блока за межі останнього. Причому, сигнал від індуктивних датчиків поступає по проводах, пропущених через вал, до колектора, з якого за допомогою токозйомника сигнал передається по проводах на вимірювальний пристрій, що фіксує величину індукції в ланцюзі. Недоліки відомої моделі робочого колеса полягають в наступному: 53137 4 - менша стабільність і надійність індуктивних датчиків в порівнянні з тензометричними датчиками; - наявність поперечного навантаження на хвостовик по цапфі від ваги лопаті і від осьової гідравлічної сили потоку на лопаті, що негативно впливає на величину деформації індуктивних датчиків, що заміряється; - обертання проводів від індуктивних датчиків разом з робочим колесом і валом, що вимагає установки колектора і токозйомника поза гідроагрегатом для з'єднання вказаних проводів з вимірювальним пристроєм; - протяжність сполучних проводів, що проходять через весь вал гідроагрегата, від індуктивних датчиків до токозйомника; недостатня надійність токозйомника унаслідок рухомого контакта і зносу; - непроникність для радіосигнала камери модельного блока і обтічника моделі з будь-якого матеріала, окрім плексигласа; - незручність складання досліджуваної лопаті з настановними елементами в корпусі моделі. Найбільш близьким з виявлених аналогів до передбачуваної корисної моделі є модель робочого колеса поворотно-лопатевої гідротурбіни [2], що призначена для вимірювання поворотного момента на лопаті моделі за допомогою тензометричних датчиків (тензодатчиків), що розміщена в камері модельного блоку і така, що містить корпус; обтічник, що закріплений на корпусі; лопаті з кріпильними елементами і, зокрема, дві досліджувані лопаті, що забезпечені хвостовиком, виконаним з цапфою для лопаті, з настановним поясочком для жорсткого кріплення і з можливістю наклеєння тензодатчиків і закріпленим на лопаті; втулкою, що закріплена на корпусі; підшипником кочення, що встановлений на цапфі і у втулці, і тензодатчиками, що наклеєні на хвостовику, принцип дії яких заснований на зміні напруги при розбалансуванні вимірювального моста унаслідок скручування, наприклад, хвостовика, з передачею сигнала за допомогою проводів до вимірювального приладу, що фіксує напругу в ланцюзі. При цьому камера модельного блока і обтічник моделі виконуються з будь-якого матеріала; досліджувана лопать виконується окремо від цапфи, а цапфа виконується на хвостовику. Заздалегідь хвостовик, без тензодатчиків, виставляється співісній до осі лопаті і кріпиться на лопаті; потім на хвостовику наклеюються тензодатчики, а проводи виводяться в центральний отвір хвостовика, і далі хвостовик з тензодатчиками разом з лопаттю тарується. Причому, тензодатчики захищаються від дії води спеціальним покриттям, наприклад, гумовою трубкою. Потім, при складанні, втулка з підшипником зсередини корпусу виставляється співісною вікну під лопать в корпусі і кріпиться до корпусу. Потім лопать з хвостовиком заводиться у втулку з установленням цапфи на хвостовику в підшипнику, в якій передній кінець хвостовика разом з лопаттю може вільно повертатися під дією поворотного момента, прикладеного до лопаті. При цьому проводи від тензодатчиків заводяться в корпус і виводяться по 5 валу модельного блока за межі останнього до колектора, з якого за допомогою токозйомника сигнал передається до електронного вимірювального пристрою. Причому, втулка, що закріплена на корпусі, виконується з розрізним заднім кінцем, із затиском типа «хомут»; задній кінець хвостовика по настановному поясочку за допомогою затиску типу «хомут» жорстко прикріпляється до корпусу моделі робочого колеса і повертатися не може. Необхідний мінімальний зазор між пером лопаті і корпусом моделі виставляється за допомогою болтів настановних зсередини корпусу, при контролі цього зазору зовні корпусу, а потім задній кінець хвостовика по настановному поясочку жорстко закріплюється щодо корпусу за допомогою заднього кінця втулки. Причому хвостовик виконується з посадочним буртиком на передньому кінці, тобто на найближчому до пера лопаті, для кріплення на лопаті; з цапфою для лопаті на передньому кінці, для установлення в підшипнику; з розточкою в середній частині, для наклеєння тензодатчиків; з центральним глухим отвором, для виведення проводів від тензодатчиків, і з настановним поясочком на задньому кінці, для затиску у втулці. Недоліки відомої моделі робочого колеса полягають в наступному: - наявність поперечного навантаження на хвостовик по цапфі від ваги лопаті і від осьової гідравлічної сили потоку на лопаті, що негативно впливає на величину деформації тензодатчиків, що заміряється; - обертання проводів від тензометричних датчиків разом з робочим колесом і валом, що вимагає установки колектора і токозйомника поза гідроагрегатом для з'єднання вказаних проводів з вимірювальним пристроєм; - протяжність сполучних проводів, що проходять через весь вал гідроагрегата, від тензометричних датчиків до токозйомника; недостатня надійність токозйомника унаслідок рухомого контакта і зносу; - непроникність для радіосигнала камери модельного блока і обтічника моделі з будь-якого матеріалу, окрім плексигласа. - незручність складання в корпусі моделі досліджуваної лопаті з настановними елементами. Відома також система СТ2-Міпі [3], що встановлюється на елементах, що обертаються або рухаються, для забезпечення безконтактної передачі ряда параметрів вимірювань, наприклад, напруги, замість використання довгих кабелів для підключення тензодатчиків до комп'ютера. При цьому тензодатчики підключаються до системи через водонепроникні роз'єми. Зміряні значення обробляються в аналоговому форматі, в тензопідсилювачі з АЦП (аналого-цифровим перетворювачем) перетворюються у формат цифровий, потім в радіомодемі перетворюються в радіосигнали і передаються на частоті радіохвиль на стаціонарний приймач, що розташований на транспортному засобі або в кабіні вертольота, або, наприклад, на пульті управління дослідницького стенда, і далі передаються на комп'ютер. 53137 6 У основу передбачуваної корисної моделі поставлено завдання створити таку модель робочого колеса поворотно-лопатевої гідротурбіни, що призначена для вимірювання поворотного момента на лопаті моделі за допомогою тензометричних датчиків, нове виконання якої дозволило б збільшити точність вимірювання поворотного момента і спростити схему передачі сигналів від тензометричних датчиків до вимірювального пристрою. Корисна модель, що заявляється, характеризується тим, що модель робочого колеса поворотно-лопатевої гідротурбіни, яка призначена для вимірювання поворотного момента на лопаті моделі за допомогою тензометричних датчиків і розміщена в камері модельного блока, містить корпус; обтічник, що закриплений на корпусі; лопаті з кріпильними елементами, що встановлені в корпусі, і зокрема, дві досліджувані лопаті, що забезпечені хвостовиком, виконаним з цапфою для лопаті, з настановним поясочком для жорсткого кріплення і з можливістю наклеєння тензометричних датчиків і закріпленим на лопаті; втулкою, що закріплена на корпусі; підшипником кочення, що встановлений на цапфі і у втулці, тензометричними датчиками, що наклеєні на хвостовику; причому, хвостовик виконується з кріпильним елементом і цапфою для лопаті на передньому кінці, з розточкою в середній частині, з центральним глухим отвором і з настановним поясочком на задньому кінці. При цьому відмітними ознаками корисної моделі, що заявляється, в порівнянні з прототипом є: - виконання камери модельного блока і обтічника моделі з плексигласа; - виконання досліджуваної лопаті з додатковою цапфою; - установлення і закріплення втулки із зовнішнього боку корпуса; - установлення підшипника кочення одночасно на додатковій цапфі лопаті і на цапфі хвостовика; - установлення додатково кільця настановного у втулці; - установлення додатково втулки обтискової на хвостовику; - установлення додатково кільця натискового на втулці обтисковій; - установлення додатково в обтічнику тензопідсилювача з АЦП і радіомодема; - виконання хвостовика з додатковим буртиком на задньому кінці. Виконання моделі робочого колеса поворотнолопатевої гідротурбіни по обмежувальних ознаках дозволяє визначити величину поворотного моменту на лопаті моделі за допомогою тензометричних датчиків. Виконання камери модельного блока і обтічника моделі з плексигласа дозволяє забезпечити проникнення радіохвиль від радіомодема до приймача з комп'ютером. Виконання досліджуваної лопаті з додатковою цапфою дозволяє спростити кріплення хвостовика на лопаті і понизити трудомісткість виготовлення хвостовика, також дозволяє перерозподілити 7 поперечні навантаження, що викликаються вагою лопаті і осьовою гідралічною силою на лопаті, на цапфі лопаті і на цапфі хвостовика. Установлення і закріплення втулки зовні корпусу дозволяє встановити в ній лопать з цапфою і хвостовиком, підшипник кочення, кільце настановне, також втулку обтискову на хвостовику і кільце натискове без збільшення товщини стінки корпуса, а також здійснити складання у втулці вказаних елементів поза корпусом, а потім здійснити установлення в корпусі втулки в блоці з лопаттю і настановними елементами. Установлення підшипника кочення одночасно на додатковій цапфі лопаті і на цапфі хвостовика дозволяє забезпечити співвісність хвостовика і лопаті і забезпечити перерозподіл поперечних навантажень, що викликаються вагою лопаті і осьовою гідравлічною силою на лопаті, на цапфі лопаті і на цапфі хвостовика. Установлення у втулці додатково кільця настановного дозволяє зафіксувати положення підшипника кочення на цапфі лопаті і у втулці, забезпечити подальше збирання настановних елементів на хвостовику і тим самим забезпечити установлення досліджуваної лопаті в корпусі. Установлення додатково втулки обтискової на хвостовику дозволяє, завдяки роз'ємному виконанню і зовнішній конічній поверхні і за допомогою кільця натискового і кріпильних елементів, забезпечити закріплення заднього кінця хвостовика і, відповідно, положення лопаті в досліджуваному положенні, забезпечити нерухомість задньої частини хвостовика при повороті лопаті разом з переднім кінцем хвостовика під впливом поворотного момента, а при її певній ширині дозволяє забезпечити виконання мінімального зазора між пером лопаті і корпусом і втулкою. Установлення додатково кільця натискового на втулці обтисковій дозволяє, завдяки внутрішній конічній поверхні і за допомогою кріпильних елементів, забезпечити закріплення заднього кінця хвостовика втулкою обтисковою відносно втулки і, відповідно, забезпечити фіксацію лопаті в досліджуваному положенні, забезпечити нерухомість заднього кінця хвостовика при повороті лопаті разом з переднім кінцем хвостовика під впливом поворотного моменту. Установлення додатково в обтічнику тензопідсилювача з АЦП і радіомодема дозволяє перетворити аналоговий сигнал в цифровий, перетворити останній в радіосигнал і забезпечити передачу сигналу від тензометричних датчиків на частоті радіохвиль на приймач за межами модельного блоку і тим самим відмовитися від проводів у валу модельного блока, від колектора для проводів, що підводять, і від токозйомника поза модельним блоком і спростити процес передачі сигнала від тензометричних датчиків до приймача сигналу. Виконання хвостовика з додатковим буртиком на задньому кінці дозволяє, за допомогою виконання відповідної ширини втулки обтискової, що встановлена між буртиком і кільцем настановним, забезпечити мінімальний зазор між фланцем і пером лопаті і корпусом і втулкою. 53137 8 Виконання вищезгаданих відмітних ознак дозволяє виконати складання досліджуваної лопаті моделі з хвостовиком у втулці окремо від корпусу і потім здійснити установлення складеного вузла цілком в корпус, що дозволяє спростити процес складання, підвищити якість складання і підвищити якість установлення хвостовика, що, відповідно, дозволяє підвищити точність вимірювання поворотного момента на лопаті моделі. В цілому, сукупність суттєвих ознак корисної моделі, що заявляється, дозволяє досягти технічний результат - отримати таку модель робочого колеса поворотно-лопатевої гідротурбіни, що призначена для вимірювання поворотного момента на лопаті моделі за допомогою тензометричних датчиків, виконання якої дозволяє спростити процес складання, підвищити якість складання, спростити передачу сигнала від тензодатчиків до вимірювального пристрою і, відповідно, підвищити точність вимірювання поворотного момента на лопаті моделі. Передбачувана корисна модель ілюструється кресленнями, на яких показано: фіг. 1 - установка моделі робочого колеса на дослідницькому стенді при вимірюванні поворотного момента на лопаті моделі; фіг. 2 - модель робочого колеса з досліджуваними лопатями в подовжньому розрізі по А-А на фіг. 1; фіг. 3 - модель робочого колеса, зокрема, з досліджуваними лопатями, в поперечному розрізі по Б-Б на фіг. 2; фіг. 4 - досліджувана лопать з хвостовиком і настановними елементами; фіг. 5 - схема передачі сигнала від тензометричних датчиків (тензорезисторів) до тензопідсилювача з АЦП і радіомодема і далі на частоті радіохвиль до приймача з комп'ютером. Модель 1 робочого колеса поворотнолопатевої гідротурбіни, що призначена для вимірювання поворотного момента на лопаті моделі за допомогою тензометричних датчиків (тензорезисторів), розміщується (див. фиг.1) в камері 2 і на валу (не показано) модельного блока (не позначено) науково-дослідного стенда (не показано) і містить недосліджувані лопаті 3 і досліджувані лопаті 4. При цьому вимірювання поворотного момента здійснюється на двох досліджуваних лопатях 4, розташованих діаметрально протилежно. При цьому модель робочого колеса поворотно-лопатевої гідротурбіни містить (фіг. 2, 3 і 4) корпус 5; обтічник 6, закріплений на корпусі 5; ідентичні за профілем недосліджувані лопаті 3 з кріпильними елементами 7 і дві досліджувані лопаті 4, що встановлені в корпусі 5; при цьому досліджувана лопать 4 виконується з додатковою цапфою 8 і забезпечена хвостовиком 9, виконаним з цапфою 10 на передньому кінці, з настановним поясочком 11 на задньому кінці і з можливістю наклеєння на нім тензорезисторів і закріпленим на лопаті 4 за допомогою кріпильного елементу; втулкою 12, що встановлена в корпусі 5, в якій безпосередньо встановлюється лопать 4 з цап 9 фою 8 і хвостовиком 9; підшипником кочення 13, що встановлений на цапфі 8 лопаті 4 і на цапфі 10 хвостовика 9 і у втулці 12; кільцем настановним 14, що встановлений у втулці 12; втулкою обтисковою 15, що виконана з частин у вигляді цанги із зовнішньою конічною поверхнею і що охоплює хвостовик 9; кільцем натисковим 16 з внутрішньою конічною поверхнею; кріпильними елементами 17 і тензорезисторами 18 з проводами 19; причому, модель робочого колеса містить тензопідсилювач з АЦП 20 і радіомодем 21, що встановлені в одному кожусі (не позначено) в обтічнику 6. При цьому досліджувана лопать 4 встановлюється із забезпеченням мінімального зазора 22 між пером лопаті 4 і втулкою 12 і корпусом 5. Причому, хвостовик 9 виконується (фіг. 4) на передньому кінці з кріпильним елементом 23, для кріплення на лопаті 4, і з цапфою 10, для установки в підшипнику 13; із зовнішною розточкою 24 в середній частині, для наклеєння тензорезисторів 18; з центральним глухим отвором 25, для виведення проводів 19 від тензорезисторів 18; з настановним поясочком 11, для закріплення заднього кінця за допомогою втулки обтискової 15, і з буртиком 26 на задньому кінці, для установлення лопаті 4 із зазором 22; а проводи 19 від тензорезисторів 18 виводяться в порожнину корпуса 5 і підводяться до тензопідсилювача з АЦП 20, що сполучений з радіомодемом 21, сигнал від якого на частоті радіохвиль передається до приймача (не показано) (див. фіг. 5). Причому після наклеєння тензорезисторів 18 на хвостовику 9, останні покриваються лаком, а отвір 25 з проводами 19 заливається епоксидною смолою. Модель робочого колеса поворотно-лопатевої гідротурбіни складається таким чином. Перед складанням (фіг. 2, 3 і 4) хвостовик 9 (без тензорезисторів) за допомогою кріпильного елементу 23 закріплюється на досліджуваній лопаті 4 і фіксується за допомогою штифта (не позначено); поверхні цапф 8 (лопаті 4) і 10 (хвостовика 9) обробляються спільно (під підшипник 13). Заздалегідь на корпусі 5 збирається вузол досліджуваної лопаті 4: у корпусі 5 підганяється і встановлюється втулка 12; у останній встановлюється лопать 4 з хвостовиком 9, при цьому між пером лопаті 4 і втулкою 12 і корпусом 5 встановлюється прокладка завтовшки, рівною мінімальному зазору 22; у втулці 12 на поверхнях цапф 8 і 10 встановлюється підшипник 13; встановлюються: кільце настановне 14, втулка обтискова 15, кільце натискове 16 і кріпильні елементи 17. При цьому ширина втулки обтискової 15 підганяється по кільцю настановному 14 і буртику 26 на задньому кінці хвостовика 9 так, щоб забезпечити щільне притиснення лопаті 4 з прокладкою (по зазору 22) до корпусу 5. Потім вузол розбирається. Потім на хвостовику 9 виконуються операції (фіг. 4): на розточці 24 наклеюються тензорезистори 18, проводи 19 від тензорезисторів 18 заводяться в центральний отвір 25 і виводяться з останнього. Далі хвостовик 9 з наклеєними на нім тензорезисторами 18 в зборі з лопаттю 4 тарується на спеціальному пристосуванні. 53137 10 Потім перед складанням моделі окремо збирається вузол досліджуваної лопаті 4 (фіг. 2, 3 і 4): у втулці 12 встановлюється лопать 4 з тарованим хвостовиком 9; потім у втулку 12 встановлюється підшипник 13 з установленням його одночасно на цапфі 10 хвостовика 9 і на цапфі 8 лопаті 4; встановлюється кільце настановне 14, яке фіксує положення підшипника 13; тензорезистори 18 покриваються лаком; на настановний поясочок 11 хвостовика 9 встановлюється втулка обтискова 15, яка за допомогою кільця натискового 16 і кріпильних елементів 17 жорстко закріплює задній кінець хвостовика 9 і не дає йому провертатися, також фіксує положення лопаті 4 із забезпеченням зазору 22; центральний отвір 25 в хвостовику 9 з проводами 19 від тензорезисторів 18 заливається епоксидною смолою. Потім здійснюється саме складання моделі робочого колеса (фіг. 1, 2 і 3). У корпусі 5 послідовно встановлюються недосліджувані лопаті 3, які закріплюються в корпусі 5 за допомогою кріпильних елементів 7 в досліджуваному робочому положенні. Далі в корпусі 5 послідовно встановлюються досліджувані лопаті 4 у вигляді попередньо складених вузлів, причому спочатку в корпус 5 заводяться проводи 19 від тензорезисторів 18. Заздалегідь зібраний вузол втулка 12 зі встановленими в ній досліджуваною лопаттю 4 з хвостовиком 9 і настановними елементами - закріплюється на корпусі 5 в досліджуваному положенні; причому, завдяки підігнаній ширині втулки обтискової 15, встановлюється мінімальний зазор 22 між пером лопаті 4 і втулкою 12 і корпусом 5. Проводи 19 від тензорезисторів 18 під'єднуються до тензопідсилювача з АЦП20. Тензопідсилювач 20 і радіомодем 21 (у одному кожусі) встановлюються в обтічник 6, виконаний з плексигласа. Обтічник б кріпиться до корпусу 5. Потім модель 1 робочого колеса встановлюється в модельний блок з камерою 2, що виконана з плексигласа. Складання закінчено. Модель робочого колеса поворотно-лопатевої гідротурбіни при вимірюванні поворотного момента на лопаті моделі працює таким чином. Отже, досліджувана лопать 4 з тарованим хвостовиком 9 за допомогою підшипника 13, кільця настановного 14, втулки обтискової 15, кільця натискового 16 і кріпильних елементів 17 жорстко закріплюється по настановному поясочку 11 на задньому кінці хвостовика 9 у втулці 12 і, отже, в корпусі 5 в одному з досліджуваних положень. Під впливом потока води в проточній частині модельного блока, наприклад, на лопатях 4 виникають поворотні моменти, при цьому лопать 4 з цапфою 8 прагне обернутися навколо своєї осі в підшипнику кочення 13 і передає поворотний момент на передній кінець тарованого хвостовика 9, який прагне провернутися разом з лопаттю 4 в підшипнику 13 щодо нерухомої задньої частини хвостовика 9, яка жорстко затиснена втулкою обтисковою 16 по настановному поясочку 11. При цьому середня частина 24 хвостовика 9 деформується (скручується); у тензорезисторів 18, що встановлені на середній частині 24 хвостовика 11 9, змінюється опір, а в ланцюзі змінюється напруга; сигнал по проводах 19 поступає (фіг. 5) до тензопідсилювача 20, в якому аналоговий сигнал перетворюється в цифровий, який поступає в радіомодем 21, де перетворюється в радіосигнал і далі на частоті радіохвиль передається до приймача сигнала. При цьому обтічник 6 моделі 1 і камера 2 модельного блока, що виконані з плексигласа, не перешкоджають проникненню радіохвиль. Потім стенд зупиняється, модель 1 витягується з камери 2, лопаті 3 і 4 моделі встановлюються в наступне досліджуване положення, модель 1 встановлюється в камеру 2 - і процес вимірювання поворотного момента на лопатях 4 з цапфою 8 здійснюється в тому ж вказаному порядку. І так далі. 53137 12 Джерела інформації: 1. Модельные исследования гидротурбин /под ред. В.М. Малышева/. - Л.: Машиностроение. 1971. - С. 127, 137, 139, 141. - (Схема з динамометрами додається - на 3 арк.) 2. М.В. Гущин, В.Г. Макаров. Метод определения силовых характеристик рабочих колес поворотно-лопастных гидротурбин / Гидротурбостроение // Минтяжмаш, ЛМЗ. - М.-Л.: Машгиз - 1955. № 1. - С. 121-123, фіг. 1 і 2. - Прототип (копія додається -на 4 арк.). 3. 2-канальна телеметрична система CT2-Mini / Kraus Messtechnik Gmdh (КМТ). - (Копія додається - на 4 арк.). 13 Комп’ютерна верстка Д. Шеверун 53137 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюModel of water wheel of adjustable-blade propeller turbine
Автори англійськоюVeremeenko Ihor Stepanovych, Hladyshev Serhii Viktorovych, Zudochkin Ihor Stepanovych, Andriuschenko Serhii Oleksandrovych, Taraban Serhii Volodymyrovych, Shylov Valerii Pavlovych
Назва патенту російськоюМодель рабочего колеса поворотно-лопастной гидротурбины
Автори російськоюВеремеенко Игорь Степанович, Гладышев Сергей Викторович, Зудочкин Игорь Степанович, Андрющенко Сергей Александрович, Тарабан Сергей Владимирович, Шилов Валерий Павлович
МПК / Мітки
МПК: F03B 11/00
Мітки: гідротурбіни, робочого, поворотно-лопатевої, модель, колеса
Код посилання
<a href="https://ua.patents.su/7-53137-model-robochogo-kolesa-povorotno-lopatevo-gidroturbini.html" target="_blank" rel="follow" title="База патентів України">Модель робочого колеса поворотно-лопатевої гідротурбіни</a>
Машинка для спарювання робочого колеса з валом гідротурбіни
Номер патенту: 42076
Опубліковано: 25.06.2009
Автори: Веремеєнко Ігор Степанович, Колганенко Вячеслав Іванович, Першин Юрій Федорович, Міхно Микола Іванович, Рубін Борис Матвійович, Шилов Валерій Павлович
МПК: F03B 11/00
Мітки: колеса, машинка, робочого, валом, спарювання, гідротурбіни
Формула / Реферат:
Машинка для спарювання робочого колеса з валом гідротурбіни, що містить машину для спарювання, привід, сполучні і установні елементи, яка відрізняється тим, що як привід застосовується реверсивна вальцювальна машина, а для з'єднання останньої з машиною для спарювання виконуються сполучні елементи у вигляді Г-подібного кронштейна з рознімною планкою, втулки з м'якої гуми, що охоплюється рознімною планкою кронштейна, і перехідної муфти.
Лопать робочого колеса пропелерної гідротурбіни
Номер патенту: 8379
Опубліковано: 29.03.1996
Автори: Потетенко Олег Васильович, Зав'ялов Павло Сергійович, Нагорний Михайло Васильович, Швачко Володимир Костянтинович, Веремеєнко Ігор Степанович, Серебряннікова Светлана Павловна, Гольдшмідт Володимир Якович, Вапник Борис Кирилович
МПК: F03B 3/12
Мітки: лопать, колеса, пропелерної, робочого, гідротурбіни
Формула / Реферат:
Лопасть рабочего колеса пропеллерной гидротурбины с втулочным отношением, равным 0,35, отличающаяся тем, что, с целью повышения КПД и быстроходности гидротурбины, лопасть имеет параметры, описываемые следующими соотношениями: b1=9,8875`r2 - 11,1517`r + 3,5394-лопастный угол на входе, b2 = 0,6826`r2 - 1,091`r + 0,6096 -лопастный угол на выходе,`fмакс = 0,2222`r2 - 0,2944`r + 0,1017 - максимальный прогиб средней линии профиля, `dмакс =...
Робоче колесо поворотно-лопатевої гідромашини
Номер патенту: 87386
Опубліковано: 10.07.2009
Автори: Вапник Борис Кирилович, Биков Адольф Олексійович, Веремеєнко Ігор Степанович, Шилов Валерій Павлович, Гладишев Сергій Вікторович
Мітки: колесо, робоче, гідромашини, поворотно-лопатевої
Формула / Реферат:
Робоче колесо поворотно-лопатевої гідромашини, що містить втулку з певним втулковим відношенням та установлені у неї поворотні лопаті, номінальна поверхня яких виконана відповідно до певних співвідношень геометричних параметрів, яке відрізняється тим, що втулкове відношення виконано , а номінальна поверхня лопаті виконана відповідно до наступних співвідношень геометричних...
Робоче колесо поворотно-лопатевої гідромашини
Номер патенту: 88738
Опубліковано: 10.11.2009
Автори: Биков Адольф Олексійович, Гладишев Сергій Вікторович, Веремеєнко Ігор Степанович, Вапник Борис Кирилович, Шилов Валерій Павлович
МПК: F03B 3/12
Мітки: гідромашини, колесо, поворотно-лопатевої, робоче
Формула / Реферат:
Робоче колесо поворотно-лопатевої гідромашини, що містить втулку з певним втулковим відношенням та установлені у неї поворотні лопаті, номінальна поверхня яких виконана відповідно до певних співвідношень геометричних параметрів, яке відрізняється тим, що втулкове відношення виконано , кількість лопатей Zл=5, а номінальна поверхня лопаті виконана відповідно до наступних...
Робоче колесо поворотно-лопатевої гідромашини
Номер патенту: 88092
Опубліковано: 10.09.2009
Автори: Зудочкин Ігор Степанович, Веремеєнко Ігор Степанович, Соколов Валентин Геннадійович, Шилов Валерій Павлович, Гладишев Сергій Вікторович, Колганенко Вячеслав Іванович
МПК: F03B 3/06
Мітки: поворотно-лопатевої, робоче, колесо, гідромашини
Формула / Реферат:
Робоче колесо поворотно-лопатевої гідромашини, що містить корпус з днищем, сполучений з порожнистим валом зі штангами; поворотні лопаті; ущільнення лопатей; маслорозподільник зі штангами; сервомотор, сполучений за допомогою штанг з маслоприймачем, зі штоком, в якому виконаний канал; трубу, що розміщена в штангах, сполучену із каналом в штоці і направлену до маслоприймача; ущільнення по штоку між порожнинами корпусу і сервомотора з...
Попередній патент: Зубчастий варіатор
Наступний патент: Спосіб електроосадження діоксиду плюмбуму
Випадковий патент: Спосіб підготовки хворого з супутньою ішемічною хворобою серця до відеоторакоскопічної операції