Пристрій для вимірювання сил, спричинених дисбалансом ротора
Формула / Реферат
1. Пристрій для вимірювання сил, спричинених дисбалансом ротора, який містить вимірювальний вал (2), що обертається в обертовій опорі (26) навколо своєї осі (23), на який насаджений ротор (1) для виконання вимірювань і опору (3) вимірювального вала (2) з датчиками сили (4, 5) на нерухомій рамі (6), причому опора (3) містить проміжну раму (7), на яку спирається вимірювальний вал (2) у площині опори, в якій знаходиться датчик сили (4), який відрізняється тим, що проміжна рама (7) спирається на нерухому раму (6) також через другий датчик сили (5), а вимірювальний вал (2) спирається на проміжну раму (7), і проміжна рама (7) - на нерухому раму (6) також в утворених опорними важелями (11, 12, 13, 14) віртуальних точках опори (24, 25).
2. Пристрій за п. 1, який відрізняється тим, що датчики сили (4, 5) знаходяться у площинах опори поблизу жорсткої проміжної опори (7).
3. Пристрій за пп. 1-2, який відрізняється тим, що датчики сили (4, 5) знаходяться у спільній площині опори (8).
4. Пристрій за пп. 1-3, який відрізняється тим, що проміжна рама (7) спирається на нерухому раму (6), а вимірювальний вал (2) - на проміжну раму (7) таким чином, що сили, які надходять до датчиків (4, 5), лежать в одній площині й скеровуються паралельно, зокрема, співвісно одна одній.
5. Пристрій за пп. 1-4, який відрізняється тим, що віртуальні точки опори (24, 25) лежать за межами площин рівноваги (27, 28).
6. Пристрій за пп. 1-5, який відрізняється тим, що віртуальні точки опори (24, 25) у перетинах з вимірювальним валом (2) утворюють віртуальні точки вимірювання.
7. Пристрій за пп. 1-6, який відрізняється тим, що віртуальні точки опори (24, 25) проходять лінійно й перпендикулярно до осі (23) вимірювального вала.
8. Пристрій за пп. 1-7, який відрізняється тим, що вимірювальний вал (2) спирається на проміжну раму (7) також у другій площині опори (9), яка містить утворену опорними важелями (13, 14) віртуальну точку опори (24), а проміжна рама (7) спирається на нерухому раму (6) у площині опори (8), яка містить датчик (5), за допомогою паралельного керування.
9. Пристрій за пп. 1-8, який відрізняється тим, що опора (3) містить лише одну віртуальну точку опори (24).
10. Пристрій за пп. 1-9, який відрізняється тим, що єдина віртуальна точка опори (24) лежить між площинами рівноваги (27, 28).
11. Пристрій за пп. 1-9, який відрізняється тим, що єдина віртуальна точка опори (24) лежить між ротором (1) та нерухомою рамою (6).
12. Пристрій за пп. 1-7, який відрізняється тим, що з обох боків ротора (1) передбачені дві віртуальні точки опори (24, 25).
13. Пристрій за пп. 1-12, який відрізняється тим, що віртуальна точка опори (24) знаходиться посередині між площинами рівноваги (27, 28).
14. Пристрій за пп. 1-13, який відрізняється тим, що утворена першою парою опорних важелів (11, 12) віртуальна точка опори (25) лежить на продовженні вимірювального вала (2), яке знаходиться з протилежного до опори (3) вимірювального вала (2) повздовжньому напрямку вала (2).
15. Пристрій за пп. 1-14, який відрізняється тим, що точки опори (34, 25) знаходяться на перетинах продовжень кожної пари опорних важелів (11, 12 та 13, 14).
16. Пристрій за пп. 1-15, який відрізняється тим, що проміжна рама (7) спирається на нерухому раму (6) через першу пару опорних важелів (11, 12) та шарніри (15-18), вимірювальний вал (2) спирається на проміжну раму (7) через другу пару опорних важелів (13, 14) та шарніри (19-22), а осі шарнірів (15-22) по суті перпендикулярні до напрямку, в якому діють сили, що надходять від датчиків (4, 5), і осі (23) вимірювального вала (2).
17. Пристрій за п. 16, який відрізняється тим, що перша пара опорних важелів (11, 12) розташована паралельно відносно одна одної або під кутом, вершина якого лежить, по суті, на осі (23) вимірювального вала (2).
18. Пристрій за пп. 16-17, який відрізняється тим, що опорні важелі (11-14) виконані з жорстких на згин плоских деталей, які розташовані між відповідними шарнірами (15-22).
19. Пристрій за пп. 16-18, який відрізняється тим, що плоскі деталі, які утворюють опорні важелі (11-14), своїми плоскими поверхнями лежать в одних площинах з осями відповідних шарнірів (15-22).
20. Пристрій за пп. 16-19, який відрізняється тим, що опорні важелі (11-14) та шарніри (15-22) виконані як суцільна деталь, у якій шарніри (15-22) являють собою лінійні слабкі ділянки.
21. Пристрій за пп. 16-20, який відрізняється тим, що принаймні одна з віртуальних точок опори (24, 25) знаходиться з того боку осі (23) вимірювального вала (2), де розташований відповідний датчик (4, 5).
22. Пристрій за пп. 1-21, який відрізняється тим, що спирання вимірювального вала (2) на проміжну раму (7) та проміжної рами (7) на нерухому раму (6) уздовж осі вала (2) здійснюються поряд або одне за одним.
23. Пристрій за пп. 1-22, який відрізняється тим, що обертова опора (26) містить жорсткий на згин стопорний пристрій (29) уздовж осі площини опори (8), в якій знаходяться датчики (4, 5), котрий спирається через розташовану під кутом пару опорних важелів (13, 14) та шарніри (19-22) на проміжну раму (7).
24. Пристрій за пп. 1-23, який відрізняється тим, що слабкі ділянки, що утворюють шарніри (15-22), мають опуклий переріз.
25. Пристрій за пп. 1-23, який відрізняється тим, що слабкі ділянки, що утворюють шарніри (15-22), виконані у вигляді лінійних перфорацій.
Текст
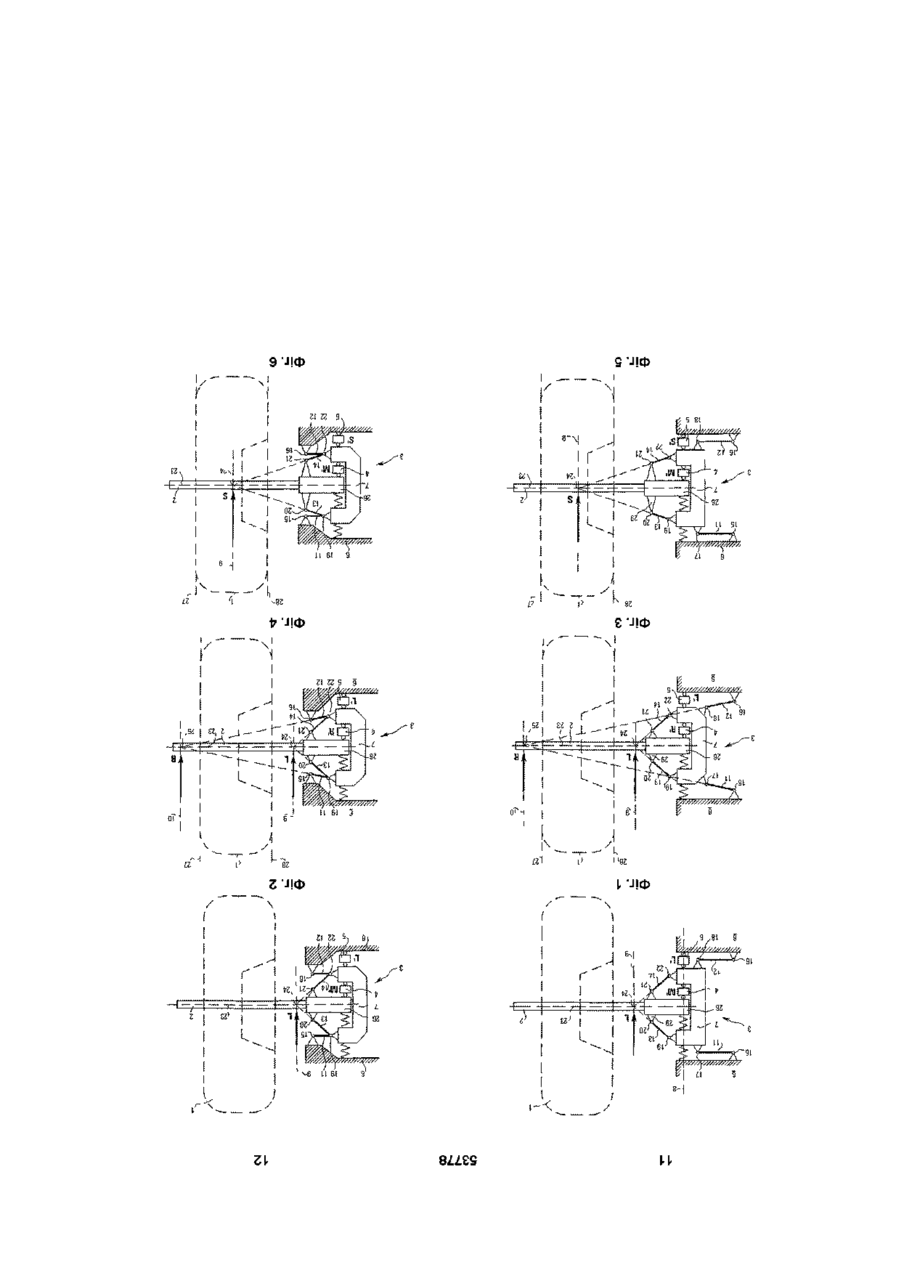
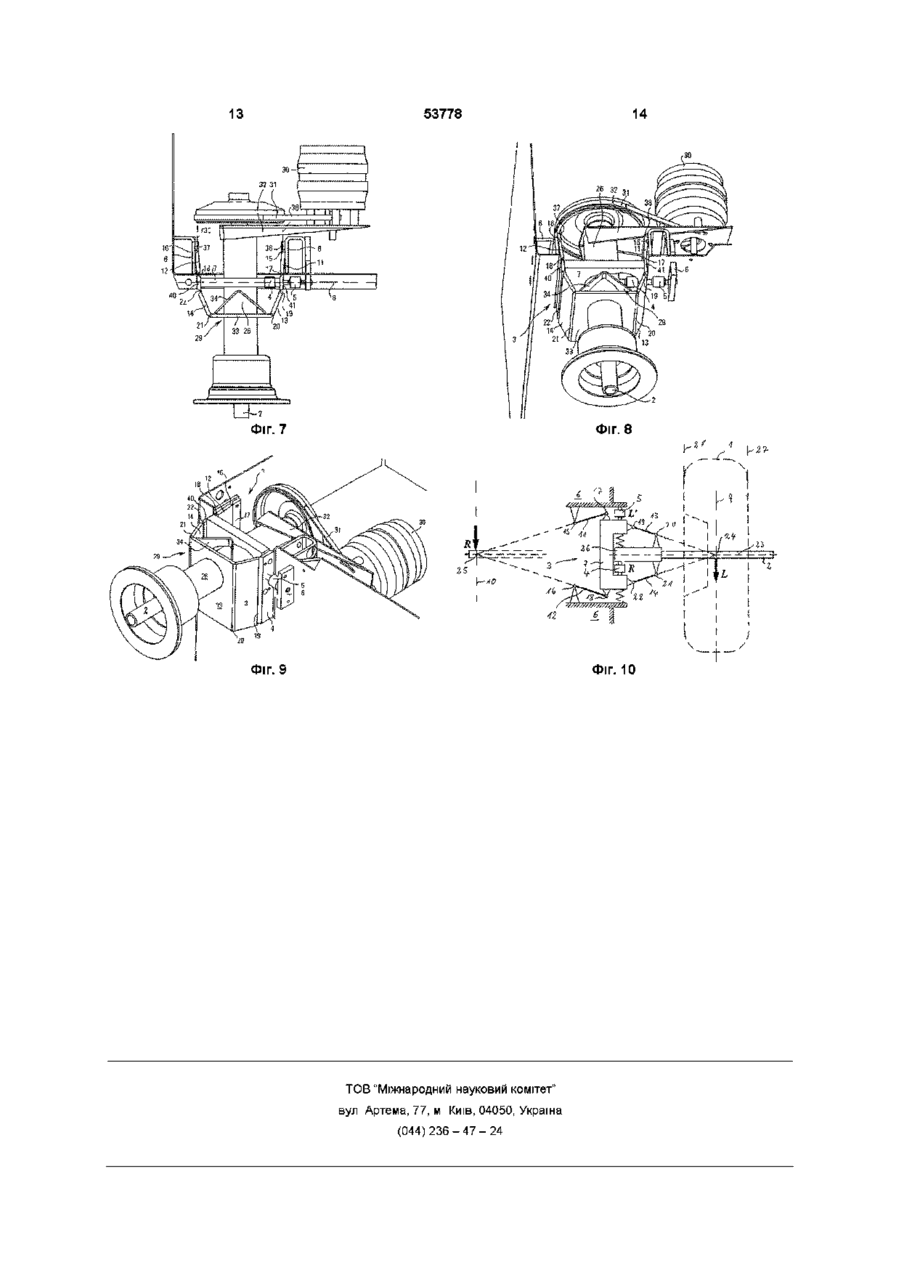
1 Пристрій для вимірювання сил, спричинених дисбалансом ротора, який містить вимірювальний вал (2), що обертається в обертовій опорі (26) навколо своєї осі (23), на який насаджений ротор (1) для виконання вимірювань і опору (3) вимірювального вала (2) з датчиками сили (4, 5) на нерухомій рамі (6), причому опора (3) містить проміжну раму (7), на яку спирається вимірювальний вал (2) у площині опори, в якій знаходиться датчик сили (4), який відрізняється тим, що проміжна рама (7) спирається на нерухому раму (6) також через другий датчик сили (5), а вимірювальний вал (2) спирається на проміжну раму (7), і проміжна рама (7) - на нерухому раму (6) також в утворених опорними важелями (11, 12, 13, 14) віртуальних точках опори (24, 25) 2 Пристрій за п 1, який відрізняється тим, що датчики сили (4, 5) знаходяться у площинах опори поблизу жорсткої проміжної опори (7) 3 Пристрій за пп 1-2, який відрізняється тим, що датчики сили (4, 5) знаходяться у СПІЛЬНІЙ ПЛОЩИНІ опори (8) 4 Пристрій за пп 1-3, який відрізняється тим, що проміжна рама (7) спирається на нерухому раму (6), а вимірювальний вал (2) - на проміжну раму (7) таким чином, що сили, які надходять до датчиків (4, 5), лежать в одній площині й скеровуються паралельно, зокрема, СПІВВІСНО одна одній 5 Пристрій за пп 1-4, який відрізняється тим, що віртуальні точки опори (24, 25) лежать за межами площин рівноваги (27, 28) 6 Пристрій за пп 1-5, який відрізняється тим, що віртуальні точки опори (24, 25) у перетинах з вимірювальним валом (2) утворюють віртуальні точки вимірювання 7 Пристрій за пп 1-6, який відрізняється тим, що віртуальні точки опори (24, 25) проходять ЛІНІЙНО Й перпендикулярно до осі (23) вимірювального вала 8 Пристрій за пп 1-7, який відрізняється тим, що вимірювальний вал (2) спирається на проміжну раму (7) також у другій площині опори (9), яка містить утворену опорними важелями (13, 14) віртуальну точку опори (24), а проміжна рама (7) спирається на нерухому раму (6) у площині опори (8), яка містить датчик (5), за допомогою паралельного керування 9 Пристрій за пп 1-8, який відрізняється тим, що опора (3) містить лише одну віртуальну точку опори (24) 10 Пристрій за пп 1-9, який відрізняється тим, що єдина віртуальна точка опори (24) лежить між площинами рівноваги (27, 28) 11 Пристрій за пп 1-9, який відрізняється тим, що єдина віртуальна точка опори (24) лежить між ротором (1) та нерухомою рамою (6) 12 Пристрій за пп 1-7, який відрізняється тим, що з обох боків ротора (1) передбачені дві віртуальні точки опори (24, 25) 13 Пристрій за пп 1-12, який відрізняється тим, що віртуальна точка опори (24) знаходиться посередині між площинами рівноваги (27, 28) 14 Пристрій за пп 1-13, який відрізняється тим, що утворена першою парою опорних важелів (11, 12) віртуальна точка опори (25) лежить на продовженні вимірювального вала (2), яке знаходиться з протилежного до опори (3) вимірювального вала (2) повздовжньому напрямку вала (2) 15 Пристрій за пп 1-14, який відрізняється тим, що точки опори (34, 25) знаходяться на перетинах продовжень кожної пари опорних важелів (11, 12 та 13, 14) 16 Пристрій за пп 1-15, який відрізняється тим, що проміжна рама (7) спирається на нерухому раму (6) через першу пару опорних важелів (11, 12) та шарніри (15-18), вимірювальний вал (2) спирається на проміжну раму (7) через другу пару опорних важелів (13, 14) та шарніри (19-22), а осі шарнірів (15-22) по суті перпендикулярні до напрямку, в якому діють сили, що надходять від дат О 00 1 со ю 53778 чиків (4, 5), і осі (23) вимірювального вала (2) 17 Пристрій за п 16, який відрізняється тим, що перша пара опорних важелів (11, 12) розташована паралельно відносно одна одної або під кутом, вершина якого лежить, по суті, на осі (23) вимірювального вала (2) 18 Пристрій за пп 16-17, який відрізняється тим, що опорні важелі (11-14) виконані з жорстких на згин плоских деталей, які розташовані між ВІДПОВІДНИМИ шарнірами (15-22) 19 Пристрій за пп 16-18, який відрізняється тим, що плоскі деталі, які утворюють опорні важелі (1114), своїми плоскими поверхнями лежать в одних площинах з осями ВІДПОВІДНИХ шарнірів (15-22) 20 Пристрій за пп 16-19, який відрізняється тим, що опорні важелі (11-14) та шарніри (15-22) виконані як суцільна деталь, у якій шарніри (15-22) являють собою ЛІНІЙНІ слабкі ділянки 21 Пристрій за пп 16-20, який відрізняється тим, що принаймні одна з віртуальних точок опори (24, 25) знаходиться з того боку осі (23) вимірювально го вала (2), де розташований ВІДПОВІДНИЙ датчик (4,5) 22 Пристрій за пп 1-21, який відрізняється тим, що спирання вимірювального вала (2) на проміжну раму (7) та проміжної рами (7) на нерухому раму (6) уздовж осі вала (2) здійснюються поряд або одне за одним 23 Пристрій за пп 1-22, який відрізняється тим, що обертова опора (26) містить жорсткий на згин стопорний пристрій (29) уздовж осі площини опори (8), в якій знаходяться датчики (4, 5), котрий спирається через розташовану під кутом пару опорних важелів (13, 14) та шарніри (19-22) на проміжну раму (7) 24 Пристрій за пп 1-23, який відрізняється тим, що слабкі ділянки, що утворюють шарніри (15-22), мають опуклий переріз 25 Пристрій за пп 1-23, який відрізняється тим, що слабкі ділянки, що утворюють шарніри (15-22), виконані у вигляді ЛІНІЙНИХ перфорацій Винахід стосується пристрою за п 1 формули, відомого з заявки Німеччини 3332978 Відомий пристрій для вимірювання сил, що утворюються при дисбалансі ротора, вимірювальний вал котрого розташований у двох рознесених уздовж осі опорах, на які обертово спирається датчик сили у порожнистому корпусі Корпус встановлено у нерухомій рамі З Європейської заявки 343265 відомий балансувальний верстат, у якому опора вимірювального валу хитно встановлена на нерухомій рамі, а датчик розташований між опорою та нерухомою рамою Також у заявці Німеччини 3330880 описано опору обертового вимірювального вала, де рознесений уздовж осі вимірювальний трансформатор спирається на нерухому раму З Європейської заявки 133229 відомий верстат для балансування автомобільних коліс, де вимірювальний вал з датчиком сили спирається на нерухому раму Для досягнення динамічної рівноваги передбачені дві опорні площини вимірювального валу, де розташовані два датчики сили У Європейській заявці 58860 описаний балансувальний верстат для тіл обертання, у якому вимірювальний вал обертово розташований у вертикально встановленій на ПІДЛОЗІ верстату плоскій коробці Опора для вимірювального валу передбачена на верху коробки Позиціювання коробки здійснює розташований в и правому куті важіль датчика, напрямки введення сил котрого проходять у вертикальній площині Таким чином один датчик сприймає статичну складову, тоді як другий визначає результуючу сил динамічного дисбалансу, утворену при обертанні вертикальної еластичне піддатливої коробки навколо осьової лінії У патенті ФРН 1698164 описано коливальну (суперкритичну) вимірювальну систему, де опора ротора складається з похило встановлених одна на одній листових пружин, продовження яких утворюють віртуальну точку перетину в площині рівноваги збалансованого ротора Обидві похилі листові пружини спираються на проміжну пластину з паралельних вертикально встановлених на опорній плиті листових пружин За допомогою віброперетворювачів створені дисбалансом ротора коливання листових пружин перетворюються на ВІДПОВІДНІ сигнали З патентів ФРН 1027427 та 1044531 відомий пристрій на пружинних стержнях або плоских пружинах, що утворюють хитні опори з шарнірами у потоншеннях у балансувальному верстаті У відомих пристроях датчики сили, розташовані у точках вимірювання у площинах опори, надсилають сигнали, пропорційні відцентровим силам, що виникають внаслідок дисбалансу ротора і спричинюють реактивні сили, які вимірюються у площинах опори або точках вимірювання У стандартних вимірювальних системах для верстатів, де здійснюється балансування автомобільних коліс, вимірювальний вал та насаджений на нього ротор звичайно утримуються у хитних опорах Перерахунок динамічного дисбалансу ротора на обидві площини рівноваги здійснюється за законом сили-важеля статики Величина сил, визначена датчиками в обох площинах опори, залежить від відстані між ротором та обома датчиками Оскільки ЦІ відстані суттєво відрізняються, в разі зміни чутливості одного з перетворювачів під різноманітними впливами (перепадів температур, ударів, перевантажень, трясіння під час перевезення, вологи та ш ) мають місце значні помилки у визначенні розрахункових збалансованих мас у ВІДПОВІДНІЙ площині В основу винаходу поставлено завдання створити пристрій на основі відомої техніки, в якому зміни чутливості одного з датчиків з вищенаведених причин мали б лише незначний вплив на визначення балансу мас у площинах рівноваги, наприклад, через визначення противаг Це завдання згідно з винаходом вирішується 53778 за допомогою ознак, наведених у п 1 формули З цією метою до вимірювального вала у ВІДПОВІДНІЙ тому чи іншому датчикові площині опори прикріплена проміжна рама, яка кріпиться до нерухомої рами над другим датчиком сили Отже, обидва датчики знаходяться у двох системах опори для визначення дисбалансу, причому кожний датчик пов'язаний з однією з систем опори Обидві системи опори розташовані між вимірювальним валом та нерухомою рамою, наприклад, балансувального верстату для виконання вимірювань дисбалансу та балансування автомобільних коліс Отже, датчики можуть розташовуватися у різних, але належних до однієї проміжної рами, площинах або у суспільній системі опори При утворенні обох зазначених систем опори передбачена принаймні одна додаткова опора вимірювального вала, яка має властивості віртуальної опори Можна також передбачити лише одну відповідну до віртуальної опори додаткову площину опори, розташовану між двома площинами рівноваги ротора або між площиною датчиків та ротором Переважно обидва датчики знаходяться у СПІЛЬНІЙ ПЛОЩИНІ опори, перпендикулярній осі вимірювального вала Датчики, що вимірюють ВХІДНІ реактивні сили, розташовані паралельно, зокрема, СПІВВІСНО один одному у СПІЛЬНІЙ площині опори Одначе датчики можуть знаходитися у зоні осьового продовження проміжної рами в різних площинах опори Оптимальний варіант здійснення винаходу полягає в тому, що вимірювальний вал спирається у ВІДПОВІДНІЙ першому датчикові площини опори та у віртуальній точці опори на проміжну раму, проміжна рама спирається у площині опори над другим датчиком на нерухому раму, а до нерухомої рами шарнірно приєднаний паралелограм керування Площини опори, що відповідають віртуальним точкам опори, можуть також утворюватися між ротором, зокрема, автомобільним колесом, та площиною опори, в якій знаходяться обидва датчики, або переважно між двома площинами рівноваги ротора, зокрема, автомобільного колеса Проміжна рама може кріпитися парою опорних важелів з шарнірами на кінцях до нерухомої рами Також і вимірювальний вал може кріпитися парою опорних важелів з шарнірами на кінцях до проміжної рами Осі КОЖНОГО шарніра перпендикулярні площині, куди надходять сили від датчиків, та осі вимірювального вала Пара опорних важелів, яка поєднує проміжну раму з нерухомою рамою, може водночас здійснювати паралельне керування проміжною рамою від нерухомої рами Для цього важелі розташовані паралельно один одному Однак можливо також розташування опорних важелів під кутом один до одного так, що вершина кута знаходиться на осі вимірювального вала або поблизу неї Шарніри опорних важелів розташовані в кутах трапеції, утвореної важелями За такої конструкції з'являються віртуальні точки опори з зовнішнього боку ротора Віртуальні точки опори вимірювального вала на проміжну раму всередині ротора, зокрема, між площинами рівноваги, можуть створюватися опорними важелями, розташованими під кутом один до одного так, що їхні шарніри знаходяться в кутах трапеції Опорні важелі виготовляються відомим чином як жорсткі на згин плоскі деталі шляхом штампування, лиття, кування та ш , разом з шарнірами, забезпечуючи передачу від датчиків сил, наприклад, у по суті лінійному та співвісному напрямку Блок опорних важелів з плоских деталей може виготовлятися як суцільний виріб, у якому плоскі деталі жорсткі на згин і лише ЛІНІЙНІ шарніри є еластичне піддатливі Шарніри можуть утворюватися у слабких точках, наприклад, звуженнях між окремими жорсткими на згин частинами Таким чином отримуються еластичне піддатливі шарнірні осі між жорсткими на згин плоскими деталями Завдяки відповідному розташуванню, паралельному чи під кутом, утворюються, як описано вище, потрібні віртуальні точки опори, які у кожній площині опори ЛІНІЙНО проходять уздовж осей опори Віртуальними точками опори є також передбачені у рамковому лічильнику балансувального верстату точки вимірювання, які являють собою віртуальні точки вимірювання Приклади На кресленнях зображені варіанти здійснення винаходу, які будуть розглянуті далі, а саме Фіг 1 - перший варіант виконання, Фіг 2 - другий варіант виконання, Фіг 3 - третій варіант виконання, Фіг 4 - четвертий варіант виконання, Фіг 5 - п'ятий варіант виконання, Фіг 6 - шостий варіант виконання, Фіг 7 - вид зверху вимірювального пристрою та опори вимірювального вала для варіантів за фіг 1, З та 5, Фіг 8 - вид спереду зверху в перспективі вимірювального пристрою за фіг 7, Фіг 9 - вид збоку зверху в перспективі вимірювального пристрою за фіг 7, Фіг 10 - сьомий варіант виконання На кресленнях схематично зображений ротор 1, який для визначення дисбалансу насаджений на вимірювальний вал 2 відомим способом через затискний засіб (не показаний) Вимірювальний вал 2 обертово встановлений у нерухомій рамі 6 Це може бути рама верстату для балансування коліс Спирання здійснюється за допомогою опори З, яка буде описана далі й яка містить датчики сили 4, 5 Опорою 3 може бути трубчаста обертова опора 26, у якій обертово встановлений вимірювальний вал 2Опору 26 з валом 2 нерухомо закріплено у першій площині опори 8 на проміжній рамі 7 над датчиком 4 Опорні важелі 13, 14 утворюють важільну пару під кутом один до одного і спрямовані до віртуальної точки опори 24 у другій площині опори 9 Точка опори 24 слугує рухомою віссю, перпендикулярною до осі 23 вимірювального валу 2 та напрямку сил, що утворюються внаслідок реактивних сил при вимірюванні дисбалансу датчиком 4 На своїх кінцях важелі 13 та 14 поєднані шарнірами 19 та 22 з проміжною рамою 7 та шарнірами 20, 21 з обертовою опорою 26 вала 2 Осі шарнірів 19-22 проходять паралельно рухомій осі, утвореній у віртуальній точці опори Віртуальна точка опори 24 може знаходитися між ротором 1 та площиною опори 8, у якій розташовані 53778 датчики 4 та 5 (фіг 1 та 2) Втім, віртуальна точка опори 24 може знаходитися також між площинами рівноваги 27 та 28, у яких здійснюється балансування, наприклад, доданням противаг (фіг 5 та 6) Проміжна рама 7 спирається на нерухому раму 6 над датчиком 5 Датчик 5 може знаходитися у площині опори 8, перпендикулярній вимірювальному валові 2 Можливо також розташувати датчик 5 в осьовому напрямку вала 2 в ІНШІЙ ПЛОЩИНІ опори Проміжна рама 7 спирається через пару опорних важелів 11 та 12 на нерухому раму 6 Опорні важелі 11,12 приєднані до нерухомої рами 6 шарнірами 15, 16, а до проміжної рами 7 - шарнірами 17, 18 (фіг 1, 3, 5, 10) та шарнірами 19, 22 (фіг 2, 4, 6) Проміжна рама 7 виконана у вигляді жорсткого опорного блоку або жорсткої на згин рами У варіантах виконання за фіг 1 - 2 та 5 - 9 опорні важелі 11, 12 по суті паралельні один одному та до осі 23 вала 2 Важелі 11 та 12 утворюють паралелограм керування, по суті перпендикулярний до осі 23 вала 2 та напрямку сил, що утворюються внаслідок визначення дисбалансу датчиком 5 У варіанті здійснення винаходу за фіг 3, 4, 10 важелі 11, 12 розташовані під гострим кутом, вершина якого лежить на осі 23 вала 2 чи поблизу неї Ця вершина утворює другу віртуальну точку опори у площині опори 10 з зовнішнього боку ротора 1, перпендикулярній до вала 2 У варіанті за фіг 10 віртуальна точка опори 25 та площина опори 10 знаходяться на показаному штрих-пунктиром подовженні вала 2, яке утворює повздовжнє продовження опори 3 вала 2 Точка опори 25 й відповідна площина 10 знаходяться з протилежного опорі 3 боку ротора 1 Віртуальна точка опори 25 також має властивості рухомої осі, перпендикулярної до осі 23 вала 2 та напрямку сил від датчиків 4 та 5 У наведених прикладах ці сили спрямовані до площини опори 8 Щоб створити властивості рухомої осі у кожній віртуальній точці опори 24, 25, осі шарнірів 1 5 - 2 2 проходять паралельно одна одній та перпендикулярно осі 23 вала 2 та напрямкові реактивних сил від датчиків 4 та 5 до площини опори 8 У варіанті за фіг 3 та 4 з обох боків ротора 1, а саме з зовнішнього та внутрішнього боків ротора, утворені площини опори 9 та 10 з віртуальними точками опори 24 та 25 Віртуальні точки опори 24 та 25 мають властивості віртуальних точок вимірювання Сили L віртуальної точки опори 24 надходять від датчика 5, а сили R віртуальної точки опори 25 - від датчика 4 Датчики надсилають ВІДПОВІДНІ сигнали L' та R' Оскільки віртуальні точки опори 24 та 25 являють собою також віртуальні точки вимірювання, тож при появі спричинених дисбалансом ротора відцентрових сил у ЛІВІЙ ПЛОЩИНІ опори датчик 5 показує більшу з цих сил, пропорційну сигналові L', а на датчику 4 сигнал не з'являється Коли у правій площині опори 10 з'являється спричинена дисбалансом ротора відцентрова сила R, лише датчик 4 надсилає пропорційний сигнал R', тоді як датчик 5 нічого не сигналізує Таким чином утворюється хитна опора, за допомогою якої виникають площини рівноваги 27 та 28 на роторі й між віртуальними точками вимірювання 8 або віртуальними площинами вимірювання, котрі збігаються з віртуальними площинами опори 9 та 10, як показано на фіг 3 та 4 Під дією спричинених дисбалансом ротора сил між площинами опори 9 та 10 у цих площинах (віртуальних площинах вимірювання) утворюються опорні сили ВІДПОВІДНО до відстані між точками опори та надходять ВІДПОВІДНІ сигнали вимірювання від датчиків 4 та 5 У варіантах виконання за фіг 1 і 2 та 5 - 9 віртуальні точки опори знаходяться на безкінечній або відносно великій відстані, наприклад, від 3 до 20 м І більше, а опорні важелі 11 та 12 діють паралельно на проміжну раму 7 У цих варіантах, якщо у площині опори 9 (віртуальній площині вимірювання) у віртуальній точці опору (віртуальній точці вимірювання) з'являється спричинена дисбалансом ротора відцентрова сила (L на фіг 1 та 2, S на фіг 5 та 6), ця сила потрапляє лише на датчик 5, який надсилає пропорційний їй сигнал L' або S' На датчику 4 сигналу немає Незалежно від відстані до місця введення відцентрової сили датчик 5, керований паралельно від проміжної рами 7, надає сигнал, пропорційний лише величині відцентрової сили Датчик 4, навпаки, надсилає сигнал М', пропорційний не тільки величині відцентрової сили, а відтак величині дисбалансу, але також і відстані від точки введення сили до площини опори 9 або віртуальної точки опори 24 У варіантах виконання за фіг1, 3, 5 та 10, а також фіг 7 - 9, проміжна рама 7 спирається на нерухому раму 6 за допомогою пари опорних важелів 11 та 12, а на трубчасту опору 26 вала 2 за допомогою пари опорних важелів 13 та 14 у напрямку осі вала 2 Пари важелів у варіантах за фіг 3 та 4 нахилені в одному напрямку У варіанті за фіг 5 та 10 напрямок нахилу важелів 11,12 протилежний напрямкові нахилу пари важелів 13, 14 У варіантах виконання за фіг 2, 4 та 6 проміжна рама 7 спирається на нерухому раму 6, а трубчаста опора 26 вимірювального вала 2 на проміжну опору 7 за допомогою ВІДПОВІДНИХ пар опорних важелів 11, 12 та 13, 14, які знаходяться поряд або одна над одною Завдяки цьому шарніри 17, 19 та 18, 22 взаємодіють з ВІДПОВІДНИМИ шарнірами 19, 21 на проміжній рамі 7, як показано на фіг 2, 4 та 6 Опорні важелі 1 1 - 1 4 можуть являти собою жорсткі на згин плоскі деталі, їх можна штампувати суцільними, виконуючи шарніри у слабких точках, наприклад, у вигляді звужень Як видно на фіг 7 9, плоска деталь, з якої виготовлені опорні важелі 11 - 14, має також стопорну пластину 33, що становить частину стопорного пристрою 29 Стопорна пластина 33 міцно прикріплена, наприклад, приварена, до трубчастої опори 26 Додатковим елементом стопорного пристрою 29 є також упорний кутик 34, приварений до стопорної пластини 33 та трубчастої опори 26 На кресленнях показаний верхній упорний кутик 34 Можна також передбачити нижній упорний кутик Верхній та нижній упорні кутики 34 можуть бути виконані як суцільна деталь, до якої вставляється крізь отвір та приварюється трубчаста опора 26 Таким чином утворюється жорстке на згин з'єднання стопорного пристрою 29 з трубчастою опорою 26 між шарнірами 20 та 21 Шарніри 20 та 21 знаходяться між опорними важелями 13 і 14 та стопорною пластиною 53778 10 спирається на нерухому раму 6 через компактну опору 3 Завдяки цьому зменшується вплив динаЗ того ж листа, що й опорні важелі 11-14, можмічних сил, зокрема, від хитної опори вала 2, що на виготовити також кріпильні пластини 37, 38 та дає змогу скоротити помилки, спричинені змінами 40, 41 Кріпильні пластини жорстко, наприклад, на чутливості датчиків сили внаслідок перепадів темболтах або іншим чином, з'єднані з нерухомою ператур, ударів, перевантажень, трясіння під час рамою 6 Вони здійснюють прикріплення опорних перевезення, вологи й т ш , рідше доводиться важелів 11 та 12, за допомогою яких проміжна замінювати датчики, юстувати вимірювальний рама 7 спирається на нерухому раму 6 Між кріпипристрій після перевезення та монтажу верстату, льними пластинами 37 та 38 та плоскими деталязнижуються витрати на обслуговування, підвищуми, що утворюють опорні важелі 11 та 12, знахоється готовність до вимірювань, зменшуються видяться слабкі ділянки або звуження, які являють моги до роздільності аналого-цифрових перетвособою шарніри 15 та 16 Слабкі ділянки мають рювачів при переведенні аналогових сигналів опуклий, зокрема напівкруглий, переріз датчиків до цифрової форми, збільшуються віртуВиконані суцільно кріпильні пластини 40 та 41 альні розміри площин вимірювання, незважаючи жорстко прикріплені, наприклад, на болтах або на компактну конструкцію Горизонтальна опора зварюванням, до бокових поверхонь проміжної вала дозволяє знизити динаміку сил завдяки вларами 7 Між кріпильними пластинами 37 і 38 та штуванню двох точок опори з обох боків ротора важелями 11, 12 знаходяться слабкі ділянки або Список означень звуження, що утворюють шарніри 17 та 18 Між 33 плоскими деталями, які являють собою опорні важелі 13 та 14, розташовані слабкі ділянки або звуження, що утворюють шарніри 19 та 22 Таким чином, з одного листа металу створюється практично вся опора 3, за допомогою якої вимірювальний вал 2 кріпиться до нерухомої рами 6 І яка утворює віртуальні точки опори та точки вимірювання Паралельне спрямовування проміжної рами 7 до нерухомої рами 6 здійснюється по суті тим, що опуклі звуження 15, 17 та 16, 18 з обох боків опорних важелів 11 та 12 лежать у паралельних площинах 35 та 36, забезпечуючи керування за допомогою важелів 11 та 12 Звуження 15, 17 та 16, 18 знаходяться у протилежних площинах, утворених плоскими важелями 11 та 12 Опорні важелі 11 та 12 своїми крайніми вершинами утворюють кут, завдяки чому, як пояснювалося вище, здійснюється паралельне керування у паралельних площинах 35 та 36 Таким чином одержуються вимірювальні пристрої за фіг 1 та 5 Щоб одержати вимірювальний пристрій за фіг 3, можна нахилити важелі 11 та 12 під ВІДПОВІДНО збільшеним кутом Для здійснення варіанту виконання за фіг 10 задні КІНЦІ важелів 11, 12 (фіг 7 - 9) спрямовані назустріч один одному Задні звуження або шарніри 15, 16 знаходяться ближче до осі вимірювального вала 2, ніж передні звуження або шарніри 17, 18 Як видно на фіг 8, обидва датчики 4, 5 розташовані на одній лінії, завдяки чому датчик 4 знаходиться між обертовою опорою 26 та внутрішнім боком проміжної рами 7, а датчик 5 - між ЗОВНІШНІМ боком проміжної рами 7 або кріпильною пластиною 41 та нерухомою рамою 6 Вимірювальний вал 2 приводиться від електродвигуна ЗО через привідний пас 31 Двигун ЗО спирається на обертову опору 26 через консоль 32 Завдяки такій опорі на результати вимірювань не впливають перешкоди від роботи приводу В осьовому напрямку вимірювальний вал 2 1 ротор, 2 вимірювальний вал, 3 опора, 4 датчик сили, 5 датчик сили, 6 нерухома рама, 7 проміжна рама, 8 площина опори, 9 площина опори, 10 площина опори, 11 опорний важіль, 12 опорний важіль, 13 опорний важіль, 14 опорний важіль, 15 шарнір, 16 шарнір, 17 шарнір, 18 шарнір, 19 шарнір, 20 шарнір, 21 шарнір, 22 шарнір, 23 вісь вимірювального вала, 24 віртуальна точка опори, 25 віртуальна точка опори, 26 обертова опора, 27 площина рівноваги, 28 площина рівноваги, 29 стопорний пристрій, 30 електродвигун, 31 привідний пас, 32 консоль, 33 стопорна пластина, 34 упорний кутик, 35 паралельна площина, 36 паралельна площина, 37 кріпильна пластина, 38 кріпильна пластина, 39 кріпильна пластина, 40 кріпильна пластина, 41 кріпильна пластина 9-НФ 9-НФ Є-ІІФ 1 -ІІФ !•!• 13 53778 14 Фіг. 7 Фіг. 9 Фіг. 10 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for measuring forces generated by imbalance of a rotor
Назва патенту російськоюУстройство для измерения усилий, вызванных неуравновешенностью вращающегося элемента
МПК / Мітки
Мітки: сіль, спричинених, вимірювання, дисбалансом, пристрій, ротора
Код посилання
<a href="https://ua.patents.su/7-53778-pristrijj-dlya-vimiryuvannya-sil-sprichinenikh-disbalansom-rotora.html" target="_blank" rel="follow" title="База патентів України">Пристрій для вимірювання сил, спричинених дисбалансом ротора</a>
Пристрій для вимірювання вібропереміщень ротора
Номер патенту: 355
Опубліковано: 30.04.1993
Автори: Іванов Сергій Григорович, Мирошниченко Микола Васильович, Квашин Михайло Федорович, Красюк Володимир Якович, Серга Валерій Борисович, Барков Олександр Степанович
МПК: H03B 1/00, G01H 1/00, G01M 1/22
Мітки: пристрій, вібропереміщень, ротора, вимірювання
Формула / Реферат:
(57) Изобретение относится к теплоэнергетике и может быть использовано для измерения виброперемещений роторов преимущественно паровых турбоагрегатов в процессе их пуска и эксплуатации. Цель изобретения - повышение точности измерения виброперемещений ротора за счет исключения влияния помех от дефектов поверхности ротора. Устройство содержит два бесконтактных измерительных преобразователя, установленных вблизи ротора соосно и диаметрально...
Пристрій для вимірювання параметрів обертання ротора електродвигуна
Номер патенту: 16801
Опубліковано: 29.08.1997
Автори: Загоруйко Валерій Тимофійович, Дубровський Володимир Васильович, Панченко Костянтин Євгенович
МПК: E21B 45/00
Мітки: електродвигуна, ротора, пристрій, обертання, параметрів, вимірювання
Формула / Реферат:
Устройство для измерения параметров вращения ротора электродвигателя, содержащее два трансформатора напряжения, три фильтра, звено фазовой коррекции, фазовый детектор, умножитель, делитель и датчик механической скорости проходки, а также генератор высокой частоты и возбудитель, выходы которых соединены с соответствующими входами сумматора, выход сумматора соединен с обмоткой возбуждения синхронного электродвигателя, отличающееся тем, что,...
Пристрій для змащування та охолодження підшипника опори ротора газотурбінного двигуна
Номер патенту: 16647
Опубліковано: 29.08.1997
Автори: Колотиленко Михайло Георгійович, Єфименко Анатолій Васильович
МПК: F02C 7/06
Мітки: двигуна, ротора, підшипника, пристрій, охолодження, змащування, газотурбінного, опори
Формула / Реферат:
Устройство для смазки и охлаждения подшипника опоры ротора газотурбинного двигателя, содержащее форсунку подачи масла и выполненные в полом валу радиальные каналы для подачи масла от форсунки к подшипнику, отличающееся тем, что, с целью повышения надежности работы, форсунка установлена в полости вала, расположена эксцентрично относительно оси его вращения и ориентирована вертикально вверх.
Куля з набуваємим динамічним дисбалансом
Номер патенту: 22553
Опубліковано: 17.03.1998
Автор: Киргетов Юрій Павлович
МПК: F42B 10/00
Мітки: набуваємим, куля, дисбалансом, динамічним
Формула / Реферат:
1. Пуля с приобретаемым динамическим дисбалансом, состоящая из оболочки, рубашки и сердечника, отличающаяся тем, что, с целью повышения убойного и останавливающего действия она снабжена разделяющимся сердечником, части которого являются половинами цилиндра, разрезанного по осевой плоскости с остатками оснований на одном из концов обеих частей, размещенными в полости рубашки таким образом, что одна из них установлена неподвижно и остаток...
Пристрій для вимірювання напруженості імпульсного електричного поля
Номер патенту: 33220
Опубліковано: 15.02.2001
Автори: Гладков Володимир Миколайович, Мелентьєв Максим Вікторович, Бреславець Віталій Сергійович, Вершков Олександр Юрійович, Серков Олександр Анатолійович, Неймирок Юлія Сергіївна
МПК: H03K 5/00, G01R 29/12
Мітки: імпульсного, напруженості, пристрій, вимірювання, поля, електричного
Текст:
...імпульса електричного поля; - швидкість поширення сигнала уздовж оболонки вимірювального кабеля та провідної площини. ф|Г. На наведено пристрій для вимірювання напруженості імпульсного електричного поля. Пристрій містить вимірювальний перетворювач 1, з'єднаний з блоком индикації 2, розташованим в екранованому приміщенні 3, за допомогою вимірювального кабеля 4 з розташованими на ньому феритовими кільцями 5. Екрановане приміщення 3...
Попередній патент: Спосіб одержання неперервного волокна із розплаву базальтових гірських порід
Наступний патент: Система калібрування валків безперервного сортового стана
Випадковий патент: Комплект додаткових дощок до кришки столу