Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарата
Формула / Реферат
Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів літального апарата (ЛА), який полягає у тому, що на передавальному боці лазерної інформаційно-вимірювальної системи (ЛІВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера виділяють необхідні пари частот для створення рівносигнального напрямку у вигляді чотирьох, які частково перетинаються, парціальних діаграм спрямованості (ДС), "підфарбованих" різницевими частотами міжмодових биттів ![]()
![]()
![]()
![]() які попарно зустрічно сканують у кожній із двох ортогональних площин з заданим кутом відхилення у кожній із двох ортогональних площин, що приводить на приймальному боці ЛІВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування, це зрушення дає похибки супроводження ЛА по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей, зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин вимірює з високою точністю похилу дальність до ЛА по запізнюванню частот міжмодових биттів, де для боротьби з неоднозначністю вимірювань використовують багатошкальний метод вимірювання, а також його радіальну швидкість доплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС, який відрізняється тим, що додатково використовують несучі частоти
які попарно зустрічно сканують у кожній із двох ортогональних площин з заданим кутом відхилення у кожній із двох ортогональних площин, що приводить на приймальному боці ЛІВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування, це зрушення дає похибки супроводження ЛА по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей, зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин вимірює з високою точністю похилу дальність до ЛА по запізнюванню частот міжмодових биттів, де для боротьби з неоднозначністю вимірювань використовують багатошкальний метод вимірювання, а також його радіальну швидкість доплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС, який відрізняється тим, що додатково використовують несучі частоти ![]() для формування багатоканального (N) інформаційного зв'язку з ЛА і створення лазерного сигналу із просторовою модуляцією поляризації для його розпізнавання та здійснюють сканування сумарною ДС лазерного випромінювання у заданій зоні із заданим законом сканування для пошуку ЛА.
для формування багатоканального (N) інформаційного зв'язку з ЛА і створення лазерного сигналу із просторовою модуляцією поляризації для його розпізнавання та здійснюють сканування сумарною ДС лазерного випромінювання у заданій зоні із заданим законом сканування для пошуку ЛА.
Текст
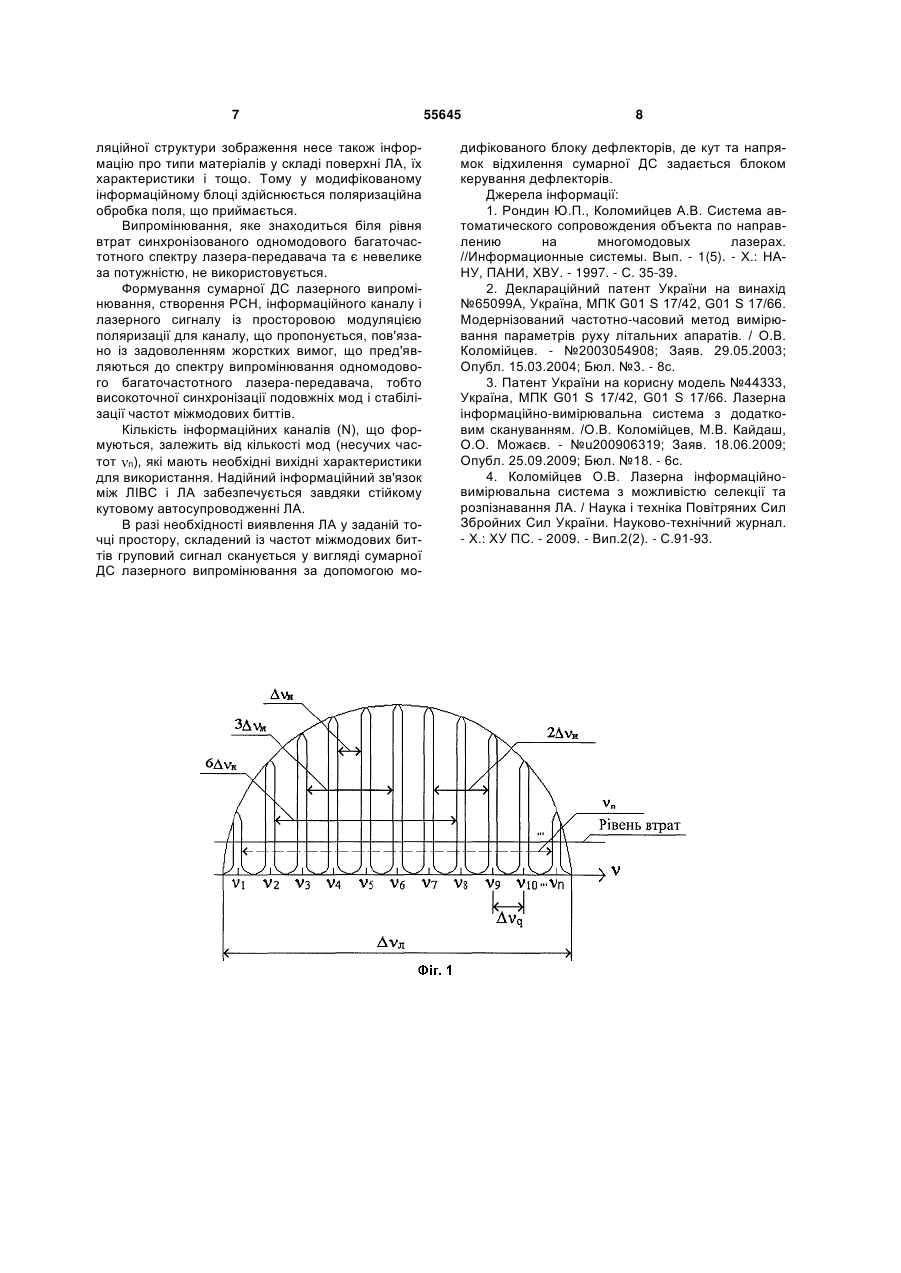
Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів літального апарата (ЛА), який полягає у тому, що на передавальному боці лазерної інформаційно-вимірювальної системи (ЛІВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера виділяють необхідні пари частот для створення рівносигнального напрямку у вигляді чотирьох, які частково перетинаються, парціальних діаграм спрямованості (ДС), "підфарбованих" різницевими частотами міжмодових биттів , 2 м, 54 5 4 м 97 9 7 2 (19) 1 3 55645 частково перетинаються, парціальних ДС, «підфарбованих» різницевими частотами міжродових биттів 54 5 4 м, 97 9 7 2 м, 63 6 3 3 м, 82 8 2 6 м , які попарно зустрічно сканують у кожній із двох ортогональних площин з заданим кутом відхилення у кожній із двох ортогональних площин, що приводить на приймальному боці ЛВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. Зрушення дає похибки супроводження ЛА по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин дозволяє також вимірювати з високою точністю похилу дальність до ЛА по запізнюванню частот міжмодових биттів, де для боротьби з неоднозначністю вимірювань використовується багатошкальний метод вимірювання, а також його радіальну швидкість доплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС. Недоліком методу-прототипу є те, що він не здійснює пошук і розпізнавання ЛА та не використовує несучі частоти (моди) для здійснення інформаційного зв'язку з ним. В основу корисної моделі поставлена задача створити модернізований частотно-часовий метод, який забезпечить пошук у заданій зоні і розпізнавання ЛА, та при одночасному його стійкому кутовому автосупроводженні, вимірювання шести параметрів руху: кутів азимута і міста , похилої дальності R, радіальної R' та кутової ' і ' (тангенціальної U ) складових швидкості в широкому діапазоні дальностей, починаючи з початкового моменту його польоту, а також багатоканальний (N) інформаційний зв'язок з ЛА на несучих частотах (модах) [3, 4]. Поставлена задача вирішується за рахунок того, що у відомому методі-прототипі [2], на передавальному боці ЛІВС із синхронізованого спектра випромінювання одномодового багаточастотного лазера виділяються необхідні пари частот для створення рівносигнального напрямку у вигляді 4х, які частково перетинаються, парціальних ДС, «підфарбованих» різницевими частотами міжмодових биттів 54 5 4 м, 97 9 7 2 м, м, 63 6 3 3 м, які попарно зустрічно 82 8 2 6 сканують у кожній із двох ортогональних площин з заданим кутом відхилення у кожній із двох ортогональних площин, що приводить на приймальному боці ЛІВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. Зрушення дає похибки супроводження ЛА по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин вимірює з високою точністю похилу дальність до ЛА по запізнюванню 4 частот міжмодових биттів, де для боротьби з неоднозначністю вимірювань використовується багатошкальний метод вимірювання, а також його радіальну швидкість доплерівським методом, оскільки найкращий режим сканування забезпечується при напівперекритті ДС. Додатково використовуються несучі частоти n для формування багатоканального (N) інформаційного зв'язку з ЛА і створення лазерного сигналу із просторовою модуляцією поляризації для його розпізнавання та здійснюється сканування сумарною ДС лазерного випромінювання у заданій зоні із заданим законом сканування для пошуку ЛА. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає в побудові каналів: АСН з вимірюванням кутів азимута і міста , похилої дальності R, радіальної R' та кутових ' і ' швидкостей (тангенціальної U ) ЛІВС та пошуку ЛА, розпізнаванні і, при одночасному його кутовому автосупроводженні, здійсненні високоточного вимірювання шести параметрів руху і багатоканального (N) інформаційного зв'язку з ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту. На Фіг.1 приведено виділення із синхронізованого одномодового багаточастотного лазерного випромінювання необхідних частот для отримання частот міжмодових биттів і лазерних сигналів із просторовою модуляцією поляризації. На Фіг.2 приведено створення рівносигнального напрямку та сканування сумарною ДС у невеликому куті і окремо 4-мя діаграмами спрямованості в Ортогональних площинах при використанні частот міжмодових биттів синхронізованого одномодового багаточастотного лазерного випромінювання. На Фіг.3 приведено створення лазерного сигналу із просторовою модуляцією поляризації. На Фіг.4 приведено попарне зустрічносканування діаграм спрямованості у кожній з двох ортогональних площин. На Фіг.5 приведено зрушення ДС і ЛА, де: а) рух ДС і ЛА співпадає, б) рух ДС і ЛА неспівпадає. На Фіг.6 приведено зрушення обгинальних періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. На Фіг.7 приведено зрушення обгинальних півперіодів пачок імпульсів частот міжмодових биттів за один прохід ДС у одному напрямку сканування. На Фіг.8 приведені епюри напруг з виходів блоків вимірювання похилої дальності до ЛА, де: а) від блоку опорного сигналу; б) від блоку відбитого сигналу. Суть модернізованого частотно-часового методу, полягає в тому, що на передаючому боці лазерної інформаційно-вимірювальної системи із синхронізованого спектра випромінювання одномодового багаточастотного лазера виділяються необхідні пари частот для створення рівносигнального напрямку у вигляді 4-х, які частково перетинаються, парціальних діаграм спрямованості, «підфарбованих» різницевими частотами міжмо 5 дових 55645 биттів 97 9 7 2 54 м, м, 5 м, м, 4 63 6 3 3 які попарно зустрічно 82 8 2 6 сканують у кожній із двох ортогональних площин. Зустрічне сканування пар парціальних ДС здійснюється з заданим кутом відхилення у кожній із двох ортогональних площин і приводить на приймальному боці ЛІВС до зрушення обгинальних періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. Зрушення дає похибки супроводження літального апарату по кутах, а різниця в тривалості обгинальних (півперіодів) дає похибки кутових швидкостей. Завдяки зустрічному скануванню ДС з високою точністю вимірюється похила дальність до ЛА по запізнюванню частот міжмодових биттів, з використанням багатошкального методу вимірювання, а також його радіальної швидкості доплерівським методом. Використовуються несучі частоти n для формування багатоканального (N) інформаційного зв'язку з ЛА і створення лазерного сигналу із просторовою модуляцією поляризації для його розпізнавання. Здійснюється сканування сумарною ДС лазерного випромінювання у заданій зоні із заданим законом сканування для пошуку ЛА. На передавальному боці ЛІВС. Із синхронізованого одномодового багаточастотного спектра випромінювання YAG:Nd3+ - лазера (або лазера з кращими характеристиками) за допомогою модифікованого селектора подовжніх мод (МСПМ) виділяються необхідні моди (частоти) для створення: - лазерних сигналів із просторовою модуляцією поляризації для розпізнання (селекції) та N інформаційних каналів зв'язку з ЛА, за умови використання сигналів на несучих частотах n; - рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки 4-х, які частково перетинаються, парціальних ДС, за умови використання комбінацій частот («підкрашених» різницевими частотами міжмодових биттів) 54 5 4 м, 97 9 7 2 м, 63 6 3 3 м, 82 8 2 6 м. При цьому кількість мод (частот і їх комбінацій) може знаходитися в рамках МСПМ, що виділяються, стосовно рівня втрат (Фіг.1). Груповий сигнал, який складений із несучих частот n, минаючи модифікований блок дефлекторів (МБД), потрапляє на передавальну оптику (ПРДО), де змішується (модулюється) з інформаційним сигналом від модифікованого інформаційного блоку (МІБ) та формує багатоканальний (N) інформаційний сигнал, що передається на ЛА (взаємозв'язок) (Фіг.1, 2). Також, за допомогою МСПМ та МІБ створюється лазерний сигнал із просторовою модуляцією поляризації шляхом розведення лазерного випромінювання (несучої частоти) на два променя з поворотом плоскості поляризації на кут 90° в одному з них (Фіг.3). При цьому випромінювання апертури першого і другого каналів в апертурної плоскості U0V рознесені на відстані . Різність ходу пучків до 6 картинної плоскості ЛА Х0У змінюється вдовж осі Х від точки до точки. Обумовлена цим різність фаз між поляризованими компонентами, що ортогональні, поля у картинної плоскості також змінюється від точки до точки. В залежності від різності фаз у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної до початкової і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами та відстанню до картинної плоскості. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції, дорівнює значенню ступеня поляризації випромінювання, що відбито, в даній ділянці поверхні ЛА. Використання МБД забезпечує: попарне зустрічне сканування 4-мя парціальними ДС у кожній із двох ортогональних площин з періодом сканування півперіоди ДС та сканування сумарною ДС лазерного випромінювання у заданій зоні із заданим законом сканування. Оскільки здійснюється зустрічне сканування двома парами ДС у кожній із двох ортогональних площин і (X і У), то інформаційний сигнал і лазерні сигнали із просторовою модуляцією поляризації на несучих частотах n - проходять вдовж РСН (Фіг.2). На приймальному блоці ЛІВС. Прийняті відбиті від ЛА інформаційні та, в процесі сканування 4-х ДС, вимірювальні лазерні імпульсні сигнали і обгинаючі сигнали ДС перетворюються в електричні імпульсні сигнали на несучих частотах та різницевих частотах міжмодових биттів. Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин (Фіг.2, 4), забезпечує: - порівняння зрушень періодів пачок імпульсів, що обгинають, частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування. Це дає можливість по різниці зрушень періодів, що обгинають, сформувати сигнали помилки по двох осях координат і визначити кути азимута і місця , а також величину і знак кута відхилення ЛА від рівно-сигнального напрямку (Фіг.6); - порівняння зрушень напівперіодів (тривалостей) пачок імпульсів, що обгинають, частот міжмодових биттів за один прохід ДС в одному напрямку сканування. Це дає можливість по різниці тривалостей, що обгинають, (напівперіодів) визначити кутову і тангенціальну складові швидкості ЛА (Фіг.5, 7); - вимірювання похилої дальності до ЛА по запізнюванню частоти міжмодових биттів (Фіг.8); - вимірювання радіальної складової швидкості допплерівським методом. При відбитті лазерного сигналу із просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюється амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту моду 7 ляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо. Тому у модифікованому інформаційному блоці здійснюється поляризаційна обробка поля, що приймається. Випромінювання, яке знаходиться біля рівня втрат синхронізованого одномодового багаточастотного спектру лазера-передавача та є невелике за потужністю, не використовується. Формування сумарної ДС лазерного випромінювання, створення РСН, інформаційного каналу і лазерного сигналу із просторовою модуляцією поляризації для каналу, що пропонується, пов'язано із задоволенням жорстких вимог, що пред'являються до спектру випромінювання одномодового багаточастотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. Кількість інформаційних каналів (N), що формуються, залежить від кількості мод (несучих частот n), які мають необхідні вихідні характеристики для використання. Надійний інформаційний зв'язок між ЛІВС і ЛА забезпечується завдяки стійкому кутовому автосупроводженні ЛА. В разі необхідності виявлення ЛА у заданій точці простору, складений із частот міжмодових биттів груповий сигнал сканується у вигляді сумарної ДС лазерного випромінювання за допомогою мо 55645 8 дифікованого блоку дефлекторів, де кут та напрямок відхилення сумарної ДС задається блоком керування дефлекторів. Джерела інформації: 1. Рондин Ю.П., Коломийцев А.В. Система автоматического сопровождения объекта по направлению на многомодовых лазерах. //Информационные системы. Вып. - 1(5). - X.: НАНУ, ПАНИ, ХВУ. - 1997. - С. 35-39. 2. Деклараційний патент України на винахід №65099А, Україна, МПК G01 S 17/42, G01 S 17/66. Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів. / О.В. Коломійцев. - №2003054908; Заяв. 29.05.2003; Опубл. 15.03.2004; Бюл. №3. - 8с. 3. Патент України на корисну модель №44333, Україна, МПК G01 S 17/42, G01 S 17/66. Лазерна інформаційно-вимірювальна система з додатковим скануванням. /О.В. Коломійцев, М.В. Кайдаш, О.О. Можаєв. - №u200906319; Заяв. 18.06.2009; Опубл. 25.09.2009; Бюл. №18. - 6с. 4. Коломійцев О.В. Лазерна інформаційновимірювальна система з можливістю селекції та розпізнавання ЛА. / Наука і техніка Повітряних Сил Збройних Сил України. Науково-технічний журнал. - X.: ХУ ПС. - 2009. - Вип.2(2). - С.91-93. 9 55645 10 11 55645 12 13 Комп’ютерна верстка М. Ломалова 55645 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюTime-and-frequency method for search, identification and measurement of parameters of motion of an aircraft
Автори англійськоюKolomiitsev Oleksii Volodymyrovych
Назва патенту російськоюЧастотно-временной метод поиска, распознавания и измерения параметров движения летательного аппарата
Автори російськоюКоломийцев Алексей Владимирович
МПК / Мітки
МПК: G01S 17/42, G01S 17/66
Мітки: розпізнавання, вимірювання, параметрів, частотно-часовий, пошуку, руху, літального, апарата, метод
Код посилання
<a href="https://ua.patents.su/7-55645-chastotno-chasovijj-metod-poshuku-rozpiznavannya-ta-vimiryuvannya-parametriv-rukhu-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарата</a>
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів
Номер патенту: 65099
Опубліковано: 15.03.2004
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: руху, апаратів, літальних, модернізований, вимірювання, параметрів, метод, частотно-часовий
Формула / Реферат:
Модернізований частотно-часовий метод вимірювання параметрів руху літальних апаратів, який полягає у тому, що на передавальному боці шестипараметрійної лазерної вимірювальної системи (ЛВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяють необхідні пари частот для створення рівносигнального напрямку (РСН) у вигляді 4-х, які частково перетинаються, парціальних...
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ла
Номер патенту: 55508
Опубліковано: 10.12.2010
Автори: Копилов Олександр Олексійович, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Приходько Дмитро Петрович, Можаєв Олександр Олександрович, Злотніков Андрій Львович, Хударковський Костянтин Ігорович, Альошин Геннадій Васильович, Приходько Володимир Мусійович, Васильєв Дмитро Геннадійович
МПК: G01S 17/42, G01S 17/66
Мітки: биттів, міжмодових, вимірювання, використанням, швидкостей, канал, можливістю, розпізнавання, кутових, апаратів, літальних, частот
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод з багаточастотним розділенням каналів, блок дефлекторів, передавальну оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових...
Канал вимірювання радіальної швидкості літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ла
Номер патенту: 55503
Опубліковано: 10.12.2010
Автори: Хударковський Костянтин Ігорович, Коломійцев Олексій Володимирович, Приходько Володимир Мусійович, Злотніков Андрій Львович, Васильєв Дмитро Геннадійович, Альошин Геннадій Васильович, Можаєв Олександр Олександрович, Сачук Ігор Іванович, Приходько Дмитро Петрович, Копилов Олександр Олексійович
МПК: G01S 17/42, G01S 17/66
Мітки: радіальної, канал, розпізнавання, частот, вимірювання, биттів, літальних, швидкості, використанням, можливістю, апаратів, міжмодових
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з використанням частот міжмодових биттів та можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), селектор подовжніх мод з багаточастотним розділенням каналів (СПМБРК), блок дефлекторів, передавальну оптику, приймаючу оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти...
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ла
Номер патенту: 51059
Опубліковано: 25.06.2010
Автори: Сідченко Сергій Олександрович, Пашков Дмитро Павлович, Рисований Олександр Миколайович, Клівець Сергій Іванович, Макаров Сергій Анатолійович, Висоцький Олег Володимирович, Васильєв Дмитро Геннадійович, Коломійцев Олексій Володимирович, Болюбаш Олексій Олексійович, Воробйов Руслан Володимирович
МПК: G01S 17/42, G01S 17/66
Мітки: канал, кутових, апаратів, вимірювання, можливістю, літальних, розпізнавання, швидкостей
Формула / Реферат:
Канал вимірювання кутових швидкостей літальних апаратів з можливістю розпізнавання ЛА, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою (Лн), модифікований блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, тригери "1"|"0", схеми "і",...
Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання ла для лвс
Номер патенту: 52932
Опубліковано: 10.09.2010
Автори: Клівець Сергій Іванович, Васильєв Дмитро Геннадійович, Копилов Олександр Олексійович, Злотніков Андрій Львович, Рисований Олександр Миколайович, Садовий Костянтин Віталійович, Воронов Дмитро Миколайович, Подорожняк Андрій Олексійович, Коломійцев Олексій Володимирович, Воробйов Руслан Володимирович
МПК: G01S 17/42
Мітки: вимірювання, літальних, розпізнавання, лвс, апаратів, радіальної, канал, швидкості, можливістю
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання ЛА для ЛВС, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач (ШП), резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів, схеми "і", лічильники, змішувачі,...
Попередній патент: Газовий пальник
Наступний патент: Декоративний чохол для труни
Випадковий патент: Пристрій для ліквідації вибухових речовин