Спосіб побудови області допустимих режимів газоперекачувального агрегату
Номер патенту: 57577
Опубліковано: 15.06.2006
Автори: Коток Валерій Борисович, Колодяжний Валерій Васильович, Хохряков Михайло Вікторович, Сорокін Олександр Олександрович, Соляник Володимир Григорович, Дістрянов Сергій Володимирович, Тевяшева Ольга Андріївна
Формула / Реферат
Корисна модель стосується пневматичних підйомників, зокрема ліфтів, використовуваних у житлових будинках і інших спорудженнях.
Відомим є прийнятий найближчим аналогом корисної моделі пневматичний ліфт, розроблений американською компанією «Daytona Elevator» зі штату Флорида, описаний в інформації «Новости науки и технологий. Вакуумный лифт с шумом всасывает пассажиров», опублікованої на сайтах Інтернету http://pr.kg/articles, www.membrana.ru.
Вакуумний пневматичний ліфт являє собою прозорий "міхур", що може піднімати й опускати пасажирів без будь-яких тросів, шківів або гідравлічних циліндрів. Призначений для монтажу в невеликих будинках, може мати різну довжину, а також два або три пункти зупинки: верхній і нижній поверхи, а також вихід на "проміжній станції". Ліфт містить круглу прозору шахту з полікарбонату із зовнішнім діаметром 94 сантиметра, у якій ходить кабіна. Дах кабіни це поршень, припасований до стінок шахти, виготовлений, в основному, з алюмінієвого сплаву. Двері в шахті закриваються герметично, а сама кабіна вентилюється знизу. Коли компактний повітряний вакуумний насос, установлений нагорі шахти, відсмоктує повітря із зони над кабіною - вона їде нагору, оскільки в самій кабіні, як і в шахті під нею нормальний атмосферний тиск (аж унизу шахти, у підлоги є вікна для проходу повітря). Якщо необхідно їхати вниз - клапан пневматичної системи нагорі шахти потроху впускає повітря в зону розрідження, плавно регулюючи швидкість спуска. Для здійснення спуска енергія не потрібна. Швидкість руху становить 9,14 метра у хвилину, а вантажопідйомність - 204 кілограма (у кабіні можуть поміститися дві людини). Двері на різних поверхах можуть відкриватися як в одну, так і в іншу сторони, наприклад, на першому поверсі - на південь, а на другому - на північ. Під час входу й виходу кабіну фіксують додаткові механічні стопори. Головна перевага такого ліфта - мінімальна переробка будинку для його установки. Відпадає необхідність рити яму під шахтою й улаштовувати спеціальне відділення на горищі. Необхідно лише проробити круглий отвір у підлозі, а у випадках розміщення шахти збоку будинку не потрібно й цього. Монтаж вакуумного ліфта займає лічені години. Ліфт надійний - у ньому неможливо застрягти між поверхами або впасти вниз. Датчик виявить розгерметизацію верхньої частини шахти (якщо така малоймовірна подія трапиться, тому що електромагнітні замки стежать за запиранням дверей) і задіє гальмо, змонтоване на даху кабіни. При відключенні електрики клапан нагорі автоматично закривається, і кабіна повільно сповзає вниз, у міру просочування повітря у верхню зону.
Ознаками найближчого аналога, що збігаються з суттєвими ознаками корисної моделі, є наявність у пневматичному ліфті шахти, обмеженої стінками, із дверима, кабіни з поршнем, припасованим до стінок шахти, стопорів кабіни, пневматичного насоса, пневматичної системи.
Технічним результатом корисної моделі є підвищення надійності й безпеки ліфта.
Причинами, що перешкоджають досягненню технічного результату при використанні найближчого аналога, є низька надійність через необхідність герметизації всієї шахти й неможливість створення вакууму при відключенні електроенергії, відсутність безпеки через необхідність створення й підтримки розрідження повітря в зоні шахти.
В основу корисної моделі поставлена технічна задача вдосконалення конструкції пневматичного ліфта.
Поставлена технічна задача вирішується тим, що в пневматичному ліфті, що включає шахту, обмежену стінками, із дверима, кабіну з поршнем, припасованим до стінок шахти, стопори кабіни, пневматичний насос, пневматичну систему, згідно корисній моделі шахта виконана герметичною нижче верхнього поверху, поршень розміщений під кабіною, пневматичний насос виконаний нагнітаючим, пневматичний ліфт постачений аварійним повітряним насосом, що підкачує, двері нижче верхнього поверху виконані такими, що закриваються герметично, шахта ліфта постачена знизу опорною камерою.
Між сукупністю суттєвих ознак корисної моделі й технічним результатом, що досягається при її використанні існує наступний причинно-наслідковий зв'язок. Наявність кабіни з поршнем, припасованим до стінок шахти й виконаним під кабіною та нагнітаючого пневматичного насоса дозволить кабіні з пасажирами перебувати не в підвішеному стані, а опиратися на повітря під тиском, яке нагнітається за допомогою насоса, що є значно більш надійним. Підвищить надійність виконання шахти герметичною тільки нижче верхнього поверху, а також виконання дверей такими, що закриваються герметично тільки нижче верхнього поверху. Підвищить безпеку пневматичного ліфта постачання його аварійним повітряним насосом, що підкачує. Наявність опорної камери забезпечить надійність при подачі повітря знизу.
Корисна модель проілюстрована графічним матеріалом, де на фігурах 1, 2 і 3 представлена схема ліфта для триповерхового будинку. На фігурі 1 кабіна ліфта перебуває на першому поверсі, на фігурі 2 - кабіна ліфта знаходиться на другому поверсі; на фігурі 3 - кабіна ліфта знаходиться на верхньому, третьому поверсі.
Пневматичний ліфт містить шахту 1 (наприклад, циліндричну), обмежену стінками 2, кабіну 3, пневматичний насос 4, з'єднаний із пневматичною системою (на фігурах не показана). Шахта 1 постачена опорною камерою 5 для забезпечення підпору повітря, дверима 6, що закриваються герметично, на нижніх поверхах і негерметичними дверима 7 на верхньому поверсі. Під кабіною 3 розташований поршень 8, виконаний з ущільнюючого матеріалу, припасований до стінок 2.
Пневматичний ліфт працює в такий спосіб. Від пневматичного насоса 4 високого тиску (наприклад, з напором 5900-15000Па, що дозволяє забезпечити вантажопідйомність ліфта до 200кг), у опорну камеру 5 нагнітається повітря, що давить знизу на поршень 8, штовхаючи кабіну 3 нагору. Проміжна зупинка на поверсі може бути забезпечена стопорами (на фігурах не показані) кабіни 3. Забезпечення необхідної швидкості підйому регулюється продуктивністю й напором пневматичного насоса 4. Для руху вниз відключається пневматичний насос 4, тиск під кабіною 3 падає, й вона під дією сили ваги опускається. Швидкість спуску можна регулювати випускними клапанами пневматичної системи (на фігурах не показані), керованими з кабіни 3, при цьому вільне падіння її виключене. При аварійному відключенні пневматичного насоса 4 кабіна 3 може бути піднята нагору за рахунок підкачування повітря аварійним повітряним насосом, що підкачує, наприклад, ножним (на фігурах не показаний).
Текст
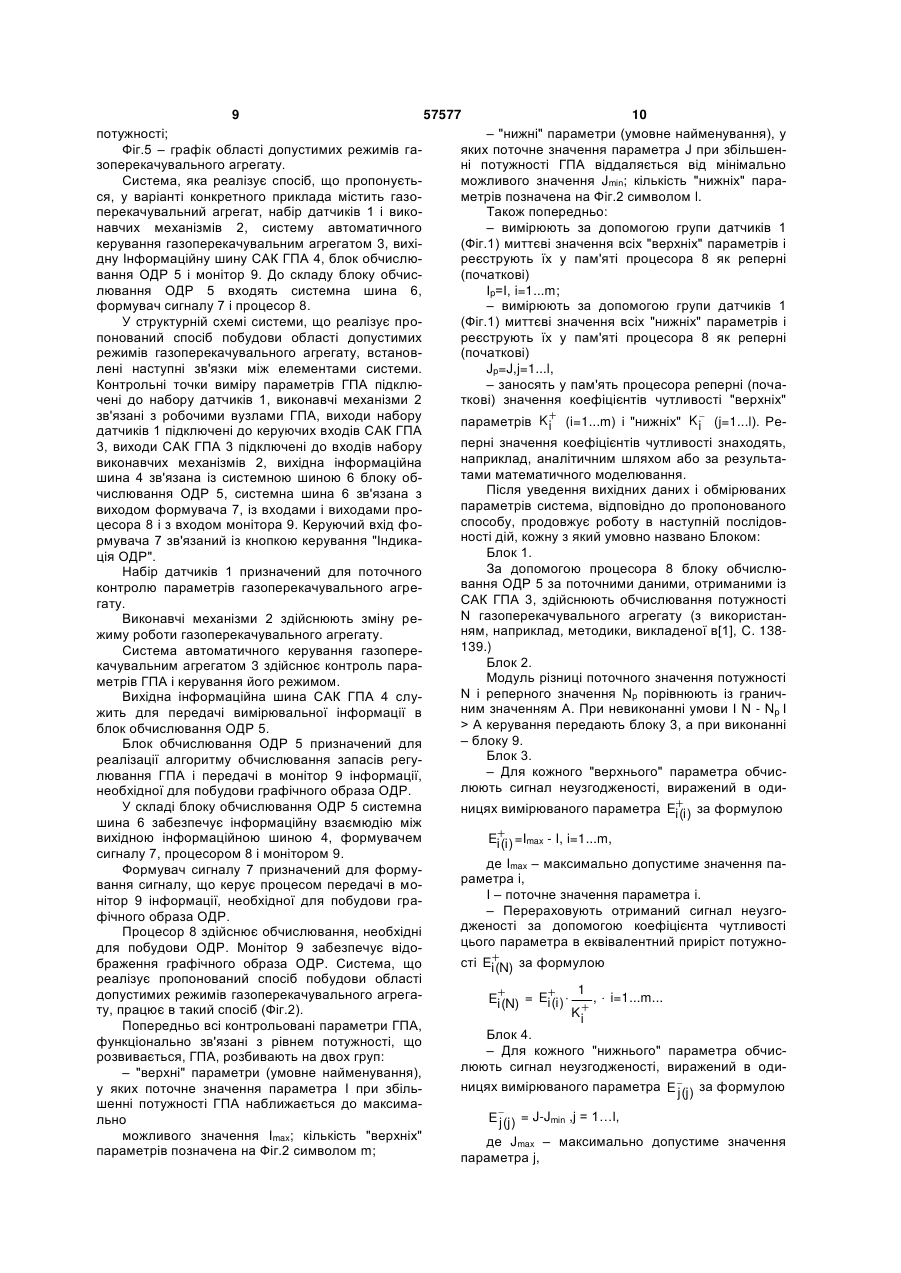
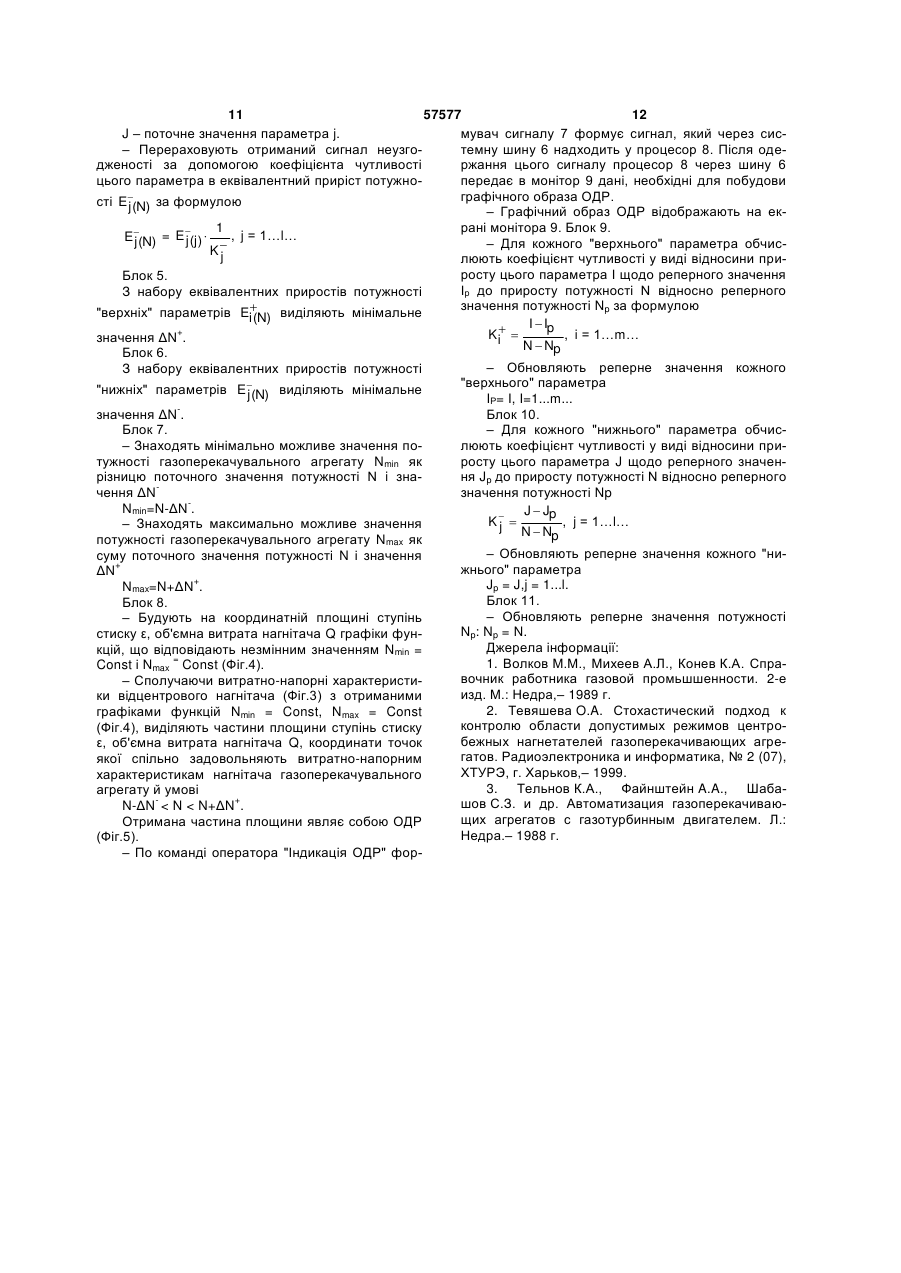
Спосіб побудови області допустимих режимів газоперекачувального агрегату, що включає поточні виміри за допомогою датчиків контрольованих параметрів газоперекачувального агрегату й автоматичну обробку результатів вимірів, при якій обчислюють неузгодженості контрольованих параметрів від їх гранично допустимих значень, і формують сигнал досягнення межі допустимого режиму по зміні кожного зі знаків неузгодженостей, який відрізняється тим, що результуючу віддаленість робочої точки газоперекачувального агрегату від меж допустимих режимів за всіма контрольованими параметрами визначають кількісно у вигляді максимально допустимих приростів поточної потужності у бік збільшення і у бік зменшення, при цьому періодично обчислюють коефіцієнти чутли вості контрольованих параметрів до зміни потужності газоперекачувального агрегату, за допомогою коефіцієнтів чутливості перераховують поточні значення неузгодженостей контрольованих параметрів в еквівалентні прирости потужності, з яких виділяють мінімально еквівалентний приріст потужності у бік збільшення, яке дорівнює максимально допустимому приросту поточної потужності, і мінімально еквівалентний приріст потужності у бік зменшення, яке дорівнює максимально допустимому зменшенню поточної потужності, а графічний образ області допустимих режимів відображають засобами візуального відображення на площині з координатами ступінь стиску газу , витрата газу Передбачуваний винахід відноситься до автоматизації газової промисловості і, зокрема, до систем автоматичного керування газоперекачувальними агрегатами. Сучасна система автоматичного керування газоперекачувальним агрегатом (САК ГПА) містить ряд функціональних блоків, наприклад, блок керування подачею палива, блок антипомпажного регулювання і т.д. До їхнього числа відноситься і блок, що здійснює моніторинг ГПА, який полягає в зборі поточних значень параметрів стану агрегату, оцінці допустимих значень параметрів (контроль недосягнення параметрами граничних значень) і відображення для оператора-людини результату процесу керування ГПА у вигляді положення робочої точки ГПА відносно границь області допустимих режимів (ОДР). ОДР ГПА будується на площині з координатами ступінь стиску ε, об'ємна витрата нагнітача Q і являє собою замкнуту частину площини, кожній точці якої відповідають припустимі значення тих параметрів ГПА, що однозначно визначаються (19) UA (11) N - максимально допустимий приріст поточної потужності газоперекачувального агрегату у бік зменшення. (13) N - максимально допустимий приріст поточної потужності газоперекачувального агрегату у бік збільшення; 57577 N N N N N , де N - поточна потужність газоперекачувального агрегату; C2 Q, виділяючи частини зазначеної площини, координати точок якої спільно задовольняють витратно-напірним характеристикам нагнітача газоперекачувального агрегату й умові 3 57577 4 величинами ε і Q. Слід зазначити, що кожній компоправочні коефіцієнти Ці емпіричні залежності і бінації значень ε, Q відповідає єдине значення поправочні коефіцієнти являються результатом потужності ГПА. Це випливає з формули обчисусереднення даних, отриманих раніше для ряду лення потужності ([1], С. 138). ГПА (однотипних з розглянутими) і тому відбиваПриклад побудови ОДР – [2], С.114. ють поточний технічний стан розглянутого ГПА Відзначимо наступні обставини. лише приблизно з незадовільною точністю. Крім ГПА являє собою силову установку, що викотого, паспортні і фактичні характеристики нагнітанує роботу зі стиску газу і його переміщенню в обчів істотно відрізняються через знос. У результаті ласть підвищеного тиску. Основним параметром розглянутий спосіб визначення запасу регулюванГПА, який відбиває його здатність виконувати роня ГПА за потужністю убік збільшення не має неботу, є потужність, що розвивається, і допустимий обхідної точності, не забезпечує однозначну віддіапазон її зміни (запас регулювання за потужнісповідність між приналежністю робочої точки ГПА тю). до ОДР (тобто наявністю запасу регулювання за Інформація про поточні запаси регулювання потужністю) і відсутністю обмежень за параметраГПА за потужністю необхідна для перерозподілу ми, які контролюються. З цих причин такий спосіб навантаження між ГПА, які входять до складу комвизначення віддаленості робочої точки ГПА від пресорного цеху, перерозподілу навантаження між границі ОДР шляхом визначення запасу регулюцехами компресорної станції (КС) і для оперативвання ГПА за потужністю убік збільшення варто ного планування режиму КС, які входять у магіствизнати недостатньо надійним. ральний газопровід. Крім того, розглянутий спосіб не дозволяє виЗ урахуванням цього, функціональний блок значити поточні запаси регулювання за потужністю "ОДР", призначений для оперативного керування убік зменшення, не враховує результати контролю ГПА, повинний забезпечувати в автоматичному всіх параметрів стану ГПА, кількісно зв'язаних з режимі роботи: рівнем його потужності (з урахуванням поточного – кількісне визначення віддаленості робочої технічного стану ГПА і впливу зовнішніх умов), а точки ГПА від границь ОДР, виражених в одиницях також не дозволяє побудувати графічний образ потужності (запас регулювання убік збільшення і ОДР на режимній площині ε, Q. У результаті розгзменшення); лянутий спосіб варто визнати недостатньо точним – побудову ОДР на площині ε, Q з використандля оперативного керування режимом ГПА. ням засобів відображення оператора, який керує Отже, даний спосіб визначення віддаленості ГПА; робочої точки ГПА від границі ОДР шляхом визна– однозначну відповідність між приналежністю чення запасу регулювання ГПА убік збільшення, як робочої точки ГПА до ОДР і відсутністю обмежені спосіб побудови області допустимих режимів ганя за параметрами, які контролюються; зоперекачувального агрегату, що заявляється, – контроль усіх параметрів стану ГПА, кількісвключає поточні виміри за допомогою датчиків но зв'язаних з рівнем його потужності, з урахуванпараметрів газоперекачувального агрегату, які ням технічного стану вузлів ГПА (ступінь зносу) і контролюються, й автоматичну обробку результавпливу зовнішніх умов (температури і тиски атмотів вимірювань з обчисленням величини поточної сферного повітря). потужності ГПА, однак є недостатньо надійним і Відомий спосіб визначення віддаленості робонедостатньо точним для оперативного керування чої точки ГПА від границі ОДР шляхом визначення режимом ГПА. запасу регулювання ГПА убік збільшення, що поВідомий також спосіб побудови області допуслягає в обчисленні максимальної робочої потужтимих режимів відцентрових нагнітачів ГПА [2], ності (інша назва - наявної потужності) на муфті який призначений для оперативного контролю і (промвалу) ГПА, яку агрегат може розвити в конккерування режимом ГПА і використовує імовірнісретних умовах роботи на компресорній станції ([1], ний (стохастичний) підхід до формування границь С. 135, формула 5.17). Різниця між наявною потуОДР і визначенню місця розташування в ній робожністю і поточною потужністю ([1], С. 138, формучої точки. ла для Ne) являє собою запас регулювання за поДаний відомий спосіб побудови ОДР використужністю убік збільшення. Даний запас можна товує: розглядати як віддаленість робочої точки ГПА від – математичну модель фізичних процесів у тієї границі ОДР, яка відповідає максимально моробочій порожнині нагнітача, що описує зв'язок між жливим значенням потужності ГПА. параметрами (коефіцієнтом стискальності газу, У загальному вигляді спосіб включає поточні коефіцієнтом політропічного стиску, коефіцієнтом виміри за допомогою датчиків параметрів газопетеплоємності газу, показником адіабати, псевдокрекачувального агрегату, які контролюються, й ритичним тиском і температурою газової суміші і автоматичну обробку результатів вимірів, при якій т.д.) у деякому узагальненому, ідеалізованому обчислюють величини поточної потужності ГПА. відцентровому нагнітачі; Далі у відомому способі обчислюється коефіцієнт – паспортні характеристики нагнітача, що відтехнічного стану газотурбінної установки KN ([1], різняються від фактичних (результат зносу й індиС. 135), необхідний для визначення наявної потувідуальних особливостей проточної частини кожжності. ного конкретного нагнітача); Для обчислення коефіцієнта KN ([1], С. 162– граничні значення витрати (Qmin, Qmax) і ная166) використовують емпіричні залежності між вної потужності (Npacп) які розглядаються як конспараметрами агрегату (різні для різних типів ГПА), танти, поза зв'язком з індивідуальними особливоспаспортні характеристики нагнітачів І емпіричні тями кожного ГПА і параметрами режиму його 5 57577 6 газотурбінного двигуна. і електромеханічний перетворювач ЕМП ([1], С. 61, Оскільки математичний опис фізичного проце62). су завжди використовує ряд ідеалізацій, повну Робота МІРТ і ЕМП полягає у формуванні сигвідповідність між параметрами реального процесу налу неузгодженості поточної температури з її і параметрами, знайденими з моделі, одержати не максимально припустимим рівнем і перетворенні можна. Крім того, заміна фактичних характеристик сигналу неузгодженості у вихідний сигнал керунагнітача паспортними і фіксація граничних знавання, що надходить на ЕМП. У залежності від чень витрати і наявної потужності, приведе до ісступеня відкриття виконавчого органа ЕМП змінютотної розбіжності границь ОДР, побудованої за ється кількість повітря в лінії проточного повітря, допомогою розглянутого способу і границь фактищо визначає положення регулювального клапана чної (дійсної) ОДР, що відбиває результат порівв лінії паливного газу. няння всіх параметрів ГПА з їх граничноАналогічно обмежувач прийомистості, що конможливими значеннями. тролює співвідношення між положенням регулюТакож розглянутий спосіб не забезпечує одновального клапана і вихідним тиском осьового комзначної відповідності між приналежністю робочої пресора, обмежує величину максимального точки ГПА до ОДР і відсутністю обмежень за павідкриття регулюючого клапана. раметрами, які контролюються, не дозволяє виСигналізатор помпажа СП-100 по сигналу пезначити поточні запаси регулювання за потужністю реходу тиску на конфузорі відцентрового нагнітача убік збільшення й убік зменшення і не враховує і різниці вихідного і вхідного тисків нагнітача відтрезультати контролю всіх параметрів стану ГПА, ворює лінію режимів, близьку до помпажної межі і кількісно зв'язаних з рівнем його потужності. при зниженні віддаленості робочої точки нагнітача З урахуванням цього розглянутий спосіб побудо цієї межі формує сигнал відкриття крана Кр6. дови ОДР не може використовуватися для операУстановка А705-15, крім функцій керування режитивного керування режимом ГПА як недостатньо мом ГПА, здійснює за допомогою датчиків допуснадійний. ковий контроль параметрів шляхом порівняння Отже, даний спосіб побудови області допусвихідних сигналів датчиків з уставками граничних тимих режимів відцентрових нагнітачів ГПА, як і значень. Зміна знака сигналу неузгодженості, що спосіб побудови області допустимих режимів газовиникає при зменшенні сигналу нижче мінімально перекачувального агрегату, що заявляється, місприпустимого рівня (для параметрів, контрольоватить у собі поточні виміри за допомогою датчиків них по нижній межі), чи при збільшенні сигналу параметрів газоперекачувального агрегату, які вище припустимого рівня (для параметрів, контроконтролюються, й автоматичну обробку результальованих по верхній межі) використовується або тів вимірів, за якими будується математична модля формування сигналу попереджувальної сигдель фізичних процесів у робочій порожнині нагніналізації оператору, або для формування автоматача, однак є недостатньо надійним і недостатньо тичної аварійної зупинки ГПА. точним для оперативного керування режимом Таким чином, спосіб-прототип здійснює контГПА. роль усіх параметрів стану ГПА, кількісно зв'язаНайближчим за технічною суттю аналогом, них з рівнем його потужності, з урахуванням техніобраним як прототип, є спосіб побудови області чного стану вузлів ГПА (ступінь зносу) і впливу допустимих режимів ГПА [3], що включає поточні зовнішніх умов (температури і тиску атмосферного виміри за допомогою датчиків параметрів газопеповітря), а також забезпечує однозначну відповідрекачувального агрегату, які контролюються, й ність між приналежністю робочої точки ГПА до автоматичну обробку результатів вимірів, при якій ОДР і відсутністю обмежень за параметрами, які обчислюють неузгодженості параметрів, які контконтролюються. ролюються, з їхніми гранично-допустимими знаПри цьому спосіб-прототип не дозволяє кількіченнями і формують сигнал досягнення межі досно визначити віддаленість робочої точки ГПА від пустимого режиму за зміною кожного зі знаків границь ОДР, виражену в одиницях потужності, а сигналів неузгодженостей. також не виконує побудову ОДР на площині ε, Q з Спосіб реалізується системою автоматичного використанням засобів відображення оператора, керування газоперекачувального агрегату, що місщо керує ГПА. тить наступні основні функціональні блоки: Отже, даний спосіб побудови області допус1 – систему автоматичного регулювання податимих режимів ГПА, як і спосіб побудови області чі паливного газу ([1], С. 11-17, С. 41, С. 61, 62); допустимих режимів газоперекачувального агрега2 – сигналізатор помпажа ([1], С. 90, 95); ту, що заявляється, включає поточні виміри за 3 – установку централізованого контролю і кедопомогою датчиків параметрів газоперекачуварування А705-15 ([1], С. 143). льного агрегату, які контролюються, й автоматичну Система автоматичного регулювання подачі обробку результатів вимірів, при якій обчислюють паливного газу містить: неузгодженості параметрів, які контролюються, з їх – основний регулятор, що підтримує задану гранично-допустимими значеннями і формують частоту обертання вала нагнітача; сигнал досягнення межі припустимого режиму по – два обмежуючих (граничних) регулятори, що зміні кожного зі знаків неузгодженостей, однак є контролюють і обмежують відповідно температуру недостатньо надійним і недостатньо точним для продуктів, згоряння перед турбіною високого тиску оперативного керування режимом ГПА. і, співвідношення повітря-паливний газ. В основу винаходу поставлена задача в споКонтроль і обмеження температури здійснюсобі побудови області допустимих режимів газопеють МІРТ (малоінерційний регулятор температури) рекачувального агрегату шляхом уведення додат 7 57577 8 ково кількісного визначення результуючої віддалемеж допустимих режимів за всіма параметрами, ності робочої точки газоперекачувального агрегату які контролюються, у виді максимально допустивід меж допустимих режимів за всіма параметрамих приростів поточної потужності убік збільшення ми, які контролюються, у виді максимально допусй убік зменшення і відображення графічного обратимих приростів поточної потужності убік збільза області допустимих режимів засобами візуальшення й убік зменшення і відображення ного відображення на площині з координатами графічного образа області допустимих режимів ступінь стиску газу ε, витрата газу Q – введені в засобами візуального відображення на площині з спосіб побудови області допустимих режимів ГПА, координатами ступінь стиску газу ε, витрата газу при взаємодії з відомими ознаками, а саме поточQ, забезпечити підвищення надійності і підвищенними вимірами за допомогою датчиків параметрів ня точності керування режимом ГПА. газоперекачувального агрегату, які контролюютьЗадача, що поставлена, вирішується за рахуся, й автоматичною обробкою результатів вимірів, нок того, що у відомому способі побудови області при якій обчислюють неузгодженості параметрів, допустимих режимів ГПА, що включає поточні виякі контролюються, з їх гранично допустимими міри за допомогою датчиків параметрів газоперезначеннями і формуванням сигналу досягнення качувального агрегату, які контролюються, й автомежі допустимого режиму по зміні кожного зі знаків матичну обробку результатів вимірів, при якій неузгодженостей, забезпечують прояв нових техобчислюють неузгодженості параметрів, які контнічних характеристик - можливість кількісної оцінки ролюються, з їх гранично допустимими значеннязапасів регулювання за потужністю газоперекачуми і формують сигнал досягнення межі допустимовального агрегату і можливість візуального спого режиму по зміні кожного зі знаків стереження за положенням робочої точки ГПА неузгодженостеи, ВІДПОВІДНО ДО ВИНАХОДУ, відносно границі ОДР, що приводить до підвищендодатково результуючу віддаленість робочої точки ня надійності і підвищення точності керування гагазоперекачувального агрегату від меж допустизоперекачувальним агрегатом. мих режимів за всіма параметрами, які контролюДаний взаємозв'язок пояснюється таким чиються, визначають кількісно у виді максимально ном. допустимих приростів поточної потужності убік У системах керування трубопровідним трансзбільшення й убік зменшення, при цьому періодипортом газу характеристики надійності і точності чно обчислюють коефіцієнти чутливості параметкерування ГПА оцінюються так. рів, які контролюються, до зміни потужності газоНадійність визначають за ступенем безперерперекачувального агрегату, за допомогою вності (безперебійності) процесу перекачування коефіцієнтів чутливості перераховують поточні газу, який може бути порушений, наприклад, при значення неузгодженостей параметрів, які контровичерпанні запасів регулювання за потужністю люються, в еквівалентні прирости потужності, з газоперекачувальних агрегатів компресорного яких виділяють мінімальне еквівалентний приріст цеху (КЦ). Наявність кількісної оцінки запасів регупотужності убік збільшення, яке дорівнює максилювання (віддаленості робочої точки від границь мально допустимому приросту поточної потужносОДР) дозволяє вчасно запустити резервний агреті, і мінімальне еквівалентний приріст потужності гат, виключивши тим самим різке порушення реубік зменшення, яке дорівнює максимально допусжиму транспортування газу. тимомузменшенню поточної потужності, а графічТочність визначають за ступенем відхилень ний образ області допустимих режимів відобравихідних тисків компресорних цехів від значень, жають засобами візуального відображення на заданих диспетчерською службою магістрального площині з координатами ступінь стиску газу ε, вигазопроводу. При відсутності кількісної оцінки затрата газу Q, виділяючи частини зазначеної плопасів регулювання за потужністю керування вихідщини, координати точок якої спільно задовольняною потужністю кожного ГПА можливо тільки з ють витратно-напорним характеристикам застосуванням найпростішого "релейного" закону нагнітача і стюперекачувального агрегату й умові керування, що використовує один біт інформації + N-ΔN
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for building the range of allowed modes of operation of gas-compressor unit
Автори англійськоюSolianyk Volodymyr Hryhorovych, Kolodiazhnyi Valerii Vasyliovych, Sorokin Oleksandr Oleksandrovych, Khokhriakov Mykhailo Viktorovych, Distrianov Serhii Volodymyrovych, Kotok Valerii Bronislavovych, Teviasheva Olha Andriivna
Назва патенту російськоюСпособ построения области допустимых режимов газоперекачивающего агрегата
Автори російськоюСоляник Владимир Григорьевич, Колодяжный Валерий Васильевич, Сорокин Александр Александрович, Хохряков Михаил Викторович, Дистрянов Сергей Владимирович, Коток Валерий Борисович, Тевяшева Ольга Андреевна
МПК / Мітки
МПК: F04B 49/00, F04D 27/00
Мітки: допустимих, режимів, побудови, області, агрегату, газоперекачувального, спосіб
Код посилання
<a href="https://ua.patents.su/7-57577-sposib-pobudovi-oblasti-dopustimikh-rezhimiv-gazoperekachuvalnogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Спосіб побудови області допустимих режимів газоперекачувального агрегату</a>
Спосіб аварійного зупинення газоперекачувального агрегату
Номер патенту: 36255
Опубліковано: 16.06.2003
Автори: Колодяжний Валерій Васильович, Рудник Анатолій Андрійович, Хохряков Михайло Вікторович, Сорокін Олександр Олександрович, Бантюков Сергій Євгенович, Соляник Володимир Григорович, Дістрянов Сергій Володимирович
МПК: F04D 27/02
Мітки: агрегату, зупинення, газоперекачувального, аварійного, спосіб
Формула / Реферат:
1. Спосіб аварійного зупинення газоперекачувального агрегату, який полягає в тому, що при порушенні уставки будь-яким параметром захисту газоперекачувального агрегату виконують відкриття антипомпажного крана нагнітача, вимкнення двигуна приводу газоперекачувального агрегату, закриття вхідного та вихідного кранів і відкриття свічного крана нагнітача, який відрізняється тим, що усі параметри захисту газоперекачувального агрегату попередньо...
Спосіб захисту компресора газоперекачувального агрегату від помпажу
Номер патенту: 47153
Опубліковано: 17.06.2002
Автори: Дістрянов Сергій Володимирович, Дудко Павло Григорович, Хохряков Михайло Вікторович, Колодяжний Валерій Васильович, Сорокін Олександр Олександрович, Котляров Володимир Олегович
МПК: F04D 27/02
Мітки: захисту, агрегату, спосіб, помпажу, газоперекачувального, компресора
Формула / Реферат:
Спосіб захисту компресора газоперекачувального агрегату від помпажу шляхом вимірювання поточних значень параметрів, які характеризують положення робочої точки компресора, уточнення та запам'ятовування положення межі помпажу і формування вихідного сигналу антипомпажного регулятора пропорційно віддаленості робочої точки компресора від межі помпажу, який відрізняється тим, що уточнення положення межі помпажу проводять, використовуючи...
Спосіб захисту компресора газоперекачувального агрегату від помпажу
Номер патенту: 5427
Опубліковано: 15.03.2005
Автори: Хохряков Михайло Вікторович, Доценко Андрій Іванович, Колодяжний Валерій Васильович, Слесар Петро Федорович, Чепурний Олександр Петрович, Соляник Володимир Григорович, Дістрянов Сергій Володимирович
МПК: F04D 27/02
Мітки: агрегату, спосіб, газоперекачувального, помпажу, захисту, компресора
Формула / Реферат:
Спосіб захисту компресора газоперекачувального агрегату від помпажу шляхом вимірювання поточних значень параметрів, що характеризують положення робочої точки компресора, уточнення і запам'ятовування положення межі помпажу і формування вихідного сигналу антипомпажного регулятора пропорційно віддаленості робочої точки компресора від межі помпажу, який відрізняється тим, що уточнення положення межі помпажу виконують шляхом виявлення переходу...
Спосіб контролю роботи газоперекачувального агрегату
Номер патенту: 29136
Опубліковано: 16.10.2000
Автори: Розгонюк Василь Васильович, Челомбітько Георгій Олександрович, Ільченко Борис Самуілович, Максімов Вячеслав Павлович, Бантюков Євген Миколайович, Ізбаш Віктор Іванович, Коток Валерій Борисович
МПК: F04D 27/00
Мітки: газоперекачувального, спосіб, роботи, контролю, агрегату
Формула / Реферат:
Спосіб контролю роботи газоперекачуючого агрегату, включаючий вимірювання значень технологічних параметрів, запис їх в перший масив пам'яті, порівняння значень технологіних параметрів з встановленними для кожного із них межами і формування сигналу при порушенні значенням якого-небудь технологічного параметра встановленнях для нього меж, заздалегідь формування логічних умов виникнення аварійної ситуації, який відрізняється тим що заздалегідь...
Парогазотурбінний привід газоперекачувального агрегату компресорної станції

Номер патенту: 67878
Опубліковано: 15.07.2004
Автори: Рудник Анатолій Андрійович, Крівуца Віль Андрійович, Мокеєв Юрій Геннадійович, Уваричев Олександр Миколайович, Дикий Микола Олександрович, Ісаков Борис Володимирович, Романов Віктор Іванович, Немчин Олександр Федорович, Коломєєв Валентин Миколайович, Бондін Юрій Миколайович
МПК: F01K 21/00, F02C 6/18
Мітки: агрегату, привід, станції, компресорної, газоперекачувального, парогазотурбінний
Формула / Реферат:
Газопаротурбінний привід газоперекачувального агрегату компресорної станції, що містить повітряний компресор, камеру згорання, газопарову турбіну, зв'язану з компресором та нагнітачем природного газу, і послідовно розташовані за турбіною по напрямку руху відпрацьованих газів котел-утилізатор з економайзером, випарником, пароперегрівником і барабаном-сепаратором та конденсатор, при цьому барабан-сепаратор своїм входом по воді підключений до...
Попередній патент: Спосіб гранулювання азотних добрив та пристрій для його здійснення
Наступний патент: Автомобільний кран
Випадковий патент: Рама візка тепловоза