Ортопедичний пристрій


Формула / Реферат
1. Ортопедичний пристрій, що містить поверхню для сидіння і систему контролю положення тіла, яка включає щонайменше один датчик і блок керування, який містить мікропроцесор, пристрій подачі сигналу і джерело живлення, електрично з'єднані між собою, при цьому датчик виконаний з можливістю передачі даних про положення тіла на мікропроцесор, який відрізняється тим, що блок керування підключений до програмно-апаратного комплексу, виконаного з можливістю керування мікропроцесором, одержання від нього даних, переданих щонайменше одним датчиком, і аналізу отриманих даних.
2. Ортопедичний пристрій за п. 1, який відрізняється тим, що датчик являє собою елемент, вибраний з групи, що включає ємнісний датчик, тензометричний датчик.
3. Ортопедичний пристрій за п. 1, який відрізняється тим, що програмно-апаратний комплекс являє собою персональний комп'ютер, який включає монітор, із установленою на ньому програмою керування мікропроцесором.
4. Ортопедичний пристрій за п. 1, який відрізняється тим, що блок керування підключений до програмно-апаратного комплексу за допомогою провідного і/або безпровідного зв'язку.
5. Ортопедичний пристрій за п. 1, який відрізняється тим, що сигнал являє собою один з сигналів, вибраних із групи, що включає звуковий сигнал, світловий сигнал, вібраційний сигнал.
6. Ортопедичний пристрій за п. 3, який відрізняється тим, що програма керування мікропроцесором виконана з можливістю виводу на монітор мультимедійних інформаційних повідомлень.
7. Ортопедичний пристрій за п. 1, який відрізняється тим, що джерело живлення являє собою щонайменше один елемент, вибраний із групи, яка включає акумулятор і гальванічний елемент.
8. Ортопедичний пристрій за п. 1, який відрізняється тим, що джерело живлення виконане з можливістю щонайменше часткової підзарядки при підключенні до програмно-апаратного комплексу.
9. Ортопедичний пристрій за п. 1, який відрізняється тим, що додатково містить засіб магнітотерапії.
Текст
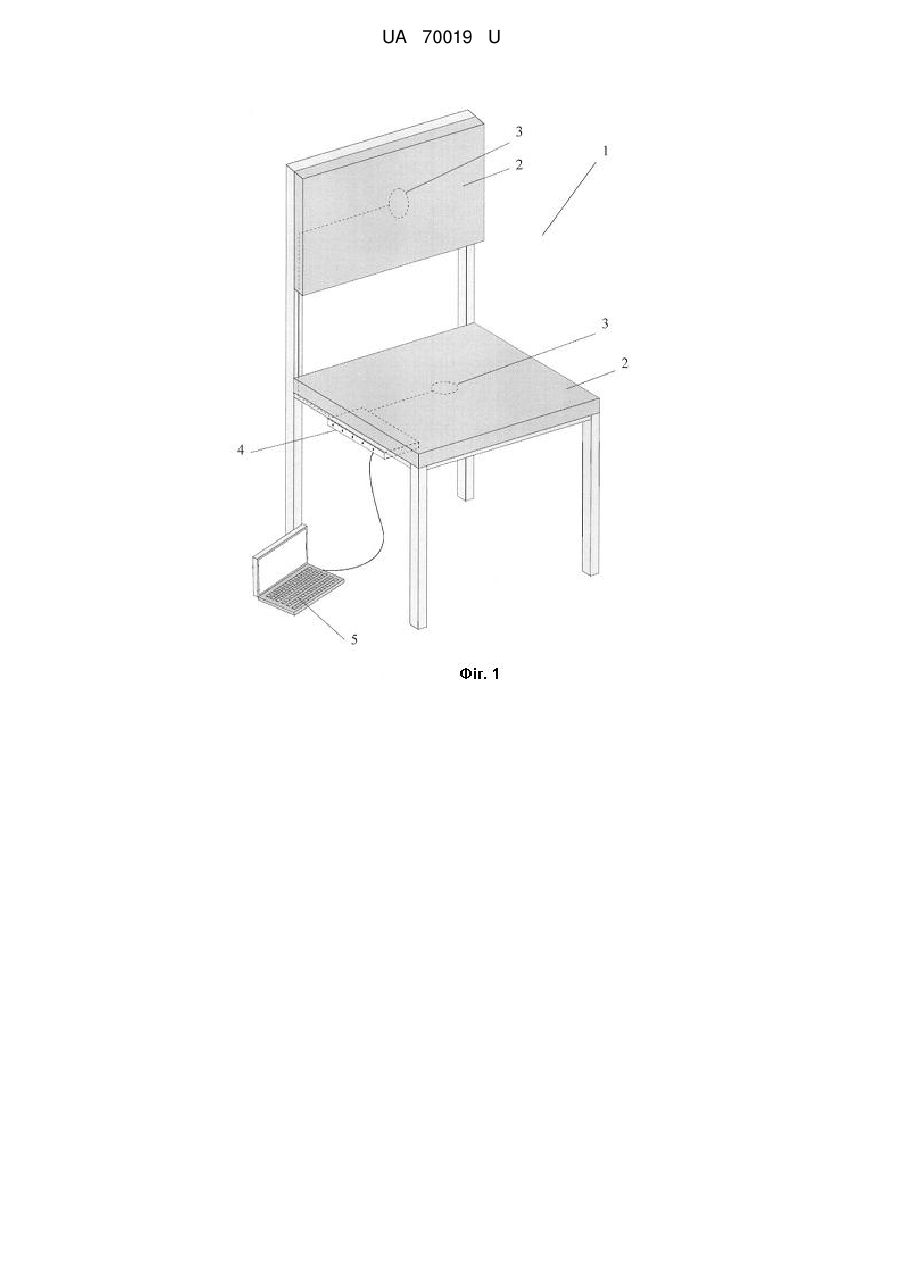
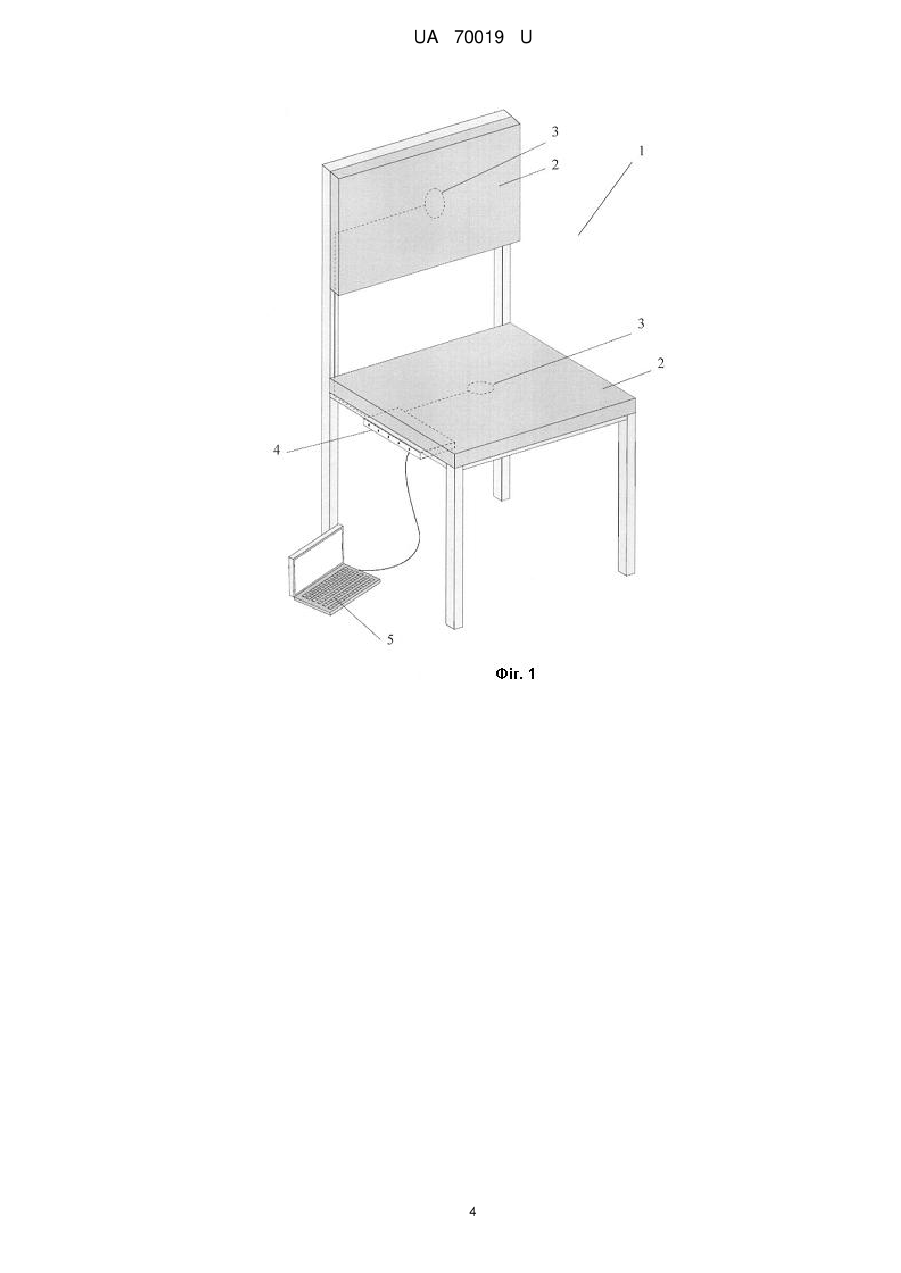
Реферат: UA 70019 U UA 70019 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до виробів оздоровчого характеру, зокрема до пристроїв для моніторингу й оцінки пози людини, яка сидить, для її оптимізації, а також для тренування м'язів спини. Значення постави для формування загального стану здоров'я доводиться великою поширеністю захворювань серцево-судинної і дихальної систем серед людей з порушенням постави. Від уміння правильно тримати своє тіло залежить не тільки зовнішній вигляд людей, але і їх здоров'я. Порушення постави несприятливо впливає на фізичний розвиток організму, особливо на функції кістково-м'язового апарата, серцево-судинної, дихальної і нервової систем. При нормальній поставі створюються сприятливі умови для роботи внутрішніх органів. Постава має велике естетичне значення. Мільйони глядачів із захопленням спостерігають за учасниками змагань з художньої і спортивної гімнастики, акробатики, фігурного катання, любуються стрункими, гармонічно розвиненими спортсменами з гарною поставою. Постава формується в процесі росту і розвитку людини і змінюється в залежності від умов побуту, навчання, праці. Малорухливий спосіб життя, сидяча робота призводять до проблем зі здоров'ям, особливу шкоду організму наносить робота за комп'ютером, тому, насамперед, потрібна правильна організація робочого місця. Таким чином, актуальною є проблема забезпечення правильної постави людини при її перебуванні в положенні сидячи протягом довгого часу. Відомий стілець для коректування постави людини, яка сидить, описаний у заявці Кореї №20090058627, опублікованій 10.06.2009, який містить велику кількість датчиків для визначення положення людини, яка сидить, встановлених на сидінні і спинці стільця, пристрій введення даних, у який надходять дані, отримані датчиком, мікропроцесор, що порівнює дані, які надійшли від датчиків із введеними критичними параметрами, і пристрій подачі сигналу, що подає сигнал у відповідності зі значенням параметра, обчисленим мікропроцесором. Найближчим аналогом корисної моделі, яка заявляється, і вибраним за прототип є засіб для сидіння, що включає сенсорний пристрій, описаний у Міжнародній заявці №0217752, опублікованій 07.03.2002. Описаний пристрій являє собою засіб для сидіння, що включає систему контролю положення тіла, яка містить щонайменше один датчик, мікропроцесор, пристрій подачі звукового, зорового або вібраційного сигналу, джерело живлення, електрично зв'язані між собою. Принцип дії описаних пристроїв полягає у відстеженні датчиками правильно прийнятої пози людиною, яка сидить, наприклад, за робочим столом. У випадку її порушення пристрій для сидіння за допомогою пристрою подачі сигналу повідомляє людині, яка сидить, про необхідність зайняти правильне положення. Однак описані пристрої мають недостатню експлуатаційну ефективність, оскільки не дозволяють провести ефективну оцінку і моніторинг положення людини, яка сидить, здійснити профілактику втоми і застійних процесів в організмі. Відносна незручність в експлуатації обґрунтована відсутністю можливості віддаленого контролю налаштуваннями мікропроцесора. Задачею корисної моделі, що заявляється, є створення такого ортопедичного пристрою, який завдяки підбору конструктивних елементів, а також ефективності їх взаємодії між собою дозволить забезпечити оптимальне положення людини, яка сидить, і отже, її правильну поставу, який буде зручним в експлуатації, дозволить відслідковувати положення людини, яка сидить, в реальному часі і складати статистику положення за визначений проміжок часу. Ще однією задачею корисної моделі є розширення функціональних можливостей пристрою, а саме наділення його функцією оздоровчого впливу на організм людини. Поставлена задача вирішується тим, що розроблено ортопедичний пристрій, який містить поверхню для сидіння і систему контролю положення тіла, що включає щонайменше один датчик і блок керування, який містить мікропроцесор, пристрій подачі сигналу і джерело живлення, електрично з'єднані між собою, при цьому датчик виконаний з можливістю передачі даних про положення тіла на мікропроцесор, який відрізняється тим, що блок керування підключений до програмно-апаратного комплексу, виконаного з можливістю керування мікропроцесором, одержання від нього даних, переданих щонайменше одним датчиком, і аналізу отриманих даних. Поверхня для сидіння факультативно включає опорні елементи і може являти собою як, наприклад, стілець або крісло, так і накидку, якою можна оснащувати будь-які придатні види меблів, такі як, наприклад, офісні стільці, стільці для сидіння в навчальних закладах, крісла автомобілів тощо. Датчик переважно являє собою елемент, вибраний з групи, яка включає ємнісний датчик або тензометричний датчик. Датчики можуть розташовуватися як на внутрішній частині поверхні для сидіння, так і зовні. Може здійснюватися персональне підстроювання розташування 1 UA 70019 U 5 10 15 20 25 30 35 40 45 50 55 60 датчиків у залежності від росту людини. При цьому вони переміщаються відповідно до розрахункової ростової таблиці в штатні місця. Блок керування переважно включає панель введення налаштувань мікропроцесора, яка являє собою рідкокристалічний монітор і кнопки введення, переважно виконані зі світлодіодною індикацією. У налаштуваннях можна вибирати тип сигналу, який подається пристроєм подачі сигналу, а саме світловий, звуковий або вібраційний, а також час затримки подачі сигналу - час подачі сигналу від моменту надходження даних від датчиків у мікропроцесор. У переважному варіанті здійснення програмно-апаратний комплекс являє собою персональний комп'ютер, який включає монітор, з установленою на нього програмою керування мікропроцесором. Персональний комп'ютер може являти собою будь-який вид комп'ютерів, придатних для установки подібної програми, наприклад ноутбук або смартфон. Зазначена програма дозволяє в окремому вікні керувати налаштуваннями мікропроцесора, відслідковувати в реальному часі положення людини, яка сидить, за допомогою одержання даних від мікропроцесора, а також проводити ретроспективний аналіз статистики постави за визначений проміжок часу з наступним виводом результатів аналізу на монітор персонального комп'ютера, що забезпечує зручність в експлуатації ортопедичного пристрою, який заявляється, а також можливість проведення оцінки ефективності використання ортопедичного пристрою. Переважно блок керування підключений до програмно-апаратного комплексу за допомогою провідного і/або безпровідного зв'язку. У блоці керування передбачений роз'єм USB, при цьому блок керування за допомогою USB-кабелю підключається до програмно-апаратного комплексу. Також підключення може здійснюватися за допомогою Bluetooth-з'єднання. У переважному варіанті здійснення корисної моделі сигнал, який подається пристроєм подачі сигналу при прийнятті неправильного положення людиною, яка сидить, являє собою один із сигналів, вибраних з групи, що включає звуковий сигнал, світловий сигнал або вібраційний сигнал. Переважно програма керування мікропроцесором виконана з можливістю виводу на монітор мультимедійних інформаційних повідомлень. Ці повідомлення можуть являти собою, наприклад, передані датчиком дані, проаналізовані дані або будь-яку іншу інформацію, що також може служити для сигналізації про неправильне положення людини, яка сидить, що створює додаткові зручності при експлуатації ортопедичного пристрою, оскільки людина, яка сидить, може сама вибрати спосіб оповіщення про неправильне положення, який їй сподобався: світловий сигнал, звуковий або вібраційний сигнал пристрою подачі сигналу, або ж мультимедійне повідомлення на моніторі персонального комп'ютера. Переважно джерело живлення являє собою щонайменше один елемент, вибраний з групи, що включає акумулятор і гальванічний елемент. Також в одному з варіантів здійснення джерело живлення виконане з можливістю щонайменше часткової підзарядки при підключенні до програмно-апаратного комплексу, при цьому підключення здійснюється за допомогою USB- кабелю. Також ортопедичний пристрій може додатково містити засіб магнітотерапії, що являє собою один або кілька неодимових магнітів, розташованих усередині або зовні поверхні для сидіння, наприклад, уздовж хребта в проекції м'язів спини людини, яка сидить. За допомогою даного засобу здійснюється профілактика втоми і застою крові в м'язах спини, а отже, оздоровчий вплив на організм людини. Магніти можуть бути встановлені окремо один від одного або ж з'єднані між собою, наприклад, за допомогою стрічок. Описаний засіб магнітотерапії встановлюється з можливістю зняття за необхідності. Корисна модель, яка заявляється, пояснюється за допомогою графічних матеріалів, наведених нижче. Фіг. 1 - загальний вид ортопедичного пристрою, де поверхня для сидіння включає опорні елементи і являє собою стілець; Фіг. 2 - загальний вид ортопедичного пристрою, що включає систему магнітотерапії, де поверхня для сидіння являє собою накидку. На Фіг. 1 представлений загальний вид ортопедичного пристрою 1 з поверхнею для сидіння 2, оснащеною опорними елементами, яка являє собою стілець, на якому розташовані датчики 3 і блок керування 4, який включає мікропроцесор і пристрій подачі сигналу (не показані). Блок керування з'єднаний за допомогою USB-кабелю з програмно-апаратним комплексом 5, що являє собою ноутбук із встановленою на ньому програмою керування мікропроцесором. На Фіг. 2 представлений загальний вид ортопедичного пристрою 1 з поверхнею для сидіння 2, що являє собою накидку, на якій розташовані датчики 3 і блок керування 4, який включає мікропроцесор і пристрій подачі сигналу (не показані). Блок керування з'єднаний за допомогою USB-кабелю з програмно-апаратним комплексом 5, який являє собою смартфон із 2 UA 70019 U 5 10 15 20 встановленою на ньому програмою керування мікропроцесором. На поверхні для сидіння додатково встановлені неодимові магніти 6 системи магнітотерапії. Описаний пристрій працює в такий спосіб. Датчики 3 розташовують усередині поверхні для сидіння 2 ортопедичного пристрою 1 у залежності від росту людини, яка сидить. Задають необхідні налаштування мікропроцесора за допомогою панелі введення налаштувань мікропроцесора, розташованої на блоці керування 4, або за допомогою програмно-апаратного комплексу 5, попередньо підключеного до зазначеного блока керування 4. Приймають положення сидячи. Передають дані про положення тіла людини, яка сидить, з датчиків 3 на мікропроцесор у блоці керування 4. При відхиленні положення тіла людини, яка сидить, від правильного подають звуковий, світловий або вібраційний сигнал за допомогою пристрою подачі сигналу в блоці керування 4 або за допомогою виводу на монітор програмно-апаратного комплексу 5 мультимедійного інформаційного повідомлення, що сигналізує про неправильне положення людини, яка сидить. За необхідності проводять ретроспективний аналіз статистики постави за визначений проміжок часу за допомогою програмно-апаратного комплексу 5 з наступним виводом результатів аналізу на монітор зазначеного програмно-апаратного комплексу 5. Таким чином, корисна модель, яка заявляється, являє собою ортопедичний пристрій, який завдяки підбору конструктивних елементів, а також ефективності їх взаємодії між собою дозволяє забезпечити оптимальне положення людини, яка сидить, і отже, її правильну поставу, який є зручним в експлуатації, дозволяє відслідковувати положення людини, яка сидить, в реальному часі і складати статистику положення за визначений проміжок часу, а також наділений функцією оздоровчого впливу на організм людини. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 1. Ортопедичний пристрій, що містить поверхню для сидіння і систему контролю положення тіла, яка включає щонайменше один датчик і блок керування, який містить мікропроцесор, пристрій подачі сигналу і джерело живлення, електрично з'єднані між собою, при цьому датчик виконаний з можливістю передачі даних про положення тіла на мікропроцесор, який відрізняється тим, що блок керування підключений до програмно-апаратного комплексу, виконаного з можливістю керування мікропроцесором, одержання від нього даних, переданих щонайменше одним датчиком, і аналізу отриманих даних. 2. Ортопедичний пристрій за п. 1, який відрізняється тим, що датчик являє собою елемент, вибраний з групи, що включає ємнісний датчик, тензометричний датчик. 3. Ортопедичний пристрій за п. 1, який відрізняється тим, що програмно-апаратний комплекс являє собою персональний комп'ютер, який включає монітор, із установленою на ньому програмою керування мікропроцесором. 4. Ортопедичний пристрій за п. 1, який відрізняється тим, що блок керування підключений до програмно-апаратного комплексу за допомогою провідного і/або безпровідного зв'язку. 5. Ортопедичний пристрій за п. 1, який відрізняється тим, що сигнал являє собою один з сигналів, вибраних із групи, що включає звуковий сигнал, світловий сигнал, вібраційний сигнал. 6. Ортопедичний пристрій за п. 3, який відрізняється тим, що програма керування мікропроцесором виконана з можливістю виводу на монітор мультимедійних інформаційних повідомлень. 7. Ортопедичний пристрій за п. 1, який відрізняється тим, що джерело живлення являє собою щонайменше один елемент, вибраний із групи, яка включає акумулятор і гальванічний елемент. 8. Ортопедичний пристрій за п. 1, який відрізняється тим, що джерело живлення виконане з можливістю щонайменше часткової підзарядки при підключенні до програмно-апаратного комплексу. 9. Ортопедичний пристрій за п. 1, який відрізняється тим, що додатково містить засіб магнітотерапії. 3 UA 70019 U 4 UA 70019 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюProsthetic device
Автори англійськоюButkevych Oleksandr Yuriovych
Назва патенту російськоюОртопедическое устройство
Автори російськоюБуткевич Александр Юриевич
МПК / Мітки
МПК: A61F 5/00
Мітки: пристрій, ортопедичний
Код посилання
<a href="https://ua.patents.su/7-70019-ortopedichnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Ортопедичний пристрій</a>
Ортопедичний пристрій
Номер патенту: 2093
Опубліковано: 15.10.2003
Автори: Хвісюк Олексій Миколайович, Диннік Олексій Артемович, Диннік Артем Олексійович, Хвисюк Микола Іванович
МПК: A61F 5/04
Мітки: ортопедичний, пристрій
Формула / Реферат:
Ортопедичний пристрій, що містить опорний елемент, головотримач та механізм регулювання, який відрізняється тим, що головотримач виконаний за формою голови у вигляді роз'ємного металевого обруча з упорами, розташованими на його передньо-внутрішній та задньо-внутрішній поверхні, опорний елемент виконаний у вигляді заднього півкорсета з можливістю стягування спереду ременями, головотримач та опорний елемент з'єднані за допомогою механізму...
Пристрій ортопедичний “данстеф”
Номер патенту: 35359
Опубліковано: 15.03.2001
Автор: Гофельд Олександр Матвійович
МПК: A61H 1/00, A63B 22/06
Мітки: пристрій, ортопедичний, данстеф
Формула / Реферат:
Пристрій ортопедичний, що має установлену на основі амортизуючу опору-сидіння та установлену на стійці амортизуючу опору для гомілок та колінних суглобів, який відрізняється тим, що має дві амортизуючі опори-сидіння, кожна з яких установлена на основі за допомогою телескопічного механізму та механізму переміщення та зміни кута нахилу та дві амортизуючі опори для гомілок та колінних суглобів, кожна з яких установлена на стійці за допомогою...
Ортопедичний пристрій для ортезування суглобів кінцівок людини
Номер патенту: 51889
Опубліковано: 10.08.2010
Автори: Авдєєв Анатолій Миколайович, Кулик Анатолій Дмитрович, Бойко Ігор Васильович, Григор'єв Сергій Васильович, Бражнікова Галина Єгорівна
МПК: A61F 5/01, A61B 17/56
Мітки: людини, ортопедичний, суглобів, ортезування, кінцівок, пристрій
Формула / Реферат:
Ортопедичний пристрій для ортезування суглобів кінцівок людини, що включає два ложементи, з'єднаних між собою двома шарнірами за допомогою рейок, який відрізняється тим, що щонайменше один із шарнірів пристрою містить зубчаті диски, жорстко зв'язані з рейками ложементів, а між собою ці диски зв'язані зубцями та віссю, яка одним кінцем жорстко зв'язана з рейкою одного ложемента і шарнірно - з рейкою другого ложемента, а на другому кінці ця...
Ортопедичний кутомір
Номер патенту: 44643
Опубліковано: 15.02.2002
Автор: Шевчук Сергій Вікторович
МПК: A61B 5/103
Мітки: кутомір, ортопедичний
Формула / Реферат:
Ортопедичний кутомір, що включає корпус, дугову шкалу, покажчик у вигляді кульки, розміщеної в замкнутому каналі корпусу та фіксатор, який відрізняється тим, що тильна поверхня і поверхня зовнішнього периметру корпусу покриті липкою тканиною.
Ортопедичний пристрій для корекції поперекового відділу хребта

Номер патенту: 2751
Опубліковано: 16.08.2004
Автори: Стельмах Ігор Миколайович, Ничик Андрій Зіновійович
МПК: A61H 5/00
Мітки: пристрій, корекції, поперекового, хребта, відділу, ортопедичний
Формула / Реферат:
1. Ортопедичний пристрій для корекції поперекового відділу хребта і профілактики його деформації, який складається з опорного елемента і пристроїв фіксації, який відрізняється тим, що опорний елемент виконано у вигляді валика у формі випуклого до переду і зрізаного ззаду у фронтальній площині сегмента, а пристрої фіксації виконані у вигляді ременів з еластично-пружного матеріалу.2. Ортопедичний пристрій за п. 1, який відрізняється тим,...
Попередній патент: Стригальна машинка ротаційного типу
Наступний патент: Спосіб одержання барію сульфату з відходів
Випадковий патент: Медгерм - біологічно активна гепатопротекторна речовина