Пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп’ютерного управлін
Формула / Реферат
Пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного управління, що містить вертикальний корпус операційного стола з можливістю зміни висоти, який позиційно розташований в підставі вертикального корпусу, яка закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми ребрами жорсткості, усередині якого зафіксована нижня частина вертикального корпусу, виконаного у вигляді двох співвісних циліндрів: зовнішнього і внутрішнього, з можливістю поворотно-поступального зсуву внутрішнього циліндра корпусу щодо зовнішнього циліндра корпусу за допомогою лінійного приводу, а також включає додатковий вертикальний корпус з кришкою і привід для її розвороту, до якої під кутом 120° зафіксовані три підйомних пристрої індивідуального підйому корпусів з сферичною зовнішньою поверхнею з діагностичними і хірургічними елементами, який відрізняється тим, що пристрій індивідуального підйому корпусів з сферичною зовнішньою поверхнею виконаний з двох зміщених один щодо одного додаткових циліндрів, між якими розташовані напрямні у вигляді двох напівкруглих планок з пазами, зміщеними один щодо одного по висоті додаткових циліндрів, в яких розташовані подовжні напрямні, при цьому напівкруглі планки закріплені з внутрішньої сторони зовнішнього додаткового циліндра з боку фіксації його з кришкою вертикального корпусу, а подовжні напрямні закріплені із зовнішнього боку внутрішнього додаткових циліндрів в зоні зсуву першого і другого додаткового циліндра і зміщені один щодо одного на його поверхні, при цьому у верхній частині з внутрішньої сторони внутрішнього додаткового циліндра закріплена нижня частина корпусу зі сферичною зовнішньою поверхнею і вставна шайба з осьовим отвором для фіксації висувної частини додаткового лінійного приводу, нижня частина корпусу якого зафіксована на вставній шайбі зовнішнього додаткового циліндра і закріплена усередині його нижньої частини.
Текст
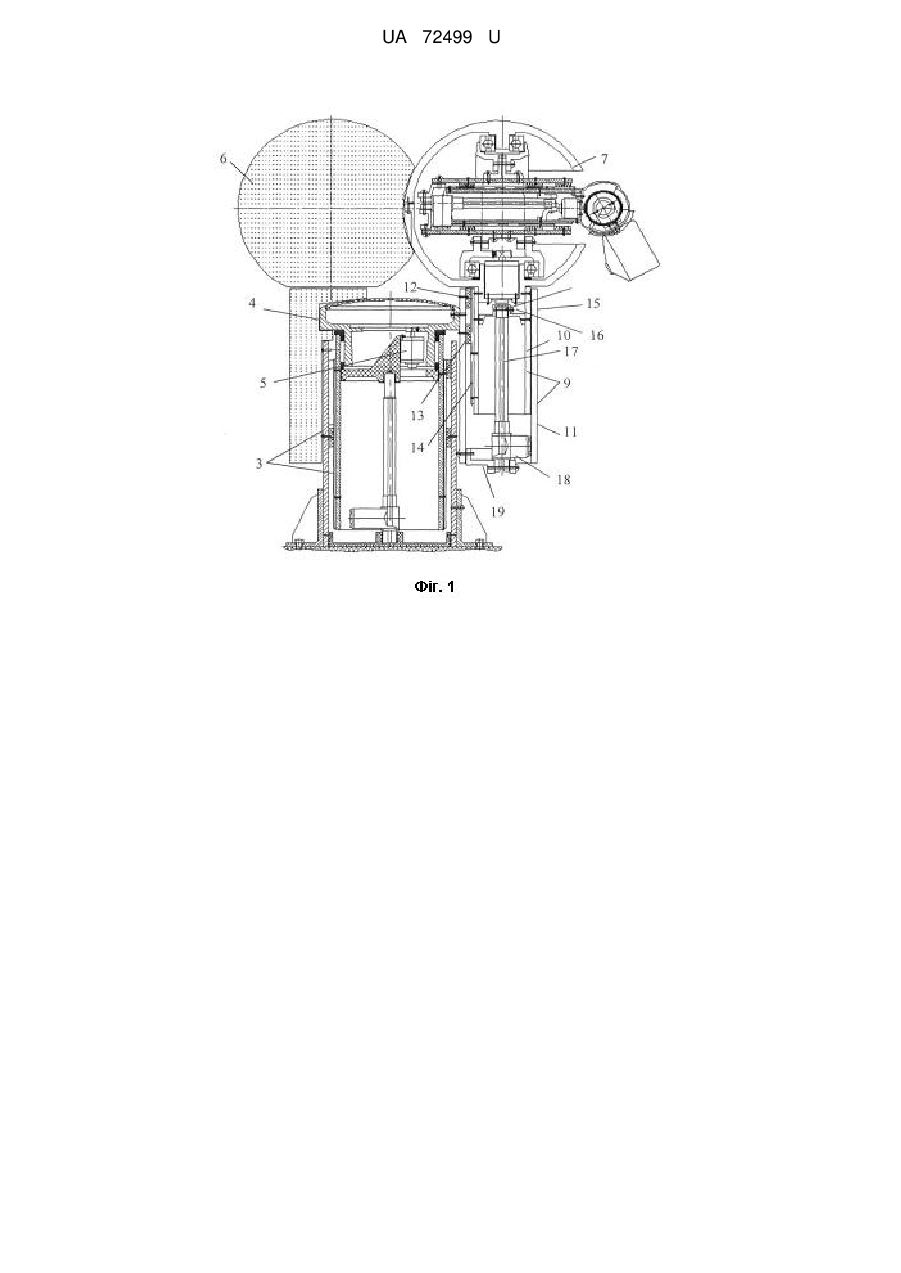
Реферат: Пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційнокомп'ютерного управління містить вертикальний корпус операційного стола, який розташований в підставі вертикального корпусу, яка виконана у вигляді циліндра, усередині якого зафіксована нижня частина вертикального корпусу, виконаного у вигляді двох співвісних циліндрів: зовнішнього і внутрішнього. Пристрій включає додатковий вертикальний корпус з кришкою і привід для її розвороту, до якої зафіксовані три підйомних пристрої індивідуального підйому корпусів. Пристрій індивідуального підйому корпусів виконаний з двох зміщених один щодо одного додаткових циліндрів, між якими розташовані напрямні у вигляді двох напівкруглих планок з пазами. У верхній частині з внутрішньої сторони внутрішнього додаткового циліндра закріплена нижня частина корпусу зі сферичною зовнішньою поверхнею і вставна шайба. UA 72499 U (54) ПРИСТРІЙ ІНДИВІДУАЛЬНОГО ПІДЙОМУ ДІАГНОСТИЧНИХ І ХІРУРГІЧНИХ ЕЛЕМЕНТІВ В БАГАТОФУНКЦІОНАЛЬНІЙ ДІАГНОСТИКО-ХІРУРГІЧНОЇ РОБОТОТЕХНІЧНІЙ СИСТЕМІ ОПЕРАЦІЙНОГО СТОЛА З МОЖЛИВІСТЮ ІНФОРМАЦІЙНО-КОМП'ЮТЕРНОГО УПРАВЛІННЯ ІМ. Ю.І. РУСАНОВА UA 72499 U UA 72499 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до медичної техніки і може бути використана в робототехнічній системі при виконанні різних медичних процедур. Відомий пристрій затиску (див. патент RU № 2371305), який включає обойму, виконану з можливістю поступального переміщення, пружні елементи, виконані у вигляді пружної стрічки з перегинами і прикріплені до обойми, приводний елемент зі штоком і стрижнем, що несе. Захоплення забезпечене жорсткою планкою з шарніром в середній частині, при цьому пружні елементи прикріплені до обойми одним кінцем, а іншим, у вигляді внутрішніх перегинів пружних елементів, - до жорсткої планки. При цьому стрижень, що несе, скріплений з шарніром жорсткої планки. Недоліком відомого пристрою затиску є обмеження його функціональних можливостей, оскільки він призначений для вирішення конкретної задачі і не може бути застосований в робототехнічній системі з комп'ютерним управлінням для орієнтованого прийому хірургічних інструментів і діагностичних пристроїв з подальшим зворотно-поступальним розворотом для проведення як хірургічних, так і діагностичних процедур. Відомий також пристрій вертикального переміщення багатофункціонального діагностикохірургічної операційного стола з можливістю інформаційно-комп'ютерного управління (див. № 16877.ЗУ.11 AU от 10.08.2011), що включає вертикальний корпус стола з можливістю зміни висоти, який позиційно розташований в його підставі, при цьому підстава стола закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми ребрами жорсткості, усередині якого зафіксована нижня частина вертикального корпусу, виконаного у вигляді двох співвісних циліндрів, зовнішнього і внутрішнього, з можливістю поворотно-поступального зсуву внутрішнього циліндра, між якими розташовані напрямні у вигляді двох послідовних кілець з напівкруглими пазами, в яких розташовані подовжні напрямні, закріплені на внутрішній поверхні зовнішнього циліндра і зовнішній поверхні внутрішнього циліндра, при цьому в нижній частині зовнішнього циліндра і на відстані від верхньої частини внутрішнього циліндра зафіксовані вставні шайби, на протилежних сторонах яких виконані круглі пази, між якими розташований лінійний привід поворотно-поступального переміщення внутрішнього циліндра щодо зовнішнього нерухомого циліндра (найближчий аналог). Недоліком відомого пристрою є функціональна не можливість поєднання з робототехнічної системою інформаційнокомп'ютерного управління. Ставиться задача удосконалення пристрою для орієнтованого прийому і подвійного зворотно-поступального розвороту хірургічних інструментів і діагностичних пристроїв, функціонально пов'язаних з операційним столом з комп'ютерним управлінням. Вирішується поставлена задача тим, що пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного управління, що містить вертикальний корпус операційного стола з можливістю зміни висоти, який позиційно розташований в підставі вертикального корпусу, яка закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми ребрами жорсткості, усередині якого зафіксована нижня частина вертикального корпусу, виконаного у вигляді двох співвісних циліндрів: зовнішнього і внутрішнього, з можливістю поворотно-поступального зсуву внутрішнього циліндра корпусу щодо зовнішнього циліндра корпусу за допомогою лінійного приводу, а також включає додатковий вертикальний корпус з кришкою і привід для її розвороту, до якої під кутом 120° зафіксовані три підйомних пристрої індивідуального підйому корпусів з сферичною зовнішньою поверхнею з діагностичними і хірургічними елементами, при цьому пристрій індивідуального підйому корпусів з сферичною зовнішньою поверхнею виконаний з двох зміщених один щодо одного додаткових циліндрів, між якими розташовані напрямні у вигляді двох напівкруглих планок з пазами, зміщеними один щодо одного по висоті додаткових циліндрів, в яких розташовані подовжні напрямні, при цьому напівкруглі планки закріплені з внутрішньої сторони зовнішнього додаткового циліндра з боку фіксації його з кришкою вертикального корпусу, а подовжні напрямні закріплені із зовнішнього боку внутрішнього додаткових циліндрів в зоні зсуву першого і другого додаткового циліндра і зміщені один щодо одного на його поверхні, при цьому у верхній частині з внутрішньої сторони внутрішнього додаткового циліндра закріплена нижня частина корпусу зі сферичною зовнішньою поверхнею і вставна шайба з осьовим отвором для фіксації висувної частини додаткового лінійного приводу, нижня частина корпусу якого зафіксована на вставній шайбі зовнішнього додаткового циліндра і закріплена усередині його нижньої частини. На фіг. 1 зображений пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного управління. На фіг. 2 і 3 зображено позиційне положення трьох корпусів із зовнішньою сферичною поверхнею для діагностичних і хірургічних 1 UA 72499 U 5 10 15 20 25 30 35 40 45 50 елементів з можливістю розвороту і операційний стіл з можливістю горизонтального переміщення. Пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного управління включає (фіг. 2) вертикальний корпус 1 хірургічного стола 2 з можливістю зміни висоти. А також включає додатковий вертикальний корпус 3 з кришкою 4 і привід з редуктором 5 для її розвороту, до якої під кутом 120° зафіксовані три підйомних пристрої 6, 7 і 8 індивідуального підйому корпусів зі сферичною зовнішньою поверхнею з діагностичними і хірургічними елементами, при цьому пристрій індивідуального підйому 9 корпусів 6, 7 і 8 зі сферичною зовнішньою поверхнею виконано з двох зміщених один щодо одного додаткових циліндрів 10 і 11, між якими розташовані напрямні у вигляді двох напівкруглих планок 12 і 13 з пазами, зміщеними один щодо одного по висоті додаткових циліндрів 10 і 11, в яких розташовані подовжні напрямні 14. При цьому напівкруглі планки 12 і 13 закріплені з внутрішньої сторони зовнішнього додаткового циліндра 11 з боку фіксації його з кришкою 4, додаткові вертикальні корпуси 3, а подовжні напрямні 14 закріплені із зовнішнього боку внутрішнього додаткового циліндра 10 в зоні зсуву додаткових циліндрів і зміщені на його поверхні один щодо одного, при цьому у верхній частині 15 з внутрішньої сторони внутрішнього додаткового циліндра 10 закріплена нижня частина корпусу 6, 7 і 8 з сферичною зовнішньою поверхнею і вставна шайба 16 з осьовим отвором для фіксації висувної частини додаткового лінійного приводу 17, нижня частина корпусу 18 якого зафіксована на вставній шайбі 19 зовнішнього додаткового циліндра 11 і закріплена усередині його нижньої частини. Пристрій індивідуального підйому діагностичних і хірургічних елементів багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного управління в даного виконання може бути використаний як для проведення хірургічної операції, так і для діагностики. Оскільки хірургічний стіл 2 (фіг. 2 і 3) з можливістю подовжнього переміщення дозволяє виконувати переміщення операційного стола 2 з пацієнтом в позиційне положення розташування трьох корпусів 6, 7 і 8 із зовнішньою сферичною поверхнею для виконання діагностичних 6 і 7 (рентген, УЗД) і хірургічних процедур. При цьому пристрій індивідуального підйому включає додатковий вертикальний корпус 3 з кришкою 4 і привід з редуктором 5 для її розвороту, до якої під кутом 120 зафіксовані три підйомних пристрої 6, 7 і 8 індивідуального підйому корпусів зі сферичною зовнішньою поверхнею з діагностичними і хірургічними елементами. При цьому пристрій індивідуального підйому 9 корпусів 6, 7 і 8 зі сферичною зовнішньою поверхнею виконано з двох зміщених один щодо одного додаткових циліндрів 10 і 11, між якими розташовані напрямні у вигляді двох напівкруглих планок 12 і 13 з пазами зміщеними один щодо одного по висоті додаткових циліндрів 10 і 11, в яких розташовані подовжні напрямні 14. При цьому напівкруглі планки 12 і 13 закріплені з внутрішньої сторони зовнішнього додаткового циліндра 11 з боку фіксації його з кришкою 4, додаткові вертикальні корпуси 3, а подовжні напрямні 14 закріплені із зовнішнього боку внутрішнього додаткового циліндра 10 в зоні зсуву додаткових циліндрів і зміщені на його поверхні один щодо одного. При цьому у верхній частині 15 з внутрішньої сторони внутрішнього додаткового циліндра 10 закріплена нижня частина корпусу 6, 7 і 8 зі сферичною зовнішньою поверхнею і вставна шайба 16 з осьовим отвором для фіксації висувної частини додаткового лінійного приводу 17, нижня частина корпусу 18 якого зафіксована на вставній шайбі 19 зовнішнього додаткового циліндра 11 і закріплена усередині його нижньої частини. Така конструкція робототехнічної системи дозволяє виконувати незалежний підйом трьох пристроїв 6, 7 і 8 (фіг. 2 і 3) індивідуального підйому корпусів зі сферичною зовнішньою поверхнею з діагностичними елементами і хірургічними робототехнічними елементами, а їх розворот реалізується за допомогою кришки додаткового вертикального корпусу 3, на якому закріплений привід 5 для їх розвороту. Використання запропонованого технічного рішення дозволяє розширити функціональні можливості пристрою захоплення хірургічних інструментів і діагностичних пристроїв в діагностико-хірургічних системах операційного стола з можливістю інформаційно-комп'ютерного управління. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційнокомп'ютерного управління, що містить вертикальний корпус операційного стола з можливістю 2 UA 72499 U 5 10 15 20 зміни висоти, який позиційно розташований в підставі вертикального корпусу, яка закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми ребрами жорсткості, усередині якого зафіксована нижня частина вертикального корпусу, виконаного у вигляді двох співвісних циліндрів: зовнішнього і внутрішнього, з можливістю поворотно-поступального зсуву внутрішнього циліндра корпусу щодо зовнішнього циліндра корпусу за допомогою лінійного приводу, а також включає додатковий вертикальний корпус з кришкою і привід для її розвороту, до якої під кутом 120° зафіксовані три підйомних пристрої індивідуального підйому корпусів з сферичною зовнішньою поверхнею з діагностичними і хірургічними елементами, який відрізняється тим, що пристрій індивідуального підйому корпусів з сферичною зовнішньою поверхнею виконаний з двох зміщених один щодо одного додаткових циліндрів, між якими розташовані напрямні у вигляді двох напівкруглих планок з пазами, зміщеними один щодо одного по висоті додаткових циліндрів, в яких розташовані подовжні напрямні, при цьому напівкруглі планки закріплені з внутрішньої сторони зовнішнього додаткового циліндра з боку фіксації його з кришкою вертикального корпусу, а подовжні напрямні закріплені із зовнішнього боку внутрішнього додаткових циліндрів в зоні зсуву першого і другого додаткового циліндра і зміщені один щодо одного на його поверхні, при цьому у верхній частині з внутрішньої сторони внутрішнього додаткового циліндра закріплена нижня частина корпусу зі сферичною зовнішньою поверхнею і вставна шайба з осьовим отвором для фіксації висувної частини додаткового лінійного приводу, нижня частина корпусу якого зафіксована на вставній шайбі зовнішнього додаткового циліндра і закріплена усередині його нижньої частини. 3 UA 72499 U 4 UA 72499 U Комп’ютерна верстка М. Ломалова Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюYu. rusanov appliance for individual lifting of diagnostic and surgical elements in multifunctional diagnostic-and-surgical robotical system of surgical table suitable for information computerized control
Автори англійськоюRusanov Yurii Ivanovych
Назва патенту російськоюУстройство индивидуального подъема диагностических и хирургических элементов в многофункциональной диагностико-хирургической робототехнической системе операционного стола с возможностью информационно-компьютерного управления им. ю.и. русанова
Автори російськоюРусанов Юрий Иванович
МПК / Мітки
МПК: A61B 5/00
Мітки: стола, системі, операційного, хірургічних, робототехнічний, інформаційно-комп'ютерного, багатофункціональний, діагностико-хірургічної, індивідуального, можливістю, елементів, пристрій, діагностичних, підйому, управлін
Код посилання
<a href="https://ua.patents.su/7-72499-pristrijj-individualnogo-pidjjomu-diagnostichnikh-i-khirurgichnikh-elementiv-v-bagatofunkcionalnijj-diagnostiko-khirurgichno-robototekhnichnijj-sistemi-operacijjnogo-stola-z-mozhli.html" target="_blank" rel="follow" title="База патентів України">Пристрій індивідуального підйому діагностичних і хірургічних елементів в багатофункціональній діагностико-хірургічної робототехнічній системі операційного стола з можливістю інформаційно-комп’ютерного управлін</a>
Пристрій підйому діагностичних і хірургічних елементів шляхом розвороту в багатофункціональній робототехнічній системі операційного стола з можливістю інформаційно-комп’ютерного ерування ім. ю.і. русанова
Номер патенту: 72488
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: A61B 19/00, B25J 15/12
Мітки: русанова, системі, підйому, інформаційно-комп'ютерного, діагностичних, хірургічних, операційного, стола, і.м, розвороту, багатофункціональний, ерування, робототехнічний, пристрій, шляхом, ю.і, елементів, можливістю
Формула / Реферат:
Пристрій підйому діагностичних і хірургічних елементів шляхом розвороту в багатофункціональній робототехнічній системі операційного стола з можливістю інформаційно-комп'ютерного керування, що включає вертикальний корпус хірургічного стола з можливістю зміни висоти, який закріплений в нижній його частині до підстави стола, виконаного у вигляді порожнистого циліндра із зовнішніми ребрами жорсткості і нерухомо розташованого на поверхні підлоги,...
Пристрій розвороту діагностичних і хірургічних елементів робототехнічної системи операційного стола з можливістю інформаційно-комп’ютерного управління ім. ю.і. русанова
Номер патенту: 72485
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: B25J 15/12, A61B 19/00
Мітки: операційного, хірургічних, елементів, ю.і, інформаційно-комп'ютерного, розвороту, управління, русанова, робототехнічної, системі, пристрій, стола, діагностичних, і.м, можливістю
Формула / Реферат:
Пристрій розвороту діагностичних і хірургічних елементів робототехнічної системи операційного стола з можливістю інформаційно-комп'ютерного управління, що включає вертикальний корпус хірургічного стола з можливістю зміни висоти, який закріплений в нижній його частині до підстави стола, виконаного у вигляді порожнистого циліндра із зовнішніми ребрами жорсткості і нерухомо розташований на поверхні підлоги, де також розташований пристрій...
Пристрій горизонтального зворотно-поступального розвороту апаратів діагностики після підйому багатофункціональної діагностико-хірургічної робототехнічної системи для операційного стола з можливістю інформаційно
Номер патенту: 72490
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: B25J 15/12, A61B 19/00
Мітки: пристрій, багатофункціональної, апаратів, інформаційної, стола, операційного, підйому, можливістю, горизонтального, зворотно-поступального, системі, діагностики, розвороту, діагностико-хірургічної, робототехнічної
Формула / Реферат:
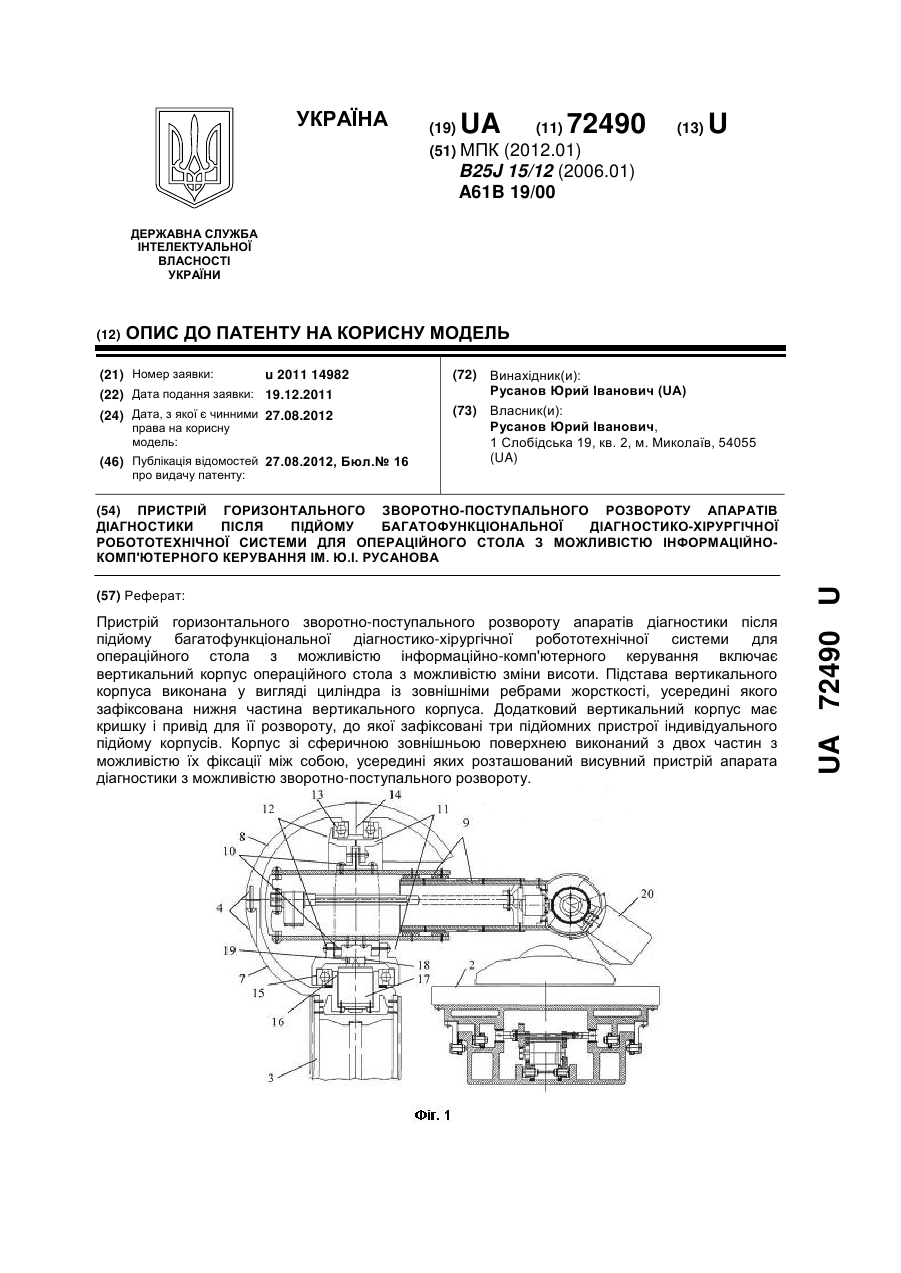
Пристрій горизонтального зворотно-поступального розвороту апаратів діагностики після підйому багатофункціональної діагностико-хірургічної робототехнічної системи для операційного стола з можливістю інформаційно-комп'ютерного керування, що включає вертикальний корпус операційного стола з можливістю зміни висоти, який позиційно розташований в підставі вертикального корпуса, яка закріплена на нерухомій поверхні і виконана у вигляді циліндра із...
Пристрій поворотний поступального розвороту хірургічних елементів багатофункціональної діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп’ютерного керування ім. ю.

Номер патенту: 72493
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: B25J 15/12, A61B 19/00
Мітки: інформаційно-комп'ютерного, можливістю, керування, робототехнічної, системі, поступального, багатофункціональної, пристрій, операційного, хірургічних, і.м, елементів, розвороту, стола, поворотний, діагностико-хірургічної
Формула / Реферат:
Пристрій поворотний поступального розвороту хірургічних елементів багатофункціональної діагностико-хірургічної робототехнічної системи операційного стола з можливістю інформаційно-комп'ютерного керування, що включає корпус із затиском хірургічних елементів за допомогою стрижня, функціонально пов'язаного з приводом зворотно-поступального зсуву, і корпус зсуву затиску, який відрізняється тим, що корпус із затиском хірургічних елементів з...
Пристрій горизонтального переміщення апарата діагностики багатофункціональної діагностико-хірургічної робототехнічної системи для операційного стола з можливістю інформаційно-комп’ютерного управління ім. ю.і.
Номер патенту: 72496
Опубліковано: 27.08.2012
Автор: Русанов Юрий Іванович
МПК: A61B 5/00
Мітки: діагностико-хірургічної, пристрій, багатофункціональної, горизонтального, апарата, діагностики, робототехнічної, і.м, ю.і, управління, стола, переміщення, системі, можливістю, операційного, інформаційно-комп'ютерного
Формула / Реферат:
Пристрій горизонтального переміщення апарата діагностики багатофункціональної діагностико-хірургічної робототехнічної системи для операційного стола з можливістю інформаційно-комп'ютерного управління, що містить вертикальний корпус операційного стола з можливістю зміни висоти, який позиційно розташований в підставі вертикального корпусу, яка закріплена на нерухомій поверхні і виконана у вигляді циліндра із зовнішніми ребрами жорсткості,...
Випадковий патент: Малошумний транзисторний генератор з виходом на третій гармоніці