Пристрій для автоматичного керування електромережею і моторний привід для такого пристрою

Формула / Реферат
1. Пристрій для автоматичного керування електромережею, який містить трансформатор зі ступеневим регулюванням напруги, регулювальна обмотка якого має відводи, і оснащений моторним приводом ступеневий перемикач, виконаний з можливістю безрозривного перемикання відводів регулювальної обмотки під навантаженням, розміщений на трансформаторі зі ступеневим регулюванням напруги вимірювальний перетворювач напруги для реєстрації дійсного значення регульованої напруги, засоби для порівняння виміряного дійсного значення напруги із попередньо заданим значенням, а також засоби для залежного від результату порівняння формування команди керування для залежного від напрямку обертання приведення в дію моторного приводу і, тим самим, ступеневого перемикача, який відрізняється тим, що засоби для порівняння виміряного дійсного значення напруги із попередньо заданим значенням, а також засоби для залежного від результату порівняння формування команди керування розміщені в моторному приводі (13), а вимірювальний перетворювач і моторний привід (13) безпосередньо з'єднані лише одним електричним вимірювальним провідником (12).
2. Пристрій за п. 1, який відрізняється тим, що вимірювальний перетворювач виконаний у вигляді перетворювача напруги (11) з додатковим джерелом енергії для формування вимірювального сигналу.
3. Моторний привід для автоматичного керування електромережею, який містить встановлений в спільному з трансформатором корпусі електродвигун, який через редуктор з'єднаний з привідним валом, у свою чергу, з'єднаний зі ступеневим перемикачем, виконаним зі здатністю безрозривного перемикання відводів обмотки трансформатора, який відрізняється тим, що у спільному корпусі розміщений керуючий блок (17), з'єднаний через узгоджувальний вузол (18) і вимірювальний провідник (12) з вимірювальним перетворювачем, розміщеним поза корпусом, керуючий блок (17) містить засоби для порівняння сформованого вимірювальним перетворювачем, отриманого через вимірювальний провідник (12) вимірювального сигналу з попередньо заданим значенням і формування сигналу регулювання в залежності від результату порівняння і виконаний з можливістю безпосереднього приведення в дію електродвигуна (16) у потрібному напрямку.
4. Моторний привід за п. 3, який відрізняється тим, що вимірювальний перетворювач виконаний у вигляді перетворювача напруги (11) з додатковим джерелом енергії для формування вимірювального сигналу.
5. Моторний привід за пп. 3 або 4, який відрізняється тим, що у спільному з трансформатором корпусі додатково розміщений регулятор (20) реактивної потужності, вхід якого також з'єднаний з розміщеним поза корпусом вимірювальним перетворювачем, а вихід через додатковий реактивний узгоджувальний вузол (19) також з'єднаний з керуючим блоком (17).
6. Моторний привід за пп. 3 - 5, який відрізняється тим, що містить швидкодійний вимірювальний пристрій (23) для реєстрації динамічних провалів напруги, вихід якого через додатковий швидкодійний узгоджувальний вузол (18/1) з'єднаний з керуючим блоком (17).
7. Моторний привід за пп. 3 - 6, який відрізняється тим, що містить керовані керуючим блоком (17) додаткові засоби для швидкого керування мережею, зокрема FACTS-елементи або швидкодійні напівпровідникові ступеневі перемикачі.
Текст
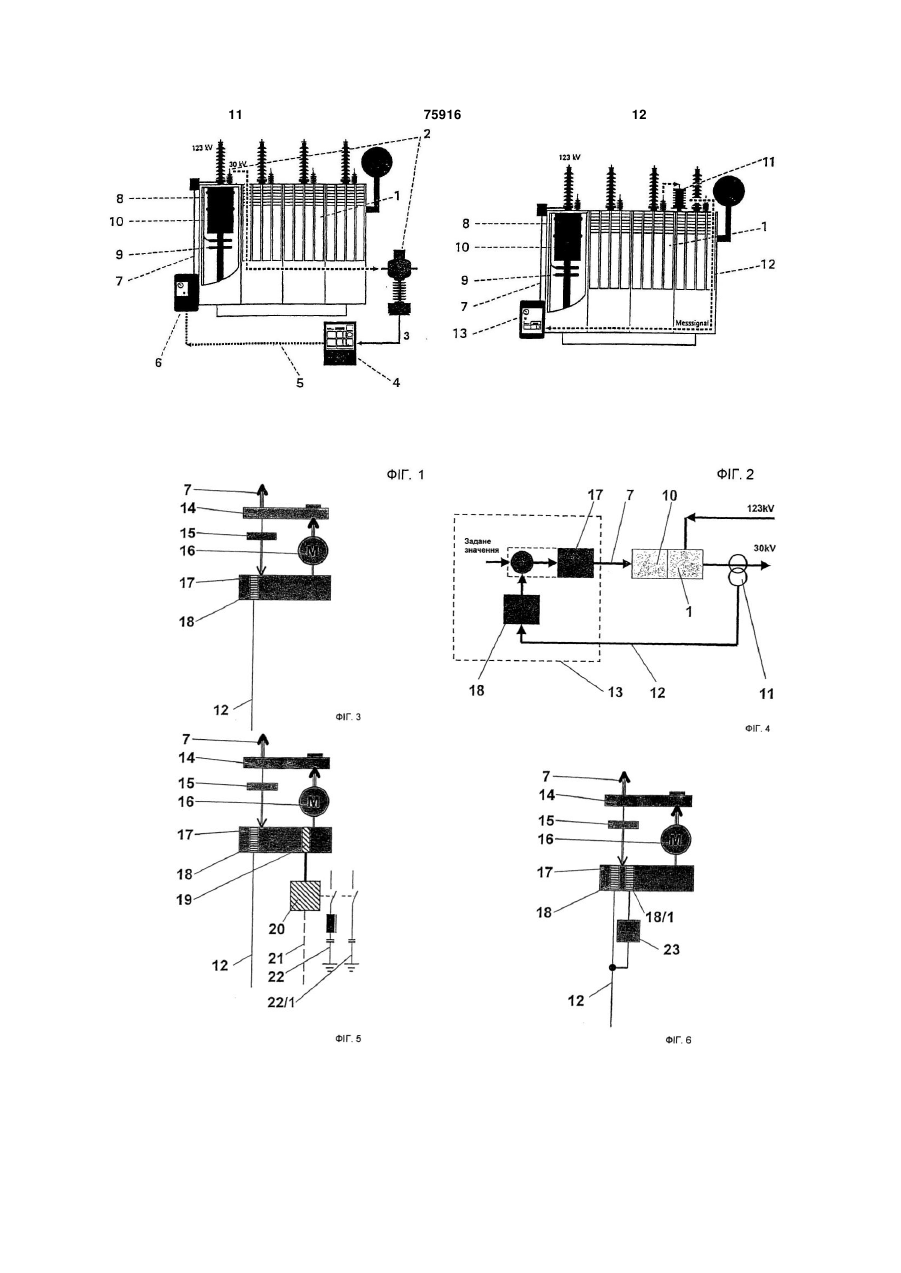
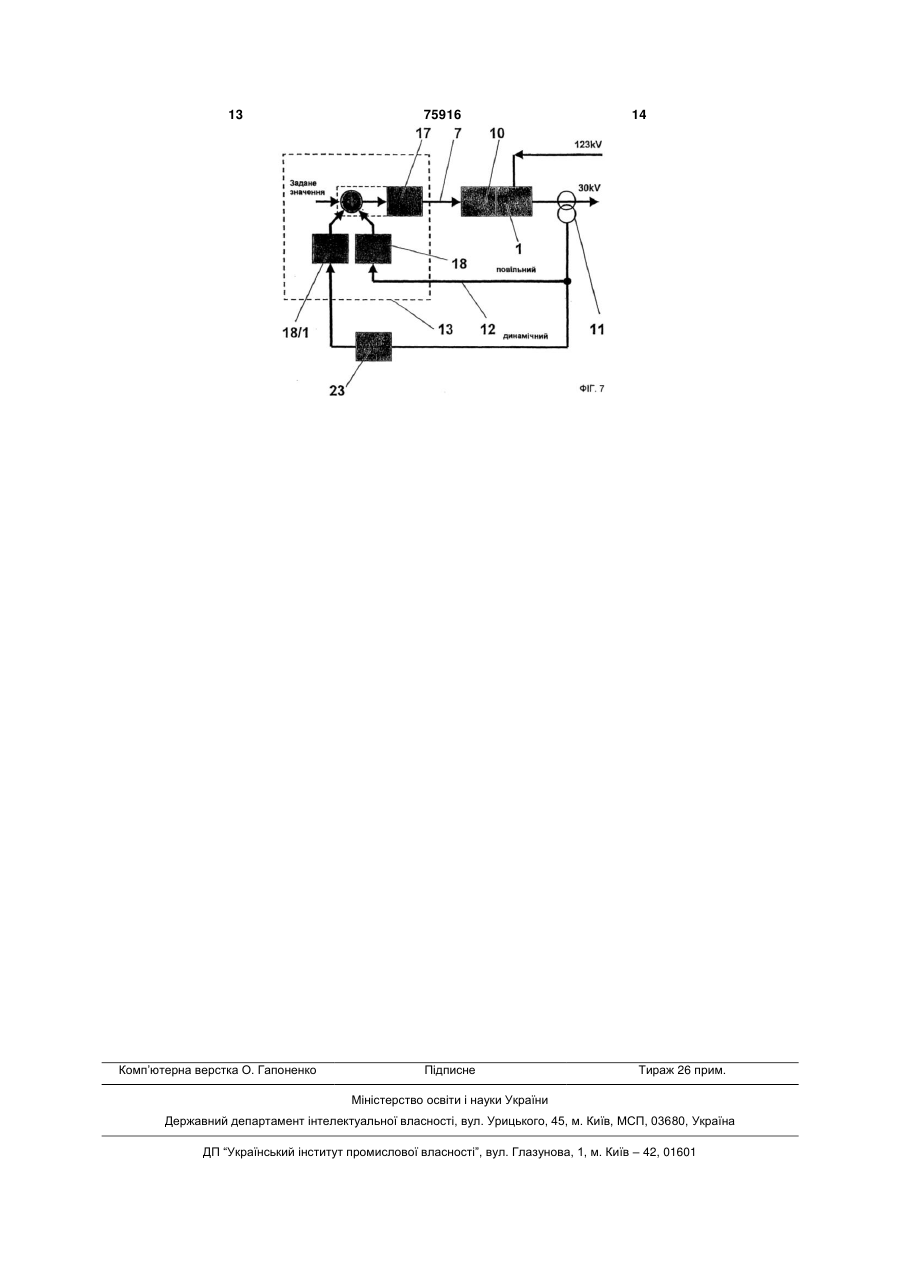
1. Пристрій для автоматичного керування електромережею, який містить трансформатор зі ступеневим регулюванням напруги, регулювальна обмотка якого має відводи, і оснащений моторним приводом ступеневий перемикач, виконаний з можливістю безрозривного перемикання відводів регулювальної обмотки під навантаженням, розміщений на трансформаторі зі ступеневим регулюванням напруги вимірювальний перетворювач напруги для реєстрації дійсного значення регульованої напруги, засоби для порівняння виміряного дійсного значення напруги із попередньо заданим значенням, а також засоби для залежного від результату порівняння формування команди керування для залежного від напрямку обертання приведення в дію моторного приводу і, тим самим, ступеневого перемикача, який відрізняється тим, що засоби для порівняння виміряного дійсного значення напруги із попередньо заданим значенням, а також засоби для залежного від результату порівняння формування команди керування розміщені в моторному приводі (13), а вимірювальний перетворювач і моторний привід (13) безпосередньо з'єднані лише одним електричним вимірювальним провідником (12). 2 (19) 1 3 75916 4 ний узгоджувальний вузол (18/1) з'єднаний з керудодаткові засоби для швидкого керування мереючим блоком (17). жею, зокрема FACTS-елементи або швидкодійні 7. Моторний привід за пп. 3 - 6, який відрізняєтьнапівпровідникові ступеневі перемикачі. ся тим, що містить керовані керуючим блоком (17) Винахід стосується пристрою для автоматичного керування електричними енергопостачальними чи енергорозподільними мережами, називаного в подальшому "керуванням мережею", що містить трансформатор зі ступеневим регулюванням напруги. Винахід стосується також моторного приводу для автоматичного керування мережею за допомогою такого ступеневого трансформатора. Для автоматичного керування мережею використовують зазвичай регульовані потужні трансформатори, які виконані у вигляді ступеневих трансформаторів і мають регулювальну обмотку з різними відводами, безрозривне перемикання між якими здійснюють ступеневим перемикачем за допомогою механічно з'єднаного з ним моторного приводу. Шляхом перемикання між різними відводами регулювальної обмотки здійснюють зміну коефіцієнта трансформації ступеневого трансформатора і, таким чином, регулювання напруги. Відомі пристрої для керування мережею шляхом регулювання напруги складаються зазвичай із багатьох компонентів. По-перше, вони містять вимірювальний перетворювач - переважно встановлений на ступеневому трансформаторі індуктивний вимірювальний трансформатор, який реєструє дійсне значення регульованої напруги. Крім того, передбачений регулятор напруги, розміщений на відстані від ступеневого трансформатора, в головному щиті керування. Регулятор напруги отримує від вимірювального перетворювача через електричні сигнальні провідники електричний сигнал як інформацію про дійсне значення виміряної напруги. В регуляторі напруги це дійсне значення напруги порівнюється з попередньо встановленим заданим значенням напруги, яке за допомогою ступеневого трансформатора має підтримуватися якомога більш сталим, і з урахуванням інших, попередньо заданих параметрів регулювання, наприклад, часу затримки, в разі необхідності формується команда перемикання "вище" чи "нижче". Ця команда перемикання - знову через електричні з'єднувальні провідники - передається на моторний привід ступеневого перемикача. В залежності від напрямку "вище" чи "нижче" переданої команди перемикання моторний привід здійснює обертальне переміщення свого привідного вала; через привідний важільний механізм це обертальне переміщення передається на ступеневий перемикач, який - в залежності від заданого напрямку - здійснює перемикання із задіяного в даний момент відводу обмотки на наступний вищий чи наступний нижчий відвід обмотки. Сам ступеневий перемикач розміщений зазвичай в кожусі ступеневого трансформатора або закріплений на його зовнішній поверхні, так само, як і відповідний моторний привід. Через інші електричні з'єднувальні провідники від моторного приводу на регулятор напруги передається певна інформація, наприклад, поточне положення ступеневого перемикача. Такий пристрій для регулювання напруги відомий із опису винаходу до викладеної заявки DE 2410641. Недоліком цього пристрою є те, що моторний привід має велику кількість електричних виходів, які за допомогою окремих електричних провідників мають бути з'єднані з відповідним регулятором напруги.Потреба в цих провідних з'єднаннях зумовлена тим, що велика кількість інформації, наприклад, про поточне положення ступеневого перемикача, про напрямок і факт обертання привідного вала і т.д., формується електричними чи електромеханічними засобами в моторному приводі, а обробляється у часто віддаленому регуляторі напруги. Інші провідники необхідні, щоб, як уже було пояснено, передати сформовані регулятором напруги команди керування на моторний привід. Зрештою, вимірювальний перетворювач і регулятор напруги також мають бути з'єднані між собою електричними з'єднувальними провідниками. Із опису винаходу до патенту GB 2109960 відомий так званий автотрансформатор, в якому регулятор напруги розміщений безпосередньо на трансформаторі, одначе недоліком його є все ще велика кількість електричних з'єднувальних провідників між регулятором напруги і моторним приводом. Врешті, із DE 4214431 А1 відомий відповідний пристрій, в якому регулятор напруги і моторний привід замість великої кількості окремих провідників з'єднані між собою лише однією єдиною лінією для двосторонньої послідовної передачі даних. Одначе і ця, виконана переважно у вигляді світловода, лінія передачі даних між двома рознесеними у просторі конструктивними вузлами є значним недоліком, до того ж, і в цьому разі неодмінно потрібні додаткові провідники між вимірювальним перетворювачем і регулятором напруги - навіть якщо вони у вказаних публікаціях спеціально і не згадуються. Задачею винаходу є розробка пристрою для автоматичного керування мережею, який усуває недоліки пристроїв рівня техніки, а саме наявність витратного електропровідного чи іншого монтажу між рознесено розміщеними конструктивними вузлами. Задачею винаходу є також розробка моторного приводу, придатного для такого пристрою. Стосовно пристрою задача вирішена тим, що у пристрої для автоматичного керування електромережею, який містить трансформатор, регулювальна обмотка якого має відводи, і оснащений моторним приводом ступеневий перемикач, розміщений на трансформаторі зі ступеневим регулюванням напруги вимірювальний перетворювач напруги для реєстрації дійсного значення регульо 5 75916 6 ваної напруги, засоби для порівняння виміряного пруги, якого немає у вигляді окремого конструктитаким чином дійсного значення напруги із поперевного блока. дньо заданим значенням, а також засоби для заНижче приклади виконання винаходу детальлежного від результату порівняння формування ніше пояснюються з використанням фігур. На них команди керування для залежного від напрямку схематично зображено: обертання приведення в дію моторного приводу, Фіг.1. Пристрій згідно з рівнем техніки відповідно до винаходу засоби для порівняння Фіг.2. Відповідний винаходові пристрій для ревиміряного таким чином дійсного значення напруги гулювання напруги з метою керування мережею із попередньо заданим значенням, а також засоби Фіг.3. Перший приклад виконання відповідного для залежного від результату порівняння формувинаходові моторного приводу вання команди керування розміщені в моторному Фіг.4. Контур регулювання напруги у пристрої з приводі, а вимірювальний перетворювач і мотормоторним приводом згідно з Фіг.3 ний привід безпосередньо з'єднані лише одним Фіг.5. Другий приклад виконання відповідного електричним вимірювальним провідником. винаходові моторного приводу з іншими засобами Стосовно приводу задача вирішена тим, що у для керування мережею моторному приводі для автоматичного керування Фіг.6. Третій приклад виконання відповідного електромережею, який містить встановлений у винаходові моторного приводу з додатковими заспільному з трансформатором корпусі електродвисобами для керування мережею гун, через редуктор з'єднаний з привідним валом, Фіг.7. Контур регулювання напруги у пристрої з у свою чергу з'єднаний зі ступеневим перемикамоторним приводом згідно з Фіг.6. чем, згідно з винаходом у спільному корпусі розСпочатку з використанням Фіг.1 слід коротко міщений керуючий блок, через узгоджувальний пояснити дотеперішній рівень техніки. Пристрій вузол і вимірювальний провідник з'єднаний з вимімістить трансформатор 1, на якому встановлений рювальним перетворювачем, розміщеним поза традиційний вимірювальний трансформатор 2 корпусом, керуючий блок містить засоби для порінапруги, який перетворює дійсне значення напруги вняння сформованого вимірювальним перетворю- наприклад, 30кВ - у вимірювальний сигнал - в вачем, отриманого через вимірювальний провідданому разі 100В. Вимірювальний трансформатор ник вимірювального сигналу з попередньо 2 вимірювальним провідником 3 електрично з'єдзаданим значенням і формування сигналу регулюнаний з регулятором 4 напруги, розміщеним у вання в залежності від результату порівняння, центральному щиті керування. Від регулятора 4 керуючий блок виконаний з можливістю безпосенапруги керуючі провідники 5 ведуть до моторного реднього приведення в дію електродвигуна у потприводу 6. Моторний привід 6 через привідний вал рібному напрямку 7 відомим чином зв'язаний зі ступеневим перемиОсобливою перевагою відповідного винаходокачем 8. Зображений на Фіг.1 ступеневий перемиві пристрою є його компактна конструкція. Згідно з кач 8 містить селектор 9 для попереднього вибору винаходом, пристрій містить пристрій для форму(без втрати енергії) відводу регулювальної обмотвання дійсного значення напруги, переважно пеки і силовий перемикач 10 для власне безрозривретворювач напруги, а особливо переважно - неного перемикання під навантаженням; можливі традиційний перетворювач напруги (який на також інші конструктивні форми ступеневих перевідміну від традиційного перетворювача для Формикачів. Через керуючі провідники 5 з одного боку мування вимірювального сигналу потребує наявпередаються на моторний привід 6 виконавчі коності додаткового джерела живлення), встановлеманди, сформовані регулятором напруги 4 в рений безпосередньо на трансформаторі, зультаті порівняння дійсної напруги і заданої наелектронний моторний привід, який додатково пруги, а, з іншого боку, регулятор напруги 4 містить також електричні і електронні засоби для приймає від моторного приводу 6 інформацію, регулювання напруги з метою керування мережею, наприклад, про поточне положення ступеневого розміщений також безпосередньо на трансформаперемикача і про перемикальні послідовності, виторі і в свою чергу безпосередньо, через звичайконувані при кожному окремому перемиканні відний привідний вал механічно зв'язаний зі ступеневодів обмотки. вим перемикачем, встановленим в На Фіг.2 зображений відповідний винаходові трансформаторі чи на трансформаторі. Таким чипристрій. В ньому на трансформаторі 1 встановном, всі вузли розміщені безпосередньо на транслений нетрадиційний вимірювальний перетворюформаторі; провідний монтаж від і до віднесеного вач 11 напруги, який перетворює дійсне значення у просторі центрального щита керування, в якому напруги - наприклад, 30кВ - у вимірювальний сигзгідно з рівнем техніки розміщений окремий регунал 1,87В. Вимірювальний провідник 12, який лятор напруги у вигляді самостійного приладу чи відповідно до значно слабшого вимірювального всувного блока у 19-дюймовому корпусі, відсутній. сигналу - може відповідати значно простішим виНеобхідний лише один єдиний електричний зв'язок могам, прокладений до електронного моторного від нетрадиційного вимірювального перетворюваприводу 13. Електронний моторний привід 13 доча напруги до електронного моторного приводу. датково оснащений засобами для порівняння заНеобхідний у пристроях згідно з рівнем двостоданого і дійсного значень напруги і для функцій ронній електричний зв'язок між моторним приворегулювання і формування сигналів керування. дом і відокремленим у просторі регулятором наМоторний привід 13 через привідний вал 7 безпопруги повністю відсутній, оскільки, як уже було середньо приводить у дію ступеневий перемикач пояснено, відповідний винаходові електронний 8. Із Фіг.2 видно, що електронний моторний привід моторний привід виконує функції регулятора на13 об'єднує функції зображених на Фіг.1 окремо 7 75916 8 конструктивних вузлів регулятора напруги 4 і моселектора ступеневого перемикача. Центральним торного приводу 6. елементом відповідного винаходові моторного В описі особливо доцільної форми виконання приводу є електронний керуючий блок 17, який винаходу згаданий нетрадиційний вимірювальний містить засоби для порівняння сигналу, отриманоперетворювач 11 напруги. Такі нетрадиційні перего від вимірювального перетворювача напруги, із творювачі набули в останні роки значного розвитку заданим значенням напруги, і в разі виявлення і відомі фахівцеві в численних формах виконання. відхилення, яке перевищує попередньо заданий Всебічний огляд нетрадиційних перетворювачів і поріг, формує команду керування електродвигувимірювальних перетворювачів наведений в докном 16 з метою приведення в дію привідного вала торській дисертації "Вклад у оцінку можливостей 7 ступеневого перемикача 8 у потрібному напрямзастосування нетрадиційних вимірювальних переку. Електронний керуючий блок 17 через узгоджутворювачів і меж витіснення класичних вимірювавальний вузол 18 зв'язаний з описаним вище вильних трансформаторів" ["Ein Beitrag zur мірювальним провідником 12, який передає Beurteilung der Möglichkeiten des Einsatzes інформацію від нетрадиційного перетворювача nichtkonventioneller Messwandler und der Grenzen напруги. für eine Verdrängung klassischer Електронний керуючий блок 17 складається в Messtransformatoren"] доктора Ерміша (Ermisch), основному із програмованого вузла, мікроконтроДрезден, 1984. Загальні вимоги до електронних лера чи промислового комп'ютера. Вибір однієї з перетворювачів напруги нетрадиційного виду витіцих можливостей залежить від багатьох факторів кають із ІЕС 38 (Sec) 122: 1993 або VDE0414. Такі займаної площі, коштів, швидкодії - і може бути нетрадиційні перетворювачі мають найрізноманітздійснений фахівцем. ніші форми виконання; тут слід вказати, наприУзгоджувальний вузол 18 містить аналогоклад, на оптичні перетворювачі, тобто оптоволоцифровий перетворювач та інші засоби для форконні або також об'ємні оптичні перетворювачі, що мування із сигналу, переданого вимірювальним діють за принципом поляризації (ефект Фарадея) провідником 12, сигналу, придатного для обробки чи інтерференції. Крім того, із фірмових матеріалів електронним керуючим блоком 17. Таким чином "Low Power Voltage Transducer for Medium Voltage він є цифровим інтерфейсом для електронного GIS Systems Type LPVTG" і "...Type LoPoVT" фірми керуючого блоку 17, і може бути виконаний у виTrench, Швейцарія, відомі пасивні нетрадиційні гляді польової шини (Fieldbus) або відомого інтерперетворювачі напруги. В Type LoPoVT йдеться фейсу RS 485. про омічний подільник напруги, який заміняє клаНа Фіг.4 ще раз окремо зображений відповідсичні, тобто індуктивні чи ємнісні вимірювальні ний контур регулювання з таким моторним привоперетворювачі. дом. Від нетрадиційного перетворювача 11 напруОгляд омічних подільників напруги у порівнянги вимірювальний сигнал як міра дійсного ні з традиційними перетворювачами напруги навезначення напруги на виході трансформатора 1 дено в журналі etz, номер 15-16/1997, с.20 і настучерез вимірювальний провідник передається до пні. узгоджувального вузла 18 моторного приводу 13, Нетрадиційний перетворювач 11 напруги фопозначеного штриховою лінією. Узгоджувальний рмує вимірювальний сигнал у вольтовому діапазовузол 18 зв'язаний з електронним керуючим блоні, який майже без втрат енергії передається до ком 17, який здійснює порівняння заданого і дійселектронного моторного приводу 13, в якому такий ного значень, тобто порівняння отриманого від сигнал може оброблятися безпосередньо. Для нетрадиційного перетворювача напруги дійсного цього електронний привід 13 містить засоби для значення і попередньо встановленого заданого аналого-цифрового перетворення сигналу перетзначення. Якщо в процесі порівняння виявлено ворювача напруги, щонайменше один визначник відхилення, яке перевищує попередньо заданий положення привідного вала 7, а також вузол елекпоріг регулювання, то формується команда керутронного керування. Вузол електронного керуванвання, яка через електродвигун 16 приводить у ня виконує функції окремого у пристроях рівня дію привідний вал 7. Силовий перемикач 10 ступетехніки регулятора напруги; він здійснює порівнянневого перемикача приводиться в дію і вторинна ня заданого і дійсного значень напруги і - з урахунапруга трансформатора 1 змінюється. Нетрадиванням попередньо заданих параметрів регулюційний перетворювач 11 напруги подає на електвання, таких як затримка перемикання, поріг ронний керуючий блок 17 нове значення виміряної регулювання і т.п. - формує керуючий сигнал, який напруги як сигнал зворотного зв'язку; контур регуслужить для керування електродвигуном, що прилювання замкнувся. водить у дію привідний вал 7 ступеневого перемиВ рамках винаходу можливе також викорискача 8. тання замість нетрадиційного перетворювача 11 Перша форма виконання відповідного винахонапруги іншого вимірювального перетворювача дові електронного моторного приводу детальніше або знімання інформації про дійсне значення напояснюється з використанням Фіг.3. Моторний пруги з системи шин. привід містить редуктор 14 для приведення в дію На Фіг.5 зображена друга форма виконання привідного вала 7 ступеневого перемикача 8. Ревідповідного винаходові моторного приводу. В ній дуктор 14 зменшує швидкість обертання привіднояк додаткова можливість керування мережею пего вала 7 порівняно з валом електродвигуна 16, редбачений аналіз якості напруги, що підлягає який є, як правило, асинхронним двигуном зміннорегулюванню. При цьому вихідна напруга нетраго струму. З редуктором 14 зв'язаний позиційний диційного перетворювача 11 напруги через додатсигнальний пристрій 15 для реєстрації положення ковий вимірювальний провідник 21 подається на 9 75916 10 регулятор 20 реактивної потужності. Зрозуміло, що сталу часу від 10 до 30 хвилин, тому не можуть цей вимірювальний сигнал можна відвести також конфліктувати з регулювальними алгоритмами від і без того наявного вимірювального провідника швидкодійних ступеневих перемикачів. 12. Як регулятор 20 реактивної потужності може Електронний керуючий блок 17 може містити бути використаний виготовлюваний заявником також інші конструктивні вузли для реалізації фунприлад "POCOS-Controf у комерційному виконанні. кцій моніторингу чи для керування встановленими Його вихід через додатковий реактивний узгоджуна трансформаторі 1 вентиляторами. вальний вузол 19 зв'язаний з електронним керуюНа Фіг.6 і 7 представлена особливо доцільна чим блоком 17. Одначе регулятор реактивної поформа виконання винаходу. В ній електронний тужності може бути виконаний також як керуючий блок 17 додатково до вже описаного інтегрована складова електронного керуючого узгоджувального блоку 18 містить ще один додатблока 17. Таким чином, у поєднанні з безпосередковий швидкодійний узгоджувальний блок 18/1, нім регулюванням напруги додатково можна прозв'язаний з додатковим швидкодійним вимірюватидіяти неприпустимому перевищенню напруги льним пристроєм 23. Такий швидкодійний вимірювнаслідок можливої перекомпенсації. Таке, відоме вальний пристрій 23 також виробляється заявниіз літератури як ефект Ферранті (Ferranti), перевиком під назвою "Voltage Dip Meter", в змозі щення напруги на кінці, наприклад, ненавантажерозпізнавати і відпрацьовувати навіть провали ного провідника виникає внаслідок складного співнапруги короткої тривалості з метою керування відношення між напругами на початку і на кінці регульованою вихідною напругою трансформатоцього провідника, причому це співвідношення ра. Таке швидкодійне регулювання напруги для представляє реальну величину. Вхідна і вихідна керування мережею може бути здійснене, напринапруги в цьому разі характеризуються однаковим клад, з використанням відомих швидкодійних поположенням фаз, внаслідок чого ємнісний зарядтужних електронних елементів електромережі, так ний струм на індуктивності провідника створює званих FACTS-елементів (FACTS = Flexible AC напругу, яка додається до вхідної напруги таким Transmission System; гнучка система передачі елечином, що вихідна напруга на цьому провіднику ктроенергії змінного струму). Вони уможливлюють більша, ніж вхідна напруга. Використовуючи різні цілеспрямоване керування активною і реактивною попередньо встановлені задані значення, такі як складовими потужності і активізацію відповідних регулювальних елементів з високими динамічними коефіцієнт потужності Cos чи припустимий вміст параметрами. Для швидкісного відпрацьовування вищих гармонік у вимірюваній напрузі, регулятор коротких провалів напруги придатні також ступе20 реактивної потужності здійснює під'єднання чи неві перемикачі, повністю виконані на тиристорах. від'єднання конденсаторів 22/1 і поглинаючого Такі ступеневі перемикачі відомі, наприклад, із WO контуру 22. За допомогою таких ступенево під'єд95/27931 або WO 97/05536. Керування описаними нуваних компенсаційних елементів також можливе швидкодійними регулювальними вузлами також регулювання напруги і, тим самим, керування меможливе за допомогою відповідного винаходові режею. При цьому ємнісний реактивний струм пристрою для керування мережею. компенсаційного пристрою зумовлює підйом наЗгідно з іншою формою виконання винаходу пруги на переважно індуктивному імпедансі живиможливе також використання електронного керуюльного кінця мережі, якщо згенерована ємнісна чого блока 17 для приведення в дію дугогасної реактивна потужність не призначена виключно для котушки заземлення. Цей принцип гасіння або рекомпенсації індуктивної реактивної потужності гулювання замикання на землю за допомогою дуспоживачів. Цей метод регулювання особливо гогасної котушки відомий фахівцеві. Він базується доцільний тоді, коли спад напруги, зумовлений на тому, що в місці дефекту ємнісна складова змінним споживанням індуктивної реактивної поструму витікання може бути компенсована індуктужності, має підтримуватися сталим. Особливо тивним струмом дугогасної котушки. Завдяки цьодосконала система компенсації такого типу описаму при ідеальній компенсації протікає лише дуже на в WO 94/24622. незначний омічний залишковий струм. При регуМожна також для керування мережею паралелюванні розрізняють два різні методи: по-перше льно використовувати як ступеневий перемикач, регулювання при незначній зворотній дії мережі так і систему компенсації реактивної потужності. навіть при великих значеннях напруги компенсації, При цьому обидва види пристроїв для автоматича по-друге - регулювання при відчутній зворотній ного керування мережею можуть бути активовані дії мережі, тобто змінах в мережі, які впливають на за допомогою відповідного винаходові, описаного напругу компенсації. Власне регулювання здійсвище моторного приводу. В такому разі викориснюють відомим чином шляхом зміни індуктивності товувані регулятори реактивної потужності слудугогасної котушки заземлення. жать лише для грубого регулювання; вони мають 11 75916 12 13 Комп’ютерна верстка О. Гапоненко 75916 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for automatically controlling power supply and a motor drive for the device
Автори англійськоюDonald Dieter
Назва патенту російськоюУстройство для автоматического регулирования напряжения электропитания и электродвигательный привод для устройства
Автори російськоюДональд Дитер
МПК / Мітки
МПК: H01F 29/00, G05F 1/147, H02P 7/18, H02P 13/00
Мітки: привід, пристрій, моторний, пристрою, автоматичного, такого, електромережею, керування
Код посилання
<a href="https://ua.patents.su/7-75916-pristrijj-dlya-avtomatichnogo-keruvannya-elektromerezheyu-i-motornijj-privid-dlya-takogo-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для автоматичного керування електромережею і моторний привід для такого пристрою</a>
Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів чи виробів (парс-тп) та спосіб такого регулювання
Номер патенту: 34060
Опубліковано: 15.04.2003
Автори: Костогриз Кирило Петрович, Костогриз Петро Васильович, Русінковський Олег Юрійович
МПК: F26B 21/06, F26B 25/22, F26B 3/02
Мітки: регулювання, прогартовування, пристрій, сушіння, матеріалів, процесу, спосіб, парс-тп, виробів, такого, автоматичного
Формула / Реферат:
1. Пристрій автоматичного регулювання процесу сушіння і/або прогартовування матеріалів або виробів у сушильному агрегаті, що містить вимірювальні пристрої, кожен з яких виконаний у вигляді, принаймні одного датчика, з’єднаного з елементом порівняння, блок керування, із входами якого з’єднані вимірювальні пристрої, а вихід якого зв'язаний з виконавчим механізмом регулювального органа подачі палива у камеру спалювання, при цьому датчик першого...
Пристрій автоматичного керування регулятором напруги
Номер патенту: 37686
Опубліковано: 15.05.2001
Автори: Фурман Ілля Олександрович, Трунова Ірина Михайлівна, Ремез Віталій Віталійович, Савченко Петро Ілліч
МПК: H02M 5/02
Мітки: пристрій, регулятором, керування, напруги, автоматичного
Текст:
...Сигнал Yij є і вхідним сигналом, що вводиться в мікроконтролер 6 для визначення відповідного заданого оптимального значення напруги живлення електрообладнання даного типового варіанту одночасної його експлуатації, тобто: Yij=Xij. В мікроконтролері 6 здійснюється порівняння значення напруги Uвх на вході регулятора напруги 1 з оптимальним значенням для даного типового варіанту одночасної експлуатації електрообладнання Uопт і з...
Пристрій для автоматичного керування планшетністю штаби прокату
Номер патенту: 14507
Опубліковано: 15.05.2006
Автори: Островерхов Микола Якович, Попович Микола Гаврилович
МПК: B21B 37/00
Мітки: штаби, пристрій, прокату, керування, планшетністю, автоматичного
Формула / Реферат:
Пристрій для автоматичного керування планшетністю штаби прокату, що містить датчик розподілу натягу по ширині штаби, виходи якого по числу зон вимірювання з'єднані з входами блока керування, перетворювачі частоти з рекуперативним гальмуванням, виходи яких з'єднано із входами лінійних асинхронних двигунів, встановлених під штабою відповідно до зон вимірювання натягу, датчик швидкості штаби, який з'єднано з додатковим входом блока керування,...
Розпилювальний пристрій насосної дії і спосіб розпилювання рідини із використанням такого пристрою
Номер патенту: 26668
Опубліковано: 12.11.1999
Автор: Кейтер Міро С.
МПК: B65D 47/34, B05B 7/02, B05B 7/00, B05B 11/00
Мітки: дії, пристрою, спосіб, використанням, розпилювальний, розпилювання, насосної, пристрій, такого, рідини
Формула / Реферат:
1. Распылительное устройство насосного действия, предназначенное для распыления жидкости в виде распыленной струи, содержащее корпус, образованный первым цилиндром, внутри которого установлен с возможностью возвратно-поступательного перемещения первый поршень для формирования первой камеры переменного объема, приспособленной для содержания жидкости для распыления, вторым цилиндром со вторым поршнем для формирования второй камеры переменного...
Пристрій автоматичного керування блокуванням диференціала транспортного засобу
Номер патенту: 4848
Опубліковано: 15.02.2005
Автори: Верба Артем Юрійович, Нікітін Володимир Олександрович, Верба Юрій Валентинович
МПК: B60K 17/00
Мітки: автоматичного, диференціала, засобу, пристрій, транспортного, блокуванням, керування
Формула / Реферат:
Пристрій автоматичного керування блокуванням диференціала транспортного засобу, що містить систему реагування на заданий кут повороту транспортного засобу з датчиком кута повороту, зв'язаним з елементом рульового керування, керуючий елемент, зв'язаний із силовим циліндром муфти блокування диференціала і з джерелом живлення, два тахометричних датчики, зв'язаних з відповідними ведучими колесами транспортного засобу і електрично зв'язані з...
Попередній патент: Датчик динамічного тиску
Наступний патент: Спосіб обробки насіння сільськогосподарсько-активною речовиною, оброблене насіння та спосіб захисту насіння
Випадковий патент: Продувальний блок