Датчик частоти обертання та кута положення
Номер патенту: 77233
Опубліковано: 15.11.2006
Автори: Лінник Євген Васильович, Фотченков Олександр Дмитрович, Бабенко Павло Григорович, Туренко Анатолій Миколайович, Абрамчук Федір Іванович, Манойло Володимир Максимович, Богомолов Віктор Олександрович

Формула / Реферат
Датчик частоти обертання і кута положення, що включає перший формувач вихідних імпульсів, який містить два високочастотних настроєних на близькі частоти релаксаційних LC-генератори, кожний з який виконаний на логічному інвертувальному КМОП-елементі, вхід якого з'єднаний з негативним виводом джерела живлення через перший конденсатор і з його виходом, що є виходом генератора, - через послідовні індукційну котушку і перший резистор, точка з'єднання яких також підключена до негативного виводу джерела живлення через другий конденсатор, а виходи обох генераторів підключені до однойменних входів змішувача частот, вихід якого через Т-подібний фільтр низької частоти, виконаний на другому і третьому резисторах і третьому конденсаторі, з'єднаний із входом компаратора, що містить послідовні другий і третій логічні інвертори, і, через четвертий резистор, - з його виходом, що є виходом першого формувача, який відрізняється тим, що як змішувач частот використано D-тригер, між його виходом і входом Т-подібного фільтра включені додатково послідовні четвертий конденсатор, третій логічний інвертор, вхід якого також з'єднаний з позитивним виходом джерела живлення через додатковий п'ятий резистор, а вихід - через додатковий шостий резистор - із точкою з'єднання резисторів і конденсаторів Т-подібного фільтра, і діод, вихід змішувача також підключений через додатковий шостий конденсатор до другого входу додаткового п'ятого логічного елемента 2І-НІ, вихід якого підключений до другого входу другого інвертора, що одночасно є входом скидання RS-тригера, зібраного з цього п'ятого елемента і другого інвертора, також виконаного на логічному елементі 2І-НІ, перший вхід якого є одночасно входом компаратора і входом установки RS-тригера, а вихід, з'єднаний також з першим входом п'ятого логічного елемента, - виходом RS-тригера, безпосередньо, а до позитивного виводу джерела живлення - через додатковий сьомий резистор, вихід першого формувача є першим виходом імпульсів частоти обертання і кутових імпульсів датчика, а також містить додатковий, виконаний як і перший, другий формувач других вихідних імпульсів нульового відліку датчика, перший і другий виходи датчика з'єднані, відповідно, через додаткові восьмий і дев'ятий резистори з анодом додаткового світлодіода, катод якого підключений до мінуса джерела живлення, при цьому конструкція пристрою також доповнена маркерним диском, вісь якого обертається з частотою, меншою в два рази від частоти обертання колінчастого вала двигуна, об'єднані в пари інформаційні доріжки якого виконані у вигляді концентричних кілець з металевими і діелектричними секторами, що чергуються в кожнім кільці або доріжці і у кожнім секторі пари і мають наступне призначення в порядку убування радіусів кілець: перша і друга доріжки - частота обертання і кутових імпульсів, третя і четверта доріжки - імпульси нульового відліку, кількість однойменних секторів першої чи другої доріжок дорівнює числу циліндрів двигуна, кутова тривалість діелектричних секторів визначає потрібну скважність вихідних імпульсів датчика, початок за ходом обертання диска кожного діелектричного сектора першої доріжки відповідає положенню верхньої мертвої точки поршня даного циліндра, а єдиний діелектричний сектор третьої доріжки, сполучений із сектором першого циліндра, чергується з металевим сектором у цьому ж секторі четвертої доріжки, крім того, індукційні котушки всіх чотирьох LC-генераторів виконані однаково мініатюрними плоскими і без сердечників, але в кожнім формувачі одна котушка містить на кілька витків більше ніж інша, причому усі котушки вмонтовані в отвори в друкованій платі врівень з її поверхнею, протилежною тій, на якій поверхневим монтажем зібрана з чип-елементів схема формувачів, плата повернена індукційними котушками до інформаційних доріжок маркерного диска і зафіксована паралельно його поверхні з зазором, котушки на платі виставлені в один ряд уздовж радіуса маркерного диска так, що їхні осі намотування віддалені від центра обертання маркерного диска на величину середнього радіуса кожної інформаційної доріжки, відповідно, а котушки з більшою кількістю витків встановлені проти першої і третьої доріжок.
Текст
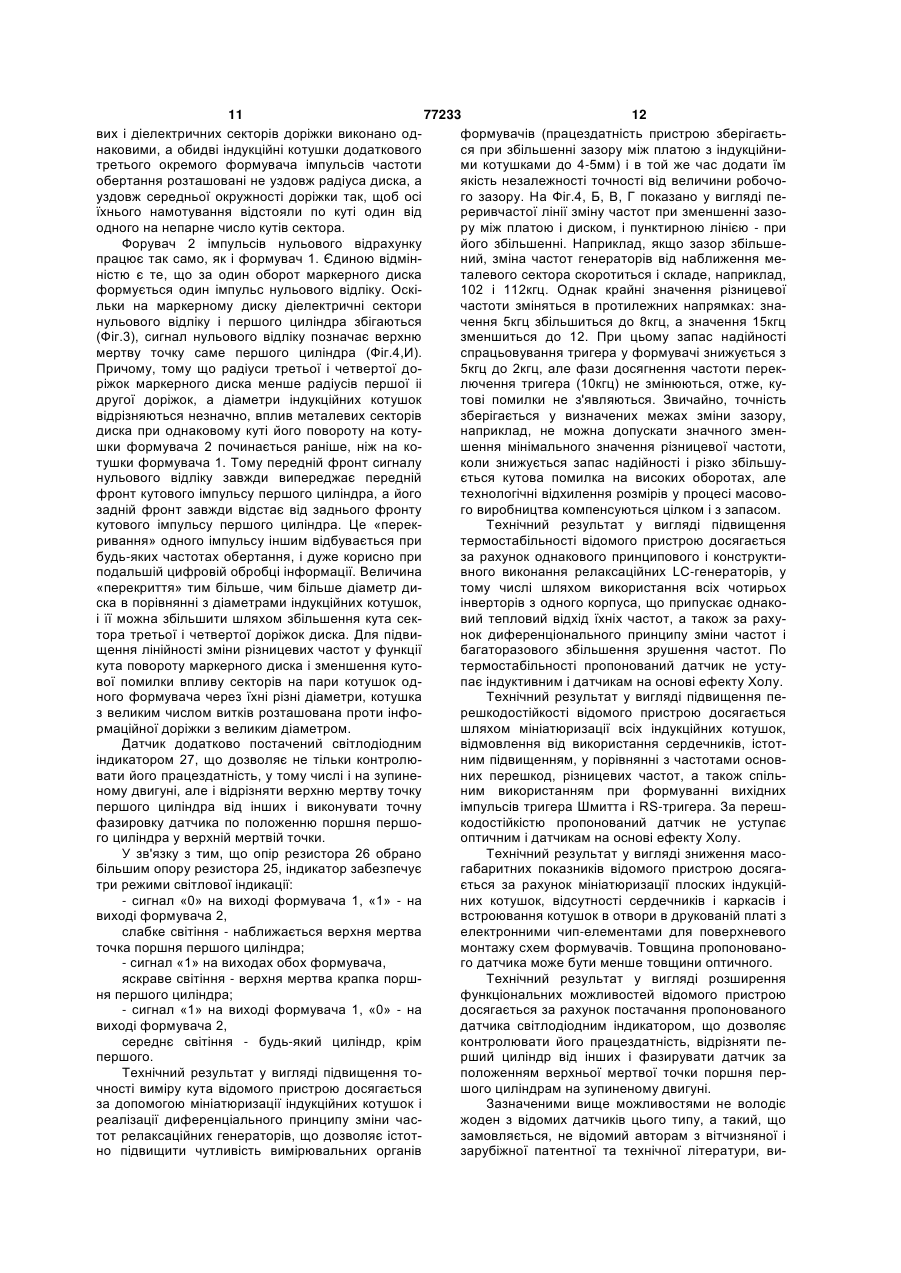
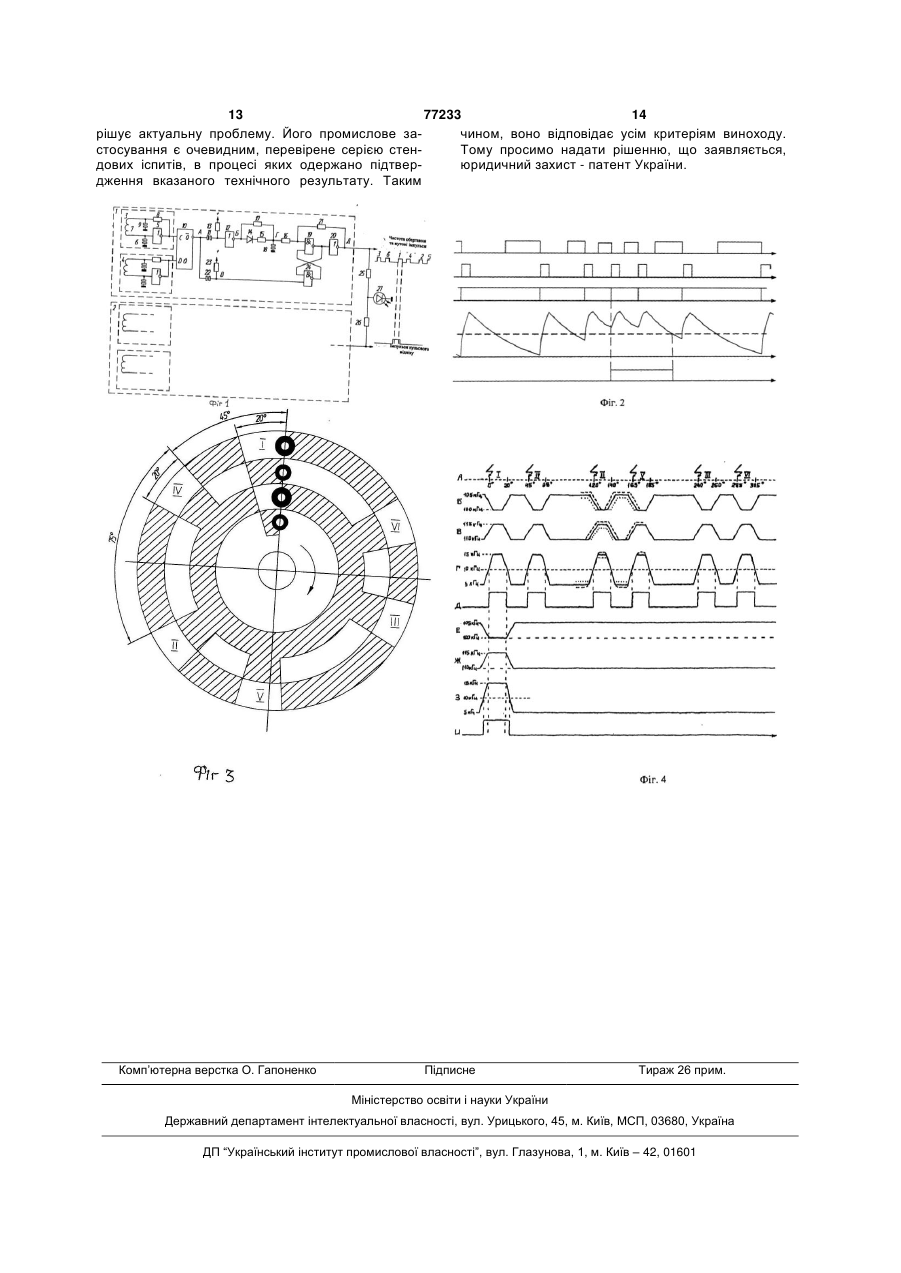
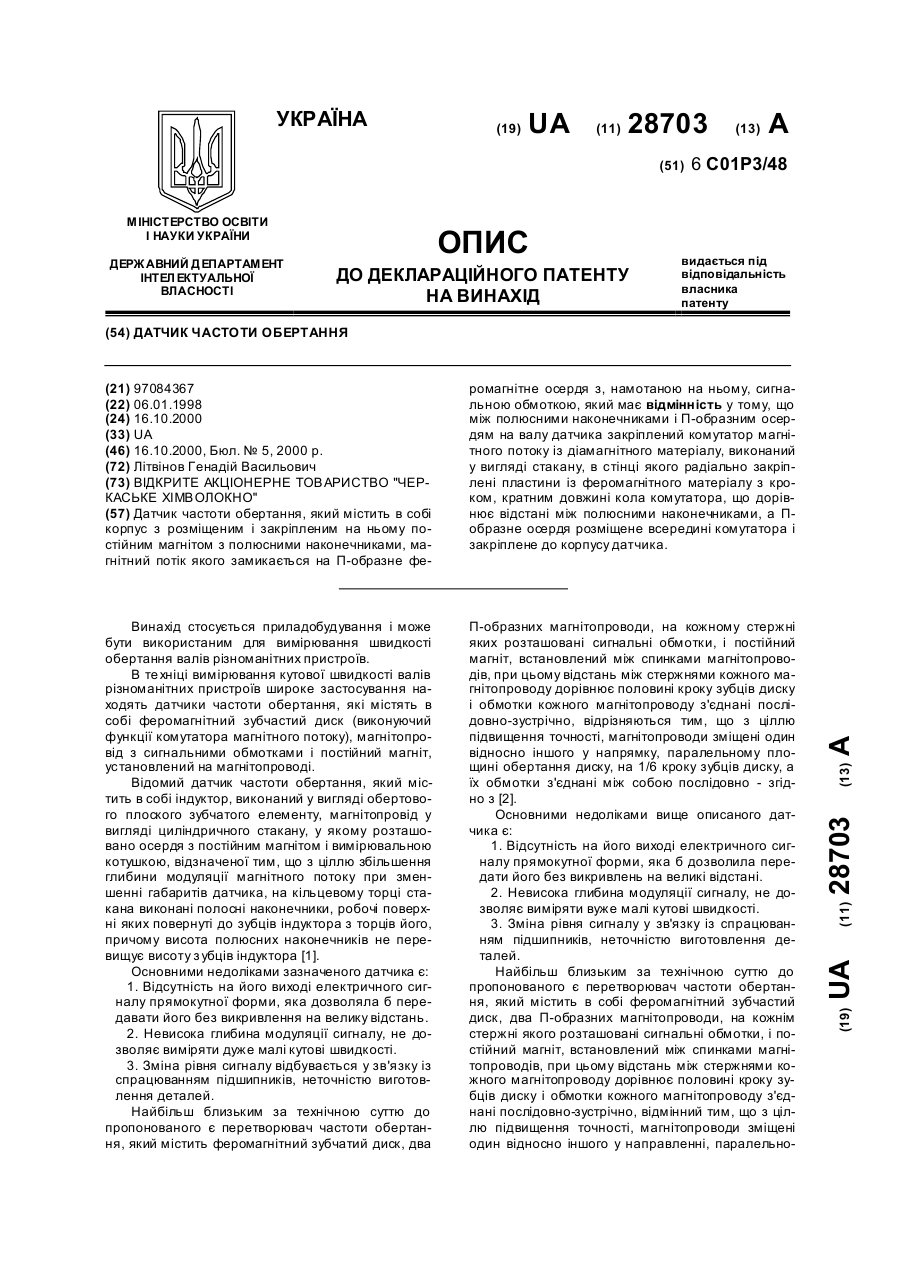
Датчик частоти обертання і кута положення, що включає перший формувач вихідних імпульсів, який містить два високочастотних настроєних на близькі частоти релаксаційних LC-генератори, кожний з який виконаний на логічному інвертувальному КМОП-елементі, вхід якого з'єднаний з негативним виводом джерела живлення через перший конденсатор і з його виходом, що є виходом генератора, - через послідовні індукційну котушку і перший резистор, точка з'єднання яких також підключена до негативного виводу джерела живлення через другий конденсатор, а виходи обох генераторів підключені до однойменних входів змішувача частот, вихід якого через Т-подібний фільтр низької частоти, виконаний на другому і третьому резисторах і третьому конденсаторі, з'єднаний із входом компаратора, що містить послідовні другий і третій логічні інвертори, і, через четвертий резистор, - з його виходом, що є виходом першого формувача, який відрізняється тим, що як змішувач частот використано D-тригер, між його виходом і входом Т-подібного фільтра включені додатково послідовні четвертий конденсатор, третій логічний інвертор, вхід якого також з'єднаний з позитивним виходом джерела живлення через додатковий п'ятий резистор, а вихід - через додатковий шостий резистор - із точкою з'єднання 2 (19) 1 3 77233 4 інша, причому усі котушки вмонтовані в отвори в лені в один ряд уздовж радіуса маркерного диска друкованій платі врівень з її поверхнею, протилетак, що їхні осі намотування віддалені від центра жною тій, на якій поверхневим монтажем зібрана з обертання маркерного диска на величину середчип-елементів схема формувачів, плата поверненього радіуса кожної інформаційної доріжки, відна індукційними котушками до інформаційних доповідно, а котушки з більшою кількістю витків ріжок маркерного диска і зафіксована паралельно встановлені проти першої і третьої доріжок. його поверхні з зазором, котушки на платі вистав Винахід відноситься до індуктивних датчиків переміщення, наближення, кінцевого положення, кута повороту, частоти обертання і може бути реалізовано, наприклад, як датчик моменту і кутової тривалості іскроутворення систем запалювання високої енергії автомобільних і інших двигунів внутрішнього згоряння, зокрема, могутніх багатоциліндрових газових двигунів, а також конвертованих у газові двигуни дизелів, у яких ці датчики сполучаються з приводним валом не використовуваного паливного насоса високого тиску. Відомий індуктивний магнітоелектричний датчик частоти обертання і положення колінчастого вала двигуна внутрішнього згоряння (1), що містить дві індукційні котушки із сердечниками у вигляді постійних магнітів і два ротори (чи маркерних диска) із зубцями, установлених на одній осі, до зубців яких звернені полюси постійних магнітів, розташованих у площинах роторів з невеликим зазором щодо зубців. При переміщенні зубців щодо магнітів величина зазору між ними змінюється, викликаючи зміну магнітної індукції і появу в індукційних котушка двополярних імпульсів, симетричних щодо нульової точки, що відповідає центру кожного зубця, що дозволяє за допомогою одного ротора, який містить два діаметрально протилежних зубці, визначати кутове положення колінчастого вала двигуна, а за допомогою іншого, утримуючого 24 зубця та одержувати інформацію про частоту його обертання. Для такого датчика характерні простота, високі надійність, термостабільність, прийнятна точність на середніх і великих оборотах, а також несприйнятливість до вологи, масла і бруду. Недоліками датчика є: - невелика чутливість, через що величина зазору між сердечниками і зубцями не повинна перевищувати 1,0мм; - завищені масо-габаритні показники через низьку частоту робочих процесів, великої кількості витків індукційних котушок, наявності сердечників і другого ротора; - низька перешкодозахищеність, оскільки індукційна котушка з великою кількістю витків є ідеальним приймачем електромагнітних перешкод, у тому числі низькочастотних, що найбільше важко піддаються пригнічуванню, що приводить до надлишкового ускладнення електронної схеми обробки сигналів датчика, особливо при спільній роботі з електронною багатоіскровою високочастотною системою запалювання високої енергії; - генерація разом з корисними сигналами паразитних низькочастотних гармонік, що виникають через порівнянні по амплітуді з величиною зазору аксіальних і радіальних биттів зубцюватих роторів, засоби пригнічування яких також ускладнюють електронну схему; - низька точність вимірювання кутів в області малих обертів через зменшення амплітуди вихідного сигналу, що приводить до появи надлишкового випередження запалювання при малих частотах обертання і надлишкового запізнювання при великих, що вимагає вживання спеціальних заходів по додатковій корекції інформації про кут положення; - повна непрацездатність при зупиненому двигуні, оскільки прийнятна амплітуда вихідних сигналів датчика з'являється тільки після деякої частоти обертання його роторів, що обмежує функціональні можливості датчика і не дозволяє виконувати такі важливі операції, як перевірка працездатності датчика до запуску двигуна і його фазіровка по положенню у верхній мертвій точці поршня першого циліндра на зупиненому двигуні; - функціональні можливості датчика обмежені, тому що він, сам по собі, визначає тільки момент іскроутворення і не може без залучення зовнішнього обчислювального ресурсу формувати сигнали визначеної скважності, необхідні, наприклад, для безпосереднього керування сучасною транзисторною системою запалювання з нормуванням часу накопичення енергії, чи для завдання кутової тривалості іскрового розряду у свічах запалювання у випадку керування багатоіскровою високочастотною системою запалювання високої енергії. Більш високою чутливістю (робочий зазор до 3,0мм для діамагнетиків), працездатністю і високою точністю вимірювання на малих швидкостях переміщення металу щодо чуттєвої індукційної котушки, розширеними функціональними можливостями і меншими масо-габаритними показниками володіє «Безконтактний перемикач» (2), у якому використовується підвищена частота робочого процесу. Пристрій реалізує принцип зриву генерації високочастотного LC-генератора, зібраного на логічному КМОП-елементі, при наближенні металу до розімкнутого феритового магнітопроводу його котушки. На такому принципі виконують датчики частоти обертання і положення, але вони також мають наступні недоліки: - низькою чутливістю, тому що котушку доводиться постачати магнітопроводом; - завищені через застосування магнітопровода масо-габаритні показники; - низька термостабільність, оскільки генерація при низьких температурах зривається при великих зазорах, а при високих температурах - при менших, що означає велику залежність індицируємого кута положення від температури навколишнього 5 77233 6 середовища; ксаційних коливань, що безперервно порівнюється - низькою точністю виміру кута положення, в змішувачі з близької за величиною частотою оскільки значення, що індицирується цілком залеаналогічного зразкового LC-генератора, а отримажить від величини робочого зазору; на різницева частота низькочастотних биттів після - недостатня перешкодозахищеність властива пригнічення високочастотних гармонійних складокотушкам із сердечниками. вих фільтром низької частоти перетворюється за Ще більш високою чутливістю, меншими масодопомогою компаратора в імпульси прямокутної габаритними показниками, підвищеною термостаформи, шляхом використання обох LC-генераторів більністю і перешкодозахищеністю характеризуяк вимірювальних і зміни індуктивності індукційних ється пристрій «Металлоискатель повишенной котушок і, відповідно, частоти генераторів, фіксації чуствительності» (3), що представляє собою датвідхилення різницевої частоти биттів на виході чик, який реагує на величину відстані між металезмішувача від заданого середнього значення і фовим об'єктом її індукційною котушкою, обраний як рмування за допомогою частотного компаратора прототип рішенню, що замовляється, і таке, що вихідних імпульсів прямокутної форми і забезпенайбільш близьке до нього за сукупністю ознак. чення підвищення точності вимірів, підвищення Принцип дії пристрою заснований на вимірі різниці точності, термостабільності, перешкодостійкості, дуже близьких високих частот зразкового і вимізниження масо-габаритних показників і розширенрювального LC-генераторів, виконаних за однаконя функціональних можливостей відомого привою схемою і на однакових логічних КМОПстрою. елементах. Оскільки відносна зміна різницевої Поставлена задача вирішується за рахунок точастоти багаторазово перевищує відносну зміну го, що пристрій-датчик, що реагує на величину частоти вимірювального генератора, чутливість відстані між металевим об'єктом і індукційною копристрою значно зростає, а робочий зазор між тушкою, і такий, що містить два високочастотних, котушкою індуктивності вимірювального генератонастроєних на близькі частоти LC-генератора, кора і металевим об'єктом може досягати десятків жний з який виконано на логічному КМОПміліметрів. Однотипність елементів і схем генераелементі, що інвертує, вхід якого з'єднано з негаторів припускає однаковий температурний дрейф тивним виводом джерела живлення через перший частот генераторів і, отже, підвищення термостаконденсатор і з його виходом, що є виходом генебільності. Зменшення масо-габаритних показників і ратора, через послідовні індукційну котушку і пердеяке підвищення перешкодозахищеності визнаший резистор, точку з'єднання яких також підключається використанням відносно невеликого карчено до негативного виводу джерела живлення касу контуру проміжної частоти (ПЧ) переносного через другий конденсатор, а виходи обох генерарадіоприймача. Устрій-прототип має наступні неторів підключені до однойменних входів змішувача доліки: частот, вихід якого через Т-образний фільтр низь- низька термостабільність, припустима у викої частоти, виконаний на другому і третьому репадку його прямого призначення, але неприйнятна зисторах і третьому конденсаторі, з'єднаний із для датчика частоти обертання і кута положення, входом компаратора, що містить послідовні другий обумовлена, з однієї сторони надлишковою чутлиі третій логічні інвертори, і, через четвертий резисвістю через занадто близькі частоти генераторів тор, - з його виходом, що є виходом першого фор(різниця складає соті і тисячні частки відсотка від мувача відповідно до винаходу датчик містить Dзразкової), а з іншого боку - різним температурним тригер як змішувач частот, а між його виходом і дрейфом частот генераторів, що хоч і виконані на входом Т-образного фільтра додатково включені однакових логічних елементах і за однаковою схепослідовно четвертий конденсатор, третій логічний мою, але конструкція і габарити їхніх котушок індуінвертор, вхід якого також з'єднаний з позитивним ктивності зовсім різні; виводом джерела живлення через додатковий - завищені масо-габаритні показники через зап'ятий резистор, а вихід, через додатковий шостий стосування для котушки індуктивності зразкового резистор, - із точкою з'єднання резисторів і конгенератора каркаса з феритовим сердечником денсатора Т-образного фільтра і діод, вихід змі- низька точність виміру кутів, оскільки величишувача також підключений через додатковий шосна, що індицирується цілком залежить від величитий конденсатор до другого входу додаткового ни робочого зазору між котушкою індуктивності п'ятого логічного елемента 2И-HI, що є одночасно вимірювального генератора і поверхнею внесеновходом скидання RS-тригера, утвореного з цього го в її поле металу; п'ятого елемента і другого інвертора, також вико- низька перешкодозахищеність через викоринаного на логічному елементі 2И-НІ, перший вхід стання котушки індуктивності із сердечником. якого є одночасно входом компаратора і входом - обмежені функціональні можливості, тому що установки RS-тригера, а вихід - виходом RSпристрій не дозволяє контролювати свою працезтригера, безпосередньо, а до позитивного виводу датність і здійснювати такі точні операції як, наджерела живлення - через сьомий додатковий приклад, фазировку датчика по положенню поршрезистор, утворює перший формувач вихідних ня першого циліндра у верхній мертвій точці. імпульсів датчика, а саме, кутових імпульсів, і місВ основу винаходу поставлено задачу удоскотить додатковий, виконаний так само, другий фоналення відомого устрою-датчика, що реагує на рмувач вихідних імпульсів датчика, а саме, імпувеличину відстані між металевим об'єктом і індукльсів нульового відрахунку. Виходи першого і ційною котушкою, що виконує роль перемінної другого формувача з'єднані, відповідно, через воіндуктивності в схемі вимірювального високочассьмий і дев'ятий резистори з анодом світлодіода, тотного LC-генератора, зміною частоти його релакатод якого підключений до негативного вивода 7 77233 8 джерела живлення, а також пристрій доповнений формувача; маркерним диском, вісь якого сполучається з віссю Ж - зміна частоти другого генератора другого контрольованого об'єкта обертання. Пари кільцеформувача; вих концентричних інформаційних доріжок диска З - зміна частоти на виході змішувача частот виконані у вигляді металевих і діелектричних секдругого формувача; торів, що чергуються у кожнім кільці і у кожнім секИ - вихідний сигнал другого формувача - імпуторі пари, і мають наступне призначення в порядку льси нульового підрахунку. убування радіусів кілець: перша і друга доріжки Як приклад реалізації розглянемо датчик часкутові імпульси і частота обертання, третя і четветоти обертання і кута положення колінчастого варта - імпульси нульового відліку. Кількість діелектла шестициліндрового V-образного двигуна розричних секторів першої чи другої доріжок дорівнює валу між рядами циліндрів 90 градусів і з числу циліндрів двигуна. Початок по ходу оберчерговістю роботи циліндрів: 1-4-2-5-3-6. тання диска кожного діелектричного сектора перПристрій містить формувач 1 кутових Імпульшої доріжки відповідає положенню верхньої мертсів і виконаний так само формувач 2 імпульсів нувої точки поршня в даному циліндрі, а кутова льового відрахунку. У формувачі 1 містяться два тривалість діелектричних секторів першої доріжки однакових і настроєних на близькі частоти високовизначає скважність кутових імпульсів. На третій частотних LC- генератора 3 і 4. Генератор 3 викодоріжці є тільки один діелектричний сектор, сполунано на першому логічному інверторі 5, вхід якого чений із сектором першого циліндра, що чергуєтьз'єднано з мінусом джерела живлення через перся з металевим у цьому ж секторі четвертої доріжший конденсатор 6 і, через послідовні індукційну ки. Мініатюрні індукційні котушки всіх чотирьох LCкотушку 7 і перший резистор 8, - з його виходом, генераторів виконані однаково-плоскими і без серщо є виходом генератора. Точка з'єднання котушдечників, але в кожному формувачу імпульсів одна ки 7 і резистора 8 підключено через другий конкотушка містить на кілька витків більше ніж у іншій. денсатор 9 до мінуса джерела живлення. Виходи Усі котушки вмонтовані в отвори друкованої плати генераторів 3 і 4 підключено до входів С і D Dурівень з її поверхнею, протилежною тієї, на якій тригера 10, що виконує роль змішувача частот. спаяна схема формувача імпульсів. Плата формуВихід змішувача 10 підключений через послідовні вача звернена індукційними котушками до доріжок четвертий конденсатор 11, четвертий інвертор 12, маркерного диска і зафіксована паралельно його вхід якого підключений також до плюса джерела поверхні з зазором, індукційні котушки на платі живлення через п'ятий резистор 13, діод 14, друформувача зорієнтовані в один ряд уздовж радіуса гий резистор 15 і третій резистор 16, точка з'єдмаркерного диска таким чином, що їхні вісі намонання яких підключена через шостий резистор 17 тування відстоять від центра обертання маркернодо виходу інвертора 12 і, через третій конденсатор го диска на величину середнього радіуса кожної 18, - до мінуса джерела живлення, перший вхід інформаційної доріжки, відповідно, а котушки з другого інвертора 19 типу 2И-НІ, його вихід, третій великою кількістю витків установлені напроти інвертор 20, вихід якого підключений також до першої і третьої доріжок. першого входу інвертора 19 через четвертий реНа Фіг.1 наведено принципова схема пропонозистор 21, до вихідного виводу кутових імпульсів ваного датчика. формувача 1. Вихід змішувача 10 підключений На Фіг.2 наведені епюри, що пояснюють принтакож через п'ятий конденсатор 22 до точки з'єдцип дії формувача сигналів датчика, де: нання сьомого резистора 23, другий вивід якого А - імпульси на виході змішувача частот; підключений до плюса джерела живлення, із друБ - імпульси на виході одновібратора; гим входом п'ятого інвертора 24 типу 2И-НІ, перВ - сигнали скидання RS-тригера; ший вхід якого підключений до точки з'єднання Г - сигнали установки RS-тригера; виходу інвертора 19 із входом інвертора 20, а його Д - вихідний сигнал датчика. вихід - до другого входу інвертора 19. Виходи На Фіг.3 показаний варіант формування інфопершого формувача 1 кутових імпульсів і другого рмаційних доріжок маркерного диска і позначена формувача 2 імпульсів нульового відрахунку з'єдвзаємна орієнтація індукційних котушок і секторів нані через послідовні восьмий резистор 25 і дев'ядиска. тий резистор 26, відповідно, а точка з'єднання реНа Фіг.4 приведені епюри, що показують зміну зисторів 25 і 26 підключена до мінуса джерела частот генераторів, змішувачів і формування вихіживлення через світлодіод 27. Пари кільцевих дних сигналів датчика при повороті маркерного концентричних інформаційних доріжок маркерного диска, де: диска виконані у вигляді металевих і діелектричA - кути положення у відповідності до повороту них секторів, що чергуються у кожнім кільці і кожмаркерного диска верхніх мертвих крапок цилінднім секторі пари, і мають наступне призначення в рів і тривалості вихідних сигналів датчика; порядку убування радіусів кілець: перша і друга Б - зміна частоти першого генератора першого доріжки - кутові імпульси і частота обертання, трефоромувача під час повороту маркерного диска; тя і четверта - імпульси нульового відрахунку. КіВ - зміна частоти другого генератора першого лькість діелектричних секторів першої або другої формувача; доріжок дорівнює числу циліндрів двигуна. ПочаΓ - зміна частоти на виході змішувача частот ток по ходу обертання диска кожного діелектричпершого формувача; ного сектора першої доріжки відповідає положенД - вихідний сигнал першого формувача - куню верхньої мертвої точки поршня в даному тові імпульси; циліндрі, а кутова тривалість діелектричних сектоΕ - зміна частоти першого генератора другого рів першої доріжки визначає скважність кутових 9 77233 10 імпульсів. На третій доріжці є тільки один діелектякості опорної обрана частота 10кгц. Оскільки в ричний сектор, сполучений із сектором першого пристрої генератор опорної частоти відсутній, фоциліндра. Мініатюрні індукційні котушки усіх чотирмування вихідних сигналів датчика здійснюється рьох LC-генераторів виконано однаково - плоскишляхом контролю відхилення періодів повторення ми і без сердечників, але у кожнім формувачі імсигналів на виході змішувачів. Для цього у формупульсів одна котушка містить на кілька витків вачі 1 на конденсаторі 11, резисторі 13 і інверторі більше ніж інша. Усі котушки вмонтовані в отвори 12 зібрано одновібратор, що формує по задньому друкованої плати врівень з її поверхнею, протилефронту вихідного сигналу змішувача 10 (Фіг.2,А) жної тієї, на якій спаяна схема формувача імпульукорочений сигнал постійної тривалості (Фіг.2,Б), сів. Плата звернена індукційними котушками до що періодично заряджає з виходу інвертора 12 доріжок маркерного диска і зафіксовані паралельконденсатор 18 через діод 14 і резистор 16. Розно поверхні маркерного диска з зазором. Індукційні ряджається конденсатор 18 через резистор 17 і котушки виставлені в ряд уздовж радіуса маркервихід інвертора 12. Оскільки опір резистора 17 ного диска таким чином, що їхні вісі намотування більше опору резистора 15, час зарядки постійний, відстоять від центра обертання диска на величину а час розрядки дорівнює періоду повторення сигсереднього радіуса кожної інформаційної доріжки, налів одновібратора мінус їхню тривалість, напруа котушки з великою кількістю витків установлені га на конденсаторі 18 змінюється, як показано на проти першої і третьої доріжок. У процесі роботи Фіг.2,Г. При збільшенні частоти сигналів на виході датчика маркерний диск (Фіг.3) обертається з часінвертора 12 спадаюча експонента напруги на тотою вдвічі меншою частоти обертання колінчасконденсаторі 18, починаючи з деякої величини того вала двигуна, і його металеві сектори інфорчастоти, перестає опускатися нижче порога перекмаційних доріжок, виконані наприклад, з міді або лючення (показаного на Фіг. 2,Г пунктирною лініалюмінію, періодично взаємодіють із установлеєю) по входу установки RS-тригера, зібраного на ними проти цих доріжок індукційними котушками. логічних елементах 19 і 24 типу 2-И-НІ, на вхід Кутова діаграма розподілення запалювання у фунскидання якого постійно подаються короткі імпулькції кута повороту маркерного диска датчика для си (Фіг.2,B), сформовані шляхом диференціювання даного типу двигуна, що визначається кутовими за допомогою конденсатора 22 і резистора 23 задхарактеристиками першої і другої доріжок маркерніх спадаючих фронтів сигналів на виході змішуваного диска, приведена на Фіг.4,А, де номера циліча 10 (Фіг.2,Г). На вході установки тригера присутндрів позначені римськими цифрами. Частоти реній сигнал «1», і, у момент надходження на вхід лаксаційних LC-генераторів 3 і 4 (Фіг.1) формувача скидання чергового короткого сигналу «0», він імпульсів 1 і генераторів формувача 2 обрані, як і в скидається, на виході інвертора 19 з'являється устрої-прототипі, досить високими - 100 і 110кгц, сигнал «0», що інвертується інвертором 20, і на відповідно. Однак, як видно, зрушення частот у виході формувача 1 кутових імпульсів з'являється порівнянні з прототипом непорівняно вище - блисигнал «1» (Фіг.2,Д). При зменшенні частоти сигзько 10%. При обертанні маркерного диска, коли налів на виході інвертора 12 час розряду конденметалевий сектор його першої інформаційної досатора 18 збільшується, і настає момент, коли ріжки відходить від індукційної котушки 7 (Фіг.1), після закінчення короткого імпульсу скидання на частота релаксаційного LC-генератора 3, як покавході установки тригера продовжує зберігатися зано на Фіг.4,Б, зменшується, приблизно від напруга меншого рівня, ніж поріг переключення 105кгц до 100кгц, тобто змінюється на 5%. У той інвертора 19, у перебігу часу, необхідного для же час частота генератора 4, до індукційної котушустановки тригера. Тригер установлюється, а на ки якого наближається металевий сектор другої виході формувача 1 з'являється сигнал «0». Посдоріжки маркерного диска, як показано на Фіг.4,B, лідовне з'єднання інверторів 19,20 і їхнє охоплензбільшується від 110кгц до 115кгц, тобто теж зміня позитивним зворотним зв'язком з виходу інвернюється, приблизно, на 5%. Отримана на виході тора 20 на перший вхід інвертора 19 через змішувача 10 різницева частота (Фіг.4,Г) при цьорезистор 21 являє собою тригер Шмитта. Об'єднаму збільшиться від 5 до 15кгц. Отже, навіть при ні по одному входу тригер Шмитта і RS-тригер (інтакім великому зрушенні частот, п'ятивідсотковій вертори 19, 20, 24) істотно підвищують перешко(але протилежному по напрямку) зміні частот гедоустойчивість пристрою, що дуже важливо при нераторів 3 і 4 відповідає троєкратна зміна частовикористанні високочастотних систем запалюванти на виході змішувача 10. При подальшому повоня високої енергії. роті маркерного диска на кут близько 20гр. Процес формування інших кутових імпульсів (Фіг.4,А) частота генератора 3, до індукційної ковідбувається аналогічно. Точне значення частоти тушки 7 якого наближається металевий сектор переключення тригера (10кгц) установлюється першої доріжки диска, збільшується від 100 до шляхом підбора величини опору резистора 17. 105кгц (Фіг.4,Б). Одночасно з цим частота генераОскільки за один оборот колінчастого вала двигутора 4, від котушки якого відходить металевий на формується три кутових імпульси, що при сусектор другої доріжки, зменшується від 115 до часних методах обробки інформації цілком доста110кгц (Фіг.4,B). Як видно на Фіг.4,Г, частота на тньо при самій інтенсивній динаміці, ці імпульси виході змішувача 10 при цьому зменшується від 15 також використовуються як сигнали частоти обердо 5кгц. Далі зміна частот генераторів і на виході тання. При необхідності одержання більшої кількозмішувача під час обертання маркерного диска сті імпульсів на оборот на маркерному диску може повторюється, як описано вище. Для забезпечення бути сформована ще одна інформаційна доріжка з однакового запасу надійності при деякім відхиленмаксимальним діаметром. Т.к.скважніст імпульсів ні максимальної і мінімальний різницевих частот у частоти обертання значення не має, кути метале 11 77233 12 вих і діелектричних секторів доріжки виконано одформувачів (працездатність пристрою зберігаєтьнаковими, а обидві індукційні котушки додаткового ся при збільшенні зазору між платою з індукційнитретього окремого формувача імпульсів частоти ми котушками до 4-5мм) і в той же час додати їм обертання розташовані не уздовж радіуса диска, а якість незалежності точності від величини робочоуздовж середньої окружності доріжки так, щоб осі го зазору. На Фіг.4, Б, B, Г показано у вигляді пеїхнього намотування відстояли по куті один від реривчастої лінії зміну частот при зменшенні зазоодного на непарне число кутів сектора. ру між платою і диском, і пунктирною лінією - при Форувач 2 імпульсів нульового відрахунку його збільшенні. Наприклад, якщо зазор збільшепрацює так само, як і формувач 1. Єдиною відмінний, зміна частот генераторів від наближення меністю є те, що за один оборот маркерного диска талевого сектора скоротиться і складе, наприклад, формується один імпульс нульового відліку. Оскі102 і 112кгц. Однак крайні значення різницевої льки на маркерному диску діелектричні сектори частоти зміняться в протилежних напрямках: знанульового відліку і першого циліндра збігаються чення 5кгц збільшиться до 8кгц, а значення 15кгц (Фіг.3), сигнал нульового відліку позначає верхню зменшиться до 12. При цьому запас надійності мертву точку саме першого циліндра (Фіг.4,И). спрацьовування тригера у формувачі знижується з Причому, тому що радіуси третьої і четвертої до5кгц до 2кгц, але фази досягнення частоти перекріжок маркерного диска менше радіусів першої іі лючення тригера (10кгц) не змінюються, отже, кудругої доріжок, а діаметри індукційних котушок тові помилки не з'являються. Звичайно, точність відрізняються незначно, вплив металевих секторів зберігається у визначених межах зміни зазору, диска при однаковому куті його повороту на котунаприклад, не можна допускати значного зменшки формувача 2 починається раніше, ніж на кошення мінімального значення різницевої частоти, тушки формувача 1. Тому передній фронт сигналу коли знижується запас надійності і різко збільшунульового відліку завжди випереджає передній ється кутова помилка на високих оборотах, але фронт кутового імпульсу першого циліндра, а його технологічні відхилення розмірів у процесі масовозадній фронт завжди відстає від заднього фронту го виробництва компенсуються цілком і з запасом. кутового імпульсу першого циліндра. Це «перекТехнічний результат у вигляді підвищення ривання» одного імпульсу іншим відбувається при термостабільності відомого пристрою досягається будь-яких частотах обертання, і дуже корисно при за рахунок однакового принципового і конструктиподальшій цифровій обробці інформації. Величина вного виконання релаксаційних LC-генераторів, у «перекриття» тим більше, чим більше діаметр дитому числі шляхом використання всіх чотирьох ска в порівнянні з діаметрами індукційних котушок, інверторів з одного корпуса, що припускає однакоі її можна збільшити шляхом збільшення кута секвий тепловий відхід їхніх частот, а також за рахутора третьої і четвертої доріжок диска. Для підвинок диференціонального принципу зміни частот і щення лінійності зміни різницевих частот у функції багаторазового збільшення зрушення частот. По кута повороту маркерного диска і зменшення кутотермостабільності пропонований датчик не устувої помилки впливу секторів на пари котушок одпає індуктивним і датчикам на основі ефекту Холу. ного формувача через їхні різні діаметри, котушка Технічний результат у вигляді підвищення пез великим числом витків розташована проти інфорешкодостійкості відомого пристрою досягається рмаційної доріжки з великим діаметром. шляхом мініатюризації всіх індукційних котушок, Датчик додатково постачений світлодіодним відмовлення від використання сердечників, істотіндикатором 27, що дозволяє не тільки контролюним підвищенням, у порівнянні з частотами основвати його працездатність, у тому числі і на зупинених перешкод, різницевих частот, а також спільному двигуні, але і відрізняти верхню мертву точку ним використанням при формуванні вихідних першого циліндра від інших і виконувати точну імпульсів тригера Шмитта і RS-тригера. За перешфазировку датчика по положенню поршня першокодостійкістю пропонований датчик не уступає го циліндра у верхній мертвій точки. оптичним і датчикам на основі ефекту Холу. У зв'язку з тим, що опір резистора 26 обрано Технічний результат у вигляді зниження масобільшим опору резистора 25, індикатор забезпечує габаритних показників відомого пристрою досягатри режими світлової індикації: ється за рахунок мініатюризації плоских індукцій- сигнал «0» на виході формувача 1, «1» - на них котушок, відсутності сердечників і каркасів і виході формувача 2, встроювання котушок в отвори в друкованій платі з слабке світіння - наближається верхня мертва електронними чип-елементами для поверхневого точка поршня першого циліндра; монтажу схем формувачів. Товщина пропоновано- сигнал «1» на виходах обох формувача, го датчика може бути менше товщини оптичного. яскраве світіння - верхня мертва крапка поршТехнічний результат у вигляді розширення ня першого циліндра; функціональних можливостей відомого пристрою - сигнал «1» на виході формувача 1, «0» - на досягається за рахунок постачання пропонованого виході формувача 2, датчика світлодіодним індикатором, що дозволяє середнє світіння - будь-який циліндр, крім контролювати його працездатність, відрізняти пепершого. рший циліндр від інших і фазирувати датчик за Технічний результат у вигляді підвищення тоположенням верхньої мертвої точки поршня перчності виміру кута відомого пристрою досягається шого циліндрам на зупиненому двигуні. за допомогою мініатюризації індукційних котушок і Зазначеними вище можливостями не володіє реалізації диференціального принципу зміни часжоден з відомих датчиків цього типу, а такий, що тот релаксаційних генераторів, що дозволяє істотзамовляється, не відомий авторам з вітчизняної і но підвищити чутливість вимірювальних органів зарубіжної патентної та технічної літератури, ви 13 77233 14 рішує актуальну проблему. Його промислове зачином, воно відповідає усім критеріям виноходу. стосування є очевидним, перевірене серією стенТому просимо надати рішенню, що заявляється, дових іспитів, в процесі яких одержано підтверюридичний захист - патент України. дження вказаного технічного результату. Таким Комп’ютерна верстка О. Гапоненко Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRotation frequency and angular position transducer
Автори англійськоюAbramchuk Fedir Ivanovych, Babenko Pavlo Hryhorovych, Bohomolov Viktor Oleksandrovych, Linnyk Yevhen Vasyliovych, Manoilo Volodymyr Maksymovych, Turenko Anatolii Mykolaiovych
Назва патенту російськоюДатчик частоты вращения и углового положения
Автори російськоюАбрамчук Федор Иванович, Бабенко Павел Григорьевич, Богомолов Виктор Александрович, Линнык Евгений Васильевич, Линник Евгений Васильевич, Манойло Владимир Максимович, Туренко Анатолий Николаевич
МПК / Мітки
МПК: G01P 3/42
Мітки: датчик, кута, обертання, частоти, положення
Код посилання
<a href="https://ua.patents.su/7-77233-datchik-chastoti-obertannya-ta-kuta-polozhennya.html" target="_blank" rel="follow" title="База патентів України">Датчик частоти обертання та кута положення</a>
Датчик частоти обертання
Номер патенту: 28703
Опубліковано: 16.10.2000
Автор: Літвінов Генадій Васильович
МПК: G01P 3/42
Мітки: частоти, датчик, обертання
Формула / Реферат:
Датчик частоти обертання, який містить в собі корпус з розміщеним і закріпленим на ньому постійним магнітом з полюсними наконечниками, магнітний потік якого замикається на П-образне феромагнітне осердя з, намотаною на ньому, сигнальною обмоткою, який відрізняється тим, що між полюсними наконечниками і П-образним осердям на валу датчика закріплений комутатор магнітного потоку із діамагнітного матеріалу, виконаний у вигляді стакану, в стінні...
Датчик частоти обертання
Номер патенту: 54048
Опубліковано: 15.08.2005
Автор: Канаєв Олександр Олексійович
МПК: G01P 3/02
Мітки: частоти, датчик, обертання
Формула / Реферат:
Спосіб, що пропонується, відноситься до галузі медицини, а точніше до терапії і таких її розділів, як нефрологія, кардіологія, ендокринологія, загальна практика - сімейна медицина.Клубочкова фільтрація - ультрафільтрація води і низькомолекулярних компонентів плазми через клубочковий фільтр, а швидкість клубочкової фільтрації (ШКФ) - об'єм клубочкової фільтрації за одиницю часу.Клубочкова фільтрація - показник, що характеризує...
Датчик кутового положення вала обертання механізмів
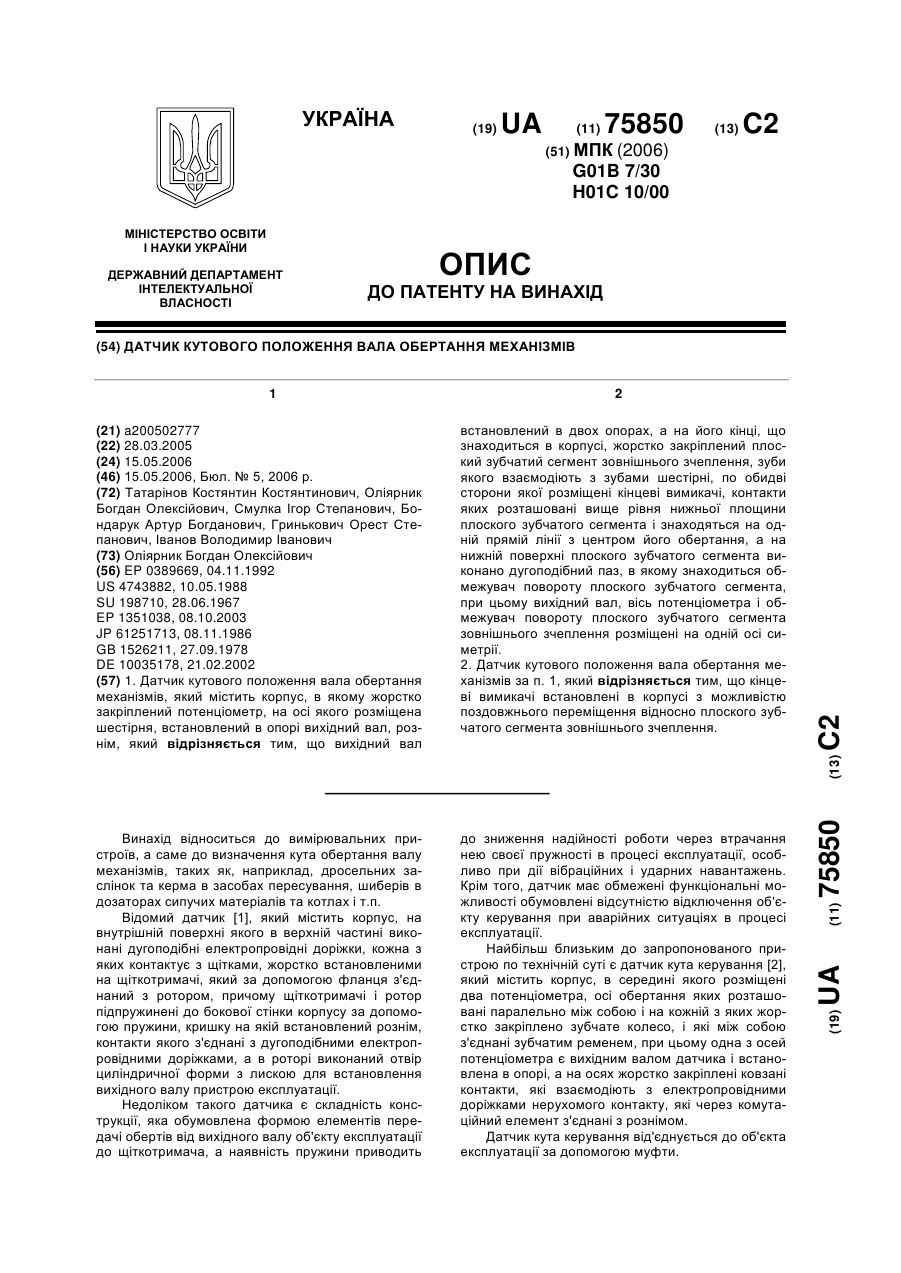
Номер патенту: 75850
Опубліковано: 15.05.2006
Автори: Смулка Ігор Степанович, Гринькович Орест Степанович, Бондарук Артур Богданович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Іванов Володимир Іванович, Татарінов Костянтин Костянтинович
МПК: G01B 7/30, H01C 10/00
Мітки: кутового, датчик, положення, механізмів, обертання, вала
Формула / Реферат:
1. Датчик кутового положення вала обертання механізмів, який містить корпус, в якому жорстко закріплений потенціометр, на осі якого розміщена шестірня, встановлений в опорі вихідний вал, рознім, який відрізняється тим, що вихідний вал встановлений в двох опорах, а на його кінці, що знаходиться в корпусі, жорстко закріплений плоский зубчатий сегмент зовнішнього зчеплення, зуби якого взаємодіють з зубами шестірні, по обидві сторони якої...
Датчик положення ротора вентильного двигуна
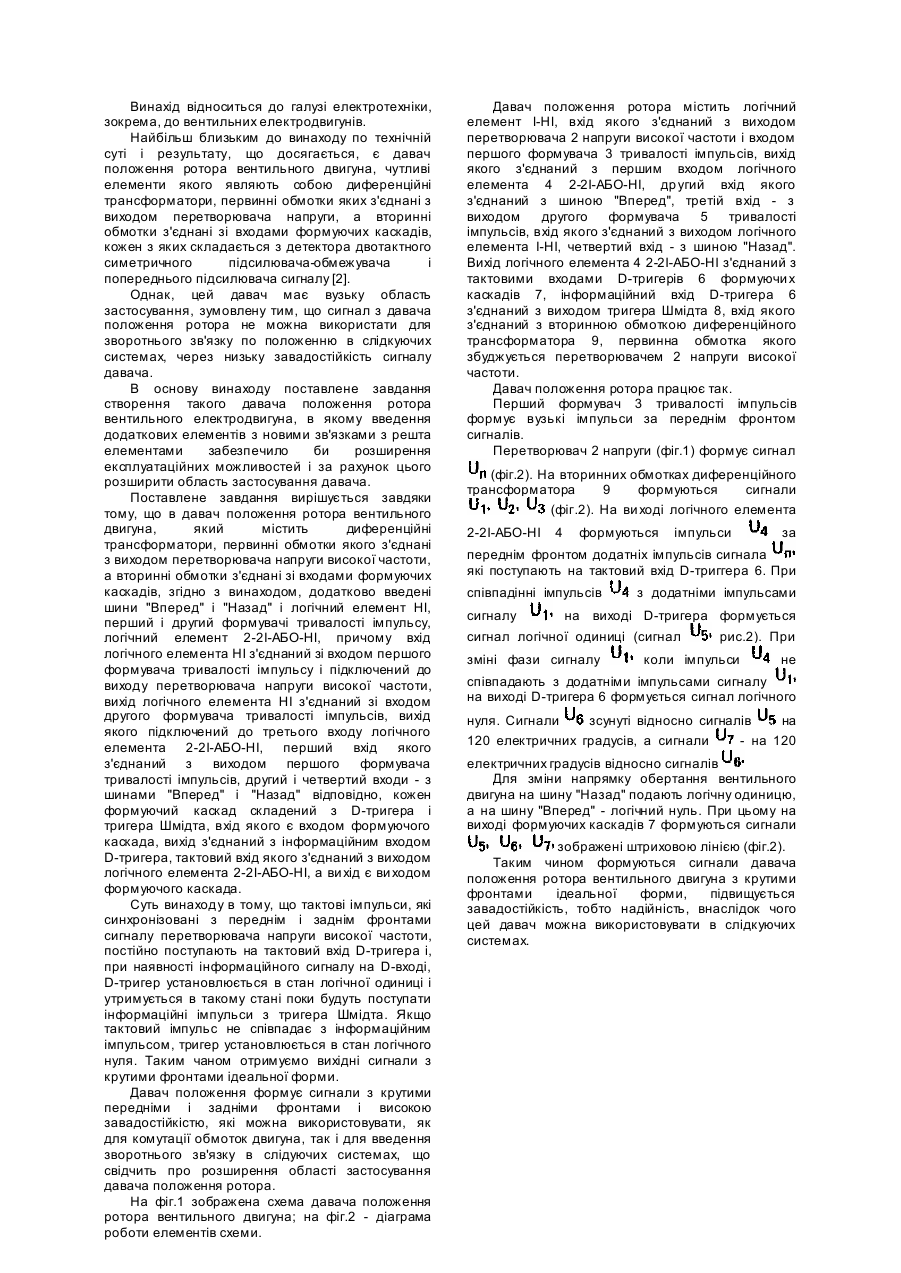
Номер патенту: 18440
Опубліковано: 25.12.1997
Автори: Осідач Юрій Володимирович, Літинський Зенон Михайлович, Чайковський Роман Іванович, Ткачук Василь Іванович
МПК: H02K 29/06
Мітки: ротора, датчик, двигуна, вентільного, положення
Формула / Реферат:
Датчик положения ротора вентильного двигателя, содержащий дифференциальные трансформаторы, первичные обмотки которых соединены с выходом преобразователя напряжения высокой частоты, а вторичные обмотки соединены с входами формирующих каскадов, отличающийся тем, что он снабжен шинами "Вперед" и "Назад", и в него введены логический элемент НЕ, первый и второй формирователи длительности импульса, логический элемент...
Магнітна система датчика частоти обертання
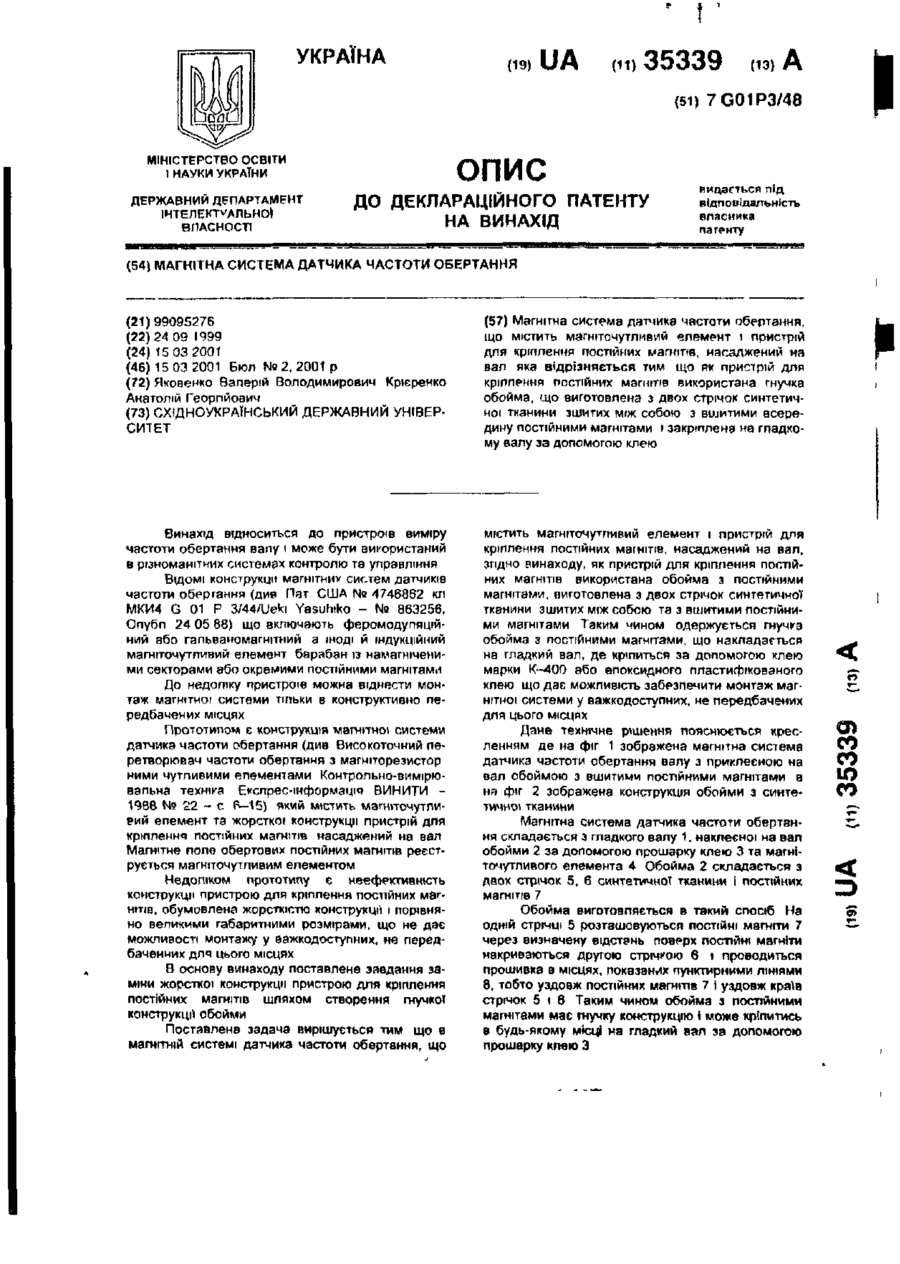
Номер патенту: 35339
Опубліковано: 15.03.2001
Автори: Крієренко Анатолій Георгійович, Яковенко Валерій Володимирович
МПК: G01P 3/42
Мітки: частоти, система, магнітна, обертання, датчика
Формула / Реферат:
Магнітна система датчика частоти обертання, що містить магніточутливий елемент і пристрій для кріплення постійних магнітів, насаджений на вал, яка відрізняється тим, що як пристрій для кріплення постійних магнітів використана гнучка обойма, що виготовлена з двох стрічок синтетичної тканини, зшитих між собою, з вшитими всередину постійними магнітами, і закріплена на гладкому валу за допомогою клею.