Спосіб цільового регулювання в механізмах енергетичних установок проценка
Номер патенту: 80576
Опубліковано: 10.06.2013
Автори: Проценко Леонід Михайлович, Проценко Андрій Леонідович

Формула / Реферат
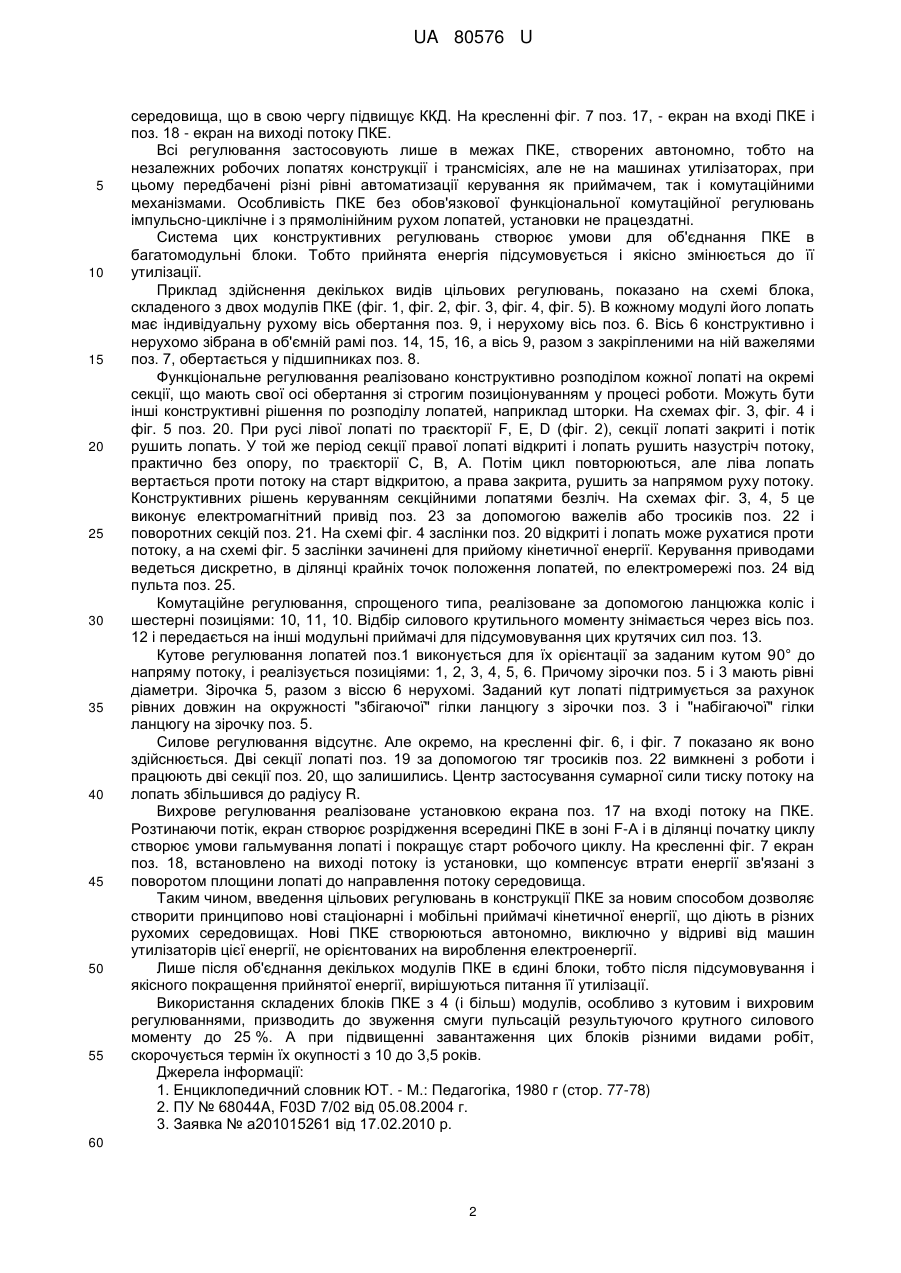
Спосіб цільового регулювання в механізмах енергетичних установок, що включає вибір приймача кінетичної енергії (ПКЕ), об'єднання їх у багатомодульні блоки для прийому, підсумовування і передачі енергії на утилізацію, який відрізняється тим, що вибирають приймачі, імпульсно-коливальної циклічної дії або з прямолінійним циклічним рухом лопатей, до конструкції яких вводять п'ять цільових регулювань: функціональне, комутаційне, кутове, силове, вихрове, причому введення здійснюють у вигляді обов'язкового функціонального шляхом розбивання лопаті на окремі секції, що мають власні керовані осі обертання, і обов'язкового комутаційного та інших згаданих регулювань, на вибір для одного приймача, а прийняту енергію від кожного модуля підсумовують і якісно змінюють до її утилізації.
Текст
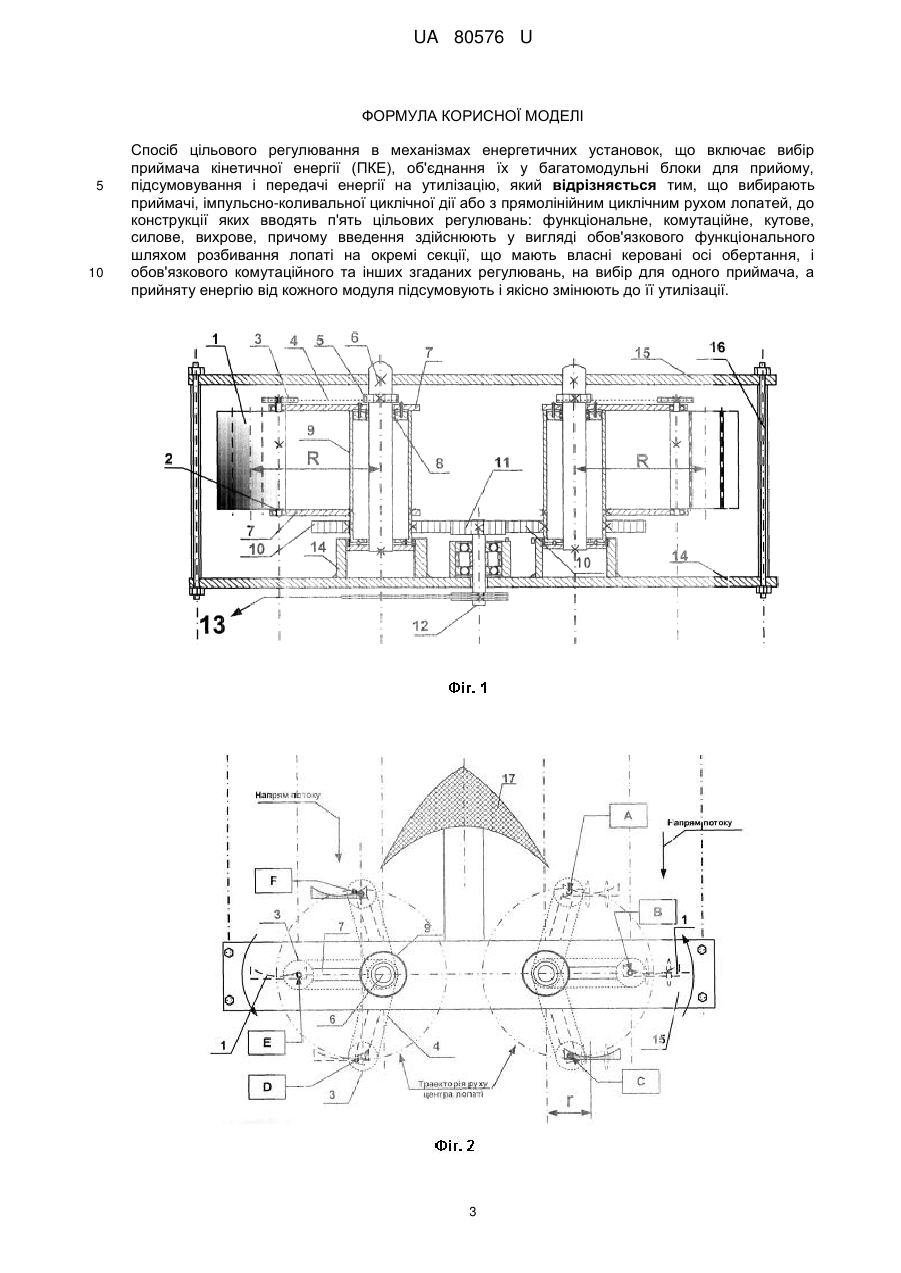
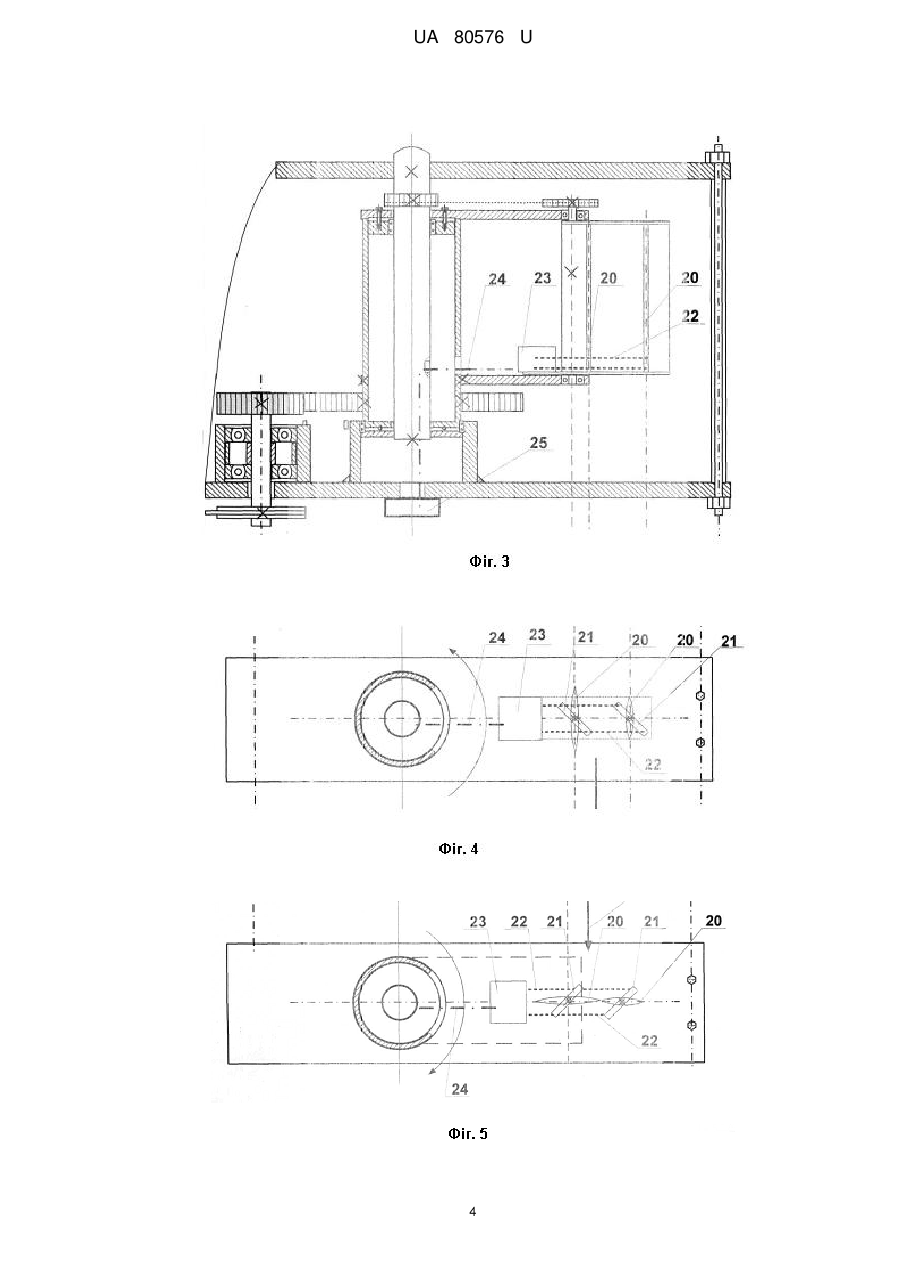
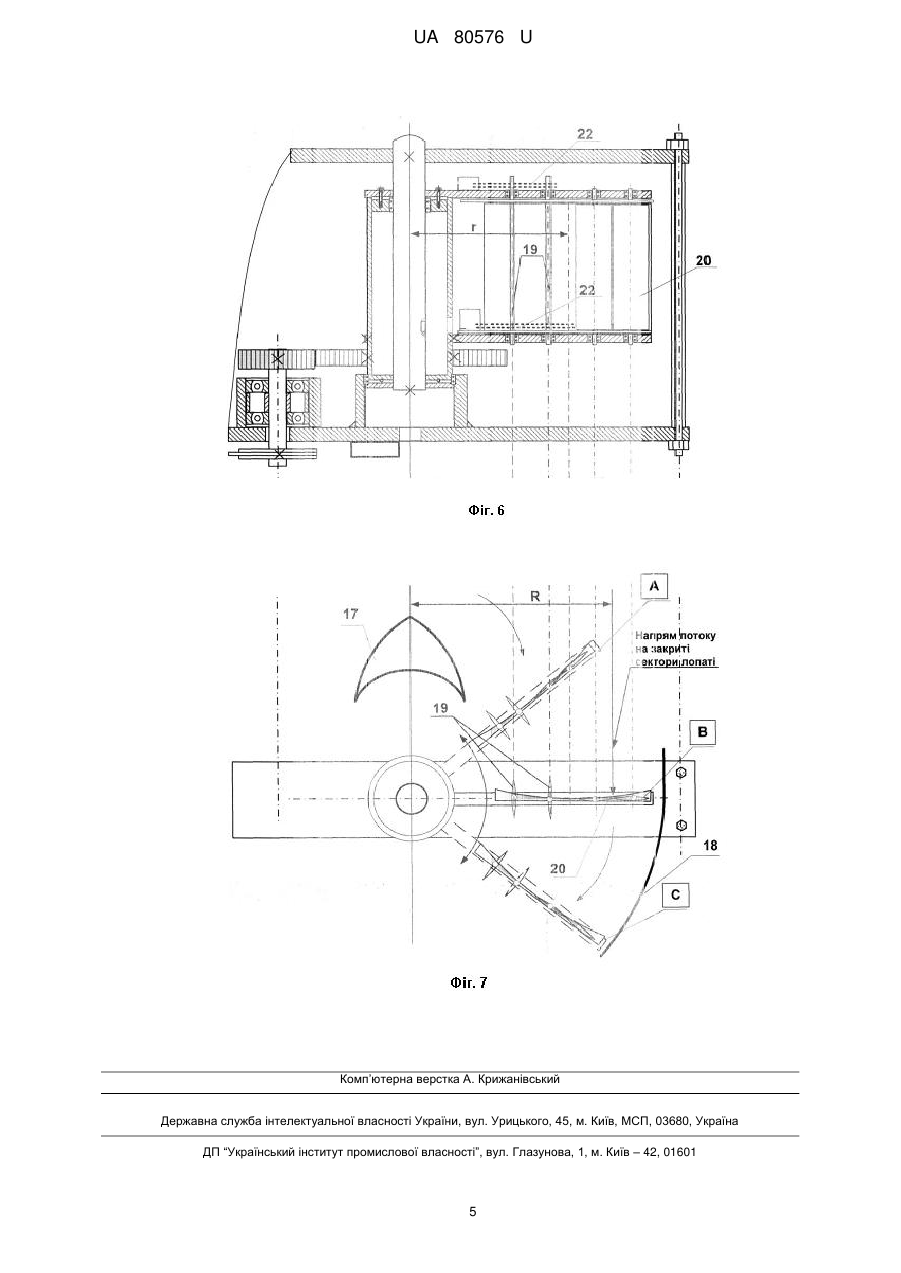
Реферат: Спосіб цільового регулювання в механізмах енергетичних установок включає вибір приймача кінетичної енергії (ПКЕ), об'єднання їх у багатомодульні блоки для прийому, підсумовування і передачі енергії на утилізацію. Вибирають приймачі, імпульсно-коливальної циклічної дії або з прямолінійним циклічним рухом лопатей, до конструкції яких вводять п'ять цільових регулювань: функціональне, комутаційне, кутове, силове, вихрове, причому введення здійснюють у вигляді обов'язкового функціонального шляхом розбивання лопаті на окремі секції, що мають власні керовані осі обертання, і обов'язкового комутаційного та інших згаданих регулювань, на вибір для одного приймача, а прийняту енергію від кожного модуля підсумовують і якісно змінюють до її утилізації. UA 80576 U (54) СПОСІБ ЦІЛЬОВОГО РЕГУЛЮВАННЯ В МЕХАНІЗМАХ ЕНЕРГЕТИЧНИХ УСТАНОВОК ПРОЦЕНКА UA 80576 U UA 80576 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до добування енергії установками, які діють в різних середовищах: воді, повітрі і, що не виробляють електроенергію за нормами стандарту, і може бути використана в серійному виробництві нового класу енергетичних установок для сільського споживача. Відомого системного способу регулювань, застосованого до енергетичних установок, які діють в діапазоні низьких швидкостей робочого середовища, немає. Тому за найближчий аналог беремо звичайний вітродвигун, з будь-якою орієнтацією робочого вала лопатей, і який має будь-які конструктивні регулювання. В цих установках лопаті роблять безперервні повні звороти навколо однієї, загальної для лопатей, робочої осі. Якщо енергоустановку розділити на 3 головні складові: приймач енергії, передавальні механізми з трансмісією, і машину - утилізатор енергії, то всі випадки регулювань здійснюються на цих окремих складових. Так, на приймачах зустрічається конструкція автоматичного розвороту гвинтової лопаті уздовж подовжньої осі для отримання стабільного обертання вала (1). На трансмісіях і передавальних механізмах стабілізується швидкість обертанні валів за допомогою автоматики керування електромуфтами ковзання або варіаторами (2). У машинах утилізаторах (генератори енергії) регулювання автоматично змінюють число генераторів, які діють одночасно, а в межах групи установок генератори об'єднують в мережу (1). Таким чином, відомі регулювання здійснюють по окремих конструктивних елементах вітродвигунів, які орієнтовані на вироблення енергії для промислового використання. В основу корисної моделі поставлена задача створення нового системного способу регулювання в механізмах приймачів кінетичної енергії потоку будь-якого рухомого середовища для підвищення їх КПД. Поставлена задача вирішується тим, що спосіб цільового регулювання в механізмах енергетичних установок, що включає вибір приймача кінетичної енергії (ПКЕ), об'єднують в багатомодульні блоки для прийому, підсумовування і передавання енергії на утилізацію, який відрізняється тим, що вибираються приймачі імпульсно-коливальної циклічної дії або з прямолінійним циклічним рухом лопатей, в конструкцію яких вводять п'ять цільових регулювань: функціональне, комутаційне, кутове, силове, вихрове, причому введення здійснюють у вигляді обов'язкового функціонального шляхом розбивання лопаті на окремі секції, що мають власні керовані осі обертання, і обов'язкового комутаційного, і інших згаданих регулювань, на вибір для одного приймача, а прийняту енергію від кожного модуля підсумовують і якісно змінюють до її утилізації. Спосіб здійснюють таким чином. У приймачі імпульсно-коливальної циклічної дії або з прямолінійним циклічним рухом лопатей, які виконують функцію прийому кінетичної енергії (ПКЕ) потоку будь-якого рухомого середовища, вводять наступні регулювання: обов'язкове функціональне - в динаміці роботи ПКЕ, дискретно, в ділянці крайніх точок зміни напряму руху лопаті, змінює площу окремо взятої лопаті приймача енергії (міделів переріз) від максимальної на старті циклу до мінімальної наприкінці циклу руху (Креслення: фіг. 3, 4, 5); обов'язкове комутаційне - в динаміці роботи ПКЕ, воно застосовується в передаточних механізмах і трансмісіях для наступного: підсумовування прийнятої енергії, синхронізації руху лопатей, які не мають спільну вісь обертання, і згладжування імпульсів обертального моменту сил, передавання крутного силового моменту на машини утилізатори (Креслення: фіг. 11, 15 заявки № а201015261 від 17.02.2010); силове - в динаміці роботи ПКЕ, змінює центри точки дотику сил тиску середовища на лопаті, з метою змінити форму або розмір силового моменту, що передається з лопатей на трансмісію. Регулювання реалізується за допомогою керованої функціональної зміни площі лопатей, тобто задіяне функціональне регулювання. Застосовується при зміні швидкості середовища (Креслення: фіг. 6, 7). При повністю включеній половині лопаті, - радіус силового моменту рівний r, а при включенні половини лопаті, - радіус дорівнює R; кутове - в динаміці роботи ПКЕ підтримує заданий прямий (90°) або інший оптимальний кут положення площі лопаті до напряму потоку. Застосовується для лопатей ПКЕ з циклічним прямолінійним рухом по потоку. Приклад розкрито у заявці № а 201015261 від 17.02.2010; вихрове - в динаміці роботи ПКЕ, змінює напрям руху потоку середовища. Зміна напряму може відбуватися як на вході на ПКЕ, всередині установки, так і на її виході. Розсікаючи екрани на вході в циклічно коливальний ПКЕ, створюють за собою знижений тиск потоку, покращують гальмування і початок стартового циклу робочого руху лопатей. Бокові екрани застосовані в установках прямолінійного циклічного руху лопатей створюють ефект "чашки", що призводить до зменшення розтікання потоку, що в свою чергу підвищує ККД прийому енергії. І на виході завихряючий екран підсилює тиск на лопать на ділянці завершення робочого циклу, де впав силовий момент, із-за зменшення проекції площі лопаті на площину основного потоку 1 UA 80576 U 5 10 15 20 25 30 35 40 45 50 55 середовища, що в свою чергу підвищує ККД. На кресленні фіг. 7 поз. 17, - екран на вході ПКЕ і поз. 18 - екран на виході потоку ПКЕ. Всі регулювання застосовують лише в межах ПКЕ, створених автономно, тобто на незалежних робочих лопатях конструкції і трансмісіях, але не на машинах утилізаторах, при цьому передбачені різні рівні автоматизації керування як приймачем, так і комутаційними механізмами. Особливість ПКЕ без обов'язкової функціональної комутаційної регулювань імпульсно-циклічне і з прямолінійним рухом лопатей, установки не працездатні. Система цих конструктивних регулювань створює умови для об'єднання ПКЕ в багатомодульні блоки. Тобто прийнята енергія підсумовується і якісно змінюється до її утилізації. Приклад здійснення декількох видів цільових регулювань, показано на схемі блока, складеного з двох модулів ПКЕ (фіг. 1, фіг. 2, фіг. 3, фіг. 4, фіг. 5). В кожному модулі його лопать має індивідуальну рухому вісь обертання поз. 9, і нерухому вісь поз. 6. Вісь 6 конструктивно і нерухомо зібрана в об'ємній рамі поз. 14, 15, 16, а вісь 9, разом з закріпленими на ній важелями поз. 7, обертається у підшипниках поз. 8. Функціональне регулювання реалізовано конструктивно розподілом кожної лопаті на окремі секції, що мають свої осі обертання зі строгим позиціонуванням у процесі роботи. Можуть бути інші конструктивні рішення по розподілу лопатей, наприклад шторки. На схемах фіг. 3, фіг. 4 і фіг. 5 поз. 20. При русі лівої лопаті по траєкторії F, Е, D (фіг. 2), секції лопаті закриті і потік рушить лопать. У той же період секції правої лопаті відкриті і лопать рушить назустріч потоку, практично без опору, по траєкторії С, В, А. Потім цикл повторюються, але ліва лопать вертається проти потоку на старт відкритою, а права закрита, рушить за напрямом руху потоку. Конструктивних рішень керуванням секційними лопатями безліч. На схемах фіг. 3, 4, 5 це виконує електромагнітний привід поз. 23 за допомогою важелів або тросиків поз. 22 і поворотних секцій поз. 21. На схемі фіг. 4 заслінки поз. 20 відкриті і лопать може рухатися проти потоку, а на схемі фіг. 5 заслінки зачинені для прийому кінетичної енергії. Керування приводами ведеться дискретно, в ділянці крайніх точок положення лопатей, по електромережі поз. 24 від пульта поз. 25. Комутаційне регулювання, спрощеного типа, реалізоване за допомогою ланцюжка коліс і шестерні позиціями: 10, 11, 10. Відбір силового крутильного моменту знімається через вісь поз. 12 і передається на інші модульні приймачі для підсумовування цих крутячих сил поз. 13. Кутове регулювання лопатей поз.1 виконується для їх орієнтації за заданим кутом 90° до напряму потоку, і реалізується позиціями: 1, 2, 3, 4, 5, 6. Причому зірочки поз. 5 і 3 мають рівні діаметри. Зірочка 5, разом з віссю 6 нерухомі. Заданий кут лопаті підтримується за рахунок рівних довжин на окружності "збігаючої" гілки ланцюгу з зірочки поз. 3 і "набігаючої" гілки ланцюгу на зірочку поз. 5. Силове регулювання відсутнє. Але окремо, на кресленні фіг. 6, і фіг. 7 показано як воно здійснюється. Дві секції лопаті поз. 19 за допомогою тяг тросиків поз. 22 вимкнені з роботи і працюють дві секції поз. 20, що залишились. Центр застосування сумарної сили тиску потоку на лопать збільшився до радіусу R. Вихрове регулювання реалізоване установкою екрана поз. 17 на вході потоку на ПКЕ. Розтинаючи потік, екран створює розрідження всередині ПКЕ в зоні F-А і в ділянці початку циклу створює умови гальмування лопаті і покращує старт робочого циклу. На кресленні фіг. 7 екран поз. 18, встановлено на виході потоку із установки, що компенсує втрати енергії зв'язані з поворотом площини лопаті до направлення потоку середовища. Таким чином, введення цільових регулювань в конструкції ПКЕ за новим способом дозволяє створити принципово нові стаціонарні і мобільні приймачі кінетичної енергії, що діють в різних рухомих середовищах. Нові ПКЕ створюються автономно, виключно у відриві від машин утилізаторів цієї енергії, не орієнтованих на вироблення електроенергії. Лише після об'єднання декількох модулів ПКЕ в єдині блоки, тобто після підсумовування і якісного покращення прийнятої енергії, вирішуються питання її утилізації. Використання складених блоків ПКЕ з 4 (і більш) модулів, особливо з кутовим і вихровим регулюваннями, призводить до звуження смуги пульсацій результуючого крутного силового моменту до 25 %. А при підвищенні завантаження цих блоків різними видами робіт, скорочується термін їх окупності з 10 до 3,5 років. Джерела інформації: 1. Енциклопедичний словник ЮТ. - М.: Педагогіка, 1980 г (стор. 77-78) 2. ПУ № 68044A, F03D 7/02 від 05.08.2004 г. 3. Заявка № а201015261 від 17.02.2010 р. 60 2 UA 80576 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб цільового регулювання в механізмах енергетичних установок, що включає вибір приймача кінетичної енергії (ПКЕ), об'єднання їх у багатомодульні блоки для прийому, підсумовування і передачі енергії на утилізацію, який відрізняється тим, що вибирають приймачі, імпульсно-коливальної циклічної дії або з прямолінійним циклічним рухом лопатей, до конструкції яких вводять п'ять цільових регулювань: функціональне, комутаційне, кутове, силове, вихрове, причому введення здійснюють у вигляді обов'язкового функціонального шляхом розбивання лопаті на окремі секції, що мають власні керовані осі обертання, і обов'язкового комутаційного та інших згаданих регулювань, на вибір для одного приймача, а прийняту енергію від кожного модуля підсумовують і якісно змінюють до її утилізації. 3 UA 80576 U 4 UA 80576 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for target control in mechanisms of protsenko's power units
Автори англійськоюProtsenko Andrii Leonidovych, Protsenko Leonid Mykhailovych
Назва патенту російськоюСпособ целевой регулировки в механизмах энергетических установок проценко
Автори російськоюПроценко Андрей Леонидович, Проценко Леонид Михайлович
МПК / Мітки
МПК: F03D 7/00
Мітки: спосіб, регулювання, енергетичних, установок, механізмах, проценка, цільового
Код посилання
<a href="https://ua.patents.su/7-80576-sposib-cilovogo-regulyuvannya-v-mekhanizmakh-energetichnikh-ustanovok-procenka.html" target="_blank" rel="follow" title="База патентів України">Спосіб цільового регулювання в механізмах енергетичних установок проценка</a>
Спосіб переробки сірководню на паливо для суднових енергетичних установок
Номер патенту: 66509
Опубліковано: 10.01.2012
Автор: Лєонов Валерій Євгенович
МПК: F01K 21/00, B63H 21/00, C01B 17/16
Мітки: паливо, переробки, суднових, спосіб, сірководню, установок, енергетичних
Формула / Реферат:
Спосіб переробки сірководню на паливо для суднових енергетичних установок, який включає отримання пари для суднових турбін в котлі-утилізаторі, в який подають попередньо нагрітий у рекуперативному теплообміннику конденсат, який відрізняється тим, що теплоту для котла-утилізатора та рекуперативного теплообмінника отримують шляхом хімічної реакції сірководню з киснем повітря і доокислення отриманого сірчистого ангідриду киснем повітря,...
Спосіб утилізації теплоти відпрацьованих газів суднових енергетичних установок
Номер патенту: 32822
Опубліковано: 26.05.2008
Автори: Лєонов Валерій Євгенович, Шерстюк Володимир Григорович, Бень Андрій Павлович
МПК: B63H 21/00
Мітки: суднових, теплоти, утилізації, установок, відпрацьованих, газів, спосіб, енергетичних
Формула / Реферат:
1. Спосіб утилізації теплоти відпрацьованих газів суднових енергетичних установок, що включає об'єднання вихлопних трактів головного двигуна і допоміжних дизель-генераторів судна на вході в котел утилізації, який відрізняється тим, що до подачі в котел утилізації здійснюють очищення відпрацьованих газів від сажі методом поляризації та дифузії, отримання технологічної пари в котлі утилізації для внутрішньосуднових потреб за допомогою...
Спосіб комбінованого регулювання потужності конденсаторних установок
Номер патенту: 25085
Опубліковано: 25.07.2007
Автори: Шестеренко Володимир Євгеньович, Сірий Олег Миколайович, Богаєнко Дмитро Костянтинович
МПК: H02J 3/12
Мітки: комбінованого, установок, потужності, спосіб, регулювання, конденсаторних
Формула / Реферат:
Спосіб комбінованого регулювання потужності конденсаторних установок промислового підприємства, що передбачає комутацію секцій конденсаторної установки контакторами, який відрізняється тим, що регулювання потужності ведуть в два етапи, спочатку регулюють дискретно - шляхом підключення секцій контакторами, потім регулюють плавно - змінюючи потужність тільки однієї секції конденсаторної установки за допомогою напівпровідникового імпульсного...
Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 83379
Опубліковано: 10.07.2008
Автори: Назарова Наталя Станіславівна, Вовченко Олександр Іванович, Козирєв Сергій Сергійович
МПК: B23K 9/12, G05B 13/02
Мітки: автоматичного, електроімпульсних, спосіб, установок, регулювання
Формула / Реферат:
Спосіб автоматичного регулювання електроімпульсних установок, який полягає в тому, що автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням заданого допустимого відхилення, який відрізняється...
Спосіб автоматичного регулювання електроімпульсних установок
Номер патенту: 17153
Опубліковано: 15.09.2006
Автори: Назарова Наталя Станіславівна, Козирєв Сергій Сергійович
МПК: G05B 13/02
Мітки: спосіб, регулювання, установок, автоматичного, електроімпульсних
Формула / Реферат:
Спосіб автоматичного регулювання електроімпульсних установок, при якому автоматичне регулювання здійснюють за відхиленням вихідної величини, яку визначають як суму частки від ділення напруги, виміряної у момент замикання розрядного проміжку, на амплітудне значення розрядного струму та амплітудного значення розрядного струму, взятого з певним ваговим коефіцієнтом, з урахуванням заданого допустимого відхилення, який відрізняється тим, що...
Попередній патент: Спосіб діагностики недостатності сполучнотканинного компонента стінки піхви при пролапсі геніталій методом стокс-поляриметрії його орієнтаційної фібрилярної структури
Наступний патент: Запобіжна вибухова речовина
Випадковий патент: Спосіб одержання 1-[[3-(6,7-дигідро-1-метил-7-оксо-3-пропіл-1н-піразоло[4,3-d]піримідин-5-іл)-4-етоксифеніл]сульфоніл]-4-метилпіперазину та проміжні сполуки