Плавцевий рушій
Номер патенту: 81736
Опубліковано: 10.07.2013
Автори: Каян Володимир Павлович, Глушко Валентин Миколайович
Формула / Реферат
Плавцевий рушій, що містить прикріплений до корпусу плавзасобу привід поворотноколивального руху важеля, виконаний у вигляді повноповоротного електромагнітного двигуна з трифазним беззалізним статором з обмотками керування, які розміщені на немагнітному кільці в центральній площини симетрії двигуна, і ротором, що має два паралельні диски, на кожному з яких рівномірно по колу розміщено парне число постійних магнітів з перемінним чергуванням полюсів, а також блок керування приводом, і до вільного кінця важеля шарнірно прикріплена підпружинена лопать, який відрізняється тим, що пружне з'єднання важеля з лопаттю виконане у вигляді двох пласких подовжених пружин, розміщених з двох сторін лопаті та закріплених одним кінцем на пересувному елементі, який має можливість пересуватися вздовж подовжньої осі важеля, а приводом пересувного елемента служить лінійний електромагнітний двигун.
Текст
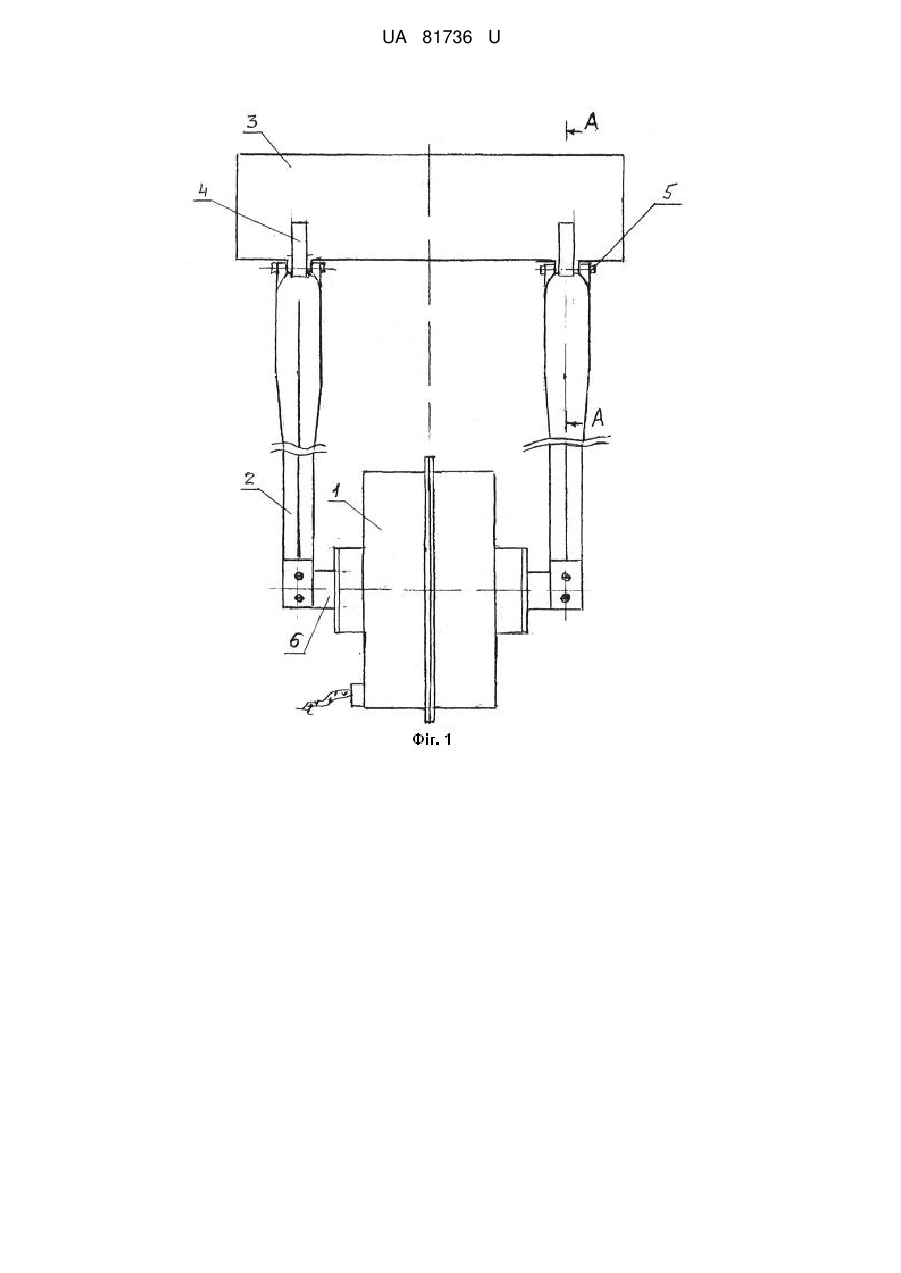
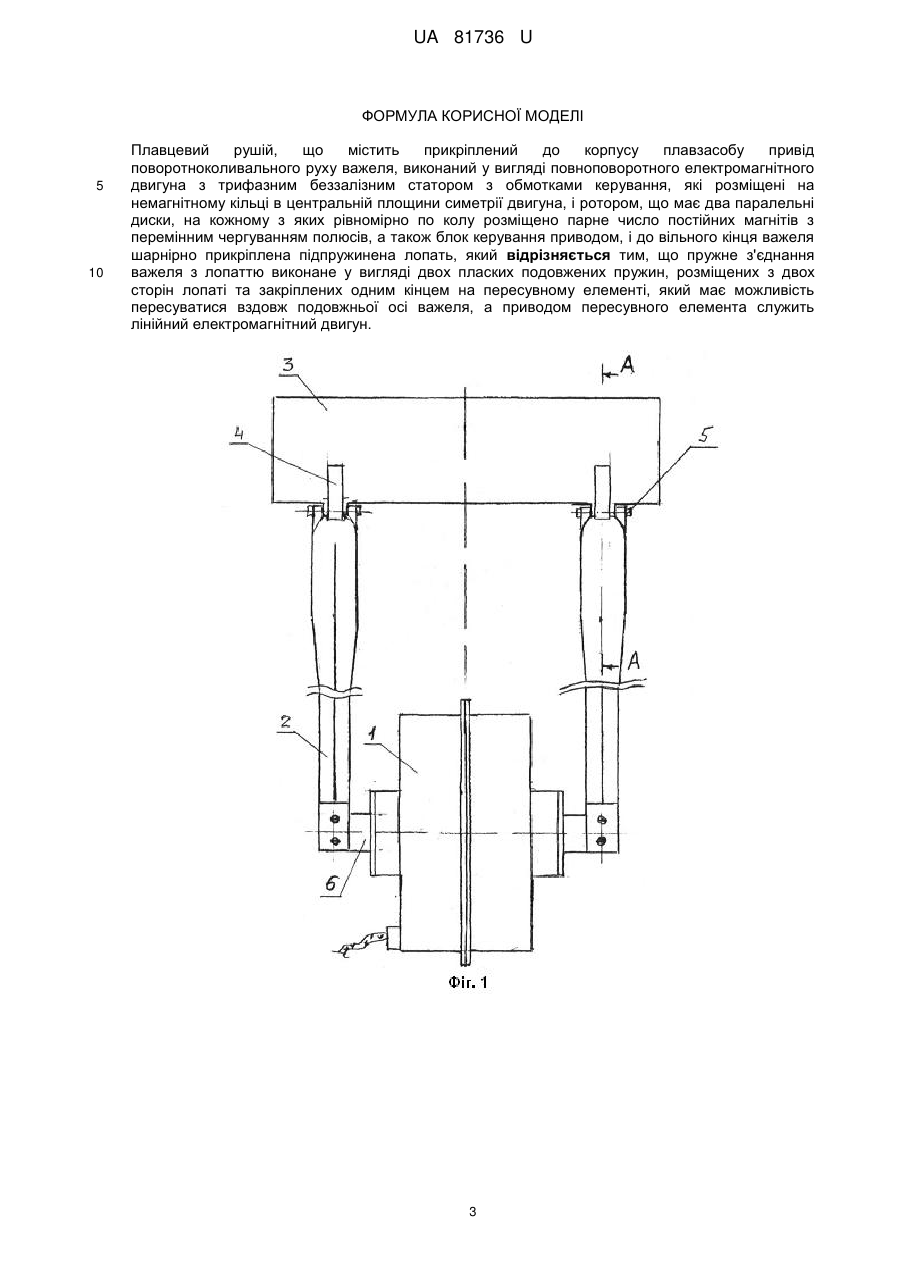
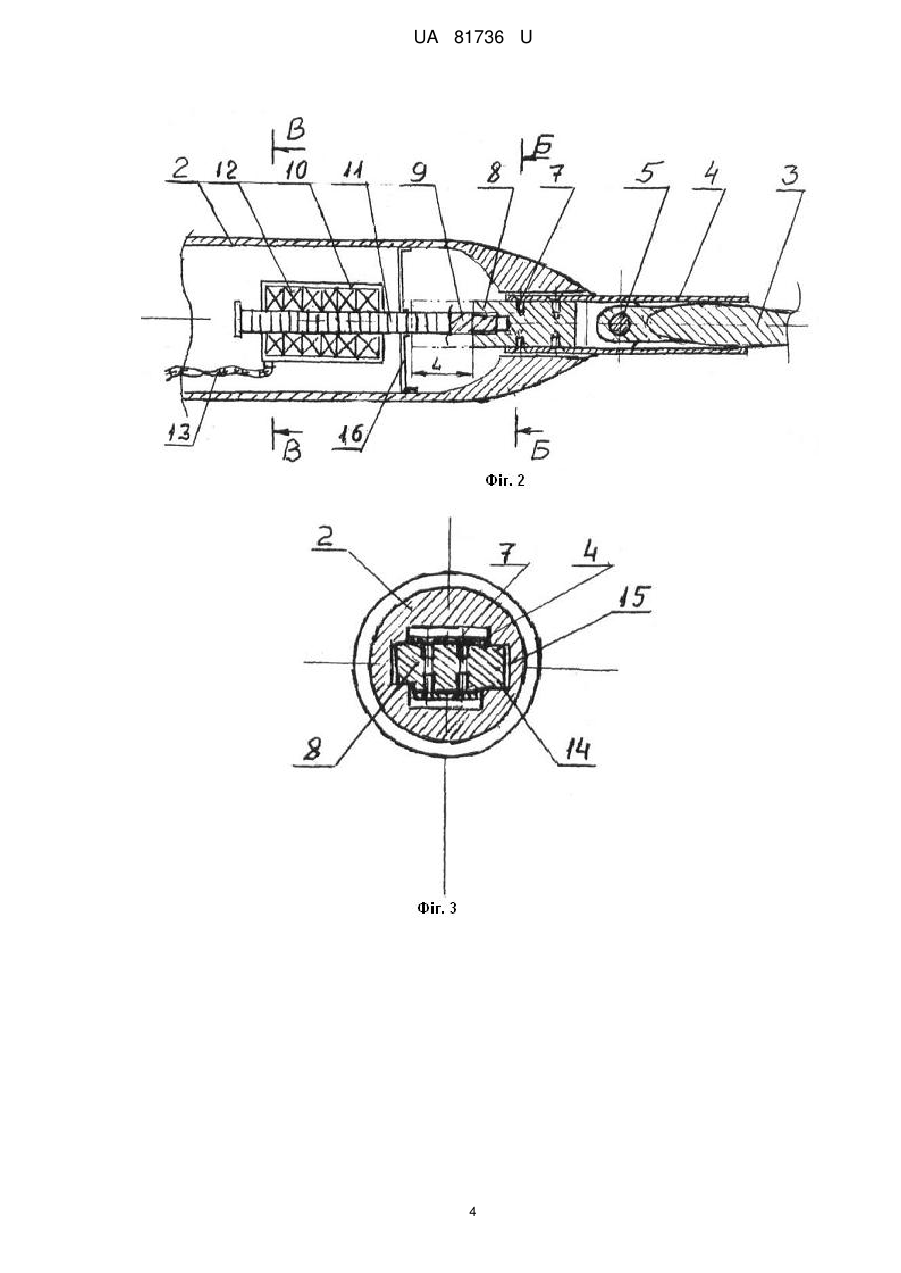
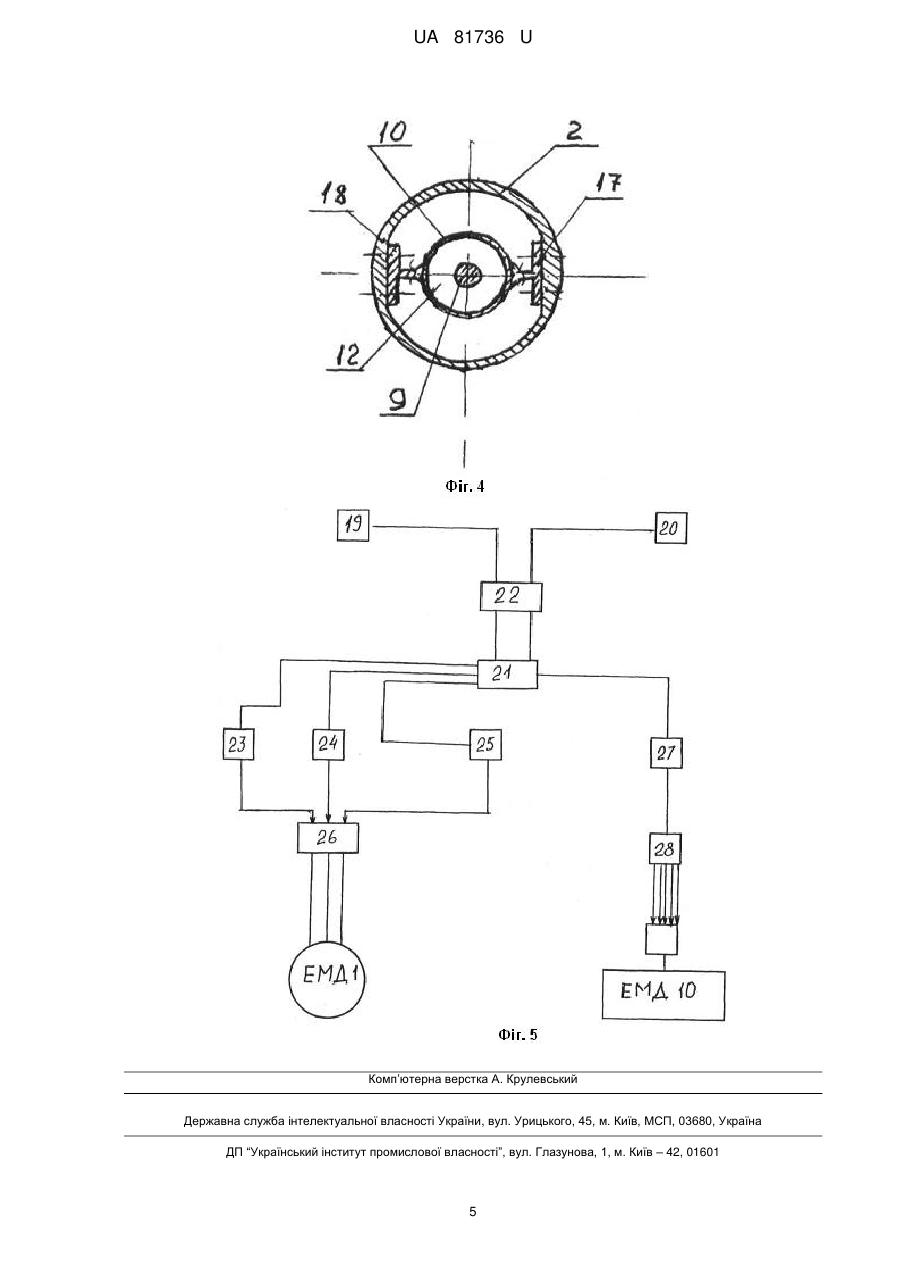
Реферат: Плавцевий рушій містить прикріплений до корпусу плавзасобу привід поворотноколивального руху важеля, виконаний у вигляді повноповоротного електромагнітного двигуна з трифазним беззалізним статором з обмотками керування, які розміщені на немагнітному кільці в центральній площини симетрії двигуна, і ротором, що має два паралельні диски, на кожному з яких рівномірно по колу розміщено парне число постійних магнітів з перемінним чергуванням полюсів, а також блок керування приводом, і до вільного кінця важеля шарнірно прикріплена підпружинена лопать. Пружне з'єднання важеля з лопаттю виконане у вигляді двох пласких подовжених пружин, розміщених з двох сторін лопаті та закріплених одним кінцем на пересувному елементі, який має можливість пересуватися вздовж подовжньої осі важеля. Приводом пересувного елемента служить лінійний електромагнітний двигун. UA 81736 U (54) ПЛАВЦЕВИЙ РУШІЙ UA 81736 U UA 81736 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до суднових рушіїв з робочим органом, що коливається і має вигляд прямокутного чи стрілоподібного крила. Відомі винаходи "Плавцеві рушії", які містять приводний важіль, який встановлений одним кінцем шарнірно на плавальному засобі з можливістю виконання кутових коливальних рухів, на вільному кінці якого пружно закріплене з можливістю повороту жорстке крило з симетричним профілем [1, 2]. Але відомий також і винахід "Спосіб регулювання тяги суднового рушія" у вигляді жорсткого крила, що виконує лінійні коливання у вертикальній або горизонтальній площині з одночасним кутовим коливанням відносно своєї передньої кромки [3], в якому для максимізації ефективності роботи рушія пропонується, згідно із заявленим законом, керувати амплітудою кутових коливань крила в залежності від величини амплітуди лінійних коливань передньої кромки крила А та швидкості руху плавального засобу V. Відомий також "Плавцевий рушій з електромагнітним приводом" [4], що містить прикріплений до корпусу плавзасобу поворотний електромагнітний двигун (ЕМД), який є приводом поворотноколивального руху важеля, до вільного кінця якого шарнірно прикріплена підпружинена лопать, а також блок керування приводом. ЕМД виконано повноповоротним і містить трифазний беззалізний статор з обмотками керування, які розміщені на немагнітному кільці в центральній площини симетрії двигуна, і ротор з двома дисками, на кожному з яких рівномірно по колу розміщено парне число постійних магнітів з перемінним чергуванням полюсів, а блок керування приводом містить мікропроцесор, напівпровідниковий комутатор фаз обмоток статора і систему контролю положення ротора, причому датчик положення ротора цієї системи через вхідний пристрій зв'язаний з мікропроцесором. Конструкція приводу цього рушія дозволяє керувати лише величинами амплітуди та частоти лінійних коливань передньої кромки лопаті. Недоліками зазначеного рушія є неможливість керувати амплітудою кутових коливань лопаті (або крила), що призводить до неможливості отримати при різних режимах роботи плавцевого рушія максимальних величин тяги та коефіцієнту корисної дії (ККД) рушія. Задача, що вирішується пропонованою корисною моделлю - підвищення ефективності роботи плавцевого рушія за рахунок удосконалення конструкції вузла пружного з'єднання лопаті та важеля, в результаті чого з'являється можливість керування законом кутового коливання лопаті відносно важеля плавцевого рушія, що дозволить усунути наведені вище недоліки плавцевого рушія - прототипу (найближчого аналога). Поставлена задача вирішується тим, що в плавцевому рушії, що містить прикріплений до корпуса плавзасобу привід поворотноколивального руху важеля, виконаний у вигляді електромагнітного двигуна з трифазним беззалізним статором з обмотками керування, які розміщені на немагнітному кільці в центральній площини симетрії двигуна, і з ротором, що має два паралельні диски, на кожному з яких рівномірно по колу розміщено парне число постійних магнітів з перемінним чергуванням полюсів, а також блок керування приводом, і до вільного кінця важеля шарнірно прикріплена підпружинена лопать, пружне з'єднання важеля з лопаттю виконане у вигляді двох пласких подовжених пружин, розміщених з двох сторін лопаті та закріплених одним кінцем на пересувному елементі, який має можливість пересуватися вздовж подовжньої осі важеля, а приводом пересувного елемента служить лінійний електромагнітний двигун. Використання як привода важеля плавцевого рушія ЕМД, описаної вище конструкції, дозволяє одержати будь-який (у тому числі найбільш оптимальний для будь-якого режиму руху плавального засобу) закон коливання приводного важеля плавцевого рушія (тобто і передньої кромки лопаті), а використання з'єднання з керованою перемінною пружністю між важелем та лопаттю дозволяє одержати найбільш оптимальний для будь-якого режиму руху плавального засобу закон кутового коливання лопаті відносно важеля, що дозволить підвищити ККД плавцевого рушія в цілому. Суть корисної моделі пояснюється кресленнями. На фіг. 1 представлений вигляд плавникового рушія в плані; на фіг. 2 - вигляд плавцевого рушія збоку з розрізом важеля та рушія по перерізу А-А на фіг. 1; на фіг. 3 - розташування пересувного елемента з пружинами відносно корпусу важеля плавцевого рушія по перерізу Б-Б на фіг. 2; на фіг. 4 - розташування лінійного електромагнітного двигуна у корпусі важеля плавцевого рушія по перерізу В-В на фіг. 2; на фіг. 5 - функціональна схема блока керування плавцевим рушієм. Плавцевий рушій (фіг. 1) містить ЕМД 1 повноповоротного типу, важелі 2, лопать 3 і пружинні обмежувачі 4 повороту лопаті 3 відносно важеля 2. Лопать 3 шарнірно за допомогою осей 5 прикріплена до вільних кінців важелів 2. Другі кінці важелів 2 жорстко закріплені на кінцях валу 6 ротора ЕМД 1. Пружинні обмежувачі 4 виконані у вигляді пласких пружин, які закріплені гвинтами 7 з обох сторін пересувного елемента 8 (фіг. 2). Пересувний елемент 8 з'єднаний жорстко з ротором 9 1 UA 81736 U 5 10 15 20 25 30 35 40 45 50 55 лінійного ЕМД 10. Ротор 9 виконано з магнітного матеріалу (наприклад сталь) з рівномірно розміщеними по його довжині вставками 11 з немагнітного матеріалу (наприклад бронза). В корпусі ЕМД 10 розміщено декілька кільцевих обмоток 12, які разом з корпусом, який виконано з магнітного матеріалу, складають статор ЕМД 10. Живлення до обмоток 12 надходить по кабелю 13. Пересувний елемент 8 має з обох боків виступи-повзуни 14 (фіг. 3), які розміщуються у пазах 15 вільного кінця важеля 2. Між вузлом з'єднання пересувного елемента 8 з вільним кінцем важеля 2 та ЕМД 10 лінійного типу розміщена водонепроникна мембрана 16 (фіг. 2). Лінійний ЕМД 10 кріпиться всередині важеля 2 вздовж його подовжньої осі за допомогою опор 17 на стінках важеля 2, які у місцях кріплення ЕМД мають потовщення 18 з пласкими поверхнями (фіг.4). Для керування законом кутових коливань важеля 2 плавцевого рушія (тобто ротора ЕМД 1) та величини кутових коливань лопаті 3 відносно важеля 2 до складу плавцевого рушія входить система контролю положення ротора ЕМД 1 та лопаті 3, вимірювальна частина якої знаходиться усередині ЕМД 1 (датчик 19 положення ротора), та на вільному кінці важеля 2 на осі 5 (датчик 20 кутового переміщення хорди профілю лопаті 3 відносно нейтрального її положення, яке співпадає з подовжньою віссю важеля 2). Сигнали від датчиків 19 і 20 надходять у блок керування законом коливання лопаті. Блок керування приводом плавцевого рушія (фіг. 5) містить мікропроцесор 21, вхідний пристрій 22, вихідні пристрої 23, 24, 25 з напівпровідниковим комутатором фаз 26 обмоток статора ЕМД 1 та вихідний пристрій 27 з напівпровідниковим комутатором фаз 28 обмоток 12 статора ЕМД 10. Працює плавцевий рушій у такий спосіб. При подачі позитивної напруги на обмотки першої фази ЕМД 1 в результаті взаємодії магнітного поля постійних магнітів і магнітного поля збудженої фази ротор двигуна займе положення магнітної рівноваги щодо котушок збудженої фази. Потім при відключенні першої фаз і включення третьої на негативну напругу ротор ЕМД 1 провернеться на один крок і займе нове положення магнітної рівноваги і т.д. Таким чином, якщо подавати напругу на фази по алгоритму +1,-3, +2,-1, + 3,-2, то ротор двигуна буде повертатися по годинній стрілці, якщо напруга буде подаватися на фази по алгоритму: +1,-2, +3,-1, +2,-3, то ротор буде повертатися проти годинникової стрілки. Відповідно до закону кутового коливання важеля 2 плавцевого рушія (і відповідно кутового руху ротора ЕМД 1) мікропроцесор 21 через вихідні пристрої 23, 24, 25 надає відповідні команди на комутатор фаз 26, що забезпечує коливання важелів 2 у заданому секторі і з заданою частотою й амплітудою, тобто тим самим можна задати будь-який напрямок вектора сили тяги плавцевого рушія, кутові амплітуду і частоту коливань важеля 2 і, відповідно, частоту і лінійну амплітуду коливань передньої кромки лопаті 3. Найбільший кут відхилення лопаті 3 від нейтрального положення відносно важеля 2 буде під час проходження лопаті центральної осі коливань. Під час цього поперечна швидкість лопаті буде найвища і величина швидкісного напору на лопать в цей момент також буде найбільша. При одній і тій же величині швидкісного напору кут відхилення може бути різним в залежності від пружності пружин-обмежувачів, що призводить до зміни ефективності роботи плавцевого рушія [5]. Тому мікропроцесор керує також переміщенням ротора лінійного ЕМД 10, що дозволить задати таку пружність обмежувачів повороту лопаті, яка оптимізує величину амплітуди кутових коливань лопаті 3 відносно важеля 2 (наприклад, згідно із законом, заявленим у [3]). Таким чином, пропонований рушій дозволяє одержати різні закони коливання і приводного важеля і лопаті рушія відносно важеля, забезпечити зміну напрямку і величини вектора сили тяги в площині, перпендикулярній осі ротора ЕМД 1, підвищити ККД рушія за рахунок оптимізації величин лінійної і кутової амплітуд коливання лопаті. Джерела інформації: 1. А.С. СРСР№ 1705183 А1 (15.09.91 р.), МПК В63Н 1/36 2. А.С. СРСР № 1735116 А1 (22.01.92 р.), МПК В63Н 1/36 3. А.С. СРСР № 1615056 А1 (12.09.90 р.), МПК В63Н 1/36 4. Патент України на корисну модель № 39458 U (25.02.2009 р.), МПК В63Н 1/36, 1/00 найближчий аналог. 5. В.Н. Глушко, В.П. Каян Исследование работы плавникового движителя с упругим закреплением лопасти // ж. Прикладная гидромеханика (в печати). 2 UA 81736 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Плавцевий рушій, що містить прикріплений до корпусу плавзасобу привід поворотноколивального руху важеля, виконаний у вигляді повноповоротного електромагнітного двигуна з трифазним беззалізним статором з обмотками керування, які розміщені на немагнітному кільці в центральній площини симетрії двигуна, і ротором, що має два паралельні диски, на кожному з яких рівномірно по колу розміщено парне число постійних магнітів з перемінним чергуванням полюсів, а також блок керування приводом, і до вільного кінця важеля шарнірно прикріплена підпружинена лопать, який відрізняється тим, що пружне з'єднання важеля з лопаттю виконане у вигляді двох пласких подовжених пружин, розміщених з двох сторін лопаті та закріплених одним кінцем на пересувному елементі, який має можливість пересуватися вздовж подовжньої осі важеля, а приводом пересувного елемента служить лінійний електромагнітний двигун. 3 UA 81736 U 4 UA 81736 U Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюFin propeller
Автори англійськоюHlushko Valentyn Mykolaiovych, Kaian Volodymyr Pavlovych
Назва патенту російськоюПлавниковый движитель
Автори російськоюГлушко Валентин Николаевич, Каян Владимир Павлович
МПК / Мітки
Код посилання
<a href="https://ua.patents.su/7-81736-plavcevijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Плавцевий рушій</a>
Плавцевий рушій з електромагнітним приводом
Номер патенту: 39458
Опубліковано: 25.02.2009
Автори: Гребеніков Віктор Володимирович, Каян Володимир Павлович, Афонін Анатолій Олексійович
МПК: B63H 1/00
Мітки: плавцевий, рушій, електромагнітним, приводом
Формула / Реферат:
Плавцевий рушій з електромагнітним приводом, що містить прикріплений до корпусу плавзасобу поворотний електромагнітний двигун, який є приводом поворотноколивального руху важеля, до вільного кінця якого шарнірно прикріплена підпружинена лопать, а також блок керування приводом, який відрізняється тим, що електромагнітний двигун виконано повноповоротним і він містить трифазний беззалізний статор з обмотками керування, які розміщені на...
Плавцевий рушій
Номер патенту: 39457
Опубліковано: 25.02.2009
Автори: Глушко Валентин Миколайович, Каян Володимир Павлович
МПК: B63H 1/00
Формула / Реферат:
1. Плавцевий рушій, що містить привідний важіль, встановлений з можливістю кутового коливального руху, на кінці якого пружно закріплена з можливістю повороту П-подібна рама з пружною пластиною, який відрізняється тим, що пластина має прямокутну форму в плані і виконана з тонкого пружного металу, а на передній і задній кромках пластини жорстко закріплені осі, кінці яких шарнірно встановлені в опорах П-подібної рами, причому опори задньої осі...
Плавцевий рушій апарата
Номер патенту: 25355
Опубліковано: 30.10.1998
Автори: Коробов Віталій Ілліч, Бабенко Віктор Вітальович, Поліщук Сергій Володимирович
МПК: B63H 1/36
Мітки: апарата, рушій, плавцевий
Формула / Реферат:
Плавниковый движитель аппарата, содержащий стебель со встроенным в нем электродвигателем, отличающийся тем, что последний имеет выходные оси, размещенные перпендикулярно продольной оси подводного аппарата, переходящие в двуплечий рычаг, соединенный с плавниковым движителем, а последний имеет в своем теле электродвигатель с шестерней, расположенной между рейками, соединенными посредством фигурных рычагов с пластинами.
Плавцевий рушій
Номер патенту: 25621
Опубліковано: 30.10.1998
Автори: Коробов Віталій Ілліч, Бабенко Віктор Вітальович, Поліщук Сергій Володимирович
МПК: B63H 1/36
Формула / Реферат:
Плавниковый движитель, содержащий крыло со встроенным в нем электроприводом, отличающийся тем, что в прорези торцевой поверхности крыла установлен диск, связанный системой шкивов и тросиков с валом электродвигателя вращательного движения, а на торцевой поверхности крыла имеется выступ с отверстием, в котором расположена заслонка, связанная с рычагом сердечника электромагнита, причем отверстие через внутрикрыловую полость соединено с выемкой...
Складений плавцевий рушій
Номер патенту: 25356
Опубліковано: 30.10.1998
Автори: Коробов Віталій Ілліч, Поліщук Сергій Володимирович, Бабенко Віктор Вітальович
МПК: B63H 1/36
Мітки: плавцевий, рушій, складений
Формула / Реферат:
Составной плавниковый движитель, содержащий стебель со встроенным в нем электродвигателем и многосоставное крыло, отличающийся тем, что в передней части крыла расположены соленоиды с сердечником и перемычка, которая с помощью прорези соединена со средней частью крыла, которая в свою очередь содержит соленоиды с сердечником и перемычку, которая с помощью прорези соединена с задней частью крыла, а электродвигатель стебля своим валом жестко...
Попередній патент: Пристрій для зчитування інформації з профільного металевого носія
Наступний патент: Спосіб зближення дистальних головок плеснових кісток
Випадковий патент: Пристрій для виготовлення стандартизованих за товщиною пластинчастих епоксидних шліфів