Обертова гвинтова машина та спосіб перетворення рухів у ній

Формула / Реферат
1. Спосіб перетворення руху в об'ємній гвинтовій машині, при цьому машина має принаймні дві групи сполучених елементів (80, 70, 60, 50), при цьому кожна група має перший елемент (80, 60), що має внутрішню гвинтову поверхню (180, 160), співвісну з першою віссю, що проходить крізь центр О, і другий елемент (70, 50), що має зовнішню гвинтову поверхню (270, 250), співвісну з другою віссю, що проходить крізь центри Оm2, Оm1 у двох групах відповідно, при цьому внутрішня група (50, 60) сполучених елементів розташована принаймні в одній порожнині другого елемента зовнішньої групи (80, 70) сполучених елементів, причому перша і друга осі, що проходять крізь центри О; Оm1, Оm2, паралельні, і принаймні один елемент з першого і другого елементів кожної групи виконаний з можливістю повороту навколо своєї осі, причому спосіб включає одночасне приведення в обертальний рух принаймні одного елемента в кожній групі.
2. Спосіб за п. 1, який відрізняється тим, що кожна група має елемент, співвісний з віссю, яка збігається з головною віссю машини, а відповідний другий елемент кожної групи співвісний з віссю, яка не збігається з головною віссю, і при цьому спосіб додатково включає приведення осей, які не збігаються, в обертання навколо головної осі таким чином, що зберігається взаємна відстань осей, що не збігаються, одна відносно одної і відносно головної осі.
3. Спосіб за п. 1 або 2, який відрізняється тим, що перші осі кожної групи сполучених елементів збігаються, при цьому другі осі не збігаються або другі осі кожної групи сполучених елементів збігаються, а перші осі не збігаються, та тим, що спосіб додатково включає приведення осей, що не збігаються і що проходять крізь центри Оm1, Оm2, в обертання навколо осей, що збігаються і що проходять крізь центр О таким чином, що зберігається взаємна відстань осей, що не збігаються і що проходять крізь центри Оm1, Оm1, одна відносно одної і відносно осей, що збігаються і що проходять крізь центр О.
4. Спосіб за п. 2 або 3, який відрізняється тим, що включає синхронізацію руху елементів різних груп сполучених елементів навколо їхніх відповідних осей за допомогою застосування принаймні одного синхронізуючого керуючого пристрою (21, 22).
5. Спосіб за будь-яким із пп. 1-4, який відрізняється тим, що включає механічну синхронізацію з першою групою, яка включає а) обертання першого елемента однієї групи сполучених елементів навколо першої осі, b) обертання другого елемента однієї групи сполучених елементів навколо другої осі, c) обертання першої осі навколо другої осі або обертання другої осі навколо першої осі, або принаймні двох обертань з відповідним одним обертанням з другої групи обертань, яка включає d) обертання першого елемента другої групи сполучених елементів навколо першої осі, e) обертання другого елемента другої групи сполучених елементів навколо другої осі.
6. Спосіб за п. 5, який відрізняється тим, що включає приведення у планетарний рух елемента кожної з першої та другої груп сполучених елементів та одночасну синхронізацію обертань осей елементів, що планетарно рухаються, з першої та другої груп, та синхронізацію обертань елементів, що планетарно рухаються, навколо їхніх відповідних осей.
7. Спосіб за п. 5, який відрізняється тим, що включає приведення в рух з різною швидкістю принаймні одного елемента з першої та другої груп сполучених елементів, синхронізацію обертань осей перших елементів з першої та другої груп та синхронізацію обертань осей других елементів з першої та другої груп.
8. Спосіб за п. 5, який відрізняється тим, що включає приведення у планетарний рух принаймні одного елемента з першої групи сполучених елементів, приведення в рух з різною швидкістю принаймні одного елемента з другої групи сполучених елементів, синхронізацію обертань осей перших елементів першої та другої груп та синхронізацію обертань осей других елементів першої та другої груп.
9. Спосіб за п. 5, який відрізняється тим, що включає приведення в планетарний рух принаймні одного елемента першої групи сполучених елементів, приведення в рух з різною швидкістю принаймні одного елемента з другої групи синхронізуючим з'єднувальним зв'язком (Оm1-0; Оm2-0) та синхронізацію обертання осі елемента першої групи сполучених елементів з обертанням синхронізуючого з'єднувального зв'язку другої групи сполучених елементів.
10. Спосіб за будь-яким з пп. 1-9, який відрізняється тим, що включає приведення гвинтових внутрішніх поверхонь (180, 170, 160) перших елементів (80, 70, 60) у механічний контакт з гвинтовими зовнішніми поверхнями (270, 260, 250) других елементів (70, 60, 50), забезпечуючи передавання руху.
11. Об'ємна гвинтова машина обертового типу, що має принаймні дві групи сполучених елементів (80, 70, 60, 50), яка відрізняється тим, що кожна група має перший елемент (80, 60), що має внутрішню гвинтову поверхню (180, 160), і вміщений у ньому другий елемент (70, 50), що має зовнішню гвинтову поверхню (270, 250), причому машина має зовнішню групу сполучених елементів (80, 70) і принаймні одну внутрішню групу сполучених елементів (60, 50), в якій кожна внутрішня група сполучених елементів (60, 50) розміщена в порожнині елемента (70) іншої групи сполучених елементів (80, 70), де кожна група включає елемент, співвісний з віссю, яка збігається з головною віссю машини, де відповідний другий елемент кожної групи співвісний з віссю, яка не збігається з головною віссю, та де осі, які не збігаються, обертаються навколо головної осі таким чином, що зберігається взаємна відстань осей, що не збігаються, одна відносно одної і відносно головної осі.
12. Гвинтова машина за п. 11, яка відрізняється тим, що обертові елементи різних груп сполучених елементів механічно з'єднані один з одним таким чином, що забезпечують синхронізований рух цих елементів.
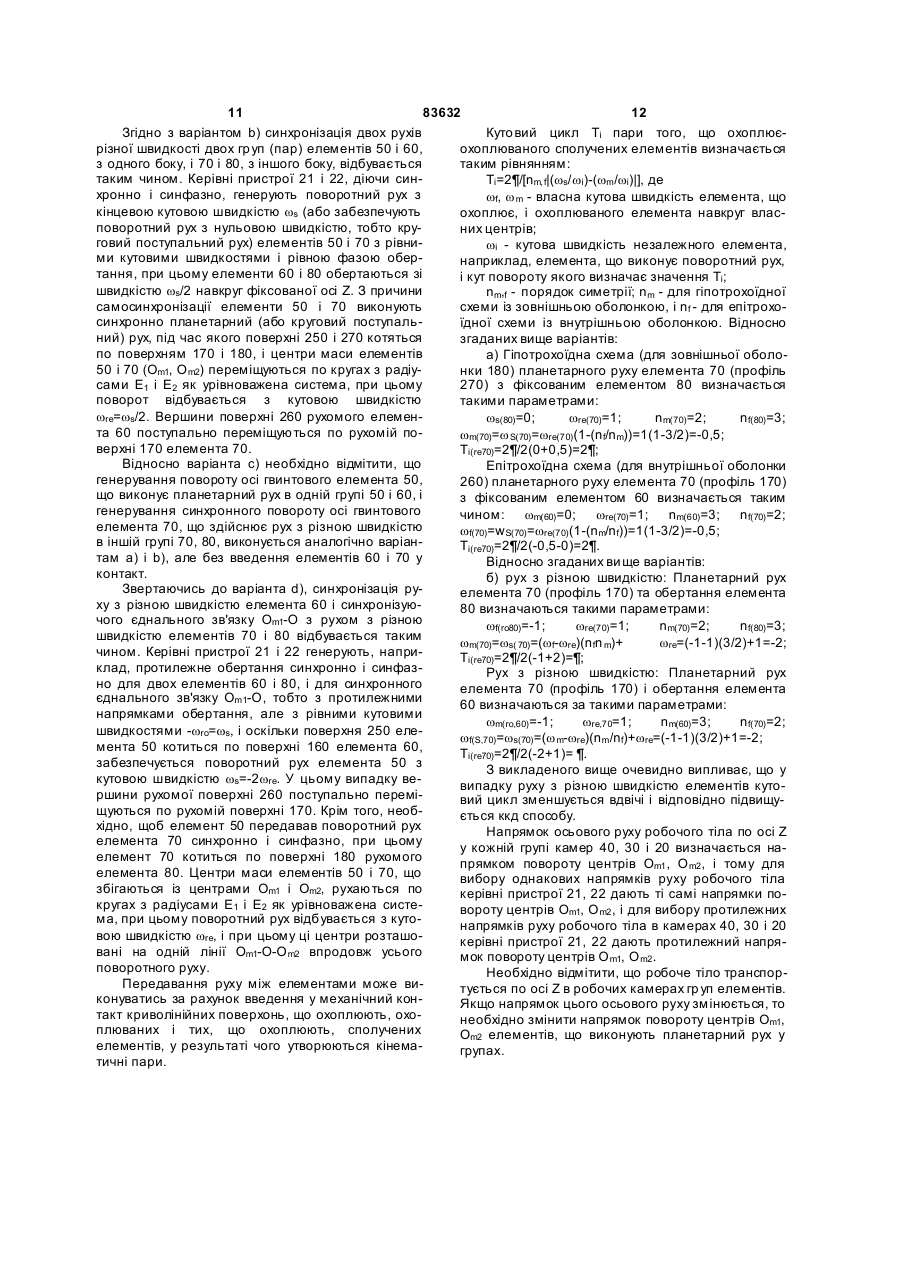
Текст
1. Спосіб перетворення руху в об'ємній гвинтовій машині, при цьому машина має принаймні дві гр упи сполучених елементів (80, 70, 60, 50), при цьому кожна група має перший елемент (80, 60), що має внутрішню гвинтову поверхню (180, 160), співвісну з першою віссю, що проходить крізь центр О, і другий елемент (70, 50), що має зовнішню гвинтову поверхню (270, 250), співвісну з другою віссю, що проходить крізь центри Оm2, О m1 у дво х гр упах відповідно, при цьому внутрішня група (50, 60) сполучених елементів розташована принаймні в одній порожнині другого елемента зовнішньої групи (80, 70) сполучених елементів, причому перша і друга осі, що проходять крізь центри О; Оm1, Оm2, паралельні, і принаймні один елемент з першого і другого елементів кожної групи виконаний з можливістю повороту навколо своєї осі, причому спосіб включає одночасне приведення в обертальний рух принаймні одного елемента в кожній групі. 2. Спосіб за п. 1, який відрізняється тим, що кожна група має елемент, співвісний з віссю, яка збігається з головною віссю машини, а відповідний другий елемент кожної групи співвісний з віссю, яка не збігається з головною віссю, і при цьому спосіб додатково включає приведення осей, які не збігаються, в обертання навколо головної осі таким чином, що зберігається взаємна відстань осей, що не збігаються, одна відносно одної і відносно головної осі. 3. Спосіб за п. 1 або 2, який відрізняється тим, що перші осі кожної групи сполучених елементів 2 (19) 1 3 83632 4 8. Спосіб за п. 5, який відрізняється тим, що 11. Об'ємна гвинтова машина обертового типу, що включає приведення у планетарний рух принаймні має принаймні дві групи сполучених елементів (80, одного елемента з першої групи сполучених еле70, 60, 50), яка відрізняється тим, що кожна група ментів, приведення в рух з різною швидкістю примає перший елемент (80, 60), що має внутрішню наймні одного елемента з другої гр упи сполучених гвинтову поверхню (180, 160), і вміщений у ньому елементів, синхронізацію обертань осей перших другий елемент (70, 50), що має зовнішню гвинтоелементів першої та другої гр уп та синхронізацію ву поверхню (270, 250), причому машина має зовобертань осей других елементів першої та другої нішню груп у сполучених елементів (80, 70) і пригруп. наймні одну внутрішню групу сполучених 9. Спосіб за п. 5, який відрізняється тим, що елементів (60, 50), в якій кожна внутрішня група включає приведення в планетарний рух принаймні сполучених елементів (60, 50) розміщена в порожодного елемента першої групи сполучених елеменині елемента (70) іншої групи сполучених елементів, приведення в рух з різною швидкістю принтів (80, 70), де кожна група включає елемент, наймні одного елемента з другої групи синхроніспіввісний з віссю, яка збігається з головною віссю зуючим з'єднувальним зв'язком (Оm1-0; О m2-0) та машини, де відповідний другий елемент кожної синхронізацію обертання осі елемента першої гругрупи співвісний з віссю, яка не збігається з голопи сполучених елементів з обертанням синхронівною віссю, та де осі, які не збігаються, обертазуючого з'єднувального зв'язку другої гр упи сполуються навколо головної осі таким чином, що зберічених елементів. гається взаємна відстань осей, що не збігаються, 10. Спосіб за будь-яким з пп. 1-9, який відрізняодна відносно одної і відносно головної осі. ється тим, що включає приведення гвинтових вну12. Гвинтова машина за п. 11, яка відрізняється трішніх поверхонь (180, 170, 160) перших елементим, що обертові елементи різних груп сполучених тів (80, 70, 60) у механічний контакт з гвинтовими елементів механічно з'єднані один з одним таким зовнішніми поверхнями (270, 260, 250) других чином, що забезпечують синхронізований рух цих елементів (70, 60, 50), забезпечуючи передавання елементів. руху. Винахід відноситься до способу перетворення руху в об'ємній гвинтовій машині обертового типу і до цієї обертової гвинтової машини. Об'ємні гвинтові машини обертового типу мають сполучені гвинтові елементи, а саме: гвинтовий елемент, що охоплює, та охоплюваний гвинтовий елемент. Перший (що охоплює) гвинтовий елемент має внутрішню гвинтову поверхню (поверхню, що о хоплює), і др угий (о хоплюваний) гвинтовий елемент має зовнішню гвинтову поверхню (охоплювану поверхню). Гвинтові поверхні є нециліндричними і обмежують елементи у радіальному напрямку. Вони зцентровані навкруг відповідних осей, які паралельні і які звичайно не збігаються, а відстоять одна від одної на довжину E (ексцентриситет). Обертова гвинтова машина об'ємного типу такої конструкції відома з [патенту США №5,439,359], в якій охоплюваний елемент, оточений фіксованим елементом, що охоплює, здійснює планетарний рух відносно елемента, що охоплює. Перша складова цього планетарного руху надає руху осі охоплюваної поверхні, щоб ця вісь описувала циліндр обертання з радіусом E навкруг осі поверхні, що охоплює, що відповідає планетарному руху обертання. Тобто, вісь другого (о хоплюваного) елемента обертається навкруг осі першого (що охоплює) елемента, і вісь останнього залишається головною віссю машини. Друга складова цього планетарного руху надає руху о хоплюваному елементу навкруг осі його гвинтової поверхні. Цю другу складову (перифе рійне обертання) можна також назвати поворотним рухом. Замість забезпечення планетарного руху можна забезпечити рух з різною швидкістю. Для цього звичайно використовують синхронізуючі єднальні зв'язки. Але машини можуть також самосинхронізуватись за рахунок відповідних гвинтових поверхонь. Обертові гвинтові машини об'ємного типу згаданого вище виду використовують для перетворення енергії робочої речовини (середовища), газоподібної або рідкої, шляхом розширення, витиснення або стиснення робочого середовища у механічну енергію, або навпаки, для компресорів, насосів та ін. Наприклад, їх застосовують у забійних двигуна х при свердлінні на нафту, газ, або для геотермального свердління. У більшості випадків гвинтові поверхні мають циклоїдні (трохоїдні) форми, відомі, наприклад, з [патенту Франції FR-A-997957 та патенту США №3,975,120]. Використовуване в електродвигунах перетворення руху описане, наприклад, у [V. Tiraspolskyi, "Hydraulical Downhole Motors in Drilling", the course of drilling, p.258-259, published by Edition TECHNIP, Paris]. Ефективність цього способу перетворення руху у гвинтови х машинах відомого рівня техніки визначається інтенсивністю термодинамічних процесів, що відбуваються у машині, і характеризується узагальненим параметром "кутового циклу". Цей цикл дорівнює куту повороту будь-якого поворотного елемента (охоплюваного, того, що охоп 5 83632 6 лює; або синхронізуючого зв'язку), вибраного як Тому даний винахід більш ефективно викориселемент з незалежним ступенем свободи. товує конструкційний об'єм машини, забезпечуючи Куто вий цикл дорівнює куту повороту елеменодночасно підвищену кількість робочих (витиската з незалежним ступенем свободи, при якому льних) камер і більшу кількість робочих циклів із виконується повний період зміни площі поперечнорозрахунку на один поворот приводного вала, в го перерізу (або повного відкриття та закриття) результаті чого підвищується ккд. робочої камери, утворюваної охоплюваним або Відповідно до кращого варіанта здійснення тим, що охоплює, елементами, і також відбуваєтьвинаходу рух елементів синхронізований таким ся осьове переміщення робочої камери на один чином, щоб забезпечувати при цьому динамічно період Рm у машинах із внутрішньою гвинтовою збалансовану машину. Для цього доцільно здійсповерхнею, або на один період Pf у машинах із нювати механічний зв'язок поворотних елементів. зовнішньою гвинтовою поверхнею. Відомі способи Цей варіант здійснення має ту перевагу, що перетворення руху в об'ємних гвинтових машинах машина діє більш стабільно, і потрібне менше зуобертового типу зі сполученими елементами крисилля для стабілізації усієї конструкції машини, волінійної форми, здійснювані в аналогічних об'тобто опора машини не обов'язково має бути надємних машинах, мають такі недоліки: то важкою або ускладненою. - обмежений технічний потенціал з причини Як зазначено вище, осі деяких елементів різнедосконального способу організації руху, який не них груп (що утворюють першу групу) збігаються (з збільшує кількість кутових циклів із розрахунку на головною віссю машини), причому осі інших елеодин поворот приводного елемента з незалежним ментів не збігаються з головною віссю і більшою ступенем свободи; мірою не збігаються одна з одною. У більшості - обмежена питома потужність аналогічних випадків або перші осі кожної групи сполучених гвинтових машин; елементів збігаються одна з одною, або збігається - обмежений ккд; друга вісь кожної групи сполучених елементів. - наявність протидіючих зусиль, що виникають Тільки у рідких випадках варіант здійснення цієї на фіксованому корпусі машини. машини передбачає конструкцію, в якій вісь перЗадача цього винаходу полягає у вирішенні шого елемента першої групи сполучених елеменпроблеми розширення технічних і функціональних тів збігається з віссю другого елемента другої групотенційних можливостей способу перетворення пи сполучених елементів. Відповідно до кращого руху у гвинтови х машинах, та у підвищенні питомої варіанта здійснення осі, що не збігаються, поверпотужності й продуктивності гвинтових машин; у таються таким чином навкруг осі, що збігається зменшенні загальних теплових втрат, і у зменшен(навкруг головної осі), що зберігають взаємну відні протидій на опорах об'ємних гвинтови х машин. стань осей, що не збігаються, відносно одна одної Винахід забезпечує обертову гвинтову машиі відносно осі, що збігається (головної осі). ну, яка має принаймні дві групи сполучених елеЗа рахунок цієї особливості елементи можна ментів, кожна з яких має перший елемент, що має розташувати таким чином, щоб центр маси (центр внутрішню гвинтову поверхню, і вміщений у ньому ваги зрізу елемента) усієї конструкції розташовудругий елемент, що має зовнішню гвинтову повервався у головній осі. Якщо взаємна відстань осей, хню; причому машина має зовнішню групу сполущо не збігаються, зберігається, то можна запобігти чених елементів і принаймні одну внутрішню гр упу зсуву центру маси, тобто його переміщенню. Тим сполучених елементів; при цьому кожна внутрішня самим зберігається взаємовідношення мас елемегрупа сполучених елементів встановлена у порожнтів, які мають осі, що не збігаються, і центри маси нині елемента другої гр упи сполучених елементів. елементів з осями, що збігаються, при цьому буГрупи сполучених елементів розташовані співвісно дуть розташовані у головній осі. у порожнинах одна одної. Цей спосіб можна також допрацювати, щоб Необхідно відмітити, що один елемент може рух елементів різних груп сполучених елементів бути частиною двох різних груп. Цей елемент монавкруг їх відповідних осей був також синхронізоже мати і зовнішню гвинтову поверхню, і внутріваний, тобто синхронізований поворотний рух шню гвинтову поверхню, перебуваючи при цьому елементів (окрім синхронізації їх обороту). другим елементом для зовнішньої групи сполучеЦю синхронізацію можна забезпечити декільних елементів і першим елементом для внутрікома способами. шньої групи сполучених елементів одночасно. Звичайно можна вибрати два види обертання Елементи взаємодіють переважно у порожнинах першої групи обертань: а) обертання першого одна одної. елемента однієї групи сполучених елементів навкВідповідно, у способі перетворення руху в об'руг першої осі; b) обертання другого елемента ємній гвинтовій машині використовується машина однієї групи сполучених елементів навкруг другої згаданого вище типу; при цьому осі першого і друосі, та с) обертання першої осі навкруг другої осі, гого елементів паралельні; і принаймні один елеабо обертання другої осі навкруг першої осі. Ці два мент з числа першого і другого елементів кожної види обертання потім можна (механічно) синхронігрупи виконаний з можливістю повороту навкруг зувати із відповідним одним обертанням з числа його осі. Згідно з винаходом створюється обертаобертань другої гр упи, що містять d) обертання льний рух принаймні одного елемента у кожній першого елемента другої групи сполучених елегрупі. Відповідно до кращого варіанта здійснення ментів навкруг першої осі, та e) обертання другого створюється планетарний рух принаймні одного елемента іншої групи сполучених елементів навкелемента у кожній групі. руг др угої осі. 7 83632 8 Цей варіант здійснення, викладений вище у внутрішнього охоплення) другої групи трьох спозагальному вигляді, можна підрозділити на чотири лучених елементів навкруг його центральної фікрізних окремих кращих варіанти здійснення. сованої осі, і обертання (або стан нерухомості) Згідно з першим кращим варіантом здійснення третього елемента (синхронізатора) другої групи способу відповідно до цього винаходу перша і друтрьох сполучених елементів навкруг його центрага групи сполучених елементів, кожна, містять льної фіксованої осі; є) обороту осі другого елемеелемент, що рухається планетарно; обертання нта (початкової трохоїди) другої групи навкруг його осей елементів, що рухаються планетарно, першої фіксованої центральної осі на синхронізуючому і другої гр уп синхронізовані (обороти синхронізоєднальному зв'язку; і f) поворотного руху другого вані), обертання елементів, що р ухаються планеелемента другої гр упи. тарно, навкруг їх осей синхронізовані (поворотний Винахід пояснюється у наведеному нижче рух синхронізований). описі його кращого варіанта здійснення з посиланЗгідно з другим кращим варіантом здійснення ням на креслення, на якому: перша і друга гр упи сполучених елементів, кожна, На Фіг. зображений переріз об'ємної гвинтової виконують рух із різною швидкістю, обертання машини обертового типу згідно з цим винаходом, осей перших елементів першої і другої груп синщо використовується для здійснення способу згідхронізовані (обороти синхронізовані), обертання но з цим винаходом. осей других елементів першої і другої гр уп синНа Фіг. показаний поперечний переріз обертохронізовані (інші повороти також синхронізовані). вої гвинтової машини згідно з цим винаходом. Для Згідно з третім кращим варіантом здійснення підвищення ккд і продуктивності об'ємної гвинтової способу відповідно до цього винаходу перша гр упа машини згідно з цим винаходом машина має декісполучених елементів виконує планетарний рух, лька груп охоплюваних елементів (тобто елемендруга гр упа сполучених елементів виконує рух із тів, що мають зовнішню гвинтову поверхню) і елерізною швидкістю; обертання осей перших елемементів, що охоплюють (тобто елементів, що мають нтів першої і другої груп синхронізовані (обороти внутрішню гвинтову поверхню). Дві гр упи сполучесинхронізовані), обертання осей других елементів них елементів 80, 70, з одного боку, і 50, 60, з друпершої і другої груп синхронізовані (інші обороти гого, взаємодіють одна з одною, тобто вн утрішня також синхронізовані). група 50, 60 сполучених гвинтови х елементів знаЗгідно з четвертим кращим варіантом здійсходиться у порожнині гвинтового елемента 70 друнення способу відповідно до цього винаходу пергої гр упи гвинтових елементів. Гвинтові елементи ша група сполучених елементів виконує планетарвстановлені співвісно ("згвинчені") у порожнинах ний рух, др уга гр упа має синхронізуючий один одного. Фактично, можна сказати, що є три єднальний зв'язок для забезпечення руху з різною групи гвинтови х елементів, оскільки гвинтовий швидкістю; обертання осі елемента першої групи елемент 70 також діє як перший елемент, що о хосполучених елементів синхронізоване із обертанплює, і перший елемент 60 іншої групи сполучених ням синхронізуючого єднального зв'язку другої елементів 50, 60 також діє як охоплюваний елегрупи сполучених елементів. мент. Елементи 70 і 60 тому також утворюють груУ всіх варіантах здійснення передавання руху пу сполучених елементів. між елементами груп можна здійснювати шляхом Зовнішній елемент 80 (елемент, що охоплює) введення криволінійних поверхонь, що охоплюють, із внутрішньою гвинтовою поверхнею (внутрішня першого і другого сполучених елементів у механіповерхня, що вміщує) 180, що має порядок симетчний контакт, в результаті чого будуть сформовані рії nt=3, і сполучений з ним елемент 70 (охоплюкінематичні пари. ваний елемент) із зовнішньою гвинтовою поверхЯкщо обертова гвинтова машина описаного нею (зовнішньою поверхнею, що вміщується) 270 у вище типу має три різні групи елементів, то спочавигляді початкової трохоїди, що має порядок ситку можна вибрати наступні три види стану: а) метрії nm=2, утворюють робочі камери 40. Ці елеобертання (або стан нерухомості) першого елемементи можна вважати основною групою внутрінта (що охоплює для зовнішнього охоплення, або шньо сполучених гвинтови х елементів, які охоплюваного для внутрішнього охоплення) однієї встановлені таким чином, що центр O кінцевої групи з трьох елементів навкруг його центральної секції першого елемента 80 збігається із центрафіксованої осі, та обертання (або стан нерухомосльною подовжньою віссю Z гвинтової машини; та ті) третього елемента (синхронізатора) однієї груцентр Оm2 другого елемента 70 зміщений на відпи з трьох елементів навкруг його центральної стань Е2 (ексцентриситет) від осі Z. Для регулюфіксованої осі; b) оборот осі другого елемента (повання руху першого і другого елементів 80, 70 відчаткової трохоїди) однієї групи навкруг його носно фіксованого основного корпусу 9 вони центральної фіксованої осі на синхронізуючому механічно з'єднані із виходами 22' та 22", відповідєднальному зв'язку; с) поворотний рух другого но, керівного пристрою 22. елемента однієї групи за допомогою синхронізуюПерший елемент 60 (елемент, що охоплює) із чого єднального зв'язку (кривошипу) або третього внутрішньою гвинтовою поверхнею 160 у вигляді (охоплюваного) сполученого гвинтового елемента, зовнішньої оболонки, що має порядок симетрії співвісного з першим. Зазначені вище три види nm=3, і внутрішній, другий елемент 50 (охоплювастану потім можна (механічно) синхронізувати, ний елемент) із зовнішньою гвинтовою поверхнею кожний, із відповідним одним станом другої групи 250 у вигляді початкової трохоїди з порядком систанів, що складається із d) обертання (або стану метрії nm=2 утворюють робочі камери 20. Ці еленерухомості) першого елемента (охоплюваного менти можна вважати додатковою групою внутрідля зовнішнього охоплення, або що охоплює для шньо сполучених гвинтових елементів, 9 83632 10 встановлених таким чином, що центр O кінцевої чином, що центр маси елементів 50 і 70, взятих секції першого елемента 60 збігається із центраразом, завжди залишається у центрі O і не зміщульною подовжньою віссю Z гвинтової машини; і ється. центр Оm1 другого елемента 50 зміщений на відДля здійснення взаємозв'язаних рухів елеменстань E1 (ексцентриситет) від осі Z. тів у групах і для одночасної синхронізації рухів Для регулювання руху елементів 60 і 50 відноелементів різних груп включені керівні пристрої 21, сно фіксованого основного корпуса 9 вони механі22. Виходи 21', 21" та 22', 22" керівних пристроїв чно з'єднані із виходами 21' та 22", відповідно, ке21, 22 механічно з'єднані з елементами 50, 60 і 70, рівного пристрою. 80, відповідно. Згідно з цим винаходом керівні Додаткова внутрішня гвинтова поверхня 170 пристрої виконані із можливістю генерування рухів елемента 70 і додаткова зовнішня гвинтова поверз двома ступенями свободи, з яких один є незалехня 260 елемента 60 утворюють додаткові робочі жним. Тобто, вони можуть генерувати планетаркамери 30, в результаті чого загальна кількість ний рух одного елемента групи навкруг іншого фікробочих камер згідно з Фіг. складає дев'ять камер. сованого елемента. Або керівні пристрої можуть (Всередині елементів 80 і 60 утворюються три рогенерувати рух з трьома ступенями свободи, тобто бочі камери, коли елементи 70 і 50 пересуваються ці пристрої виконані з можливістю генерування повідносно положення, показаного на кресленні). різному з'єднаного обертання одного елемента Звичайно кількість пар сполучених гвинтови х навкруг його фіксованих осей, будь-якої обертової елементів може бути будь-якою і обмежується складової планетарного руху-повороту осі другого загальними габаритами машини. елемента навкруг фіксованої осі першого елеменПерший дводуговий елемент 50 (внутрішній та або поворотного руху другого елемента навкруг охоплюваний елемент) сполучений із внутрішнім його власної осі, і обертання синхронізуючого єдтридуговим профілем 160 (зовнішня оболонка сінального зв'язку Оm1-О навкруг фіксованої осі мейства у вигляді тридугового профілю) елемента першого елемента. Тобто, генерується рух елеме60. Цей внутрішній профіль 160 тридугового елентів групи з трьома ступенями свободи, з яких два мента 60 є елементом, що охоплює, для дводугоступеня можна вибрати як незалежні. вого профілю 250 елемента 50, але є охоплюваЗгідно з цим винаходом є чотири різних варіаним елементом для другого дводугового елемента нти перетворення руху елементів машини: 70 із внутрішнім профілем 170 (дводугова початa) генерування повороту осі елемента, що кова трохоїда). Зовнішній тридуговий профіль 260 здійснює планетарний рух (включаючи круговий (внутрішня оболонка сімейства) елемента 60 спопоступальний рух), і генерування першого синхролучена із внутрішнім профілем 170 елемента 70. нного повороту осі елемента іншої групи, аналогіТе саме відноситься і до цього другого дводуговочного тому елементу; го елемента 70, який також є охоплюваним і тим, b) генерування руху з різною швидкістю двох що охоплює, і зовнішні профілі 270 (дводугова гвинтових елементів однієї групи і генерування початкова трохоїда) якого взаємодіють у внутрішсинхронного руху з різною швидкістю двох аналоньому тридуго вому профілі 180 (зовнішня оболонгічних гвинтових елементів іншої групи; ка родини) останнього тридугового елемента 80. c) генерування повороту осі гвинтового елеУ цьому окремому випадку елемент 70 механімента, що виконує планетарний рух в одній групі, і чно з'єднаний з елементом 50 для повороту навкгенерування синхронного повороту осі гвинтового руг осей, що проходять крізь центр Оm2, Оm1, віделемента, що виконує рух з різною швидкістю в повідно; і елемент 60 механічно жорстко з'єднаний іншій групі; з елементом 80, в результаті чого кількість робоd) генерування руху з різною швидкістю зовнічих камер 20, 30, 40 збільшено з трьох до дев'яти. шнього елемента 60 внутрішньої групи елементів Внутрішні і зовнішні поверхні 250, 160, 260, 170, 50, 60 і синхронізуючого єднального зв'язку О m1-О 270, 180 перебувають у механічному контакті, внутрішньої групи, або генерування руху з різною утворюючи при цьому робочі камери 20, 30, 40. швидкістю зовнішнього елемента зовнішньої групи Для механічного з'єднання елементів 50 і 70 70, 80 і синхронізуючого єднального зв'язку О m2-О один з двох елементів 50 або 70 можна виконати зовнішньої групи, з одного боку, та генерування шарнірно на кривошипі синхронізуючого єднальносинхронного руху з різною швидкістю пари гвинтого зв'язку Оm1-О або Оm2-О, що проходить крізь вих елементів іншої гр упи, з другого боку. корпус елемента 50; але це неможливо зробити Згідно з варіантом а) синхронізація двох пладля обох елементів 50, 70 одночасно. З'єднання нетарних рухів елементів 50 і 70 відбувається тавиконане таким чином, що центри Оm1, Оm2 в усіх ким чином. Керівні пристрої 21 і 22, що діють синвипадках розташовані на одній лінії Оm1-O-O m2 на хронно і синфазно, генерують поворотний рух для різних боках центральної подовжньої осі Z, в реелементів 50 і 70 з різними кутовими швидкостями зультаті чого елементи 50, 70 утворюють статично ws і з рівною фазою обертання, і елементи 60 і 80 і динамічно врівноважену обертову систему елезалишаються фіксованими. З причини самосинхментів. Цю рівновагу можна забезпечити шляхом ронізації елементи 50 і 70 синхронно виконують вибору мас елементів 50, 70 таким чином, щоб планетарний рух, під час якого поверхні 250 і 270 центр маси (центр ваги зрізів елемента) елемента котяться по поверхням 160 і 180, і центри маси 70 знаходився на осі, що проходить крізь центр елементів 50 і 70 рухаються по кругах з радіусами Оm2 , і щоб центр маси елемента 50 знаходився в E1 і E2 як урівноважена система; при цьому повоцентрі Оm1; при цьому центр маси елементів 50 і рот відбувається з кутовою швидкістю wre=-2ws. 70, взятих разом, розміщений у центрі O. Тобто, Вершини нерухомої поверхні 260 поступально пезв'язаний рух елементів 50 і 70 здійснюється таким реміщуються по рухомій поверхні 170. 11 83632 12 Згідно з варіантом b) синхронізація двох рухів Куто вий цикл Ti пари того, що охоплюєрізної швидкості двох гр уп (пар) елементів 50 і 60, охоплюваного сполучених елементів визначається з одного боку, і 70 і 80, з іншого боку, відбувається таким рівнянням: таким чином. Керівні пристрої 21 і 22, діючи синTi=2¶/[nm,f|(ws/wі)-(wm/wі)|], дe хронно і синфазно, генерують поворотний рух з wf, w m - власна кутова швидкість елемента, що кінцевою кутовою швидкістю ws (або забезпечують охоплює, і охоплюваного елемента навкруг власповоротний рух з нульовою швидкістю, тобто круних центрів; говий поступальний рух) елементів 50 і 70 з рівниwi - кутова швидкість незалежного елемента, ми кутовими швидкостями і рівною фазою обернаприклад, елемента, що виконує поворотний рух, тання, при цьому елементи 60 і 80 обертаються зі і кут повороту якого визначає значення Ti; швидкістю ws/2 навкруг фіксованої осі Z. З причини nm,f - порядок симетрії; nm - для гіпотрохоїдної самосинхронізації елементи 50 і 70 виконують схеми із зовнішньою оболонкою, і nf - для епітрохосинхронно планетарний (або круговий поступальїдної схеми із внутрішньою оболонкою. Відносно ний) рух, під час якого поверхні 250 і 270 котяться згаданих вище варіантів: по поверхням 170 і 180, і центри маси елементів а) Гіпотрохоїдна схема (для зовнішньої оболо50 і 70 (Оm1, O m2) переміщуються по кругах з радіунки 180) планетарного руху елемента 70 (профіль сами E1 і E2 як урівноважена система, при цьому 270) з фіксованим елементом 80 визначається поворот відбувається з кутовою швидкістю такими параметрами: wre=ws/2. Вершини поверхні 260 рухомого елеменws(80)=0; wre(70)=1; nm(70)=2; nf(80)=3; та 60 поступально переміщуються по рухомій поwm(70)=w S(70)=wre(70) (1-(nf/nm))=1(1-3/2)=-0,5; верхні 170 елемента 70. Ті(rе70)=2¶/2(0+0,5)=2¶; Відносно варіанта с) необхідно відмітити, що Епітрохоїдна схема (для внутрішньої оболонки генерування повороту осі гвинтового елемента 50, 260) планетарного руху елемента 70 (профіль 170) що виконує планетарний рух в одній групі 50 і 60, і з фіксованим елементом 60 визначається таким генерування синхронного повороту осі гвинтового чином: wm(60)=0; wre(70)=1; nm(60)=3; nf(70)=2; елемента 70, що здійснює рух з різною швидкістю wf(70)=wS(70)=wre(70) (1-(nm/nf))=1(1-3/2)=-0,5; в іншій групі 70, 80, виконується аналогічно варіанТi(re70) =2¶/2(-0,5-0)=2¶. там а) і b), але без введення елементів 60 і 70 у Відносно згаданих ви ще варіантів: контакт. б) рух з різною швидкістю: Планетарний рух Звертаючись до варіанта d), синхронізація руелемента 70 (профіль 170) та обертання елемента ху з різною швидкістю елемента 60 і синхронізую80 визначаються такими параметрами: чого єднального зв'язку Оm1-О з рухом з різною wf(ro80) =-1; wre(70) =1; nm(70)=2; nf(80)=3; швидкістю елементів 70 і 80 відбувається таким wm(70)=ws( 70)=(wf-wre)(nfn m)+ wre=(-1-1)(3/2)+1=-2; чином. Керівні пристрої 21 і 22 генерують, наприТі(re70)=2¶/2(-1+2)=¶; клад, протилежне обертання синхронно і синфазРух з різною швидкістю: Планетарний рух но для двох елементів 60 і 80, і для синхронного елемента 70 (профіль 170) і обертання елемента єднального зв'язку Оm1-О, тобто з протилежними 60 визначаються за такими параметрами: напрямками обертання, але з рівними кутовими wm(rо,60)=-1; wre,70=1; nm(60)=3; nf(70)=2; швидкостями -wro=ws, і оскільки поверхня 250 елеwf(S,70)=ws(70)=(w m-wre)(nm/nf)+wre=(-1-1)(3/2)+1=-2; мента 50 котиться по поверхні 160 елемента 60, Тi(re70) =2¶/2(-2+1)= ¶. забезпечується поворотний рух елемента 50 з З викладеного вище очевидно випливає, що у кутовою швидкістю ws=-2wre. У цьому випадку вевипадку руху з різною швидкістю елементів куторшини рухомої поверхні 260 поступально перемівий цикл зменшується вдвічі і відповідно підвищущуються по рухомій поверхні 170. Крім того, необється ккд способу. хідно, щоб елемент 50 передавав поворотний рух Напрямок осьового руху робочого тіла по осі Z елемента 70 синхронно і синфазно, при цьому у кожній групі камер 40, 30 і 20 визначається наелемент 70 котиться по поверхні 180 рухомого прямком повороту центрів Оm1 , О m2 , і тому для елемента 80. Центри маси елементів 50 і 70, що вибору однакових напрямків руху робочого тіла збігаються із центрами Оm1 і Оm2, рухаються по керівні пристрої 21, 22 дають ті самі напрямки покругах з радіусами E1 і E2 як урівноважена систевороту центрів Оm1, О m2 , і для вибору протилежних ма, при цьому поворотний рух відбувається з кутонапрямків руху робочого тіла в камерах 40, 30 і 20 вою швидкістю wre, і при цьому ці центри розташокерівні пристрої 21, 22 дають протилежний напрявані на одній лінії Om1-O-O m2 впродовж усього мок повороту центрів О m1, О m2 . поворотного руху. Необхідно відмітити, що робоче тіло транспорПередавання руху між елементами може витується по осі Z в робочих камерах гр уп елементів. конуватись за рахунок введення у механічний конЯкщо напрямок цього осьового руху змінюється, то такт криволінійних поверхонь, що охоплюють, охонеобхідно змінити напрямок повороту центрів Оm1, плюваних і тих, що охоплюють, сполучених Оm2 елементів, що виконують планетарний рух у елементів, у результаті чого утворюються кінемагрупах. тичні пари. 13 Комп’ютерна в ерстка О. Гапоненко 83632 Підписне 14 Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRotary screw machine and method for transformation of motion in it
Автори англійськоюGorban Alexander
Назва патенту російськоюВращательная винтовая машина и способ преобразования движения в ней
Автори російськоюГорбан Александр
МПК / Мітки
МПК: F04C 11/00, F04C 2/107
Мітки: машина, ній, перетворення, рухів, гвинтова, спосіб, обертова
Код посилання
<a href="https://ua.patents.su/7-83632-obertova-gvintova-mashina-ta-sposib-peretvorennya-rukhiv-u-nijj.html" target="_blank" rel="follow" title="База патентів України">Обертова гвинтова машина та спосіб перетворення рухів у ній</a>
Пристрій перетворення коливних рухів в обертальні
Номер патенту: 73084
Опубліковано: 15.06.2005
Автор: Філіпчук Степан Павлович
МПК: F03D 5/06, F03B 13/12
Мітки: пристрій, обертальні, рухів, перетворення, коливних
Формула / Реферат:
Пристрій перетворення коливних рухів в обертальні, який містить штангу, середня частина якої виконана у вигляді шароподібного елемента, встановленого у сферичну обойму, конусоподібний елемент, прикріплений до нижньої частини штанги, горизонтальну перегородку, зубчаті рейки, що знаходяться у зачепленні з зубчатими колесами обгінної муфти, встановлені на осі і механічно зв`язані з механізмом обертання вихідного вала, який відрізняється тим, що...
Парова гвинтова машина

Номер патенту: 43456
Опубліковано: 17.12.2001
Автори: Бєрєзін Сєргєй Романовіч, Вєдайко Віктор Іосіфовіч, Носков Анатолій Ніколаєвіч, Щєглов Алєксандр Гєоргієвіч
МПК: F01C 1/16
Мітки: машина, гвинтова, парова
Формула / Реферат:
1. Парова гвинтова машина, що містить корпус, в якому розташовані ведучий і ведений гвинти, що знаходяться у зчепленні, та вали яких встановлені в підшипникових вузлах, вихідна і синхронізуюча передачі, за допомогою першої із яких ведучий гвинт зв'язаний з вихідним валом, а за допомогою другої - ведучий і ведений гвинти зв'язані між собою, впускний і випускний патрубки, циліндр для компенсації осьових зусиль, рухома деталь якого зв'язана з...
Механізм для перетворення коливальних рухів в однонаправлений поступальний
Номер патенту: 42967
Опубліковано: 15.11.2001
Автор: Вереітінов Віктор Іванович
МПК: A61F 4/00
Мітки: коливальних, однонаправлений, поступальний, рухів, механізм, перетворення
Формула / Реферат:
Механізм для перетворення коливальних рухів в однонаправлений поступальний, що містить, щонайменше, один плоский стрижневий шарнірний кінематичний ланцюг з однією ведучою ланкою в ланцюг, який відрізняється тим, що одна ведена ланка ланцюга служить плечем тришарнірного шатуна з вільним шарніром поза ланцюгом, де проміжний шарнір тришарнірного шатуна є загальним для шатуна і одного кінця ведучої ланки, де ведуча ланка встановлена з можливістю...
Гвинтова машина

Номер патенту: 24509
Опубліковано: 21.07.1998
Автор: Сотников Віктор Петрович
МПК: F04C 18/08
Формула / Реферат:
Винтовая машина, содержащая размещенные в цилиндрических расточках корпуса ведущий и, по меньшей мере один, ведомый винтовые роторы, которые спрофилированы и установлены как зубчатые зацепления ведущего винтового ротора с каждым из ведомых винтовых роторов, имеющие непрерывную линию контакта сопряженных профилей зубьев, причем соотношение чисел зубьев ведущего, ведомого роторов и числа ведомых роторов удовлетворяют условию замыканию цепочки...
Універсальна безколекторна обертова електрична машина

Номер патенту: 18437
Опубліковано: 15.11.2006
Автори: Флора Юрій Валентинович, Флора Валентин Данилович
МПК: H02K 23/00
Мітки: безколекторна, машина, універсальна, електрична, обертова
Формула / Реферат:
Універсальна безколекторна обертова електрична машина, що містить статор й ротор, причому осердя якоря виконане з двох концентрично розташованих феромагнітних циліндрів з немагнітним зазором між ними, з полюсними наконечниками та робочими повітряними зазорами, на внутрішній поверхні внутрішнього та зовнішній поверхні зовнішнього циліндрів розташована кільцева обмотка якоря із затискачами, а індуктор відділений від якоря повітряними зазорами,...
Попередній патент: Спосіб отримання біологічно активної речовини, біологічно активна речовина і водний екстракт плаценти свині
Наступний патент: Спосіб одержання форми і оланзапіну, сольвати оланзапіну та їх застосування в одержанні безводних форм оланзапіну
Випадковий патент: Склад для створення пінокислоти