Моноімпульсний сумарно-різницевий пеленгатор
Номер патенту: 84609
Опубліковано: 10.11.2008
Автори: Чигирин Олег Трохимович, Остапов Анатолій Олександрович
Формула / Реферат
Моноімпульсний сумарно-різницевий пеленгатор для одночасного вимірювання кутових напрямків на декілька випромінюючих об'єктів в одній площині в межах головної пелюстки пеленгаційної антени, що містить високочастотну антенну систему у складі блока випромінювачів, кільцевого хвилевідного моста, дзеркала, приймач сумарного каналу, який включає змішувач сумарного каналу, місцевий гетеродин, підсилювач проміжної частоти сумарного каналу, перший амплітудний детектор, приймач різницевого каналу, який включає змішувач різницевого каналу, підсилювач проміжної частоти різницевого каналу, схеми складання, в якому перший вихід блока випромінювачів підключений до першого входу кільцевого хвилевідного моста, перший (сумарний) і другий (різницевий) виходи якого підключені відповідно до перших входів змішувача сумарного каналу і змішувача різницевого каналу, до других входів змішувачів підключені відповідно перший і другий виходи місцевого гетеродина, вихід змішувача сумарного каналу через підсилювач проміжної частоти сумарного каналу підключений до входу першого амплітудного детектора, вихід змішувача різницевого каналу підключений до входу підсилювача проміжної частоти різницевого каналу, перший і другий входи блока випромінювачів високочастотної антенної системи з'єднані, відповідно, з першим і другим входами моноімпульсного сумарно-різницевого пеленгатора, який відрізняється тим, що додатково містить подільник потужності, другий амплітудний детектор, приймач парціального каналу у складі змішувача парціального каналу, підсилювача проміжної частоти парціального каналу, третього амплітудного детектора, перший, другий і третій вимірювачі амплітуди, перший і другий блоки калібрування, перший і другий блоки схем порівняння, ділильний пристрій, причому другий вихід блока випромінювачів високочастотної антенної системи підключений до входу подільника потужності, перший і другий виходи якого підключені, відповідно, до другого входу кільцевого хвилевідного моста і першого входу змішувача парціального каналу, другий вхід якого підключений до другого виходу місцевого гетеродина, вихід підсилювача проміжної частоти різницевого каналу підключений до входу другого амплітудного детектора, вихід змішувача парціального каналу, через підсилювач проміжної частоти парціального каналу, підключений до входу третього амплітудного детектора, вихід першого амплітудного детектора через перший вимірювач амплітуди підключений до першого входу ділильного пристрою, вихід третього амплітудного детектора через третій вимірювач амплітуди підключений до другого входу ділильного пристрою, вихід якого підключений до першого входу першого блока схем порівняння, другий вхід якого підключений до виходу першого блока калібрування, вихід другого амплітудного детектора через другий вимірювач амплітуди підключений до першого входу другого блока схем порівняння, другий вхід і вихід якого підключені, відповідно, до першого виходу і входу другого блока калібрування, вихід ![]() рухомої частини антенної системи, перший (знак +) і другий (знак -), виходи першого блока схем порівняння, другий вихід
рухомої частини антенної системи, перший (знак +) і другий (знак -), виходи першого блока схем порівняння, другий вихід ![]() другого блока калібрування підключені відповідно до першого
другого блока калібрування підключені відповідно до першого ![]() , другого (знак +), третього (знак -), четвертого
, другого (знак +), третього (знак -), четвертого ![]() входів схеми складання, вихід якої
входів схеми складання, вихід якої ![]() підключений до виходу сумарно-різницевого пеленгатора.
підключений до виходу сумарно-різницевого пеленгатора.
Текст
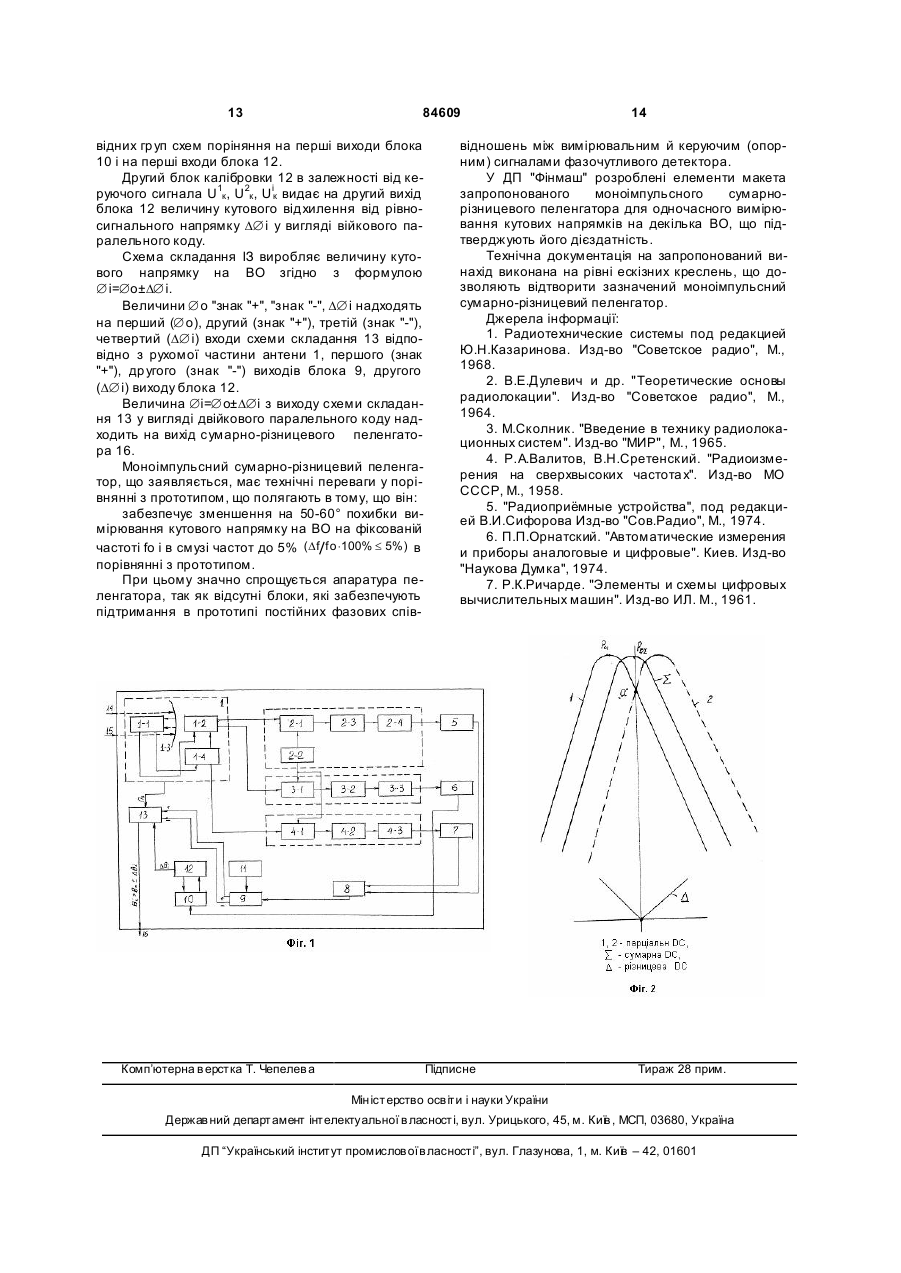
Моноімпульсний сумарно-різницевий пеленгатор для одночасного вимірювання кутових напрямків на декілька випромінюючих об'єктів в одній площині в межах головної пелюстки пеленгаційної антени, що містить високочастотну антенну систему у складі блока випромінювачів, кільцевого хвилевідного моста, дзеркала, приймач сумарного каналу, який включає змішувач сумарного каналу, місцевий гетеродин, підсилювач проміжної частоти сумарного каналу, перший амплітудний детектор, приймач різницевого каналу, який включає змішувач різницевого каналу, підсилювач проміжної частоти різницевого каналу, схеми складання, в якому перший вихід блока випромінювачів підключений до першого входу кільцевого хвилевідного моста, перший (сумарний) і другий (різницевий) виходи якого підключені відповідно до перших входів змішувача сумарного каналу і змішувача різницевого каналу, до други х входів змішувачів підключені відповідно перший і другий виходи місцевого гетеродина, вихід змішувача сумарного каналу через підсилювач проміжної частоти сумарного каналу підключений до входу першого амплітудного детектора, вихід змішувача різницевого каналу підключений до входу підсилювача проміжної частоти різницевого каналу, перший і другий входи блока випромінювачів високочастотної антенної системи з'єднані, відповідно, з першим і другим входами моноімпульсного су 2 (19) 1 3 84609 Пристрій, що пропонується, належить до галузі радіолокаційних і радіонавігаційних вимірювань і може бути застосований при створенні пеленгаторів випромінюючих імпульсних об'єктів (BO) для одночасного визначення кутови х напрямків на декілька BO, які розміщені в одній площині в межах головного пелюстка пеленгаційної антени. У відомих пристроях, моноімпульсних сумарно-різницевих РАС і пеленгаторах для визначення кутового напрямку в одній координатній площині використовуються дві діаграми спрямованості, які пересікаються [1-3]. Моноімпульсний сумарно-різницевий пеленгатор, структурна схема якого наведена на рис.6,34[1], складається з високочастотної антенної системи, до якої входять блок випромінювачів, високочастотна кільцева мостова схема, дзеркало, антенного перемикача, передавача, приймача сумарного каналу у складі змішувача сумарного каналу, гетеродина, підсилювача проміжної частоти сумарного каналу, швидкодіючої системи автоматичного регулювання підсилення (ШАРП), детектора, приймача різницевого каналу у складі змішувача різницевого каналу, підсилювача проміжної частоти різницевого каналу, фазового дискримінатора, слідкуючої системи, при цьому перший A1 і другий А3 виходи блока випромінювачів підключені відповідно до першого (а1) і другого (а2) входів високочастотної кільцевої мостової схеми, перший (сумарний) вихід високочастотної кільцевої мостової схеми підключений до першого входу антенного перемикача, до другого входу якого підключений вихід передавача, другий (різницевий) вихід високочастотної кільцевої мостової схеми підключений до першого входу змішувача різницевого каналу, ви хід антенного перемикача через перший вхід змішувача сумарного каналу, перший вхід підсилювача проміжної частоти сумарного каналу підключений до детектора, ШАРП, першого входу фазового дискримінатора, вихід змішувача різницевого каналу через перший вхід підсилювача проміжної частоти різницевого каналу підключений до другого входу фазового дискримінатора, перший і другий виходи ШАРП підключені відповідно до другого входу підсилювача проміжної частоти сумарного каналу і другого входу підсилювача проміжної частоти різницевого каналу, перший і другий виходи гетеродина підключені відповідно до других входів змішувачів сумарного і різницевого каналів, вихід фазового дискримінатора підключений до входу слідкуючо ї системи, ви хід слідкуючої системи через механічний зв'язок сполучений з дзеркалом антенної системи, перший і другий входи блока випромінювачів, вихід детектора сполучені відповідно з першим і другим входами і виходом сумарно-різницевого пеленгатора. Недоліком сумарно-різницевого пеленгатора, наведеного в [1] є збільшення величини похибки вимірювання кутового напрямку на BO в процесі роботи (експлуатації). Це обумовлено тим, що не залишаються постійними, а змінюються фазові співвідношення поміж сигналів на вимірювальному і керуючому (опорному) входах фазового дискримінатора. 4 Зсув фаз поміж вимірювальним U1 і опорним Uon сигналами повинен дорівнювати 0° або 180°: Uon=Um1 cos wt, U1=Um2 cos (wt) або U1=Um2 cos (wt+180°), щоб похибка, вимірювання кутового напрямку була мінімальною. Моноімпульсний сумарно-різницевий пеленгатор для визначення кутового напрямку в одній площині, структурна схема якого наведена на рис.8-33 [2], складається з високочастотної антенної системи, до якої входять блок випромінювачів, високочастотна кільцева мостова схема, дзеркало, антенного перемикача, передавача, приймача сумарного каналу, приймача різницевого каналу, детектора, фазового детектора, при цьому перший і другий виходи блоку випромінювачів 1,2 підключені відповідно до першого (1) і другого (2) входів високочастотної кільцевої мостової схеми, перший (сумарний) вихід високочастотної кільцевої мостової схеми підключений до першого входу антенного перемикача, до другого входу якого підключений вихід передавача, другий (різницевий) вихід високочастотної кільцевої мостової схеми підключений до першого входу приймача різницевого каналу, вихід антенного перемикача через приймач сумарного каналу підключений до входу детектора, другого входу приймача сумарного каналу, др уго го входу приймача різницевого каналу, другого входу фазового детектора, вихід приймача різницевого каналу підключений до першого входу фазового детектора, перший і другий входи блока випромінювачів, ви ходи детектора і фазового детектора сполучені відповідно з першим і другим входами, першим і другим виходами сумарнорізницевого пеленгатора. Недоліком сумарно-різницевого пеленгатора, наведеного в [2], є збільшення величини похибки вимірювання кутового напрямку на BO в процесі роботи (експлуатації). Це обумовлено тим, що не залишаються постійними, а змінюються фазові співвідношення на. вимірювальному і керуючому (опорному) входах фазового детектора. Зсув фаз поміж вимірювальним U1 і опорним Uon сигналами повинен дорівнювати 0° або 180°, щоб похибка вимірювання кутового напрямку бала мінімальною. За прототип запропонованого винаходу обрано моноімпульсний сумарно-різницевий пеленгатор, наведений на рис.5.9 [3], з якого виключені антенний перемикач і передавач. Це обумовлено тим, що запропонований сумарно-різницевий пеленгатор не випромінює сигналів, а призначений для прийому і вимірювання кутови х напрямків на BO. До складу моноімпульсного сумарнорізницевого пеленгатора (прототипа) входять: високочастотна антенна система у складі блока випромінювачів, кільцевого хвилевидного моста, дзеркала, приймач сумарного каналу у складі змішувача сумарного каналу, місцевого гетеродина, підсилювача проміжної частоти сумарного каналу, амплітудного детектора, приймач різницевого каналу у складі змішувача різницевого каналу, підсилювача проміжної частоти різницевого каналу, фазочутли вого детектора, схема складання, гене 5 84609 ратор розгортки, індикатор типа А, при цьому перший і другий виходи блока випромінювачів підключені відповідно до першого і другого входів кільцевого, хвилевидного моста, перший (сумарний) і другий (різницевий) виходи якого підключені відповідно до перших входів змішувача сумарного і змішувача різницевого каналів, до други х входів змішувачів підключені відповідно перший і другий виходи місцевого гетеродина, вихід змішувача сумарного каналу через підсилювач проміжної частоти сумарного каналу підключений до першого входу фазочутливого детектора і входу амплітудного детектора, вихід змішувача різницевого каналу через підсилювач проміжної частоти різницевого каналу, підключений до . другого входу фазочутли вого детектора, виходи фазочутливого детектора і генератора розгортки підключені відповідно до першого і другого входів схеми складання, виходи амплітудного детектора і схеми складання підключені відповідно до першого і другого входів індикатора типа А, перший і другий входи блока випромінювачів високочастотної антенної системи і вихід індикатора типа А з'єднані відповідно з першим і другим входами і виходом сумарно-різницевого пеленгатора. Недоліком сумарно-різницевого пеленгатора прототипу є те, що збільшується похибка вимірювання кутового напрямку. Це обумовлено тим, що в процесі роботи (експлуатації) не залишаються постійними (незмінними) фазові співвідношення між напругами на керуючому (опорному) і вимірювальному входах фазочутливого детектора. На вимірювальний вхід фазочутливого детектора надходить напруга проміжної частоти U D= Um1 cos W t [або U D= Um1 cos ( Wt + 180o )] з виходу приймача різницевого каналу. На керуючий (опорний) вхід фазочутливого детектора надходить напруга проміжної частоти Uå = Um 2 cos W t , яка використовується як опорна напруга. Зсув фаз поміж напругами UD і Uå призводить до зміни величини вихідної напруги фазочутливого детектора, що відповідає величині і знаку кутового відхилення цілі від рі вноси гнал ьного напрямку. Таким чином зміна фазових співвідношень поміж напругами UD і Uå на входах фазочутливого детектора призводить до зміни (збільшення) похибки визначення кутового напрямку (пеленга), яка залежить від величини і знаку відхилення цілі від рівносигнального напрямку. Наприклад, знак "+" відповідає відхиленню цілі вправо від рівносигнального напрямку, знак "-" відповідає відхиленню цілі вліво від рівносигналь ного напрямку. Запропоноване технічне рішення спрямовано на створення моноімпульсного сумарнорізницевого пеленгатора, який забезпечує одночасне вимірювання кутових напрямків на декілька BO, які розміщенні в одній площині в межах головного пелюстка пеленгаційної антени за рахунок заміни фазових вимірювань на амплітудні вимірювання, що дозволяє зменшити величину похибки вимірювання кутового напрямку. Поставлена мета досягається завдяки тому, що в моноімпульсний сумарно-різницевий пелен 6 гатор, призначений для одночасного вимірювання кутови х напрямків на декілька випромінюючих об'єктів в одній площині в межах головного пелюстка пеленгаційної антени, до якого включені високочастотна антенна система у складі блока випромінювачів, кільцевого хвилевидного моста, дзеркала, приймач сумарного каналу у складі змішувача сумарного каналу, місцевого гетеродина, підсилювача проміжної частоти сумарного каналу, першого амплітудного детектора, приймач різницевого каналу у складі змішувача різницевого каналу, підсилювача проміжної частоти різницевого каналу, схема складання, в якому перший вихід блока випромінювачів підключений до першого входу кільцевого хвилевидного моста, перший (сумарний) і другий (різницевий) виходи якого підключені відповідно до перших входів змішувача сумарного каналу і змішувача різницевого каналу, до других входів змішувачів підключені відповідно перший і другий виходи місцевого гетеродина, вихід змішувача сумарного каналу через підсилювач проміжної частоти сумарного каналу підключений до входу першого амплітудного детектора, вихід змішувача різницевого каналу підключений до входу підсилювача проміжної частоти різницевого каналу, перший і другий входи блока випромінювачів високочастотної антенної системи з'єднані . відповідно з першим і другим входами моноімпульсного сумарно-різницевого пеленгатора, введені дільник потужності, другий амплітудний детектор, приймач парціального каналу у складі змішувача парціального каналу, підсилювача проміжної частоти парціального каналу, третього амплітудного детектора, перший, другий, третій вимірювачі амплітуди, перший і другий блоки калібровки, перший і другий блоки схем порівняння, ділильний пристрій, причому другий вихід блока випромінювачів високочастотної антенної системи підключений до входу дільника потужності, перший і другий виходи якого підключені відповідно до другого, входу кільцевого хвилевидного моста і першого входу змішувача парціального каналу, другий вхід якого підключений до другого виходу місцевого гетеродина, вихід підсилювача проміжної частоти різницевого каналу підключений до входу другого амплітудного детектора, вихід змішувача парціального каналу через підсилювач проміжної частоти парціального каналу підключений до входу третього амплітудного детектора, вихід першого амплітудного детектора через перший вимірювач амплітуди підключений до першого входу ділильного пристрою, вихід третього амплітудного детектора через третій вимірювач амплітуди підключений до другого входу ділильного пристрою, вихід якого підключений до першого входу першого блока схем порівняння, другий вхід якого підключений до виходу першого блока калібровки, вихід другого амплітудного детектора через другий вимірювач амплітуди підключений до першого входу другого блока схем порівняння, другий вхід і вихід якого підключені відповідно до першого виходу і входу другого блока калібровки, вихід (Æо) рухомої частини антенної системи, перший (знак "+") і другий (знак "-") виходи першого блока схем порівняння, другий вихід (DÆо) другого блока калібровки під 7 84609 ключені відповідно до першого (Æо), другого (знак "+"), третього (знак "-"), четвертого (DÆі) входів схеми складання, вихід якої (Æо±DÆі) підключений до виходу сумарно-різницевого пеленгатора. Зменшення величини похибки вимірювання кутови х напрямків на декілька BO досягається за рахунок заміни фазових вимірювань на амплітудні вимірювання (виключається використання фазочутливого детектора). У цьому випадку не має вимог до підтримання незмінними в процесі роботи (експлуатації) фазових співвідношень поміж вихідними сигналами приймачів сумарного і різницевих каналів. Куто вий напрямок на BO в моноімпульсних системах визначається згідно з формулою (1) Æі=Æо±DÆі де Æо - кутовий напрямок рівносигнального напрямку; DÆі - модуль кутового відхилення цілі від рівносигнального напрямку; "+", "-" - знаки відхилення цілі від рівносигнального напрямку. Наприклад, "+" - відхилення цілі вправо від рівносигнального напрямку. "-" -відхилення цілі вліво від рівносигнального напрямку. Чисельне значення кутового напрямку Æо залежить від вибраної системи відліку кутів. В системах, в яких кутовий напрямок Æі відраховується в межах головного пелюстка антени (використовуються нерухомі антенні системи), кутовий напрямок Æо дорівнює нулю (Æо=0). Куто ві напрямки 0і визначаються згідно з формулою (2) Æі=±DÆі В пеленгаторах, в яких використовуються рухомі антенні системи з кутом повороту 0£Æі£360°, кутове значення Æі визначається за рахунок використання давачів кута, які розміщуються на рухомій частині антенної системи. "Нуль" давача кута співпадає з напрямком, від якого відраховуються кутові величини. У цьому випадку кутовий напрямок на ВО визначається згідно з формулою (1) Æі=Æо±DÆі. У запропонованому моноімпульсному сумарно-різницевому пеленгаторі використовується рухома антенна система і для відліку кутів використовується формула (1). Модуль кутового відхилення DÆi цілі від рівносигнального напрямку визначається по різницевій діаграмі спрямованості (ДС) - по напрузі UD на виході приймача різницевого каналу (див. Фіг.2) Залежність модуля кутового відхилення DÆi від напруги UD на виході приймача різницевого каналу (див. Фі г.2) наведена в таблиці 1. Таблиця 1 DÆi, Æ0.5 0 1/12 Æ0.5 1/4 Æ0.5 1/3 Æ0.5 5/12 Æ0.5 UD, Umax 0 1/6 Umax 1/2 Umax 2/3 Umax 5/6 Umax 8 1/2 Æ0.5 Umax де Æ0.5 ширина ДС на рівні половинної потужності; Umax максимальне значення напруги UD на виході приймача різницевого каналу при відхілені цілі на половину ширини ДС від рівносигнального напрямку. В таблиці 1 величини кутів DÆі визначаються через ширину ДС Æ0.5 на рівні половинної потужності, величина напруги UD визначається через максимальну напругу на ви ході приймача різницевого каналу. Знак відхилення цілі від рівносигнального напрямку визначається по співвідношенню амплітуд сигналів сумарної і парціальної ДС (по співвідношенню напруг Uå і U1 на виходах приймачів сумарного і парціального каналів mi = Uå U , (див. 1 Фіг.2). На рівносигнальному напрямку, яке проходить через точку "а" (Фіг.2), де пересікаються парціальні ДС, (на Фіг.2 друга парціальна ДС показана пунктиром), співвідношення амплітуд сумарної і парціальної ДС дорівнює коефіцієнту mo = U å U (a). 1 Якщо виконується умова m i£m o, то знак відхилення кутового напрямку буде "-", (що відповідає відхиленню цілі вліво від рівносигнального напрямку, див. Фіг.2). Якщо виконується умова m і>m о, то знак відхилення кутового напрямку буде "+" (що відповідає відхиленню цілі вправо від рівносигнального напрямку, див. Фіг.2). Для визначення модуля відхилення кутового напрямку на ВО від рівносигнального напрямку введено: другий амплітудний детектор, другий вимірювач амплітуди сигнала, другий блок схем порівняння, другий блок калібровки. Для визначення знака відхилення цілі від рівносигнального напрямку введено: приймач парціального каналу у складі змішувача парціального каналу, підсилювача проміжної частоти парціального каналу, третього амплітудного детектора, перший і третій вимірювачі амплітуди, ділильний пристрій, перший блок схем порівняння, перший блок калібровки. Для забезпечення роботи сумарно-різницевого пеленгатора введено дільник потужності. Отже відомі і нові (введені) ознаки запропонованого пристрою знаходяться у причиннонаслідковому зв'язку, результатом якого є його реальна працездатність і можливість промислового застосування. Авторам і заявнику з офіційних джерел інформації не відомі технічні рішення, в яких використано сукупність відмінних ознак із відповідними зв'язками між ними, тому запропоноване технічне рішення відповідає критерію "новина". Введення до запропонованого пристрою нової сукупності ознак для виконання поставленої задачі (а саме: одночасного вимірювання кутови х напрямків з меншими похибками на декілька ВО, які розміщені в одній площині в межах головного пе 9 84609 люстка пеленгаційної антени) дозволяє стверджувати, що запропонований пристрій відповідає умовам патентоздатності, бо він є новим, має винахідницький рівень та промислове застосування. Сутність винаходу пояснюється кресленнями, де наведені: на Фіг.1- блок-схема моноімпульсного сумарно-різницевого пеленгатора; на Фіг.2 - діаграми спрямованості (ДС) антени: 1- парціальна ДС, å - сумарна ДС, D - різницева ДС. Моноімпульсний сумарно-різницевий пеленгатор складається (див. Фіг.1) з високочастотної антенної системи 1 у складі блоку випромінювачів 11; кільцевого хвилевидного моста 1-2; дзеркала 13; дільника потужності 1-4; приймача сумарного каналу 2 у складі змішувача сумарного каналу 2-1, місцевого гетеродина 2-2, підсилювача проміжної частоти сумарного каналу 2-3, першого амплітудного детектора 2-4, приймача різницевого каналу 3 у складі змішувача різницевого каналу 3-1, підсилювача проміжної частоти різницевого каналу 3-2, другого амплітудного детектора 3-3, приймача парціального каналу 4 у складі змішувача парціального каналу 4-1, підсилювача проміжної частоти парціального каналу 4-2, третього амплітудного детектора 4-3, вимірювачів амплітуди 5, 6, 7, ділильного пристрою 8, блоків схем порівняння 9, 10, блоків калібровки 11, 12, схеми складання 13. Моноімпульсний сумарно-різницевий пеленгатор має два входи 14, 15 і один вихід 16. Блок 1 (див. Фіг.1) - антена є загальновідомим типовим пристроєм радіолокаційних систем [1-3]. Антена 1 забезпечує приймання електромагнітної енергії від ВО і передачу її на вхід приймача, переміщення діаграми спрямованості (ДС) антени в площі сканування та відлік кутового напрямку. В залежності від призначення системи і частотного діапазону застосовуються антени різних типів: вібраторні, параболічні, рупорні та інші [3]. Переміщення (сканування) ДС виконується за допомогою електромеханічних чи електронних пристроїв. Антена 1 встановлюється на двох чи трьох координатних поворотних колонках. На Фіг.1 до складу антени 1 входять тільки високочастотні блоки: блок 1-1-блок випромінювачів, блок 1-2 - кільцевий хвилевидний міст, блок 1-3 - дзеркало, блок 1-4 - дільник потужності, які формують ДС антени (сумарну, різницеву і парціальну). Блоки, які забезпечують обертання (сканування) ДС антени 1, відлік кута поворота рухомої частини, координатні поворотні колонки на Фіг.1 не показані, щоб не ускладнювати Фіг.1. Ці блоки є загальновідомими типовими пристроями антен радіолокаційних систем [3] і вони не входять до відмінних ознак запропонованого пристрою (винаходу). На Фіг.1 показаний тільки вихід з рухомої частини антени 1 для відліку кута поворота рухомої .частини антени 1 у вигляді двійкового паралельного коду Æо. 10 Блок 1-1 (див. Фіг.1) - блок випромінювачів - є загальновідомим типовим пристроєм радіолокаційних антенних систем високої (дуже високої) частоти [1-3]. Блок 1-2 (див. Фіг.1) - кільцевий хвилевидний міст - є загальновідомим типовим пристроєм радіолокаційних антенних систем високої (дуже високої) частоти [1-3]. Блок 1-3 (див. Фіг.1) - дзеркало - є загальновідомим типовим пристроєм радіолокаційних антенних систем високої (дуже високої) частоти [1-3]. Блок 1-4 (див. Фіг.1) - дільник потужності - є загальновідомим типовим пристроєм радіотехнічних схем високої (дуже високої) частоти. Дільник потужності забезпечує розподіл потужності енергії високої частоти між двома або декількома каналуми у заданому співвідношенні, наприклад, у співвідношенні 1:1. Дільники потужності використовуються для живлення різних (двох або декількох) пристроїв від одного джерела високої частоти. Дільники потужності у більшості випадків являють собою високочастотні розгалужені лінії передачі або кінцеві навантажувальні опори із спеціальними відводами [4]. Блоки 2, 3, 4 (див. Фіг.1) - приймачі сумарного, різницевого і парціального каналів - є загальновідомими типовими пристроями радіолокаційних і радіонавігаційних систем [1-3]. Блоки 2-1, 3-1, 4-1 (див. Фіг.1) - змішувачі - є загальновідомі типові пристрої приймачів [5]. Блок 2-2 - гетеродин - загальновідомий типовий пристрій приймачів [5]. Блоки 2-3, 3-2, 4-2 (див. Фіг.1) - підсилювачі проміжної частоти - є загальновідомими типовими пристроями приймачів [3, 5]. Блоки 2-4, 3-3, 4-3 (див. Фіг.1) - амплітудні детектори - є загальновідомими типовими пристроями електричних і радіотехнічних схем [3, 5]. Блоки 5, 6, 7 (див. Фіг.1) - вимірювачі амплітуди - є загальновідомими типовими пристроями електровимірювальної техніки [6]. Блок 8 (див. Фіг.1) - ділильний пристрій - є загальновідомий типовий пристрій електровимірювальної і цифрової техніки [6, 7]. Блоки 9,10 (див. Фіг.1) - блоки схем порівняння - є загальновідомими типовими пристроями електровимірювальної і цифрової техніки [6, 7]. Блоки 11, 12 (див. Фіг.1) - блоки калібровки - є загальновідомими типовими пристроями електровимірювальної і цифрової техніки [6, 7]. Блок 13 (див. Фіг.1) - схема складання - є загальновідомий типовий пристрій електровимірювальної і цифрової техніки [6, 7]. У моноімпульсному сумарно-різницевому пеленгаторі перший вихід блока випромінювачів 1-1 підключений до першого входу кільцевого хвилевидного моста 1-2, другий ви хід блока випромінювачів 1-2 підключений до входу дільника потужності 1-4, перший і другий виходи якого підключені відповідно до другого входу кільцевого хвилевидного моста 1-2 і першого входу змішувача парціального каналу 4-1. Перший (сумарний) і другий (різницевий) виходи кільцевого хвилевидного моста 1-2 підключені відповідно до перших входів змішувачів прийма 11 84609 чів сумарного 2-1 і різницевого 3-1 каналів, до других входів яких підключені відповідно перший і другий виходи місцевого гетеродина 2-2, другий вихід місцевого гетеродина 2-2 підключений також до другого входу змішувача 4-1 парціального каналу. Вихід змішувача 2-1 сумарного каналу через підсилювач проміжної частоти 2-3 підключений до входу першого амплітудного детектора 2-4, вихід змішувача 3-1 через підсилювач проміжної частоти 3-2 підключений до входу др угого амплітудного детектора 3-3, вихід змішувача парціального каналу 4-1 через підсилювач проміжної частоти 4-2 підключений до входу третього амплітудного детектора 4-3. Виходи першого 2-4, другого 3-3, третього 4-3 амплітудних детекторів підключені відповідно до входів першого 5, другого 6, третього 7 вимірювачів амплітуди. Виходи першого 5 і третього 7 вимірювачів амплітуди підключені відповідно до першого і другого входів ділильного пристрою 8, вихід якого підключений до першого входу першого блока схем порівняння 9, другий від якого підключений до виходу першого блока калібровки 11. Вихід др угого вимірювача амплітуди 6 підключений до першого входу др угого блоку схем порівняння 10, другий вхід і вихід якого підключені відповідно до першого виходу і входу др угого блоку калібровки 12. Перший ("Æо"), другий ("+"), третій ("-"), че твертий ("DÆ") входи, вихід ("DƱDÆi") схеми складання 13 підключені відповідно до виходу рухомої частини антенної системи 1, першого виходу ("+"), другого виходу ("-") першого блока схем порівняння 9, виходу ("DÆi") другого блока калібровки 12, виходу 16 моноімнульсного сумарно-різницевого пеленгатора, перший і другий входи блока випромінювачів 1-1 підключені відповідно до входів 14 і 15 моноімпульсного сумарно-різницевого пеленгатора. Моноімпульсний сумарно-різницевий пеленгатор працює таким чином. Імпульсні сигнали високої частоти (ВЧ) від ВО надходять з 14 і 15 входів сумарно-різнецевого пеленгатора і опромінюють дзеркало 3-1 антенної системи 1 і надходять на перший і другий входи опромінювачів, які розміщуються поруч, блока опромінювачів 1-1 на першому і другому ви ходах блока 1-1 формуються дві парціальні діаграми спрямованості (ДС), які пересікаються. Сінфазні сигнали ВЧ з першого і другого виходів блока опромінювачів 1-1 надходять відповідно на перший і другий входи кільцевого хвилевидного моста 1-2. На першому (сумарному) і другому (різницевому) вихода х кільцевого хвилевидного моста 1-2 формуються сумарна і різницева діаграми спрямованості на високій частоті. ВЧ-сигнали з першого (сумарного) і другого (різницевого) виходів блока 1-2 надходять відповідно на перші входи змішувачів 2-1 і 3-1 приймачів сумарного і різницевого каналів 2,3. ВЧ-сигнал з другого ви ходу дільника потужності 1-4 високочастотної антенної системи 1 надходить на перший вхід змішувача парціального канапа 4-1. 12 ВЧ-сигнали Uå=Um1 cos wt, UD=Um2 cos wt, U1=Umo cos wt відповідно сумарного 2, різницевого 3 і парціального 4 каналів перетворюються в приймачах сумарного 2. різницевого 3. парціального 4 каналів відповідно в сигнали проміжної частоти Uå Ко Um cos Wt, UD=К1 Um2 cos Wt U1=K2Um2 cos Wt, де Umo, Um1, Um2 - амплітуди ВЧ сигналів на входах приймачів сумарного 2, різницевого 3, парціального 4 каналів; w - кругова частота ВЧ сигналів; W проміжна частота сумарного 2, різницевого 3 і парціального 4 каналів: Ко, К1, К2 - коефіцієнти пропорційності. Сигнали Uå, UD, U1 з виходів підсилювачів проміжної частоти 2-3, 3-2, 4-2 надходять відповідно на перший, другий, третій амплітудні детектори 2-4, 3-3, 4-3 і перетворюються у відео імпульси. Відеоімпульси Uв ,Uв ,Uв надходять відповідно å D І на перший 5, другий 6, третій 7 вимірювачі амплітуди. А Сигнали Uå ,UІА з виходів першого 5 і третього 7 вимірювачів амплітуди у вигляді двійкових паралельних полів надходять на входи ділильного пристрою 8. Вихідний сигнал ділильного пристрою 8 у вигляді двійкового паралельного коду = mi A US UIA надходить па вхід першого блоку схем порівняння 9. Сигнал з виходу др угого вимірювача амплітуди 6 UDB у ви гляді двійкового паралельного коду надходить на вхід другого набору схем порівняння 10. Знак відхилення кутового напрямку від рівносигнального напрямку визначається таким чином. A В залежності від величини mi = US UIA , яка надходить на перший вхід першого блока схем порівняння 9, на другий вхід якого надходить калібровочна величина то з виходу першого блока калібровки 11, спрацьовує перша або друга схеми порівняння блока 9. Якщо виконується умова m i
ДивитисяДодаткова інформація
Назва патенту англійськоюMono-pulse sum-difference direction finder
Автори англійськоюOstapov Anatolii Oleksandrovych, Chyhyryn Oleh Trokhymovych
Назва патенту російськоюМоноимпульсный суммарно-разностный пеленгатор
Автори російськоюОстапов Анатолий Александрович, Чигирин Олег Трофимович
МПК / Мітки
МПК: G01S 5/10
Мітки: сумарно-різницевий, моноімпульсний, пеленгатор
Код посилання
<a href="https://ua.patents.su/7-84609-monoimpulsnijj-sumarno-riznicevijj-pelengator.html" target="_blank" rel="follow" title="База патентів України">Моноімпульсний сумарно-різницевий пеленгатор</a>
Пеленгатор джерел активних завад
Номер патенту: 17265
Опубліковано: 15.09.2006
Автори: Мотиль Володимир Миколайович, Піза Дмитро Макарович
МПК: G01S 3/00
Мітки: активних, пеленгатор, джерел, завад
Формула / Реферат:
Пеленгатор джерел активних завад, що містить послідовно з'єднані спрямовану антену й основний канал прийому, послідовно з'єднані неспрямовану антену і допоміжний канал прийому, а також перший і другий порогові пристрої, з'єднані зі входами схеми порівняння, вихід якої є виходом пеленгатора, при цьому кожен з каналів містить змішувач із загальним для обох каналів гетеродином, підсилювач проміжної частоти (ППЧ), амплітудний детектор і...
Різницевий підсилювач струму
Номер патенту: 11301
Опубліковано: 15.12.2005
Автори: Решетнік Олександр Олександрович, Гарнага Володимир Анатолійович, Азаров Олексій Дмитрович, Захарченко Сергій Михайлович
МПК: H03F 3/26
Мітки: підсилювач, струму, різницевий
Формула / Реферат:
Різницевий підсилювач струму, який містить резистор зворотного зв'язку, шину нульового потенціалу, шини живлення з додатним та від'ємним потенціалами, вхідну та вихідну шини, причому до першого виводу резистора зворотного зв’язку підключено вхідну шину і емітери першого та другого транзисторів, до бази другого транзистора підключено базу і колектор третього транзистора і колектор четвертого транзистора, база четвертого транзистора під'єднана...
Різницевий генератор гармонічних коливань
Номер патенту: 14410
Опубліковано: 15.05.2006
Автори: Осадчук Олександр Володимирович, Осадчук Володимир Степанович, Семенов Андрій Олександрович
МПК: H03B 7/00
Мітки: генератор, гармонічних, різницевий, коливань
Формула / Реферат:
Різницевий генератор гармонічних коливань, який містить джерело постійної напруги, біполярний транзистор, індуктивність, першу і другу ємність, резистор, який відрізняється тим, що в нього введено двозатворний польовий транзистор, перший і другий кварцові резонатори, причому перший вивід першого кварцового резонатора з'єднаний з першим виводом першої ємності, базою біполярного транзистора і першим виводом резистора, емітер біполярного...
Фазометр

Номер патенту: 17394
Опубліковано: 15.09.2006
Автори: Рудик Вадим Данилович, Гончар Сергій Феодосійович
МПК: G01R 25/00
Мітки: фазометр
Формула / Реферат:
Фазометр, який містить перший і другий диференціатори, причому входи першого та другого диференціаторів підключені до вхідних каналів фазометра, а їх виходи з'єднані з входами другого та першого підсилювачів-обмежувачів відповідно, які виходами підключені до входів першого тригера, перший і другий детектори, які включені між виходами підсилювачів-обмежувачів і входами схеми співпадання, вихід якої через послідовно з'єднані другий тригер і...
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти
Номер патенту: 48459
Опубліковано: 15.08.2002
Автори: Соченко Петро Степанович, Зеленков Олександр Аврамович, Пазюк Олексій Вячеславович
МПК: G01R 27/02, G01R 27/00
Мітки: повного, індуктивності, частоти, потужності, реактивного, опору, ємності, активного, вимірювач
Формула / Реферат:
Вимірювач потужності, повного, активного та реактивного опору, ємності, індуктивності та частоти, який містить послідовно з'єднані навантаження, еталонний резистор та перший блок вимірювань, в який входять перший, другий та третій квадратори, суматор, перший, другий та третій перетворювачі, перший та другий блоки ділення, перший, другий, третій та четвертий блоки множення та перший реєстратор, причому перший вивід навантаження з'єднаний з...
Попередній патент: Спосіб ерліфтного підйому компонентів підводних родовищ корисних копалин та система для його реалізації
Наступний патент: Спечена деталь з порошку на основі заліза і спосіб її виробництва
Випадковий патент: Закупорювальний ковпачок для ємності з текучим середовищем