Апарат гуцуляка в.і. для корекції деформацій кісток та суглобів
Формула / Реферат
1. Апарат для корекції деформацій кісток та суглобів, що містить проксимальні і дистальні опори з встановленими на них за допомогою елементів кріплення черезкістковими фіксаторами, різьбові штанги, репозиційні вузли, який відрізняється тим, що проксимальна опора сполучається з кожним репозиційним вузлом за допомогою трьох взаємно перпендикулярно з'єднаних різьбових штанг, один кінець яких виконаний у вигляді вушок з наскрізними поперечними отворами; основу репозиційного вузла складає триланковий шарнірний механізм, одна ланка якого виконана у вигляді різьбової штанги, а дві інші - у вигляді двосторонніх напівшарнірних кронштейнів, що містять циліндричні частини, які служать як осі обертання для ще двох шарнірів, виготовлених у вигляді С-подібних планок, причому осі обертання трьох шарнірів в репозиційних вузлах перетинаються в одній точці;
різьбові штанги розташовані між репозиційними вузлами та з'єднані стяжно-розвідним механізмом, який складається з двох телескопічно з'єднаних муфт з різнонаправленими різьбами та з наскрізними поперечними отворами, в які встановлено штифт.
2. Апарат за п. 1, який відрізняється тим, що для центрації репозиційних вузлів апарата відносно вибраних умовних осей обертання дистального фрагмента (сегмента), через геометричний центр стяжно-розвідного механізму та точку перетину осей обертання шарнірів в репозиційних вузлах проходять осьові канали для направляючих спиць.
3. Апарат за п. 1, який відрізняється тим, що для візуального контролю за здійснюваними переміщеннями, в осьові канали репозиційних вузлів встановлюють осі знімних кутомірів, виконаних у вигляді двох телескопічно з'єднаних півдуг з шкалами, проградуйованими в градусах; на лисках різьбових штанг нанесено лінійні шкали, а грані гайок виконані з точками-мітками.
4. Апарат за п. 1, який відрізняється тим, що С-подібні планки репозиційних вузлів з'єднуються з вушками різьбових штанг за допомогою болтів, а стяжно-розвідний механізм виготовлений з двох муфт, що з'єднані штифтом з можливістю демонтажу репозиційних елементів.
5. Апарат за п. 1, який відрізняється тим, що для корекції деформацій п'яткової кістки, кісток таза, можливий монтаж апарата з розташуванням різьбових штанг, з'єднаних стяжно-розвідним механізмом дистальніше репозиційних вузлів.
6. Апарат за п. 1, який відрізняється тим, що для корекції сегментів з двома і більше деформованими кістками (суглобами), фіксацію дистальних відламків здійснюють в
окремих проміжних опорах, які почергово, на момент їхньої репозиції, приєднують до дистальної опори.
Текст
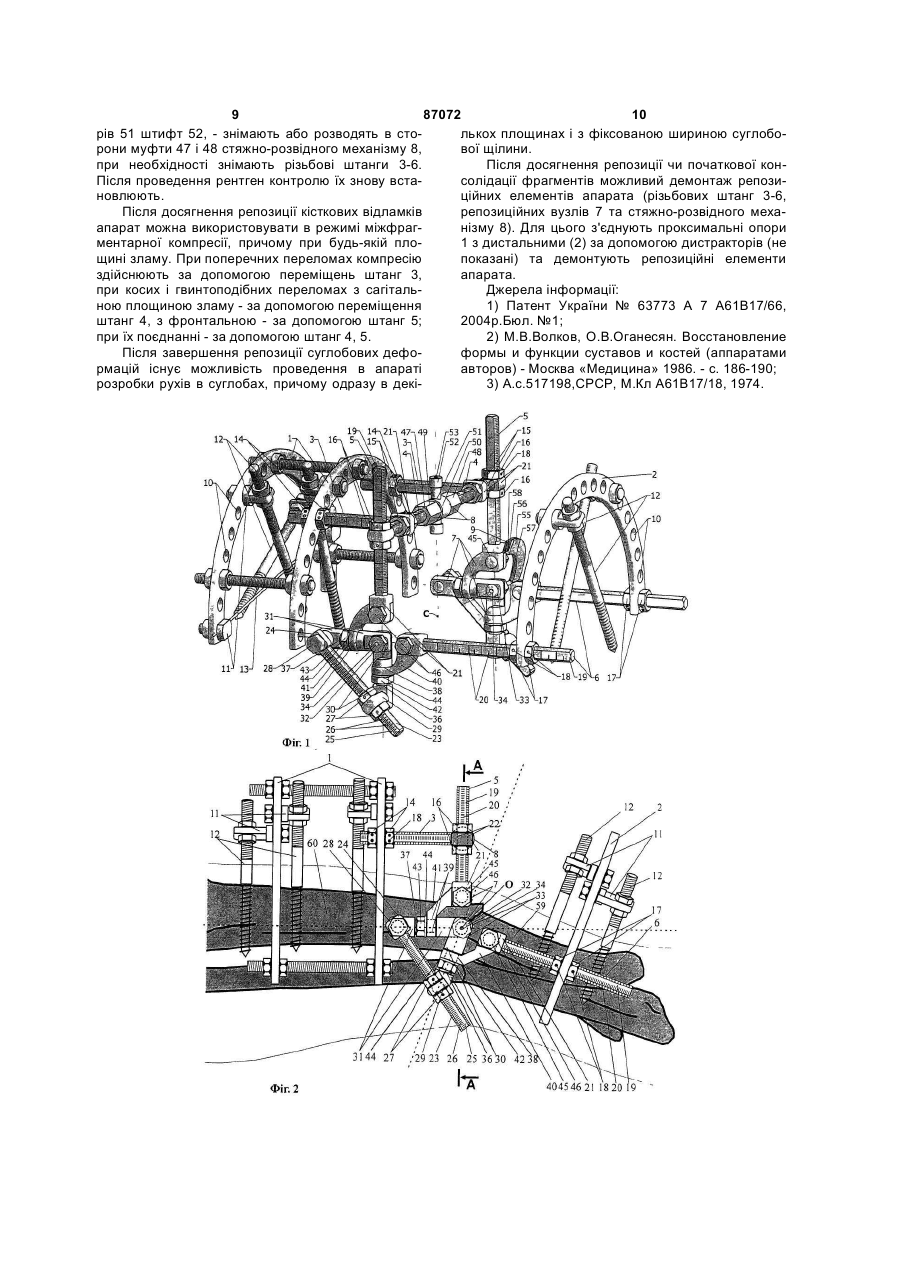
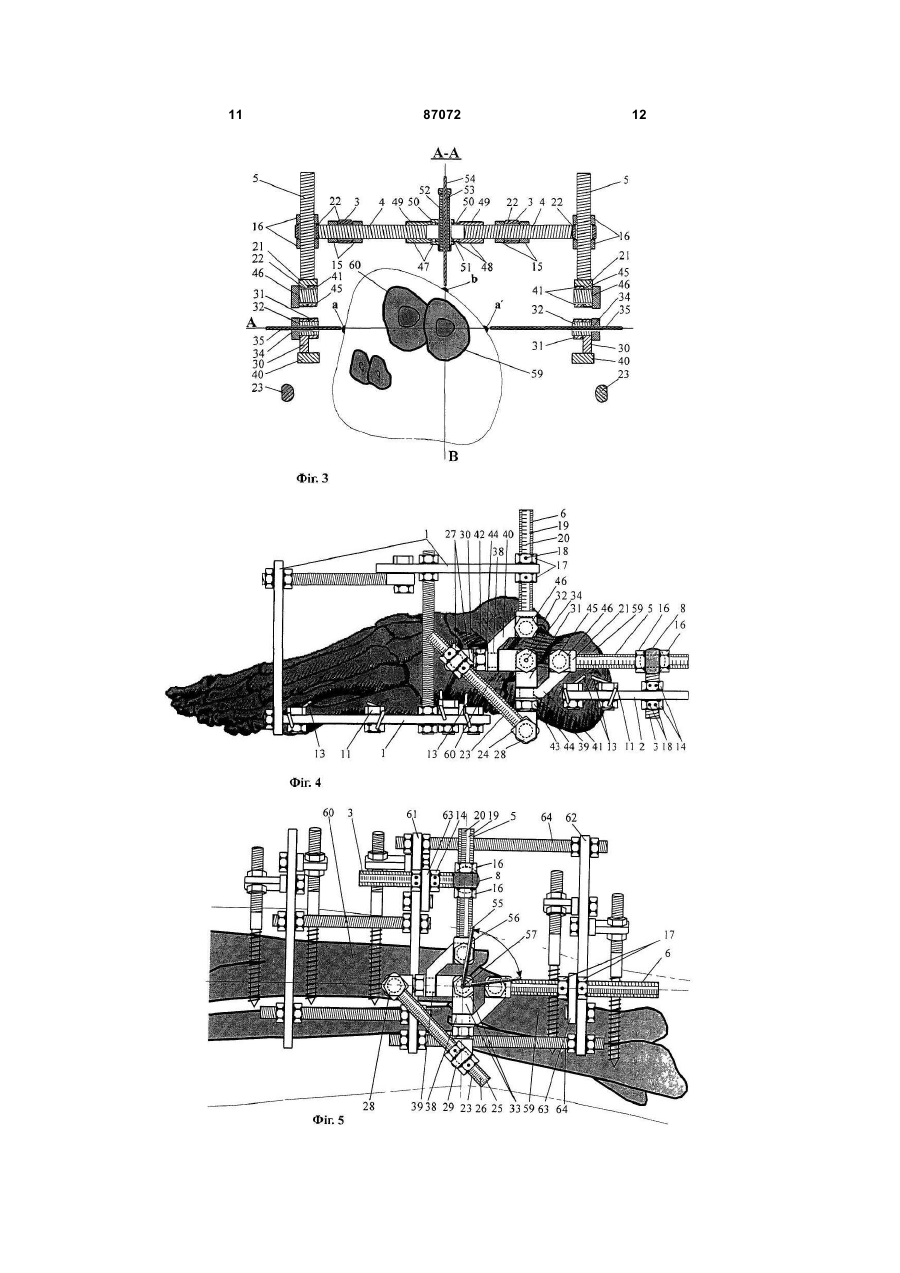
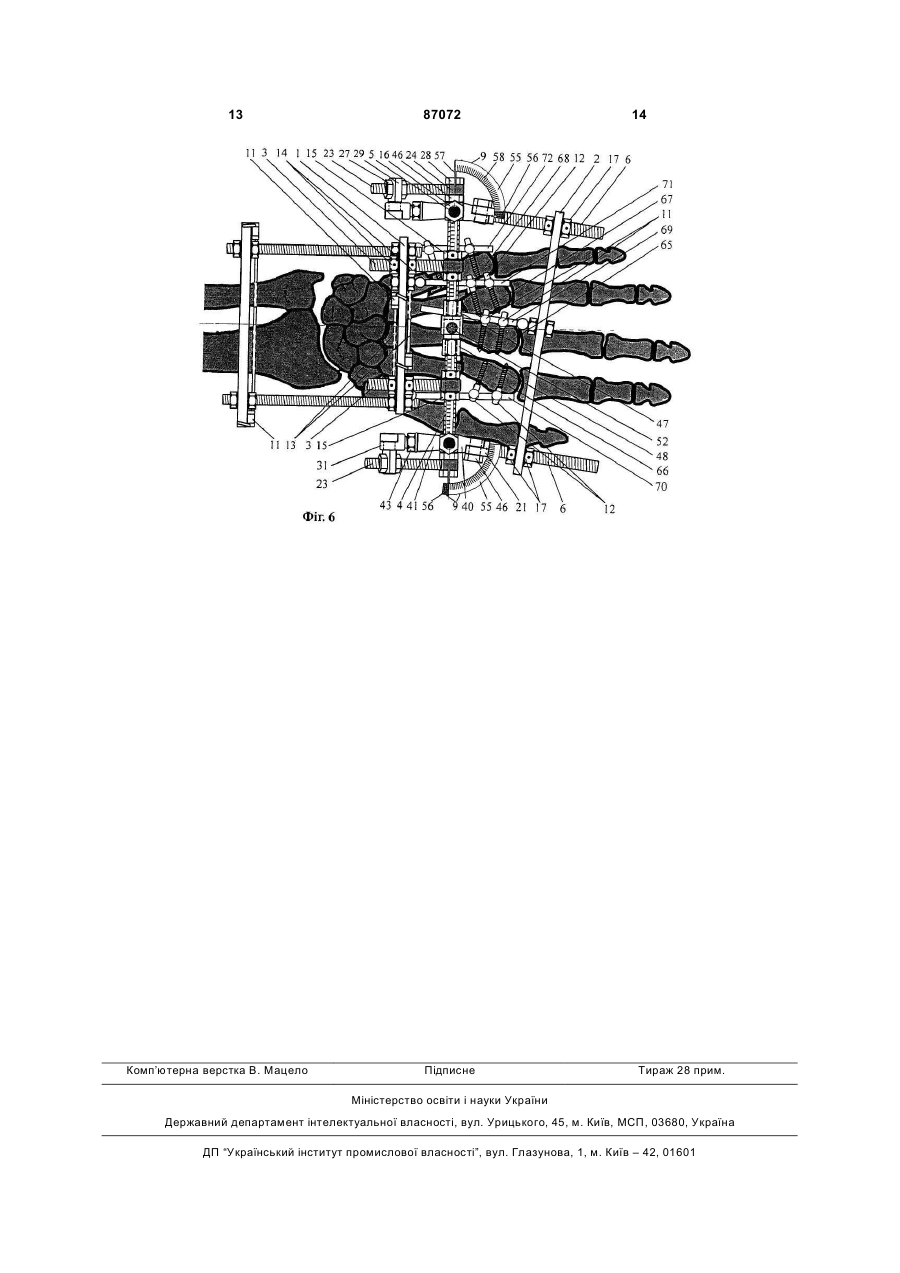
1. Апарат для корекції деформацій кісток та суглобів, що містить проксимальні і дистальні опори з встановленими на них за допомогою елементів кріплення черезкістковими фіксаторами, різьбові штанги, репозиційні вузли, який відрізняється тим, що проксимальна опора сполучається з кожним репозиційним вузлом за допомогою трьох взаємно перпендикулярно з'єднаних різьбових штанг, один кінець яких виконаний у вигляді вушок з наскрізними поперечними отворами; основу репозиційного вузла складає триланковий шарнірний механізм, одна ланка якого виконана у вигляді різьбової штанги, а дві інші - у вигляді двосторонніх напівшарнірних кронштейнів, що містять циліндричні частини, які служать як осі обертання для ще двох шарнірів, виготовлених у вигляді С-подібних планок, причому осі обертання трьох шарнірів в репозиційних вузлах перетинаються в одній точці; різьбові штанги розташовані між репозиційними вузлами та з'єднані стяжно-розвідним механізмом, який складається з двох телескопічно з'єднаних муфт з різнонаправленими різьбами та з наскріз C2 2 UA 1 3 87072 4 Недоліком цього пристрою є недостатня точторами, різьбові штанги, репозиційні вузли, згідно ність репозиції при кутових та ротаційних дефорвинаходу, одна з опор сполучається з кожним ремаціях, внаслідок розташування осей обертання позиційним вузлом за допомогою трьох взаємно шарнірів на віддалі від лінії перелому (вершини перпендикулярно розташованих різьбових штанг, деформації); апарат не призначений для корекції один кінець яких виконаний у вигляді вушок з надеформацій суглобів. скрізними поперечними отворами; основу репозиЗа прототип обрано апарат Волковаційного вузла складає трьохланковий шарнірний Оганесяна для репозиції і фіксації кісткових відламеханізм, одна ланка якого виконана у вигляді мків VIII моделі [2, 3]. Апарат складається з 4-х різьбової штанги, а дві інші - у вигляді двосторонскоб, в яких за допомогою спиць фіксують кісткові ніх напівшарнірних кронштейнів, які містять цилінвідламки. Центральні скоби з'єднані одним переддричні частини, що служать як осі обертання для нім і двома боковими шарнірними дистракторами. ще двох шарнірів, виготовлених у вигляді СОстанні містять посередині репозиційні вузли, виподібних планок, причому осі обертання трьох конані у вигляді двох, перпендикулярно з'єднаних, шарнірів в репозиційних вузлах перетинаються в направляючих циліндрів, в яких за допомогою хоодній точці; різьбові штанги для усунення попередових гвинтів пересуваються повзуни з зафіксовачних деформацій розташовані між репозиційними ними у них фіксаторами, що приводить до перемівузлами та з'єднані стяжно-розвідним механізмом, щення однієї скоби відносно іншої в сагітальній і який складається з двох телескопічно з'єднаних фронтальній площинах, і дає можливість усувати муфт з різнонаправленими різьбами та з наскріззміщення по ширині при обертанні ходових гвинтів ними поперечними отворами, в які встановлено в одному напрямі, та ротаційні зміщення - при їх штифт; через геометричний центр стяжнообертанні в протилежних напрямах. Направляючі розвідного механізму та точку перетину осей обециліндри встановлені в кожухах, з можливістю ртання шарнірів в репозиційних вузлах проходять обертання навколо своєї осі, що забезпечує кореосьові канали для направляючих спиць; в осьові кцію кутових зміщень кісткових відламків. канали репозиційних вузлів встановлено осі знімПрототип має ряд недоліків: обмежені репозиних кутомірів, виконаних у вигляді двох телескопіційні можливості апарата при великих кутових та чно з'єднаних півдуг з шкалами, проградуйованими ротаційних зміщеннях, що зумовлено обмеженим в градусах; на лисках різьбових штанг нанесено кутом повороту на шарнірах, осі обертання яких лінійні шкали, а грані гайок виконані з точкамирозташовані паралельно; недостатня точність ремітками; С-подібні планки репозиційних вузлів позиції, що зумовлено різними точками приклаз'єднані з вушками різьбових штанг за допомогою дання репозиційних зусиль апарата в різних плоболтів. щинах, внаслідок розташування осей обертання Між сукупністю суттєвих ознак винаходу і техшарнірів в репозиційних вузлах на відстані одна нічним результатом, що досягається, існує такий відносно іншої; не забезпечує можливості для точпричинно-наслідковий зв'язок. ної центрації репозиційних вузлів апарата відносНаявність стяжно-розвідного механізму, що но умовних осей обертання дистального фрагмензабезпечує зміну відстані між репозиційними вузта; великі зовнішні габарити апарата за рахунок лами, дозволяє збільшувати кут повороту шарнірів розташування елементів для усунення поперечних з паралельними осями обертання, і як наслідок, зміщень (горизонтальних направляючих циліндрів) можливість усувати кутові та ротаційні деформації в репозиційних вузлах; апарат не забезпечує можбудь-якої величини, і уникнути при цьому дефорливості для візуального та рентгенологічного контмування самого апарата. Конструктивне рішення ролю за здійснюваними переміщеннями; апарат не репозиційних вузлів, а саме, завдяки тому, що осі призначений для корекції деформацій кісткових обертання всіх шарнірів в репозиційних вузлах відламків, що вже синтезовані в апаратах зовнішперетинаються в одній точці, дозволяє прикладати ньої фіксації, без їхнього демонтажу. всі репозиційні зусилля апарата в одній точці (знаВ основу винаходу поставлено завдання ствоходиться на середині відстані між двома репозирити апарат, конструкція якого дозволяє усувати ційними вузлами, точка С фіг.1), що значно підвикісткові і суглобові деформації будь-якої величини, щує точність репозиції. Виконання осьових каналів з високою точністю репозиції відламків, завдяки в осях репозиційних вузлів та штифті стяжноприкладанню всіх репозиційних зусиль апарата в розвідного механізму, в які встановлюються наодній точці; забезпечити можливість точної правляючі спиці, дозволяє точно центрувати репоцентрації репозиційних вузлів апарата відносно зиційні вузли апарата відносно обраних умовних умовних осей обертання дистального фрагмента осей обертання дистального фрагмента (сегмен(сегмента); мінімізувати зовнішні габарити апарата), - а це відповідно збільшує точність репозиції. та; забезпечити можливість для візуального та Розміщення різьбових штанг для усунення поперентгенологічного контролю за здійснюваними речних деформацій між репозиційними вузлами переміщеннями на всіх етапах корекції; забезпедозволяє зменшити зовнішні габарити апарата. чити можливість використання апарата для усуВиконання різьбових штанг з лисками, на яких нанення деформацій кісток та суглобів, що вже синнесені лінійні міліметрові шкали, та гайок з точкатезовані в апаратах зовнішньої фіксації. ми-мітками на гранях забезпечує можливість для Поставлене завдання досягається тим, що в візуального контролю за лінійними переміщенняапараті для корекції деформацій кісток і суглобів, ми, а використання знімних кутомірів - контроль за що містить проксимальні і дистальні опори з встакутовими та ротаційними переміщеннями. З'єдновленими на них за допомогою елементів кріпнання С-подібних планок репозиційних вузлів з лення стержневими і спицевими кістковими фіксавушками різьбових штанг за допомогою болтів та 5 87072 6 виконання стяжно-розвідного механізму з двох виконані з різьбовими отворами 45 (фіг.2, 3) під муфт, що з'єднані за допомогою штифта забезпеболти 46, з допомогою яких репозиційні вузли 7 чує: можливість швидкого демонтажу репозиційних жорстко з'єднуються з вушками 21 різьбових штанг елементів під час проведення рентген контролю 5, 6. на будь-якому етапі корекції, демонтування після Різьбові штанги 4, що служать для поперечних досягнення репозиції відламків репозиційних елепереміщень, виконано з різнонаправленими різьментів та їх використання для усунення деформабами і сполучено між собою за допомогою стяжноцій кісток чи суглобів, що вже синтезовані в апарарозвідного механізму 8 (фіг.1, 3). тах зовнішньої фіксації. Стяжно-розвідний механізм 8 складається з Винахід проілюстрований графічним матеріадвох телескопічно з'єднаних муфт 47, 48, одна з лом, де на фіг.1 зображений загальний вид апараяких (47) виконана з правосторонньою, інша (48) та в аксонометрії; на фіг.2 - схема монтажу апараз лівосторонньою внутрішньою різьбою, що взаєта для корекції деформацій трубчастих кісток; на модіють з відповідними різьбовими штангами 4. З фіг.3 - переріз А-А на фіг.2; на фіг.4 - схема монодного боку муфти виконані у вигляді шестигрантажу апарата для остеосинтезу п'яткової кістки; на ників 49 з можливістю їх обертання за допомогою фіг.5 - схема монтажу апарата для репозиції кістключа, з іншого - у вигляді циліндрів 50 з наскрізкових відламків, що синтезовані в апараті зовнішними поперечними отворами 51, в які встановлюньої фіксації; на фіг.6 - схема монтажу апарата ється штифт 52, що служить для з'єднання муфт для корекції деформацій кисті. 47, 48 між собою. Штифт 52 виготовлений з осьоАпарат включає (фіг.1) проксимальні 1 і дисвим каналом 53 для направляючої спиці 54 (фіг.3). тальні 2 опори, різьбові штанги 3-6, репозиційні Кутомір 9 (фіг. 1, 5, 6) виконаний у вигляді вузли 7, стяжно-розвідний механізм 8, знімні кутодвох телескопічно з'єднаних півдуг 55, 56, одна з міри 9. яких (55) фіксована на осі 57, за допомогою якої Опори 1, 2 виготовлені з отворами 10, в яких кутомір встановлюється в осьові канали 34 репоза допомогою елементів кріплення 11 (кронштейзиційних вузлів 7. На півдугах нанесені шкали 58, нів, болтів з отвором під головкою і ін.) можлива проградуйовані в градусах. фіксація стержневих 12 і спицевих 13 кісткових Апарат встановлюють наступним чином (фіг.2, фіксаторів. Проксимальні опори 1 сполучаються з 3). репозиційними вузлами 7 за допомогою трьох взаПроводять рентгенографію деформованого ємно перпендикулярно з'єднаних різьбових штанг сегмента (суглоба) в двох проекціях з координат3-5, що забезпечують можливість переміщення ною сіткою. Визначають оптимальні осі обертання репозиційних вузлів в трьох площинах. Репозицій(А,В) дистального фрагмента (сегмента) 59 відноні вузли 7 з'єднуються з дистальними опорами 2 сно проксимального 60 в сагітальній і фронтальній різьбовими штангами 6. площинах, та позначають їх барвником на шкірі Різьбові штанги 3-6, з встановленими на них деформованого сегмента у вигляді точок а, а', b гайками 14-17 (з точками мітками 18 на гранях), (фіг.3). виготовлені з поздовжніми лисками 19, на яких Після знеболення та обробки операційного нанесені лінійні міліметрові шкали 20, а один кіполя проксимальний фрагмент (сегмент) 60 фікнець штанг виконаний у вигляді вушок 21 з насують з допомогою стержневих 12 або (і) спицевих скрізними поперечними отворами 22 (фіг.2, 3), за 13 фіксаторів в опорах 1, які розташовують перпедопомогою яких штанги 3 і 4 сполучаються відпондикулярно до поздовжньої осі кістки. До опор 1 відно з штангами 4 і 5, а штанги 5, 6 з С-подібними приєднують за допомогою різьбових штанг репопланками репозиційних вузлів 7. З метою виклюзиційні вузли 7 з стяжно-розвідним механізмом 8, чення ротації отвори 22 різьбових штанг 3 і 4, чеякий встановлюють проксимальніше (фіг.1-3) або рез які проходять штанги 4, 5 виконано з лисками. дистальніше репозиційних вузлів 7 (фіг.4). Основу репозиційного вузла 7 (фіг.1, 2) склаРепозиційні вузли 7 встановлюють таким чидає трьохланковий шарнірний механізм. Одна ном (фіг.3), щоб одна вісь обертання (А) дистальланка останнього виконана у вигляді різьбової ного фрагмента (сегмента) 59, наприклад в сагіташтанги 23 з вушком 24 та лискою 25, на якій нанельній площині, співпадала з осями 32 шарнірів 33, сена шкала 26 проградуйована в градусах. За доа друга (В), наприклад в фронтальній площині, - з помогою осі 28 (у вигляді болта) та осі 29 (у вигляштифтом 52 стяжно-розвідного механізму 8, який ді поворотної головки) штанга 23 сполучається з встановлюють строго на середині відстані між редвома іншими ланками, виконаними у вигляді напозиційними вузлами 7. Для центрації репозиційпівшарнірних двосторонніх кронштейнів 30, 31, які них вузлів 7 відносно осей обертання А і В в осьові в свою чергу, сполучені між собою за допомогою канали 34 та 53 відповідно осей 32 та штифта 52 осі (болта) 32 (шарнір 33). Вісь 32 виготовлена з проводять направляючі спиці 35, 54 та співставосьовим каналом 34 для направляючої спиці 35 ляють їх з відповідними позначками на шкірі (точ(фіг.3). Кронштейни 30, 31 посередині містять циками а, а', b), переміщуючи різьбові штанги 3, 4 та ліндричні частини 36, 37, що служать як осі обер5 відповідно по довжині, горизонталі та вертикалі. тання для шарнірів 38, 39, виконаних в вигляді СРепозиційні вузли 7 з'єднують (фіг.2) за допоподібних планок 40, 41. Шарніри 38, 39 фіксуються могою різьбових штанг 6 та гайок 17 з дистальнив необхідному положенні відповідно за допомогою ми опорами 2, в яких фіксують стержневими 12 гайок 42, 43 з шайбами 44. Осі обертання (познаабо (і) спицевими 13 фіксаторами дистальний чені пунктирними лініями, фіг.1,2) всіх трьох шарфрагмент (сегмент) 59. нірів (33, 38, 39) в репозиційних вузлах перетинаПри монтуванні апарата для усунення дефорються в точці О (фіг.2). С-подібні планки 40, 41 мацій кісток чи суглобів, що вже синтезовані в 7 87072 8 апараті зовнішньої фіксації (фіг.5), можливе виковзаємодіють з відповідними різьбовими штангами ристання тільки репозиційних елементів, які з'єд4. При цьому змінюється відстань між штангами 4, нують різьбовими штангами 3, 6 з опорами 61, 62 і як наслідок, - і між репозиційними вузлами 7. Відданого апарата. При відсутності вільних отворів в стань між репозиційними вузлами 7 необхідно опорах 61, 62 використовують планки 63. У випадзменшувати при корекції ротаційних деформацій,і ках, коли опори апарата розміщені не перпендикузбільшувати - при корекції кутових деформацій в лярно до поздовжньої осі кістки, різьбові штанги 3, фронтальній площині. 6 з'єднують з опорами 61, 62 за допомогою універМонтування апарата на сегментах з двома і сальних зажимів (не показано). Проводять демонбільше деформованими кістками або (і) суглобами таж штанг 64, що з'єднують проксимальні опори (передпліччя, кисть, стопа) дещо відрізняється апарата з дистальними. (фіг.6). Репозицію проводять наступним чином (при Проксимальні фрагменти фіксують за допоморозташуванні стяжно-розвідного механізму 8 прокгою стержневих 12 або (і) спицевих 13 фіксаторів в симальніше репозиційних вузлів 7, фіг.1-3): спільній чи окремих (при остеосинтезі кісток пе- зміщення по довжині усувають шляхом передпліччя) проксимальних опорах 1. Кожний з дисреміщення в одному напрямі різьбових штанг 3 тальних фрагментів (65-68), що потребують реповідносно проксимальної опори 1 при допомозі газиції, фіксують за допомогою стержневих 12 йок 14, або переміщенням дистальних опор 2 по (спицевих) кісткових фіксаторів в окремих проміжштангах 6 за допомогою гайок 17; них опорах (69-72). До опори 1 приєднують репо- поперечні зміщення в фронтальній площині зиційні елементи (різьбові штанги 3-6, репозиційні (медіальні чи латеральні) коригують шляхом певузли 7, стяжно-розвідний механізм 8), що з'єднані реміщення різьбових штанг 4 в одному напрямі з дистальною опорою 2, та центрують репозиційні (медіально чи латерально) за допомогою гайок 15; вузли 7 за допомогою направляючих спиць 35,54 - поперечні зміщення в сагітальній площині відносно осей обертання одного з дистальних (передні чи задні) - за допомогою гайок 16 перефрагментів (65). Проміжну опору 69 даного відламіщують різьбові штанги 5 в одному напрямі; мка сполучають з дистальною опорою 2, всі інші - кутові деформації в сагітальній площині корипроміжні опори (70-72) з'єднують з проксимальною гують наступним чином - відгвинчують болти 28, опорою 1. За допомогою репозиційних елементів 32, забезпечуючи можливість вільного повороту в апарата проводять репозицію даного фрагмента шарнірах 33, за допомогою гайок 27 переміщають (65), після чого сполучають «його» проміжну опору в ту чи іншу сторону різьбові штанги 23, при цьому (69) з проксимальною, і від'єднують від дистальної. їхня довжина між осями 28 і 29 змінюється, що Центрують репозиційні вузли 7 відносно осей обевикликає поворот кронштейнів 30, сполучених Сртання наступного дистального фрагмента (66), подібними планками 40 з штангами 6, навколо приєднують проміжну опору 70 до опори 2 та віосей 32, болти 28, 32 затягують; д'єднують від опори 1, здійснюють репозицію, і - кутові деформації в фронтальній площині т.д... Після завершення репозиції всіх відламків (вальгусні чи варусні) коригують наступним чином репозиційні елементи апарата демонтують. - відгвинчують гайки 42, забезпечуючи можливість Лінійні та кутові переміщення (в сагітальній вільного повороту в шарнірах 38, за допомогою площині) оцінюють по шкалах, які нанесені на лисгайок 17 дистальні опори 2 переміщають на однаках різьбових штанг 3-6 та 23 (фіг.2, 4). Для визнакову віддаль по штангах 6 в протилежних напрячення ротаційних, і кутових переміщень в фронтамах, при цьому відбувається поворот С-подібних льній площині застосовують знімні кутоміри 9 планок 40, сполучених з штангами 6, навколо осей (фіг.6), що складаються з двох телескопічно з'єд36; гайки 42 затягують; наних півдуг 55, 56, одну з яких (55) за допомогою - ротаційні деформації коригують наступним осі 57 встановлюють в осьові канали 34 репозичином -відгвинчують гайки 43, забезпечуючи можційних вузлів 7, а другу (56) фіксують на різьбових ливість вільного повороту в шарнірах 39, за допоштангах 5 (6). За рахунок повороту кутомірів 9 намогою гайок 16 різьбові штанги 5 переміщають на вколо осей 57 в осьових каналах 34 (вказано стріоднакову віддаль в протилежних напрямах, що лкою, фіг.5) та наявності радіальних шкал 58 на викликає поворот осей 37 в отворах С-подібних обох півдугах забезпечується можливість визнапланок 41; гайки 43 затягують; чення як ротаційних, так і кутових переміщень (в - для збільшення кута повороту на шарнірах, фронтальній площині) без перестановки кутомірів. осі обертання яких розташовані паралельно (шарЗ метою збільшення жорсткості фіксації відніри 38, 39), та попередження деформацій апарата ламків в апараті передбачена можливість викоривнаслідок сил розтягу (стиску), що виникають між стання додаткового шарнірного дистрактора, що репозиційними вузлами 7 при переміщенні в проз'єднує проксимальні опори апарата з дистальнитилежних напрямах різьбових штанг 5 відносно ми (не показаний), та стяжки, що сполучає різьбові штанг 4 (при корекції ротаційних деформацій), та штанги 23 між собою (не показана). Апарат вигопереміщенні опор 2 відносно штанг 6 (при корекції товляється декількох типорозмірів для фіксації кутових деформацій в фронтальній площині), крім сегментів різного діаметра. вище вказаних переміщень, одночасно необхідно Для проведення рентген контролю в прямій і змінювати відстань між репозиційними вузлами 7, боковій проекціях (на будь-якому етапі корекції), за що досягається за рахунок стяжно-розвідного медопомогою штанг з універсальними зажимами (не ханізму 8. Відгвинчують гайки 15, обертають в ту, показані) жорстко з'єднують проксимальні опори 1 чи іншу сторону, з'єднані з допомогою штифта 52 з дистальними 2, відгвинчують болти 46 муфти 47, 48 з різнонаправленими різьбами, що демонтують репозиційні вузли 7, виймають з отво 9 87072 10 рів 51 штифт 52, - знімають або розводять в столькох площинах і з фіксованою шириною суглоборони муфти 47 і 48 стяжно-розвідного механізму 8, вої щілини. при необхідності знімають різьбові штанги 3-6. Після досягнення репозиції чи початкової конПісля проведення рентген контролю їх знову встасолідації фрагментів можливий демонтаж репозиновлюють. ційних елементів апарата (різьбових штанг 3-6, Після досягнення репозиції кісткових відламків репозиційних вузлів 7 та стяжно-розвідного мехаапарат можна використовувати в режимі міжфрагнізму 8). Для цього з'єднують проксимальні опори ментарної компресії, причому при будь-якій пло1 з дистальними (2) за допомогою дистракторів (не щині зламу. При поперечних переломах компресію показані) та демонтують репозиційні елементи здійснюють за допомогою переміщень штанг 3, апарата. при косих і гвинтоподібних переломах з сагітальДжерела інформації: ною площиною зламу - за допомогою переміщення 1) Патент України № 63773 А 7 А61В17/66, штанг 4, з фронтальною - за допомогою штанг 5; 2004р.Бюл. №1; при їх поєднанні - за допомогою штанг 4, 5. 2) М.В.Волков, О.В.Оганесян. Восстановление Після завершення репозиції суглобових дефоформы и функции суставов и костей (аппаратами рмацій існує можливість проведення в апараті авторов) - Москва «Медицина» 1986. - с. 186-190; розробки рухів в суглобах, причому одразу в декі3) А.с.517198,СРСР, М.Кл А61В17/18, 1974. 11 87072 12 13 Комп’ютерна верстка В. Мацело 87072 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюGutsuliak's device for correction of bone and joint deformations
Автори англійськоюGutsuliak Vitalii Ivanovych
Назва патенту російськоюАппарат гуцуляка для коррекции деформаций костей и суставов
Автори російськоюГуцуляк Виталий Иванович
МПК / Мітки
МПК: A61B 17/60, A61B 17/56, A61B 17/66
Мітки: кісток, корекції, гуцуляка, в.і, апарат, суглобів, деформацій
Код посилання
<a href="https://ua.patents.su/7-87072-aparat-guculyaka-vi-dlya-korekci-deformacijj-kistok-ta-suglobiv.html" target="_blank" rel="follow" title="База патентів України">Апарат гуцуляка в.і. для корекції деформацій кісток та суглобів</a>
Апарат кавчука для зовнішньої репозиції і фіксації кісткових відламків і спосіб автоматичної і напівавтоматичної репозиції і фіксації кісткових відламків за допомогою цього апарата
Номер патенту: 73295
Опубліковано: 15.07.2005
Автор: Кавчук Анатолій Іванович
МПК: A61B 17/94
Мітки: допомогою, зовнішньої, відламків, напівавтоматичної, апарата, фіксації, автоматичної, кавчука, спосіб, апарат, цього, репозиції, кісткових
Формула / Реферат:
1. Апарат для зовнішньої репозиції і фіксації кісткових відламків, який складається із репонуючих і фіксуючих опор, повзунів, кульових шарнірів, дистракційних і фіксаційних різьбових стержнів, прямих і вигнутих зубчатих рейок, який відрізняється тим, що має додаткові різьбові репозиційні штанги, зубчаті рейки, виконані з наскрізними отворами по всій довжині з можливістю кріплення у них фіксаційних різьбових стержнів, які утворюють квадратні...
Апарат одинського зовнішньої фіксації для лікування перелому кісток таза

Номер патенту: 58104
Опубліковано: 15.07.2003
Автори: Лук'янченко Володимир Вікторович, Корж Микола Олексійович, Одинський Богдан Феліксович
МПК: A61B 17/60
Мітки: зовнішньої, одинського, лікування, фіксації, кісток, апарат, таза, перелому
Формула / Реферат:
1. Апарат зовнішньої фіксації для лікування перелому кісток таза, що містить порожнисту штангу, яка складається з двох, телескопічно вставлених одна в одну за допомогою ходового гвинта частин, на кожній з яких розташований вузол фіксації нарізних стрижнів, що взаємодіють з кістками таза, а один з зазначених вузлів виконаний підпружиненим в осьовому напрямку, який відрізняється тим, що він має принаймні одну додаткову штангу, що встановлена...
Апарат зовнішньої репозиції і фіксації кісткових відламків
Номер патенту: 35203
Опубліковано: 15.03.2001
Автор: Кавчук Анатолій Іванович
МПК: A61B 17/64, A61B 17/66
Мітки: зовнішньої, апарат, репозиції, відламків, фіксації, кісткових
Формула / Реферат:
1. Апарат зовнішньої репозиції і фіксації кісткових відламків, складається з елементів, до яких кріпляться черезкісткові стержні і механізму репозиційних рухів, відрізняється тим, що механізм репозиційних рухів складається із різьбових кутовидних опор з отворами на кутах, на яких з допомогою гайок кріпляться різьбові штанги, на кутовидних різьбових опорах знаходяться повзуни з гайками, до планок повзунів гайками фіксуються V-подібно...
Апарат сушко-амро для лікування акушерських травм з’єднань кісток таза
Номер патенту: 60540
Опубліковано: 15.10.2003
Автори: Сушко Геннадій Степанович, Амро Ірина Геннадіївна
МПК: A61B 17/66, A61B 17/42
Мітки: кісток, з'єднань, таза, апарат, травм, лікування, сушко-амро, акушерських
Формула / Реферат:
1. Апарат для лікування акушерських травм з’єднань таза, який складається з зовнішньої конструкції із спиць для черезкісткового проведення, який відрізняється тим, що зовнішня опора апарата виконана з окремих прямолінійних балок, з’єднаних між собою у вигляді замкнутої рами, наприклад у вигляді квадрата.2. Апарат по п. 1, який відрізняється тим, що як мінімум одна з балок має рухомо укріплені повзуни з різьбовими шпильками з можливістю...
Спосіб лікування несправжніх суглобів довгих трубчастих кісток
Номер патенту: 4520
Опубліковано: 17.01.2005
Автори: Хвисюк Микола Іванович, Микулинський Юрій Юхимович, Щегельська Олена Анатоліївна, Хвісюк Олексій Миколайович
МПК: A61P 19/00, A61P 41/00, A61B 17/56, A61K 35/28
Мітки: суглобів, трубчастих, довгих, спосіб, кісток, несправжніх, лікування
Формула / Реферат:
Спосіб лікування несправжніх суглобів довгих трубчастих кісток шляхом проведення компресійно-дистракційного остеосинтезу та введення аутотрансплантата у зону несправжнього суглоба, який відрізняється тим, що у пацієнта виконують забір кісткового трансплантата з крила клубової кістки, отримують первинну культуру клітин строми кісткового мозку, після нарощення необхідної кількості клітин строми кісткового мозку, що індуковані в остеоцити ,...
Попередній патент: Спосіб одержання ліпофільного екстракту з листя горіха волоського
Наступний патент: Цифровий інтегратор
Випадковий патент: Тензометричний пристрій