Пристрій для пересування стрибками

Формула / Реферат
Пристрій для пересування стрибками, що містить три важелі, які є аналогами трьох біоланок ноги спортсмена - стопи, гомілки та стегна, причому важелі з'єднані між собою шарнірами, які розташовані поряд з відповідними суглобами ніг, при цьому важелі за допомогою пружин притиснуті до упорів, який відрізняється тим, що важіль стопи шарнірно з'єднаний з важелем стегна четвертою ланкою, утворений шарнірний чотириланковик виконаний у площині симетрії пристрою, а на важелі стегна виконано сидіння, причому на важелях гомілки та стопи з обох боків виконані консольні упори.
Текст
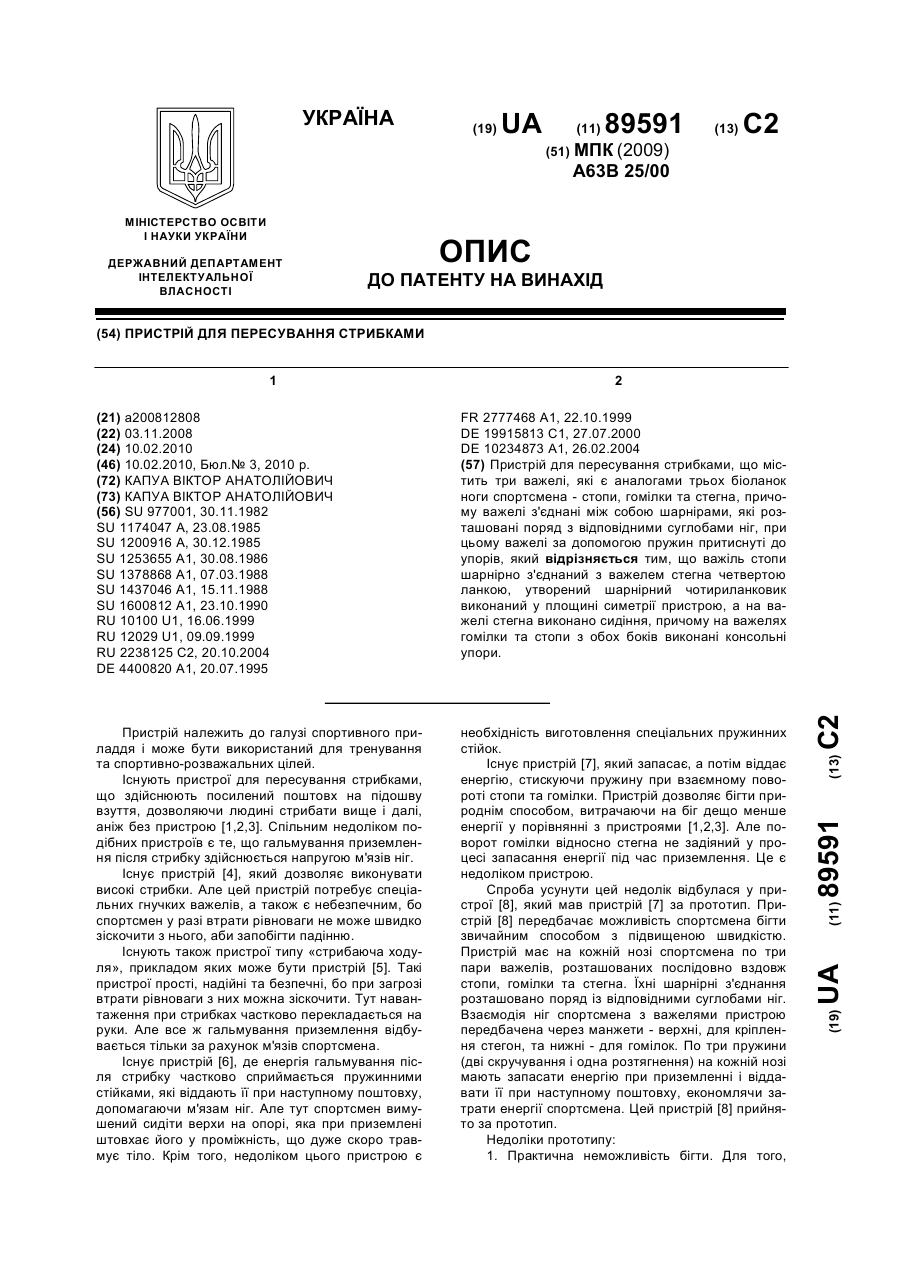
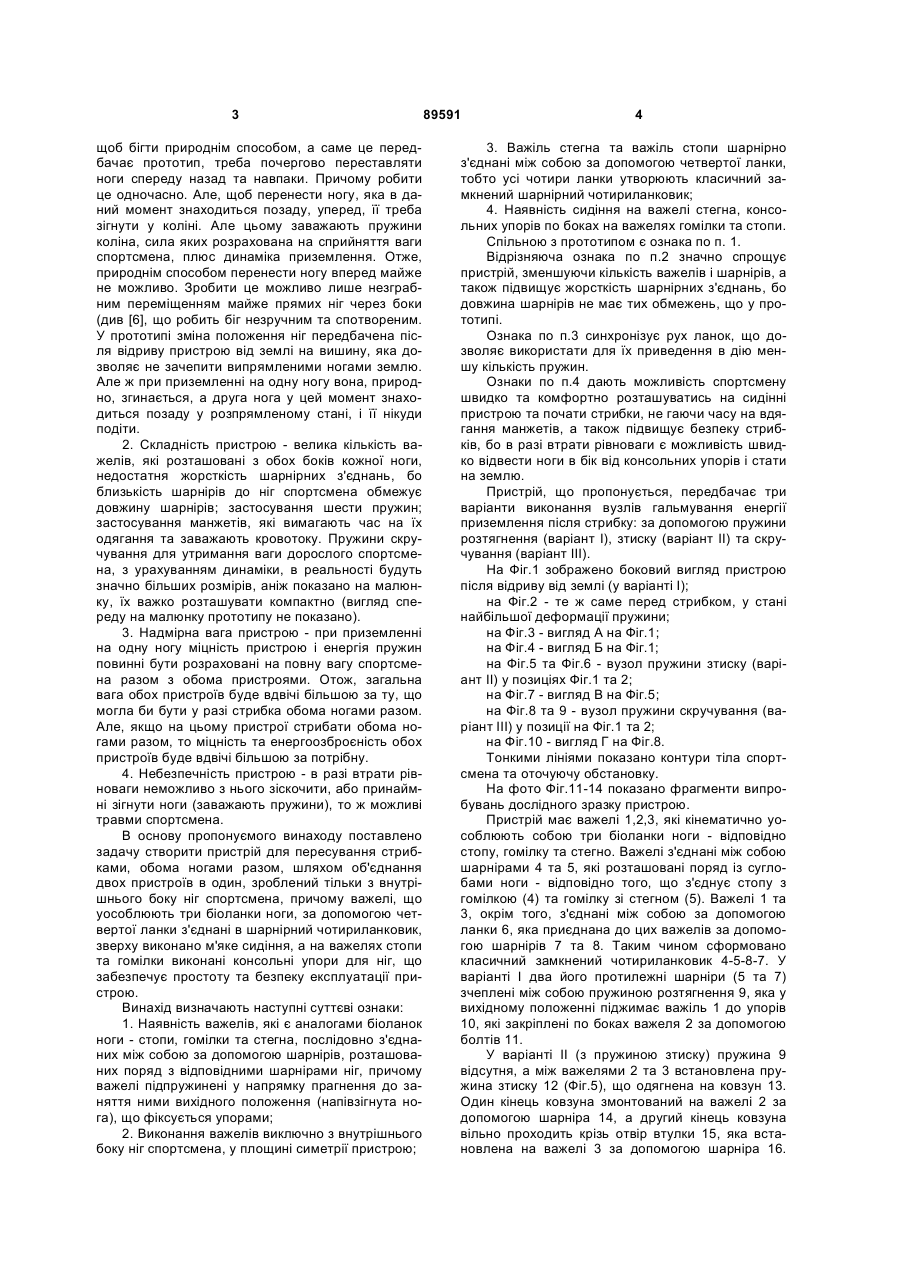
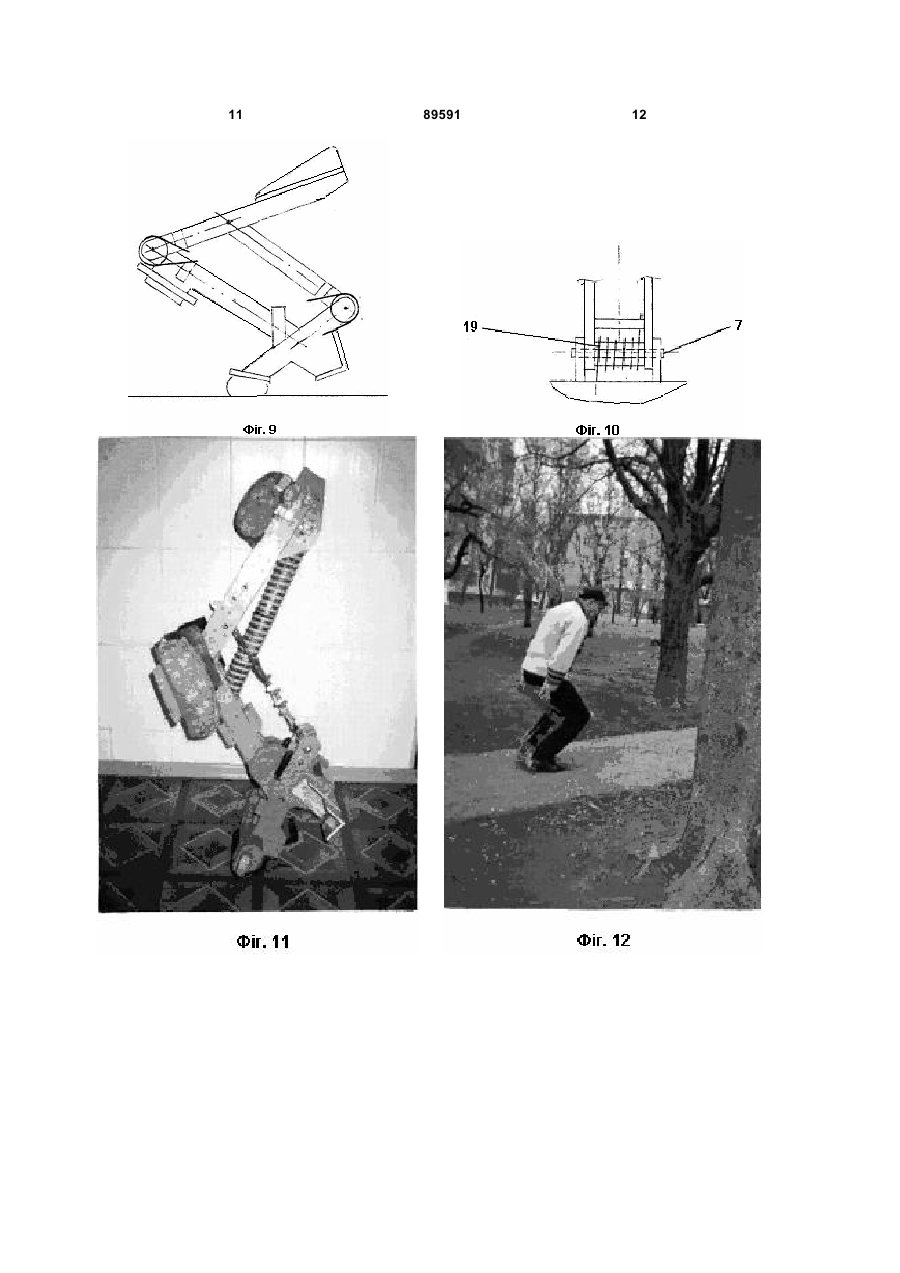
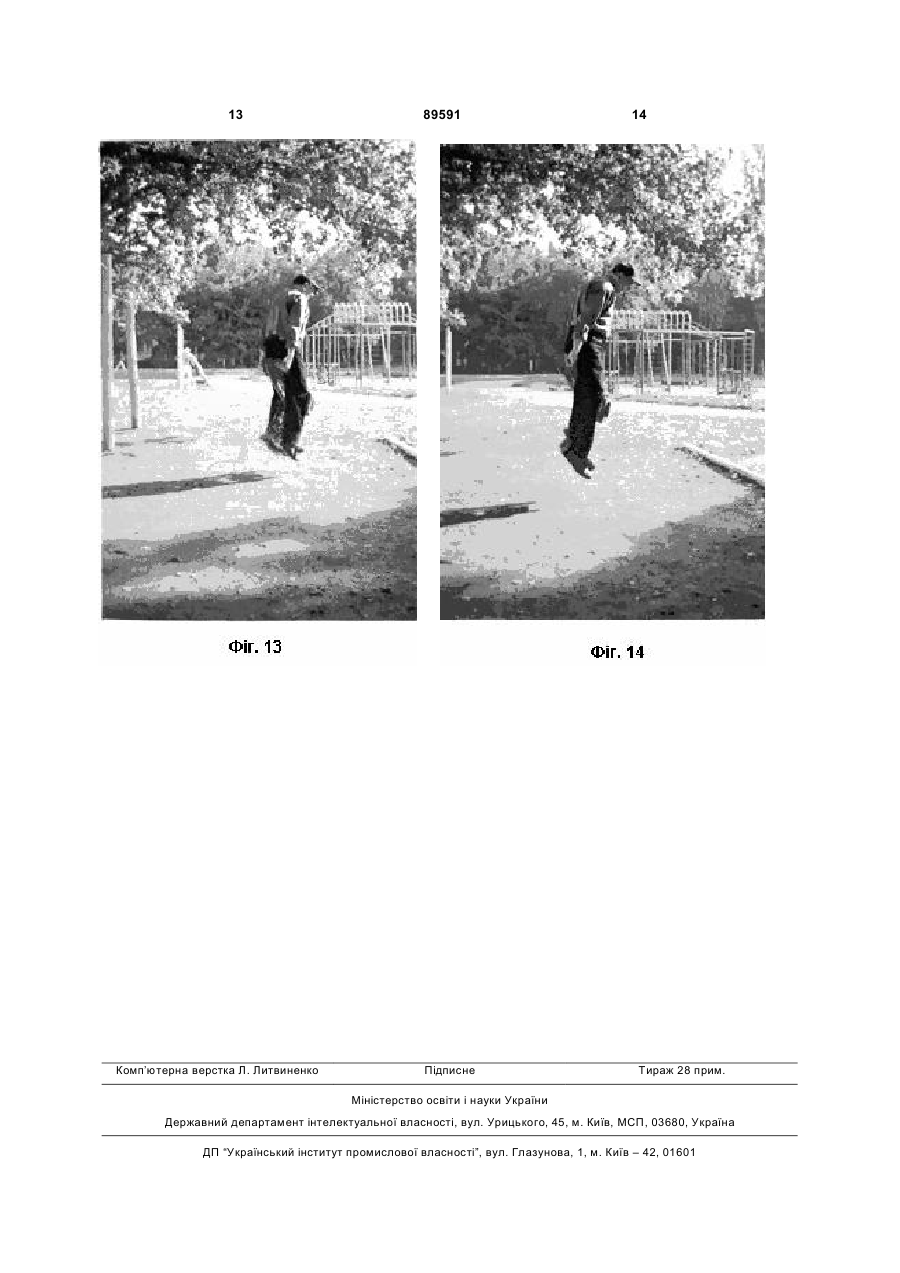
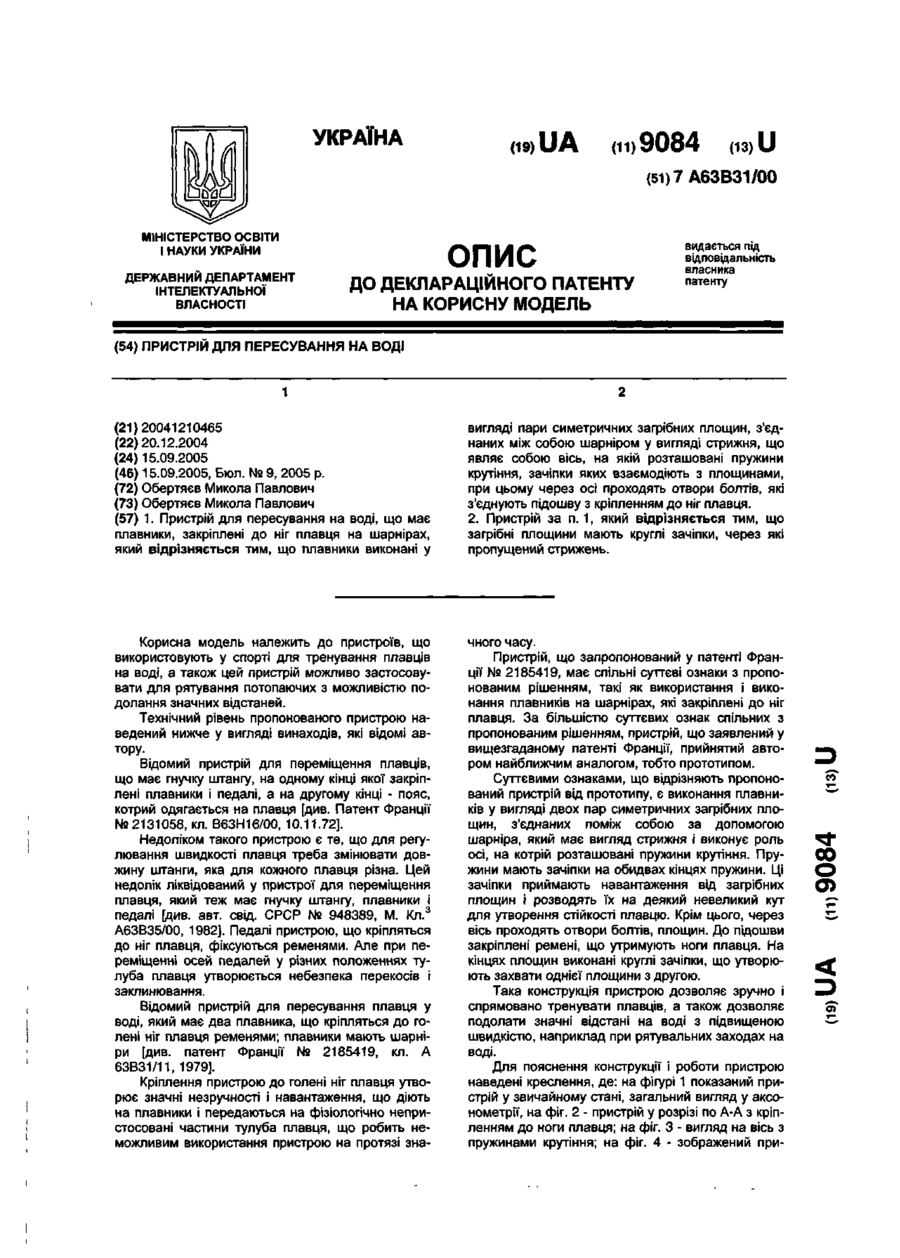
Пристрій для пересування стрибками, що містить три важелі, які є аналогами трьох біоланок ноги спортсмена - стопи, гомілки та стегна, причому важелі з'єднані між собою шарнірами, які розташовані поряд з відповідними суглобами ніг, при цьому важелі за допомогою пружин притиснуті до упорів, який відрізняється тим, що важіль стопи шарнірно з'єднаний з важелем стегна четвертою ланкою, утворений шарнірний чотириланковик виконаний у площині симетрії пристрою, а на важелі стегна виконано сидіння, причому на важелях гомілки та стопи з обох боків виконані консольні упори. (19) (21) a200812808 (22) 03.11.2008 (24) 10.02.2010 (46) 10.02.2010, Бюл.№ 3, 2010 р. (72) КАПУА ВІКТОР АНАТОЛІЙОВИЧ (73) КАПУА ВІКТОР АНАТОЛІЙОВИЧ (56) SU 977001, 30.11.1982 SU 1174047 A, 23.08.1985 SU 1200916 A, 30.12.1985 SU 1253655 A1, 30.08.1986 SU 1378868 A1, 07.03.1988 SU 1437046 A1, 15.11.1988 SU 1600812 A1, 23.10.1990 RU 10100 U1, 16.06.1999 RU 12029 U1, 09.09.1999 RU 2238125 C2, 20.10.2004 DE 4400820 A1, 20.07.1995 3 щоб бігти природнім способом, а саме це передбачає прототип, треба почергово переставляти ноги спереду назад та навпаки. Причому робити це одночасно. Але, щоб перенести ногу, яка в даний момент знаходиться позаду, уперед, її треба зігнути у коліні. Але цьому заважають пружини коліна, сила яких розрахована на сприйняття ваги спортсмена, плюс динаміка приземлення. Отже, природнім способом перенести ногу вперед майже не можливо. Зробити це можливо лише незграбним переміщенням майже прямих ніг через боки (див [6], що робить біг незручним та спотвореним. У прототипі зміна положення ніг передбачена після відриву пристрою від землі на вишину, яка дозволяє не зачепити випрямленими ногами землю. Але ж при приземленні на одну ногу вона, природно, згинається, а друга нога у цей момент знаходиться позаду у розпрямленому стані, і її нікуди подіти. 2. Складність пристрою - велика кількість важелів, які розташовані з обох боків кожної ноги, недостатня жорсткість шарнірних з'єднань, бо близькість шарнірів до ніг спортсмена обмежує довжину шарнірів; застосування шести пружин; застосування манжетів, які вимагають час на їх одягання та заважають кровотоку. Пружини скручування для утримання ваги дорослого спортсмена, з урахуванням динаміки, в реальності будуть значно більших розмірів, аніж показано на малюнку, їх важко розташувати компактно (вигляд спереду на малюнку прототипу не показано). 3. Надмірна вага пристрою - при приземленні на одну ногу міцність пристрою і енергія пружин повинні бути розраховані на повну вагу спортсмена разом з обома пристроями. Отож, загальна вага обох пристроїв буде вдвічі більшою за ту, що могла би бути у разі стрибка обома ногами разом. Але, якщо на цьому пристрої стрибати обома ногами разом, то міцність та енергоозброєність обох пристроїв буде вдвічі більшою за потрібну. 4. Небезпечність пристрою - в разі втрати рівноваги неможливо з нього зіскочити, або принаймні зігнути ноги (заважають пружини), то ж можливі травми спортсмена. В основу пропонуємого винаходу поставлено задачу створити пристрій для пересування стрибками, обома ногами разом, шляхом об'єднання двох пристроїв в один, зроблений тільки з внутрішнього боку ніг спортсмена, причому важелі, що уособлюють три біоланки ноги, за допомогою четвертої ланки з'єднані в шарнірний чотириланковик, зверху виконано м'яке сидіння, а на важелях стопи та гомілки виконані консольні упори для ніг, що забезпечує простоту та безпеку експлуатації пристрою. Винахід визначають наступні суттєві ознаки: 1. Наявність важелів, які є аналогами біоланок ноги - стопи, гомілки та стегна, послідовно з'єднаних між собою за допомогою шарнірів, розташованих поряд з відповідними шарнірами ніг, причому важелі підпружинені у напрямку прагнення до заняття ними вихідного положення (напівзігнута нога), що фіксується упорами; 2. Виконання важелів виключно з внутрішнього боку ніг спортсмена, у площині симетрії пристрою; 89591 4 3. Важіль стегна та важіль стопи шарнірно з'єднані між собою за допомогою четвертої ланки, тобто усі чотири ланки утворюють класичний замкнений шарнірний чотириланковик; 4. Наявність сидіння на важелі стегна, консольних упорів по боках на важелях гомілки та стопи. Спільною з прототипом є ознака по п. 1. Відрізняюча ознака по п.2 значно спрощує пристрій, зменшуючи кількість важелів і шарнірів, а також підвищує жорсткість шарнірних з'єднань, бо довжина шарнірів не має тих обмежень, що у прототипі. Ознака по п.3 синхронізує рух ланок, що дозволяє використати для їх приведення в дію меншу кількість пружин. Ознаки по п.4 дають можливість спортсмену швидко та комфортно розташуватись на сидінні пристрою та почати стрибки, негаючи часу на вдягання манжетів, а також підвищує безпеку стрибків, бо в разі втрати рівноваги є можливість швидко відвести ноги в бік від консольних упорів і стати на землю. Пристрій, що пропонується, передбачає три варіанти виконання вузлів гальмування енергії приземлення після стрибку: за допомогою пружини розтягнення (варіант І), зтиску (варіант II) та скручування (варіант III). На Фіг.1 зображено боковий вигляд пристрою після відриву від землі (у варіанті І); на Фіг.2 - те ж саме перед стрибком, у стані найбільшої деформації пружини; на Фіг.3 - вигляд А на Фіг.1; на Фіг.4 - вигляд Б на Фіг.1; на Фіг.5 та Фіг.6 - вузол пружини зтиску (варіант II) у позиціях Фіг.1 та 2; на Фіг.7 - вигляд В на Фіг.5; на Фіг.8 та 9 - вузол пружини скручування (варіант III) у позиції на Фіг.1 та 2; на Фіг.10 - вигляд Г на Фіг.8. Тонкими лініями показано контури тіла спортсмена та оточуючу обстановку. На фото Фіг.11-14 показано фрагменти випробувань дослідного зразку пристрою. Пристрій має важелі 1,2,3, які кінематично уособлюють собою три біоланки ноги - відповідно стопу, гомілку та стегно. Важелі з'єднані між собою шарнірами 4 та 5, які розташовані поряд із суглобами ноги - відповідно того, що з'єднує стопу з гомілкою (4) та гомілку зі стегном (5). Важелі 1 та 3, окрім того, з'єднані між собою за допомогою ланки 6, яка приєднана до цих важелів за допомогою шарнірів 7 та 8. Таким чином сформовано класичний замкнений чотириланковик 4-5-8-7. У варіанті І два його протилежні шарніри (5 та 7) зчеплені між собою пружиною розтягнення 9, яка у вихідному положенні піджимає важіль 1 до упорів 10, які закріплені по боках важеля 2 за допомогою болтів 11. У варіанті II (з пружиною зтиску) пружина 9 відсутня, а між важелями 2 та 3 встановлена пружина зтиску 12 (Фіг.5), що одягнена на ковзун 13. Один кінець ковзуна змонтований на важелі 2 за допомогою шарніра 14, а другий кінець ковзуна вільно проходить крізь отвір втулки 15, яка встановлена на важелі 3 за допомогою шарніра 16. 5 Шарнір виконаний на планках 17, закріплених на важелі 3. На Фіг.6 показано положення цих деталей після зтиску пружини 13. У варіанті III (Фіг.8, 9, 10) пружини 9 та 12, а також деталі 13-17 відсутні, а замість того на шарніри 5 та 7 вдягнуті пружини скручування 18 та 19, які протидіють взаємному повороту ланок чотириланковика. На важелі 3 зверху виконано м'яке сидіння 20 з рукоятками 21. На важелі 2 зверху закріплена планка 22, по обох боках котрої приєднані коритоподібні упори 23, облаштовані м'якими обкладинками 24. На важелі 1 знизу виконаний еластичний башмак 25, на який спирається пристрій. На цьому ж важелі зроблені передні упори 26, обернуті м'якою обкладкою 27, а також задні упори 28 кутникового профілю. Пристрій працює наступним чином. Коли пристрій стоїть на землі, спортсмен, притримуючи його за рукоятку 21, заходить спереду, повертається до пристрою спиною і почергово заводить ступні ніг проміж упорів 26 та 28, ставлячи п'ятки на полки упорів 28, а верхом передньої частини стопи торкаючись м'якої обкладки 27 упорів 26. При цьому підошва передньої частини стопи стає безпосередньо на грунт. Гомілки спортсмен притуляє до м'яких обкладок 24 упорів 23, після чого сідає на сидіння 20. Все це потрібно робити, притримуючись однією рукою за щось, що є поряд (дерево, паркан, стіна, плече супутника і т.ін.). Під вагою спортсмена чотириланковик 4-5-87 деформується, відходячи від упорів 10 і деформуючи пружину (пружини). Далі поштовхами ніг спортсмен починає розгойдуватися по вертикалі, додаючи до своєї ваги динамічну складову, нарощуючи деформацію пружини (пружин). Десь на другому - третьому поштовху сила деформованої пружини (пружин) перевищує вагу спортсмена і відбувається стрибок. Далі, продовжуючи поштовхи, можна нарощувати амплітуду, підтримуючи рівновагу і напрямок пересування рухами ніг і нахилами корпусу, тримаючись руками за рукоятки 21. 89591 6 Мінімальна сила поштовхів для підтримування стрибків після початку руху повинна лише компенсувати сили тертя в механізмі та затрати енергії на підтримку рівноваги. Остання складова буде зменшуватися з надбанням стійкого навику керування пристроєм. При збільшенні сили поштовхів амплітуда стрибків нарощується, і найбільше її значення обмежується енергетичними можливостями пружини (пружин). Найбільша допустима деформація чотириланковика обмежується тими же упорами 10 (див. Фіг.2, 6 та 9). Технічний ефект пристрою полягає в тому, що при гальмуванні приземлення спортсмен може розслабити м'язи ніг, переносячи вагу тіла (з урахуванням динаміки) на сидіння, тобто на пружину (пружини), яка потім віддає накопичену енергію для наступного поштовху. Пристрій значно простіший по конструкції та безпечніший в експлуатації, бо в разі загрози падіння у спортсмена є можливість швидко відвести ноги в боки і стати на землю. Дослідний зразок пристрою з використанням пружини зтиску (варіант II) виготовлений кустарним способом у дерево-металевому виконанні (Фіг.11). При цьому ланки 6 зроблені зі звичайних тросів, бо в цьому варіанті вони працюють лише на розтягнення. Зразок випробувано на спортивному майданчику школи № 20 Малиновського району міста Одеси. Фрагменти випробовувань показані на Фіг.12 (стартова позиція) та Фіг.13, 14 (позиції у повітрі). Результати випробовувань показали близькість фактичних параметрів стрибків до теоретичних розрахунків. Література 1. А.с.СССР № 1253655, кл А63В25/10, 1985. 2. А.с.СССР № 1378868, кл А63В25/10, 1988. 3. А.С.СССР № 1600812, кл А63В25/10, 1986. 4. В. Буданов, А. Дятлов. Чудо - башмаки. Газета «Вечерние вести», № 147 (432), 7.09.2000. 5. А.с.СССР № 1174047, кл А63В25/10, 1985. 6. А.с.СССР № 977001, кл А63В25/10, 1982. 7. А.С.СССР № 1200916, кл А63В25/10, 1985. 8. А.с.СССР № 1437046, кл А63В25/10, 1988. 7 89591 8 9 89591 10 11 89591 12 13 Комп’ютерна верстка Л. Литвиненко 89591 Підписне 14 Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for jumping
Автори англійськоюKapua Viktor Anatoliiovych
Назва патенту російськоюУстройство для передвижения прыжками
Автори російськоюКапуа Виктор Анатольевич
МПК / Мітки
МПК: A63B 25/00
Мітки: стрибками, пересування, пристрій
Код посилання
<a href="https://ua.patents.su/7-89591-pristrijj-dlya-peresuvannya-stribkami.html" target="_blank" rel="follow" title="База патентів України">Пристрій для пересування стрибками</a>
Пристрій для пересування на воді
Номер патенту: 9084
Опубліковано: 15.09.2005
Автор: Обертяєв Микола Павлович
МПК: A63B 31/00
Мітки: пристрій, пересування, води
Формула / Реферат:
1. Пристрій для пересування на воді, що має плавники, закріплені до ніг плавця на шарнірах, який відрізняється тим, що плавники виконані у вигляді пари симетричних загрібних площин, з'єднаних між собою шарніром у вигляді стрижня, що являє собою вісь, на якій розташовані пружини крутіння, зачіпки яких взаємодіють з площинами, при цьому через осі проходять отвори болтів, які з'єднують підошву з кріпленням до ніг плавця.2. Пристрій за...
Пристрій для пересування інвалідів
Номер патенту: 79170
Опубліковано: 25.05.2007
Автори: Віщенко Харитон Миколайович, Півоваров Віктор Володимирович, Мікоткіна Тетяна Антонівна, Баєв Павло Олександрович
МПК: A61F 4/00, A61H 3/00, A61F 5/04, A61F 5/01
Мітки: пристрій, пересування, інвалідів
Формула / Реферат:
Пристрій для пересування інвалідів, що включає ортез на нижню кінцівку, виконаний у вигляді послідовно шарнірно сполучених гільз стопи, гомілки і стегна, які виконані у відповідності з анатомічною будовою відповідних сегментів нижньої кінцівки, та корсет, на якому закріплена установочна пластина, сполучена з вертлюгом, закріпленим на ортезі, який відрізняється тим, що корсет виконано у відповідності з анатомічною будовою тулуба з елементами...
Пристрій для пересування і реабілітації хворих з медіальними переломами шийки стегна
Номер патенту: 7817
Опубліковано: 15.07.2005
Автори: Жук Петро Михайлович, Синюченко Юрій Георгійович
МПК: A61H 3/00
Мітки: переломами, стегна, медіальними, хворих, пристрій, шийки, реабілітації, пересування
Формула / Реферат:
Пристрій для пересування і реабілітації хворих з медіальними переломами шийки стегна, який відрізняється тим, що містить корпус із шарніром в задньому лівому куті верхньої рами, брезентове сидіння, що монтується при посадці пацієнта, та колеса із можливістю повертання в них навколо вертикальної осі на 360°.
Пристрій для пересування у трубопроводі
Номер патенту: 35817
Опубліковано: 16.04.2001
Автори: Гусєв Олексій Володимирович, Карпачов Юрій Андрійович, Рудик Юрій Микитович, Анупрієнко Генадій Ефремович
МПК: B08B 9/04
Мітки: трубопроводі, пересування, пристрій
Формула / Реферат:
1. Пристрій для пересування у трубопроводі, який містить у собі дволанковий механізм із приводом осьового зворотно-поступального переміщення однієї ланки відносно другої, кожна ланка якого має засіб для фіксації у трубопроводі, який відрізняється тим, що засіб для фіксації у трубопроводі виконано у вигляді рухомо приєднаних пружинних упорів з опорними роликами, при цьому між опорними роликами та відповідною ланкою встановлено клиновий...
Пристрій для пересування у трубопроводі
Номер патенту: 31922
Опубліковано: 15.12.2000
Автори: Гусєв Олексій Володимирович, Березнюк Володимир Володимирович, Анупрієнко Геннадій Ефремович, Мізьов Віталій Віссаріонович, Рудик Юрій Микитович, Карпачов Юрій Андрійович
МПК: B08B 9/04
Мітки: трубопроводі, пристрій, пересування
Текст:
...трубопроводу. Поставлена задача вирішується тим, що у пристрої для перес\вання у трубо проводі, який містить у собі двохланковий механізм, кожна ланка якого має засіб для фіксації у трубопроводі, згідно винаходу між двома ланками встановлено гнучкий дволанковий механізм із приводом зворотно-поступального пересування однієї ланки відносно другої Крім того, як один із прикладів виконання гнучкого приводу пропонується використати не гнучкий...
Попередній патент: Свердловинна струминна установка для каротажних робіт та спосіб її роботи
Наступний патент: Бурова установка та спосіб буріння
Випадковий патент: Спосіб хірургічного лікування рецидивних пахвинних гриж