Вузол машини для збирання коренеплодів, машина з таким вузлом і спосіб управління такою машиною




Формула / Реферат
1. Вузол машини для збирання коренеплодів, що містить: витягуючі засоби (17, 19) для витягування коренеплодів, транспортувальні засоби (27) для транспортування коренеплодів і
засоби (23, 21) для підтримки робочої глибини витягуючих засобів (17, 19), що задається на рівні першої величини (Е), який відрізняється тим, що транспортувальні засоби (27) виконані рухомими щодо витягуючих засобів (17, 19), а також додатково містить засоби для підтримки незмінною висоти підйому транспортувальних засобів (27) щодо ґрунту, що задається на рівні другої величини (С), незалежної від першої величини (Е).
2. Вузол за п. 1, який відрізняється тим, що вказані засоби для підтримки робочої глибини (Е) вказаних витягуючих засобів (17, 19) є автоматичними.
3. Вузол за будь-яким із пп. 1 або 2, який відрізняється тим, що вказані засоби для підтримки висоти підйому (С) вказаних транспортувальних засобів (27) є автоматичними.
4. Вузол за будь-яким із пп. 2 або 3, який відрізняється тим, що містить першу опорну конструкцію (15), яка несе вказані витягуючі засоби (17, 19), другу опорну конструкцію (25), яка несе вказані транспортувальні засоби (27), щонайменше один перший виконуючий орган (21), що забезпечує зміну висоти підйому вказаної першої опорної конструкції (25), щонайменше один другий виконуючий орган (31), який забезпечує зміну положення вказаної другої опорної конструкції (25) щодо вказаної першої опорної конструкції (15), щонайменше один перший датчик (23), який забезпечує генерацію сигналу, що характеризує конфігурацію ґрунту (7), щонайменше другий датчик (33), який забезпечує генерацію сигналу, що характеризує положення вказаної другої опорної конструкції (25) щодо вказаної першої опорної конструкції (15), щонайменше один орган задання величин (С, Е) (37) і щонайменше один належним чином запрограмований обчислювальний пристрій (35), який забезпечує обробку інформації, що надходить від вказаних першого датчика (23) і другого датчика (33) і від вказаних засобів (37) задання величин (С, Е), що забезпечує управління вказаними першим виконуючим органом (21) і другим виконуючим органом (31).
5. Вузол за п. 4, який відрізняється тим, що вказана друга опорна конструкція (25) встановлена з можливістю повороту щодо вказаної першої опорної конструкції (15), при цьому вказаний другий датчик (33) забезпечує генерацію сигналу, що характеризує кут повороту вказаної другої опорної конструкції (25) щодо вказаної першої опорної конструкції (15).
6. Вузол за п. 4, який відрізняється тим, що вказана друга конструкція встановлена з можливістю поступального переміщення щодо вказаної першої конструкції, при цьому вказаний другий датчик забезпечує генерацію сигналу, що характеризує лінійне переміщення вказаної другої конструкції щодо вказаної першої конструкції.
7. Вузол за будь-яким із пп. 4-6, який відрізняється тим, що вказані виконуючі органи (21, 31) вибрані з групи, що включає гідравлічні, пневматичні, електричні, електромагнітні і кремальєрні виконуючі органи.
8. Вузол за будь-яким із пп. 1-7, який відрізняється тим, що вказані витягуючі засоби є витягуючими органами, вибраними з групи, що включає диски (19) з сошниками (17), вібролемеші, нерухомі лемеші, колеса, а вказані транспортувальні засоби (27) вибрані з групи, що включає валики, турбіни, стрічкові конвеєри.
9. Вузол за будь-яким із пп. 1-8, який відрізняється тим, що вказані засоби (21, 23) виконані з можливістю незалежного регулювання глибини вказаних витягуючих засобів з правого і лівого боку вузла для підтримки робочої глибини витягуючих засобів (17, 19) і висоти підйому вказаних транспортувальних засобів (27).
10. Машина для збирання коренеплодів, що має раму (1), встановлену на ряді коліс (3, 5), яка відрізняється тим, що містить вузол за будь-яким із пп. 1-9, з'єднаний із вказаною рамою (1).
11. Машина за п. 10, яка відрізняється тим, що вказаний вузол з'єднаний з вказаною рамою (1) в двох передніх точках і в одній задній точці, причому вказані дві передні точки є двома виконуючими органами (21), а вказана задня точка є пасивним механічним шарніром (29).
12. Спосіб збирання врожаю за допомогою машини для збирання коренеплодів, яка містить вузол, виконаний за будь-яким із пп. 1-9, який відрізняється тим, що здійснюють регулювання відносних положень вказаних витягуючих засобів (17, 19) і вказаних транспортувальних засобів (27) так, щоб висота підйому вказаних транспортувальних засобів (27) залишалася, по суті постійною щодо ґрунту (7), на рівні заданої величини (С), а робоча глибина вказаних витягуючих засобів (17, 19) залишалася на рівні заданої величини (Е), незалежної від величини (С) висоти підйому вказаних транспортувальних засобів (27).
13. Спосіб за п. 12 управління вузлом за п. 2, відповідно до якого вручну підтримують висоту підйому вказаних транспортувальних засобів на рівні її власної величини (С) і автоматично підтримують робочу глибину витягуючих засобів на рівні її власної величини (Е).
14. Спосіб за п. 12 управління вузлом за п. 3, відповідно до якого автоматично підтримують висоту підйому вказаних транспортувальних засобів на рівні її власної величини (С) і вручну підтримують робочу глибину вказаних витягуючих засобів на рівні її власної величини (Е).
15. Спосіб за п. 12 управління вузлом за п. 2 або 3, відповідно до якого автоматично підтримують висоту підйому вказаних транспортувальних засобів (27) і глибину вказаних витягуючих засобів (17, 19) на рівні їхніх відповідних власних величин (С, Е).
16. Спосіб за будь-яким із пп. 12-15, який відрізняється тим, що, коли вказаний вузол проходить по опуклості, спочатку підводять витягуючі засоби (17, 19), спочатку опускають транспортувальні засоби (27) щодо вказаних витягуючих засобів (17, 19) з відповідною затримкою за часом, що визначається швидкістю переміщення вказаного вузла, його геометрією і його інерцією, після чого, також використовуючи відповідну затримку за часом, опускають витягуючі засоби (17, 19), потім підводять транспортувальні засоби (27) щодо витягуючих засобів (17, 19) і, нарешті, опускають транспортувальні засоби з поверненням їхньої початкової конфігурації після того, як опуклість пройдена за цими засобами.
17. Спосіб за будь-яким із пп. 12-16, який відрізняється тим, що, коли вказаний вузол проходить по западині, спочатку опускають витягуючі засоби (17, 19), потім підводять транспортувальні засоби (27) щодо витягуючих засобів (17, 19) з відповідною затримкою за часом, що визначається швидкістю переміщення вказаного вузла, його геометрією і його інерцією, після чого, також використовуючи відповідну затримку за часом, підводять витягуючі засоби (17, 19), потім опускають транспортувальні засоби (27) щодо витягуючих засобів (17, 19) і, нарешті, підводять транспортувальні засоби з поверненням їхньої початкової конфігурації після того, як западина пройдена за цими засобами.
18. Спосіб за будь-яким із пп. 12-17, який відрізняється тим, що впливають різним чином з правого і лівого боку на регулювання глибини витягуючих засобів (17, 19) і висоти підйому транспортувальних засобів (27) для підтримки цих витягуючих і транспортувальних засобів паралельними ґрунту.
Текст
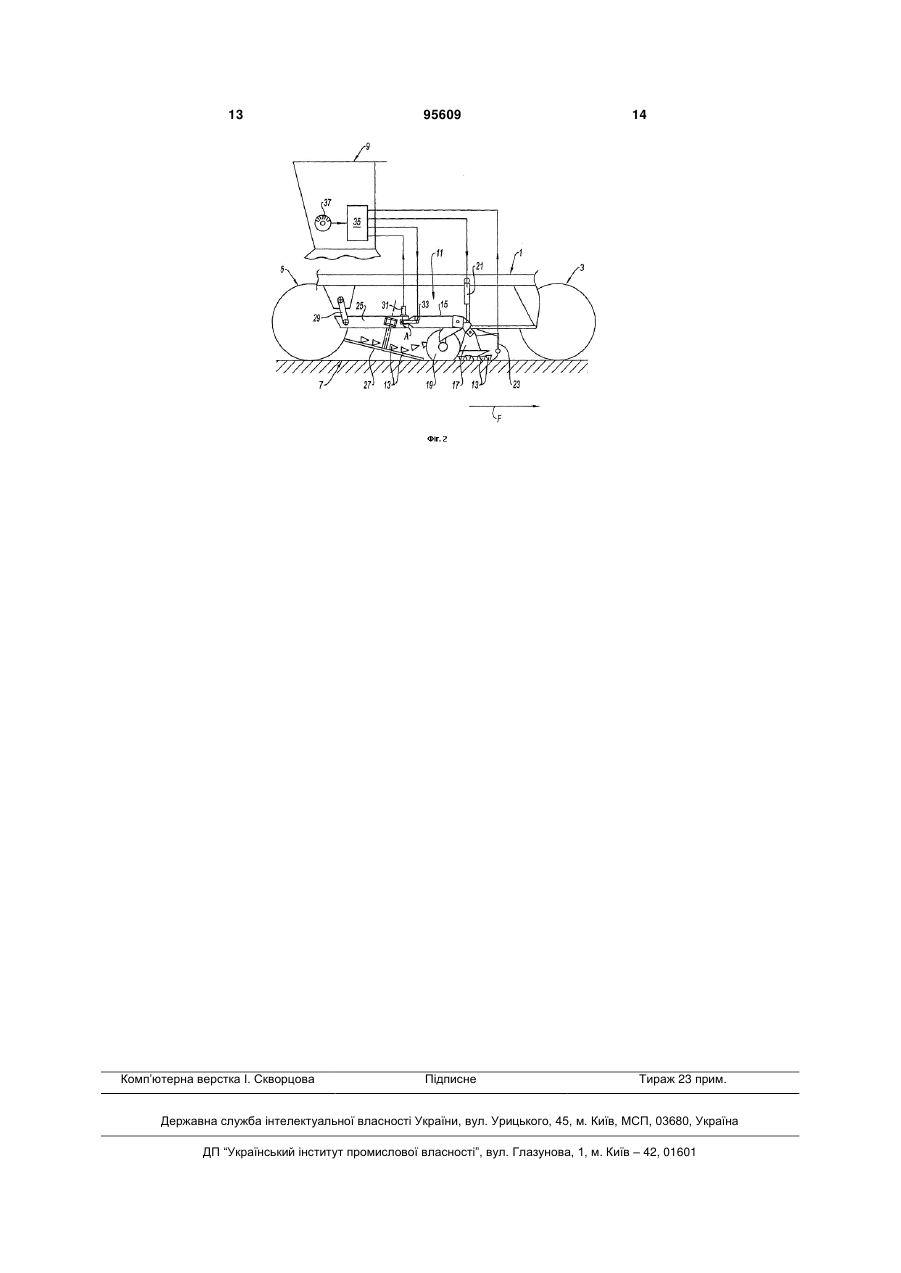
1. Вузол машини для збирання коренеплодів, що містить: витягуючі засоби (17, 19) для витягування коренеплодів, транспортувальні засоби (27) для транспортування коренеплодів і засоби (23, 21) для підтримки робочої глибини витягуючих засобів (17, 19), що задається на рівні першої величини (Е), який відрізняється тим, що транспортувальні засоби (27) виконані рухомими щодо витягуючих засобів (17, 19), а також додатково містить засоби для підтримки незмінною висоти підйому транспортувальних засобів (27) щодо ґрунту, що задається на рівні другої величини (С), незалежної від першої величини (Е). 2. Вузол за п. 1, який відрізняється тим, що вказані засоби для підтримки робочої глибини (Е) вказаних витягуючих засобів (17, 19) є автоматичними. 3. Вузол за будь-яким із пп. 1 або 2, який відрізняється тим, що вказані засоби для підтримки 2 (19) 1 3 95609 4 лінійне переміщення вказаної другої конструкції щодо вказаної першої конструкції. 7. Вузол за будь-яким із пп. 4-6, який відрізняється тим, що вказані виконуючі органи (21, 31) вибрані з групи, що включає гідравлічні, пневматичні, електричні, електромагнітні і кремальєрні виконуючі органи. 8. Вузол за будь-яким із пп. 1-7, який відрізняється тим, що вказані витягуючі засоби є витягуючими органами, вибраними з групи, що включає диски (19) з сошниками (17), вібролемеші, нерухомі лемеші, колеса, а вказані транспортувальні засоби (27) вибрані з групи, що включає валики, турбіни, стрічкові конвеєри. 9. Вузол за будь-яким із пп. 1-8, який відрізняється тим, що вказані засоби (21, 23) виконані з можливістю незалежного регулювання глибини вказаних витягуючих засобів з правого і лівого боку вузла для підтримки робочої глибини витягуючих засобів (17, 19) і висоти підйому вказаних транспортувальних засобів (27). 10. Машина для збирання коренеплодів, що має раму (1), встановлену на ряді коліс (3, 5), яка відрізняється тим, що містить вузол за будь-яким із пп. 1-9, з'єднаний із вказаною рамою (1). 11. Машина за п. 10, яка відрізняється тим, що вказаний вузол з'єднаний з вказаною рамою (1) в двох передніх точках і в одній задній точці, причому вказані дві передні точки є двома виконуючими органами (21), а вказана задня точка є пасивним механічним шарніром (29). 12. Спосіб збирання врожаю за допомогою машини для збирання коренеплодів, яка містить вузол, виконаний за будь-яким із пп. 1-9, який відрізняється тим, що здійснюють регулювання відносних положень вказаних витягуючих засобів (17, 19) і вказаних транспортувальних засобів (27) так, щоб висота підйому вказаних транспортувальних засобів (27) залишалася, по суті постійною щодо ґрунту (7), на рівні заданої величини (С), а робоча глибина вказаних витягуючих засобів (17, 19) залишалася на рівні заданої величини (Е), незалежної від величини (С) висоти підйому вказаних транспортувальних засобів (27). 13. Спосіб за п. 12 управління вузлом за п. 2, відповідно до якого вручну підтримують висоту підйому вказаних транспортувальних засобів на рівні її власної величини (С) і автоматично підтримують робочу глибину витягуючих засобів на рівні її власної величини (Е). 14. Спосіб за п. 12 управління вузлом за п. 3, відповідно до якого автоматично підтримують висоту підйому вказаних транспортувальних засобів на рівні її власної величини (С) і вручну підтримують робочу глибину вказаних витягуючих засобів на рівні її власної величини (Е). 15. Спосіб за п. 12 управління вузлом за п. 2 або 3, відповідно до якого автоматично підтримують висоту підйому вказаних транспортувальних засобів (27) і глибину вказаних витягуючих засобів (17, 19) на рівні їхніх відповідних власних величин (С, Е). 16. Спосіб за будь-яким із пп. 12-15, який відрізняється тим, що, коли вказаний вузол проходить по опуклості, спочатку підводять витягуючі засоби (17, 19), спочатку опускають транспортувальні засоби (27) щодо вказаних витягуючих засобів (17, 19) з відповідною затримкою за часом, що визначається швидкістю переміщення вказаного вузла, його геометрією і його інерцією, після чого, також використовуючи відповідну затримку за часом, опускають витягуючі засоби (17, 19), потім підводять транспортувальні засоби (27) щодо витягуючих засобів (17, 19) і, нарешті, опускають транспортувальні засоби з поверненням їхньої початкової конфігурації після того, як опуклість пройдена за цими засобами. 17. Спосіб за будь-яким із пп. 12-16, який відрізняється тим, що, коли вказаний вузол проходить по западині, спочатку опускають витягуючі засоби (17, 19), потім підводять транспортувальні засоби (27) щодо витягуючих засобів (17, 19) з відповідною затримкою за часом, що визначається швидкістю переміщення вказаного вузла, його геометрією і його інерцією, після чого, також використовуючи відповідну затримку за часом, підводять витягуючі засоби (17, 19), потім опускають транспортувальні засоби (27) щодо витягуючих засобів (17, 19) і, нарешті, підводять транспортувальні засоби з поверненням їхньої початкової конфігурації після того, як западина пройдена за цими засобами. 18. Спосіб за будь-яким із пп. 12-17, який відрізняється тим, що впливають різним чином з правого і лівого боку на регулювання глибини витягуючих засобів (17, 19) і висоти підйому транспортувальних засобів (27) для підтримки цих витягуючих і транспортувальних засобів паралельними ґрунту. Даний винахід стосується машин для збирання коренеплодів типу буряка, а в більш загальному плані - до машин для витягування продуктів з ґрунту. Як добре відомо, машина для збирання буряка містить, зокрема, витягуючий вузол, що містить засоби, які забезпечують висмикування плодів буряка з ґрунту, а також транспортувальний вузол, розташований по ходу руху машини за витягуючим вузлом і забезпечуючий транспортування плодів буряка в зону зберігання, що знаходиться або в самій машині, або зовні від неї (наприклад, в тракторному причепі). Традиційні машини можуть бути обладнані спеціальною системою, що дозволяє підтримувати на практично постійному рівні глибину проникнення витягуючих засобів в ґрунт, не дивлячись на наявність в ній різних нерівностей. Завдяки такій системі можна гарантувати, що витягуючі засоби збережуть свою робочу глибину 5 при виникненні значних нерівностей, внаслідок чого вдасться запобігти як небезпеці неякісного витягування плодів буряка, так і їх дуже глибокому проникненню в ґрунт, що сприяє захопленню надмірно великого об'єму землі, і/або дії на них значних зусиль, здатних викликати механічну деформацію деяких вузлів машини. У такій відомій системі, де передбачений механічний зв'язок між витягуючими і транспортувальними засобами, будь-яка зміна робочої глибини витягуючих засобів веде за собою і одночасну зміну підйому засобів, транспортувань. Таким чином, зменшення робочої глибини витягуючих засобів неминуче приводить до одночасного підйому транспортувальних засобів, при цьому виникає небезпека випадання плодів буряка з їхньої нижньої частини. І навпаки, при збільшенні робочої глибини витягуючих засобів неминуче відбувається одночасне опускання транспортувальних засобів, що сприяє захопленню дуже великого об'єму землі. Для усунення вказаних недоліків необхідно передбачити повну зупинку машини і виконання трудомістких операцій розбирання і подальшого повторного збирання з метою зміни відносних рівнів підйому витягуючих і транспортувальних засобів. Задача винаходу якраз і полягає в розробці засобів, які дозволили б усунути ці недоліки. Вказана задача досягається за допомогою вузла машини для збирання коренеплодів, що містить: витягуючі засоби для витягування коренеплодів, транспортувальні засоби для транспортування коренеплодів, засоби для підтримки у реальному часі робочої глибини витягуючих засобів на рівні першої величини (Е), причому вказаний вузол відрізняється тим, що вказані транспортувальні засоби виконані рухомими щодо вказаних витягуючих засобів, і тим, що він містить засоби для підтримки у реальному часі підйому вказаних транспортувальних засобів на рівні заданої другої величини (С). Завдяки таким ознакам витягуючі засоби опиняються дещо незалежними від транспортувальних засобів, дійсно, вибір величини (Е) робочої глибини витягуючих засобів ніяк не впливає на висоту підйому транспортувальних засобів, яка задана уставкою (С), і навпаки. В результаті вдається змінювати у реальному часі, без необхідності зупиняти при цьому машину, по-перше, робочу глибину (Е) витягуючих засобів, і/або, по-друге, висоту (С) підйому транспортувальних засобів, причому незалежно один від одного. Відповідно до інших можливих ознак вузла згідно з винаходом вказані засоби для підтримки робочої глибини вказаних витягуючих засобів є автоматичними; вказані засоби для підтримки висоти підйому вказаних транспортувальних засобів є автоматичними; вказаний вузол містить першу опорну констру 95609 6 кцію, що несе вказані витягуючі засоби, другу опорну конструкцію, що несе вказані транспортувальні засоби, щонайменше один перший виконуючий орган, який забезпечує зміну висоти підйому вказаної першої опорної конструкції, щонайменше один другий виконуючий орган, який забезпечує зміну положення вказаної другої опорної конструкції щодо вказаної першої опорної конструкції, щонайменше один перший датчик, який забезпечує генерацію сигналу, що характеризує конфігурацію ґрунту, щонайменше один другий датчик, який забезпечує генерацію сигналу, що характеризує положення вказаної другої опорної конструкції щодо вказаної першої опорної конструкції, щонайменше один орган фіксації уставки і щонайменше один належним чином запрограмований обчислювальний пристрій, що забезпечує обробку інформації, яка надходить від вказаних першого і другого датчиків і від вказаних засобів задання уставки, і відповідне управління вказаними першим і другим виконуючими органами; вказана друга опорна конструкція встановлена з можливістю повороту щодо вказаної першої опорної конструкції, при цьому вказаний другий датчик забезпечує генерацію сигналу, що характеризує кут повороту вказаної другої опорної конструкції щодо вказаної першої опорної конструкції, внаслідок чого досягається виключно просте технічне рішення проблеми шарнірного з'єднання один з одним цих двох опорних конструкцій; вказана друга опорна конструкція встановлена з можливістю поступального переміщення щодо вказаної першої опорної конструкції, при цьому вказаний другий датчик забезпечує генерацію сигналу, що характеризує лінійне переміщення вказаної другої опорної конструкції щодо вказаної першої опорної конструкції; вказані виконуючі органи вибрані з групи, що включає гідравлічні, пневматичні, електричні, електромагнітні і кремальєрні (із зубчатими рейками) виконуючі органи, причому на ринку є найрізноманітніші моделі таких органів; вказані витягуючі засоби є витягуючими органами, вибраними з групи, що включає дискові сошники, вібролемеші, нерухомі лемеші, колеса, а вказані транспортувальні засоби вибрані з групи, що включає валики, турбіни, стрічкові конвеєри, так що, як можна бачити, подібні витягуючі і транспортувальні засоби є цілком звичайними, традиційно використовуваними в технології збирання буряка; вказаний вузол містить засоби для різної дії з правого і лівого боку на регулювання глибини вказаних витягуючих засобів і висоти підйому вказаних транспортувальних засобів. Винахід охоплює також машину для збирання коренеплодів, що має раму, змонтовану на ряду коліс, яка відрізняється тим, що вона містить вузол типу описаного вище, сполучений із вказаною рамою. Відповідно до однієї з ознак даної машини, вказаний вузол сполучений із вказаною рамою в двох передніх точках і в одній задній точці, причому вказані дві передні точки є двома виконуючими органами, а вказана задня точка є механічним 7 шарніром, так що можна бачити, що тут застосована класична для бурякозбиральних машин триточкова підвіска, що забезпечує фіксацію пропонованого вузла на існуючих машинах без якихнебудь особливих додаткових заходів для її адаптації. Предметом винаходу є також спосіб управління вузлом типу, описаного вище, який відрізняється тим, що регулюють у реальному часі відносні положення вказаних витягуючих засобів і вказаних транспортувальних засобів так, щоб висота підйому вказаних транспортувальних засобів залишалася, по суті, постійною щодо ґрунту, на рівні їхньої власної величини (С), а робоча глибина вказаних витягуючих засобів залишалася на рівні їхньої власної величини (Е). Відповідно до інших факультативних ознак цього способу: - регулюють висоту підйому вказаних транспортувальних засобів і глибину вказаних витягуючих засобів автоматично; - вручну підтримують висоту підйому вказаних транспортувальних засобів на рівні їхньої власної величини (С) і автоматично підтримують робочу глибину вказаних витягуючих засобів на рівні їхньої власної величини (Е); - автоматично підтримують висоту підйому вказаних транспортувальних засобів на рівні їхньої власної величини (С) і вручну підтримують робочу глибину вказаних витягуючих засобів на рівні їхньої власної величини (Е); - автоматично підтримують висоту підйому вказаних транспортувальних засобів і глибину вказаних витягуючих засобів на рівні їхніх відповідних власних величин (С, Е), що дозволяє звільнити оператора від необхідності виконувати які б то не було дії; - коли вказаний вузол проходить по опуклості, спочатку підводять вказані витягуючі засоби, потім опускають вказані транспортувальні засоби щодо вказаних витягуючих засобів з відповідною затримкою часу, що визначається швидкістю переміщення вказаного вузла, його геометрією і його інерцією, після чого, також, використовуючи відповідну затримку часу, опускають вказані витягуючі засоби, потім підводять вказані транспортувальні засоби щодо вказаних витягуючих засобів і, нарешті, опускають вказані транспортувальні засоби з поверненням їхньої початкової конфігурації після того, як опуклість пройдена за цими засобами; - коли вказаний вузол проходить по западині, спочатку опускають вказані витягуючі засоби, потім підводять вказані транспортувальні засоби щодо вказаних витягуючих засобів з відповідною затримкою часу, що визначається швидкістю переміщення вказаного вузла, його геометрією і його інерцією, після чого, також, використовуючи відповідну затримку часу, підводять вказані витягуючі засоби, потім опускають вказані транспортувальні засоби щодо вказаних витягуючих засобів і, нарешті, підводять вказані транспортувальні засоби з поверненням їхньої початкової конфігурації після того, як западина пройдена за цими засобами; - впливають різним чином з правого і лівого боку на регулювання глибини вказаних витягуючих 95609 8 засобів і висоти підйому вказаних транспортувальних засобів з метою підтримки цих витягуючих і транспортувальних засобів паралельними ґрунту. Решта ознак і переваг винаходу виявляється з розгляду опису, що приводиться нижче, в поєднанні з кресленням, на якому схематично представлена машина згідно з цим винаходом. На цьому кресленні зображена машина для збирання буряка, що має несучу балку 1, яка встановлена на двох передніх осях 3 і однієї задньої осі 5, що забезпечують котіння машини по ґрунту 7. Ця машина забезпечена також кабіною 9, в якій знаходиться водій (не показаний). Звичайний напрям пересування бурякозбиральної машини показаний на кресленні стрілкою F, а поняття «вправо» і «вліво» слід розуміти як «упоперек» щодо цього напряму. Вказана бурякозбиральна машина має підвішений до несучої балки 1 вузол 11, що забезпечує, з одного боку, витягування плодів 13 буряка з ґрунту 7, а з іншого боку - транспортування цих плодів в зону зберігання (не показана), що знаходиться або усередині машини, або зовні від неї (наприклад, на вантажівці, що слідує за машиною). В частині машини, яка є передньою у напрямку її переміщення, вузол 11 забезпечений першою опорною конструкцією 15, на якій встановлені засоби для витягування плодів 13 буряка. У показаному тут прикладі ці витягуючі засоби містять пари традиційних нерухомих лемешів 17 і/або дисків, що обертаються, 19, забезпечуючих ефективне витягування плодів 13 буряка з ґрунту 7. У звичайних умовах налічується до півдюжини таких пар лемешів/дисків, які розподілені, по суті, уздовж поперечного напряму. Зрозуміло, винахід у жодному випадку не обмежується використанням подібних витягуючих засобів, так що можна з таким же успіхом передбачити вібролемеші, нерухомі лемеші, колеса й інші пристрої, широко відомі фахівцям. Перша опорна конструкція 15 з'єднана з несучою балкою 1 за допомогою ряду (як правило, двох) силових циліндрів 21 (на кресленні з них видний тільки один), які поміщені справа і зліва від осі переміщення машини і можуть бути гідравлічними, пневматичними, електричними, електромагнітними або кремальєрними. Спереду від першої опорної конструкції 15 закріплені датчики 23 відомого типу, які забезпечують визначення висоти підйому першої опорної конструкції 15 щодо ґрунту 7. Як правило, поміщають по одному датчику 23 на кожному кінці (у напрямку упоперек переміщення) опорної конструкції 15, тобто один справа і один зліва. За такі датчики, які є у вільному продажу, можна використовувати, наприклад, механічні щупи або датчики ультразвукового типу. За першою опорною конструкцією 15 знаходиться друга опорна конструкція 25, на якій змонтовані засоби 27 для транспортування плодів 13 буряка. Ці транспортувальні засоби можуть, як прави 9 ло, бути ґратами (як у випадку, показаному на кресленні), що обертаються, які відомі також під назвою «турбін», валиками або стрічковими конвеєрами, які добре відомі фахівцям. Вказані транспортувальні засоби сполучаються із засобами зберігання (не показані) плодів буряку типу бункерів, які можуть знаходитися або усередині машини, або зовні від неї, наприклад, в причепі, що буксується трактором, який рухається за машиною. Друга опорна конструкція 25 пасивно підвішена до несучої балки 1 за допомогою тяги 29 або ж простого або кульового шарніра, що добре відомі фахівцям. Друга опорна конструкція 25 змонтована шарнірно з'єднаною, а точніше, як видно в даному прикладі, поворотною щодо першої опорної конструкції 15 навколо осі А, поперечною у відношенні до напрямку переміщення машини. Між першою 15 і другою 25 опорними конструкціями поміщений щонайменше один виконуючий орган 31 гідравлічного, пневматичного, електричного, електромагнітного або кремальєрного типу з можливістю дії на нахил цих двох опор відносно однієї щодо іншої. Передбачений також щонайменше один датчик, що забезпечує визначення кута нахилу другої опорної конструкції 25 щодо першої опорної конструкції 15. Перейдемо до детального розгляду електронної системи управління, що взаємодіє з описаними вище механічними органами. До складу цієї електронної системи управління входять обчислювальний пристрій 35, сполучений за допомогою відповідних електричних схем, зокрема, із силовим циліндром 21, датчиком 23 висоти підйому, силовим циліндром 31, датчиком 33 кута, а також з кнопкою 37 фіксації величини (Е) робочої глибини, яка знаходиться в кабіні 9. Якщо говорити конкретніше, обчислювальний пристрій 35 має можливість дії на силові циліндри 21 і 31 у відповідності, по-перше, з сигналами, що надходять з датчиків 23, 33, і по-друге, з уставкою 37. Якщо виразитися ще точніше, обчислювальний пристрій 35 програмується так, щоб можна було забезпечити виконання перерахованих нижче дій. Оператор, що знаходиться в кабіні 9, користуючись кнопкою 37, задає величину (Е) робочої глибини. Виходячи з цієї уставки, обчислювальний пристрій 35 регулює висоту підйому силових циліндрів 21 так, щоб лемеші 17 і диски 19 проникали в ґрунт 7 на потрібну глибину. При цьому обчислювальний пристрій 35 регулює силовий циліндр 31 так, щоб висота підйому транспортувальних засобів 27 щодо ґрунту не мінялася, тобто залишалася на рівні величини (С). Виконання розглянутої вище операції регулювання виявляється можливим завдяки датчику 33, який видає в обчислювальний пристрій 35 дані про відносні положення першої опорної конструкції 15 і другої опорної конструкції 25. Для цього в пам'ять обчислювального пристрою 35 введена таблиця 95609 10 значень, за допомогою якої він може визначити, виходячи з інформації, що надійшла від датчика 23 висоти підйому, до якого положення датчика 33 треба дійти шляхом подовження або укорочення штоків силових циліндрів 31, щоб забезпечити підтримку постійної висоти підйому транспортувальних засобів 27 щодо ґрунту відповідно до заданої величини (С). Коли датчики 23 висоти підйому виявляють зміни рельєфу ґрунту 7, обчислювальний пристрій 35 обробляє сигнали, що надходять від них, і проводить регулювання силових циліндрів 21 і 41, щоб, по-перше, залишалася практично постійною висота підйому транспортувальних засобів 27 щодо ґрунту 7 (величина (С)), і, по-друге, залишалася практично постійною робоча глибина лемешів 17 і/або дисків 19 в ґрунті 7 (уставка Е). В результаті, з одного боку, плоди 13 буряка можуть майже завжди доходити до потрібної висоти підйому за допомогою лемешів 17 і дисків 19, дякуючи чому їх вдається надійно захоплювати і без пошкодження витягувати з ґрунту 7, а з іншого боку, немає небезпеки дуже глибокого проникнення транспортувальних засобів 27 в ґрунт із захопленням, відповідно, надмірного об'єму землі і, навпаки, небезпеки того, що вони знаходитимуться дуже високо, так що плоди буряка будуть падати донизу. Якщо говорити точніше, коли датчики 23 виявляють різкий підйом рівня ґрунту 7, а саме наявність опуклості, обчислювальний пристрій 35 послідовно видає, при необхідності з тимчасовою затримкою, яка узгоджена, по-перше, із швидкістю переміщення машини і, по-друге, з відносним розташуванням датчиків 23, витягуючих засобів 17, 19 і транспортувальних засобів 27, наступні команди: на укорочення штоків силових циліндрів 21, дякуючи чому підводиться перша опорна конструкція 15 і, отже, лемеші 17 і диски 19, і дію на силовий циліндр 31 з метою повороту другої опорної конструкції 25 щодо першої опорної конструкції 15 в такому напрямі, щоб забезпечувався рух вниз цієї другої опорної конструкції 25 із запобіганням при цьому підйому транспортувальних засобів щодо ґрунту (підтримка уставки С), потім: на подовження штоків силових циліндрів 21, дякуючи чому опускається перша опорна конструкція 15 і, отже, лемеші 17 і диски 19, так що вони повертаються в початкове положення і залишаються на рівні уставки глибини Е, і дію на силовий циліндр 31 з метою повороту другої опорної конструкції 25 щодо першої опорної конструкції 15 в такому напрямі, щоб забезпечувався рух вгору цієї другої опорної конструкції 25 з підтримкою при цьому уставки величини висоти (С) підйому транспортувальних засобів і запобіганням їх опусканню щодо ґрунту, і, нарешті: на подовження штоків силових циліндрів 31, з тим щоб повернути другу опорну конструкцію 25 щодо першої опорноїконструкції 15 в такому напрямі, щоб забезпечувався рух вниз цієї другої опорної конструкції 25, унаслідок чого вказані транспортувальні засоби опускаються, повертаючись в початкове положення, і залишаються на висоті підйому щодо ґрунту, відповідній величині (С). 11 Коли датчики 23 виявляють різкий провал в ґрунті 7, має місце послідовне виконання описаних вище операцій в зворотному порядку, тобто штоки силових циліндрів 21 починають подовжуватися, а силовий циліндр 31 регулюється так, щоб підвести транспортувальні засоби 27, потім штоки силових циліндрів 21 коротшають, а штоки силових циліндрів 31 подовжуються, унаслідок чого транспортувальні засоби 27 опускаються, і, нарешті, штоки силових циліндрів 31 коротшають, підводячи транспортувальні засоби і повертаючи їх в початкове положення з підтримкою їх висоти підйому на рівні величини (С). Слід зазначити, що описану вище роботу машини можна зробити ефективнішою, передбачивши по два силові циліндри 21 і два датчики 23, відповідно, з правого і лівого боку, - якщо справа і зліва від машини мають місце різні зміни рельєфу ґрунту, то можна буде надавати різну дію на силові циліндри 21, а також на циліндри 31, якщо вони теж передбачені з обох боків машини. В результаті підтримка висоти підйому транспортувальних засобів щодо ґрунту і робочої глибини витягуючих засобів можна забезпечити з необхідною рівномірністю по всій ширині машини. Як можна зрозуміти з наведеного вище опису, завдяки винаходу в нашому розпорядженні опиняються засоби, що забезпечують можливість підтримки у реальному часі, тобто у міру переміщення машини по ґрунту 7, а також одночасно, поперше, висоти підйому транспортувальних засобів щодо ґрунту (величина С) і, по-друге, робочої глибини витягуючих засобів (величина Е). Таке регулювання у реальному часі може здійснюватися або після виявлення датчиками 23 порушення рівності рельєфу ґрунту 7, або після того, як водій змінив величину (Е) робочої глибини витягуючих засобів, задану за допомогою кнопки 37. Оператор може у будь-який момент зробити зміну величини (Е) глибини витягуючих засобів без зміни при цьому величини (С) висоти підйому транспортувальних засобів і навпаки завдяки обчислювальному пристрою 35, який автоматично на 95609 12 дасть дію на силові циліндри 21 і 31, з тим щоб були дотримані нові незалежні величини (Е) і (С). Повинно бути абсолютно очевидним, що винахід у жодному випадку не обмежується описаним вище варіантом здійснення, який був розглянутий лише як приклад. Так, наприклад, у разі, коли датчики 23 висоти підйому виявляють опуклість або виїмку, можна негайно привести в дію силові циліндри 21 в такому напрямі, щоб забезпечити підтримку величини (Е), але при цьому буде зайвим приводити в дію силові циліндри 31 спочатку в одному, а потім в іншому напрямі, як зазначалося вище, оскільки створювані при цьому зсуви по висоті підйому транспортувальних засобів будуть дуже короткочасними і незначними, якщо врахувати незначну відстань між датчиками 23 і транспортувальними засобами 27. Проте при такому спрощенні роботи обчислювальний пристрій 35, звичайно, продовжуватиме підтримувати на постійному рівні висоту підйому транспортувальних засобів (величина С) незалежно від будь-яких змін у реальному часі робочої глибини витягуючих засобів (величина (С), що задається кнопкою 37) і, навпаки, підтримувати на постійному рівні робочу глибину витягуючих засобів незалежно від будь-яких змін у реальному часі висоти підйому транспортувальних засобів, внаслідок чого автоматично буде безперервно зберігатися дотримання обчислювальним пристроєм 35 вказаних величин (Е) і (С), як це було роз'яснено вище. Крім того, можна вжити заходів до того, щоб друга опорна конструкція 25 була змонтована з можливістю поступального переміщення щодо першої опорної конструкції 15, і в цьому випадку датчик, поміщений між цими двома конструкціями, зможе видавати сигнал, що характеризує лінійне переміщення вказаної другої конструкції щодо вказаної першої конструкції. Можна також виконати таку конструкцію, в якій ці дві опорні конструкції не матимуть прямого механічного зв'язку одна з іншою. 13 Комп’ютерна верстка І. Скворцова 95609 Підписне 14 Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAssembly for a machine for root harvesting, machine equipped with such an assembly and method for controlling said machine
Автори англійськоюPatrick Jean Marie Ballu
Назва патенту російськоюУзел машины для уборки корнеплодов, машина с таким узлом и способ управления такой машиной
Автори російськоюПатрик Жан Мари Баллю
МПК / Мітки
МПК: A01D 25/00, A01B 63/111, A01D 17/02, A01D 33/14, A01D 27/04
Мітки: управління, збирання, коренеплодів, машина, вузлом, вузол, такою, машини, спосіб, таким, машиною
Код посилання
<a href="https://ua.patents.su/7-95609-vuzol-mashini-dlya-zbirannya-koreneplodiv-mashina-z-takim-vuzlom-i-sposib-upravlinnya-takoyu-mashinoyu.html" target="_blank" rel="follow" title="База патентів України">Вузол машини для збирання коренеплодів, машина з таким вузлом і спосіб управління такою машиною</a>
Машина для збирання коренеплодів

Номер патенту: 90079
Опубліковано: 12.04.2010
Автор: Жетт Етьєн
МПК: A01D 17/00
Мітки: збирання, машина, коренеплодів
Формула / Реферат:
1. Машина (1) для збирання коренеплодів, яка має:- ходову частину, двигун, колеса і кабіну,- засіб (19) для тимчасового збереження коренеплодів,- засоби (17а-17с) для транспортування/очищення зазначених коренеплодів,- засоби для очищення коренеплодів від землі, що розташовані всередині засобу тимчасового збереження (19) й містять щонайменше один рольганг (30) з валиками (31),яка відрізняється тим, що...
Спосіб керування збиральною машиною, спосіб визначення шляху керованої збиральної машини для збирання врожаю сільськогосподарської культури на лану та спосіб розділення зібраного продукту для збиральної машини
Номер патенту: 92501
Опубліковано: 10.11.2010
Автори: Пікетт Теренс Деніел, Хендріксон Ларрі Лі
МПК: A01B 69/00
Мітки: продукту, лану, шляху, зібраного, спосіб, сільськогосподарсько, машини, збирання, розділення, керування, машиною, збиральної, збиральною, керованої, культури, визначення, врожаю
Формула / Реферат:
1. Спосіб керування збиральною машиною для збирання врожаю сільськогосподарської культури на лану, який включає наступні стадії:а) стадію, на якій одержують специфічну для ділянки інформацію, яка включає інформацію про відмітку висоти лану та багатоспектральне зображення лану, причому інформація відноситься до однієї або кількох властивостей сільськогосподарської культури;б) стадію, на якій специфічну для ділянки інформацію...
Машина для збирання коренеплодів
Номер патенту: 9165
Опубліковано: 30.09.1996
Автори: Покуса Олексій Олександрович, Ривлін Валерій Олександрович, Умеренко Аркадій Аркадійович, Кузьмінов Вадим Георгійович, Збарський Борис Абрамович, Русанов Іван Іванович
МПК: A01B 69/00, A01D 27/00, A01D 25/04
Мітки: збирання, машина, коренеплодів
Формула / Реферат:
Машина для уборки корнеплодов, преимущественно кормовой свеклы, содержащая раму, на которой установлены корнеизвлекающие и транспортирующие рабочие органы и клинообразный щуп, состоящий из двух контактных полозков, отличающаяся тем, что, с целью повышения эффективности работы, она снабжена установленным перед щупом клинообразным с вершиной, направленной по ходу движения, устройством для выравнивания корнеплодов вдоль оси рядка, а...
Машина для збирання гички коренеплодів

Номер патенту: 7756
Опубліковано: 26.12.1995
Автори: Покуса Олексій Олександрович, Пшенишнюк Микола Панасович, Пономарьов Володимир Миколайович, Воронов Борис Михайлович, Кравченко Олексій Степанович, Константиновський Михайло Йосипович, Ривлін Валерій Олександрович, Кузьмінов Вадим Георгійович, Бородай Леонід Євгенович, Шерман Станіслав Самуілович, Чух Маріан Каленикович
МПК: A01D 23/02
Мітки: гички, машина, збирання, коренеплодів
Формула / Реферат:
Машина для уборки ботвы корнеплодов, содержащая подвижную раму, несущую приемный транспортер и фронтально установленные впереди него валы, несущие лопастные ножи с размещенными над ними битерами, отличающаяся тем, что, с целью повышения производительности и надежности технологического процесса, она снабжена размещенной перед битерами гребенкой, жестко закрепленной своим основанием на подвижной раме, и закрепленными на валах дисками,...
Машина для збирання гички коренеплодів
Номер патенту: 7716
Опубліковано: 26.12.1995
Автори: Чернявський Спиридон Васильович, Ривлін Валерій Олександрович, Хміль Микола Дмитрович, Барвінко Олександр Самійлович, Динкін Марат Борисович
МПК: A01D 23/02
Мітки: гички, збирання, коренеплодів, машина
Формула / Реферат:
1. Машина для уборки ботвы корнеплодов, содержащая ботвоудаляющее устройство и расположенные поперечно шнековый транспортер со встречной навивкой для сужения потока ботвы, выгрузной элеватор с размещенным ботвошвыряльным устройством в его верхней части и приемным лотком в его нижней части и битер для подачи ботвы со шнекового транспортера на приемный лоток, отличающаяся тем, что, с целью улучшения загрузки транспортных средств, повышения...
Попередній патент: Газотурбінна установка з турбінами високого і низького тиску протилежного обертання
Наступний патент: Спосіб модернізації установки для одержання сечовини, спосіб та установка для одержання сечовини
Випадковий патент: Спосіб уретероілеорезервуарного анастомозу при формуванні артифіціального сечового міхура