Багатоступеневий інтегро-диференціатор
Номер патенту: 98055
Опубліковано: 10.04.2015
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
Формула / Реферат
Багатоступеневий інтегро-диференціатор, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із першого та другого співвісних сильфонів, суміжні торці яких з'єднані з спільним рухомим фланцем і установлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна тяга підсумовуючого механізму є виходом інтегро-диференціатора, який відрізняється тим, що в перетворювачі додатково установлені третій сильфон з першим порожнистим фланцем, з'єднаними з першим сильфоном і спільним рухомим фланцем, з утворенням першої порожнини, і четвертий сильфон з другим порожнистим фланцем, з'єднаними з другим сильфоном і спільним рухомим фланцем з утворенням другої порожнини, а також між вузлом приймання вхідних сигналів і перетворювачем додатково установлений розподілювач потоку робочої рідини, виконаний у вигляді корпусу, зв'язаного з напрямною, і співвісно з ним розміщеного золотника з глухим в одному торці осьовим отвором, сполученим гідролінією з вузлом приймання вхідних сигналів, і двома радіально розміщеними по діаметру отворами з можливістю одного отвору послідовно через сім перших каналів в корпусі і додатково встановлену першу жорстку гідролінію і порожнистий фланець сполучатися з першою порожниною, а другого отвору послідовно через сім других каналів в корпусі і додатково встановлену другу жорстку гідролінію і другий порожнистий фланець - з другою порожниною перетворювача, причому із перших семи каналів дросель встановлений в другому, четвертому і шостому, а із других семи каналів в першому, третьому, п'ятому і сьомому каналах, і другий торець золотника через додатково установлену тягу зв'язаний з виходом інтегро-диференціатора.
Текст
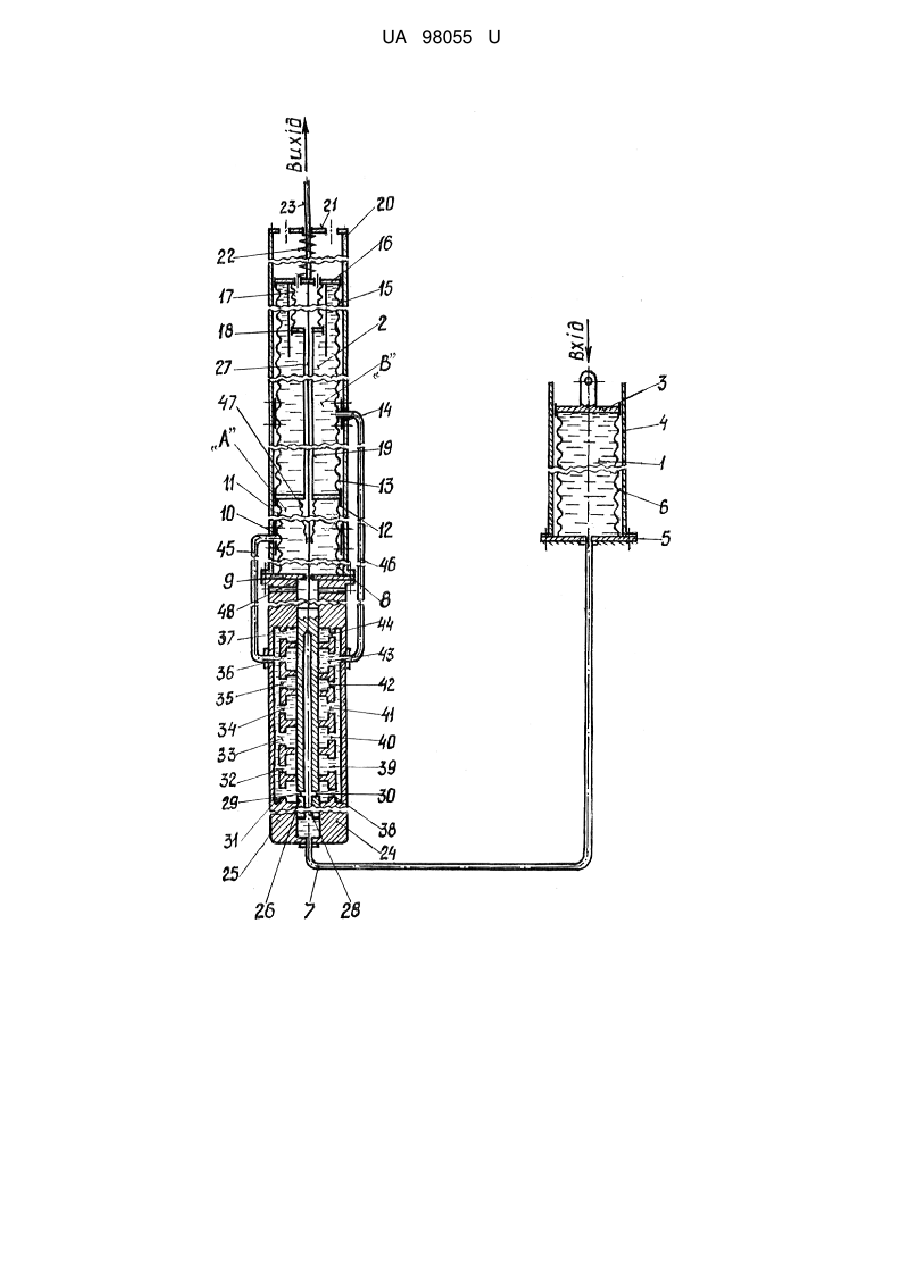
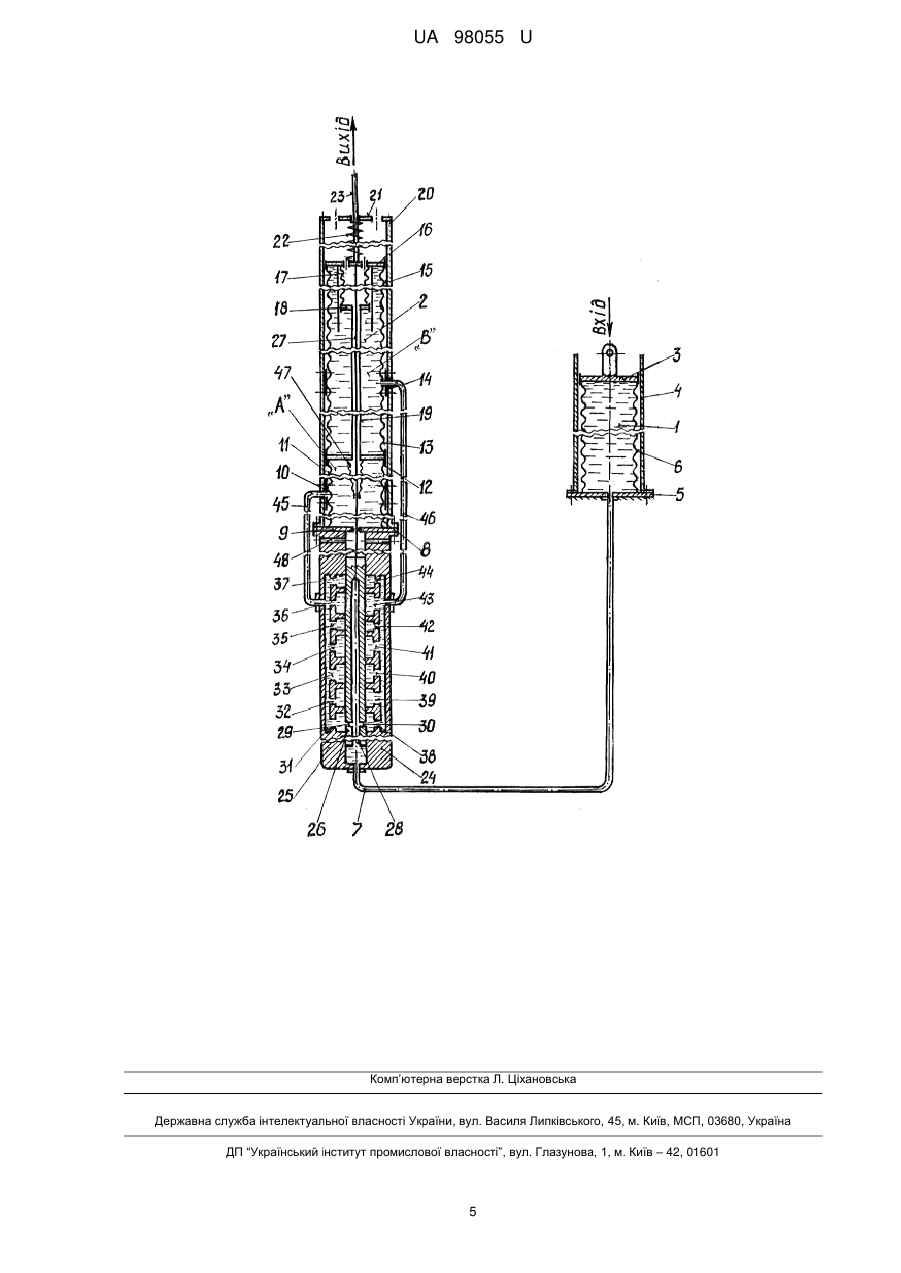
Реферат: Багатоступеневий інтегро-диференціатор містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із першого та другого співвісних сильфонів, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна тяга підсумовуючого механізму є виходом інтегро-диференціатора. Додатково установлені третій і четвертий сильфони, розподілювач потоку робочої рідини, виконаний у вигляді корпусу, зв'язаного з напрямною, і співвісно з ним розміщеного золотника. UA 98055 U (54) БАГАТОСТУПЕНЕВИЙ ІНТЕГРО-ДИФЕРЕНЦІАТОР UA 98055 U UA 98055 U 5 10 15 20 25 30 35 40 45 50 55 Інтегро-диференціатор належить до засобів систем автоматики неелектричного типу і може бути використаний для послідовного багатоступеневого інтегрування і диференціювання неелектричних сигналів у механічних, гідравлічних і пневматичних і комбінованих системах автоматичного регулювання (CAP) і керування (САК) з метою покращення їх динамічних властивостей. Із відомих, найбільш близький за технічною суттю і реалізацією до заявленого є диференціатор неелектричних сигналів, що містить підсумовуючий механізм у вигляді сильфона, розміщеного усередині другого сильфона у напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем другого сильфона, а другим торцем - із спільним рухомим фланцем перетворювача сигналів (див. Авторське свідоцтво СРСР № 746565). Однак відомий диференціатор одноступеневий, має обмежені функціональні можливості та область застосування, оскільки не може здійснювати операцію послідовного багатоступеневого інтегрування. Отже, відомий гідравлічний диференціатор має обмежені функціональні можливості та область застосування. Тому в основу корисної моделі поставлено задачу розширити функціональні можливості та область застосування диференціатора. З метою розширення функціональних можливостей і області застосування пропонується його удосконалення, суттєві ознаки якого полягають в можливості послідовної багатоступеневої реалізації в перехідних процесах функціональних операцій, починаючи з інтегрування і далі по черзі різної тривалості диференціювання, інтегрування і закінчуючи будь-якою з них кінцевою операцією, що розширить область застосування його в CAP і САК із різними за інерційністю динамічними ланками. Для розв'язання даної задачі в перетворювачі сигналів додатково установлені третій сильфон з першим порожнистим фланцем, з'єднаним з першим сильфоном і спільним рухомим фланцем, з утворенням першої порожнини, і четвертий сильфон з другим порожнистим фланцем, з'єднаними з другим сильфоном і спільним рухомим фланцем, з утворенням другої порожнини. Між вузлом приймання вхідних сигналів і перетворювачем додатково установлений розподілювач, виконаний у вигляді корпусу, зв'язаного з напрямною і, співвісно з ним розміщеного, золотника. Золотник з глухим в одному торці осьовим отвором гідролінією сполучений з вузлом приймання вхідних сигналів, і двома радіальними розміщеними по діаметру отворами з можливістю одного отвору послідовно через більше принаймні три перші виконані в корпусі канали і додатково установлену першу жорстку гідролінію і перший порожнистий фланець сполучатися з першою порожниною перетворювача, а другого отвору послідовно через принаймні три другі в корпусі канали і додатково установлену другу жорстку гідролінію і другий порожнистий фланець - з його другою порожниною. Із перших трьох каналів в корпусі дросель установлений в другому, четвертому, шостому і так далі, а із других каналів - в першому, третьому, п'ятому і так далі каналах. Підсумовуючий механізм виконаний у вигляді сильфона, розміщеного всередині четвертого сильфона у напрямній втулці і з'єднаного одним торцем з другим рухомим фланцем четвертого сильфона, а другим торцем через порожнисту тягу - із спільним рухомим фланцем. Причому другий торець золотника через додатково установлену в порожнистій тязі підсумовуючого механізму тягу зв'язаний з виходом інтегродиференціатора. При такому технічному рішенні забезпечується можливість залучення вихідних сигналів зворотного зв'язку для переміщення золотника розподілювача, і, перерозподілом робочої рідини, що надходить із вузла приймання вхідних сигналів, в перехідних процесах послідовно багатоступенево змінювати функції диференціатора. При цьому настроюванням дроселів каналів подачі робочої рідини в першу і другу порожнини перетворювача можна безступенево змінювати постійні часу інтегро-диференціатора, працюючого на режимах інтегрування, диференціювання, інтегрування, диференціювання і так далі сигналів, а також тривалість складових його перехідних процесів. Таким чином, сигнал на виході запропонованого багатоступеневого інтегро-диференціатора буде складатися із наступних сигналів, викликаних: - першого - змінюванням вхідного сигналу; - другого, четвертого, шостого і так далі - пропорційного інтегралу змінювання вхідного сигналу; - третього, п'ятого, сьомого і так далі - пропорційного швидкості (першій похідній) змінювання вхідного сигналу. 1 UA 98055 U 5 10 15 20 25 30 35 40 45 50 55 60 Перебором настроювань дроселів в каналах корпуса розподілювача забезпечується можливе, залежно від інерційності динамічних ланок CAP і САК, досягнення будь-яких складових вихідних сигналів у запропонованому інтегро-диференціаторі. На представленому кресленні схематично показано загальний вигляд багатоступеневого інтегро-диференціатора. Багатоступеневий інтегро-диференціатор містить вузол 1 приймальних вхідних сигналів та їх перетворювач 2. Вузол 1 включає рухомий фланець 3, що переміщується в циліндричній напрямній 4, жорстко з'єднаній з нерухомим фланцем 5 сильфона 6, порожнина якого гідролінією 7 сполучається з порожнинами гідравлічного перетворювача 2. Перетворювач містить перший виконавчий сильфон 8, один торець якого зв'язаний з нерухомим фланцем 9, а другий торець - із першим додатковим нерухомим порожнистим фланцем 10. До фланця 10 одним торцем приєднаний другий виконавчий сильфон 11, протилежний торець якого з'єднаний із спільним рухомим фланцем 12, зв'язаним з одним торцем третього виконавчого сильфона 13, а його протилежний торець - з другим нерухомим порожнистим фланцем 14. З другого боку до фланця 14 одним торцем приєднаний четвертий виконавчий сильфон 15, протилежний торець якого зв'язаний з другим рухомим фланцем 16 з приєднаним до нього одним торцем диференціюючого сильфона 17, другий торець якого зв'язаний з рухомим фланцем 18, з'єднаним порожнистою тягою 19 із спільним рухомим фланцем 12. Рухомі фланці 12, 16 переміщуються в нерухомій циліндричній напрямній 20, до якої приєднаний з отворами фланець 21 і є сідлом відновлювальної пружини 22, яка протилежним боком впирається у фланець 16, забезпечуючи повернення його і зв'язаної з ним вихідної тяги 23 у вихідне положення, а також усунення механічного гістерезису матеріалу стінок сильфонів. До нерухомого фланця 9 приєднаний розподілювач 24 потоку робочої рідини, який включає корпус 25, з'єднаний гідролінією 7 з вузлом 1 і золотник 26, зв'язаний тягою 27, що проходить крізь порожнисту тягу 19, з вихідною тягою 23 інтегро-диференціатора. В золотнику 26 виконаний осьовий отвір 28 і діаметрально від нього розміщені два радіальних отвори 29, 30, а звільняюча при переміщенні золотника порожнина сполучена через отвори в корпусі з атмосферою. В зоні робочої ділянки золотника в корпусі розміщені розділені між собою перші сім каналів 31, 32 з дроселем, 33, 34 з дроселем, 35 і 36 з дроселем і 37, а також сім других каналів 38 з дроселем, 39, 40 з дроселем, 41, 42 з дроселем, 43, 44 з дроселем, з можливим сполученням радіальних отворів 29, 30 золотника з першою порожниною "А" і другою порожниною "В" перетворювача сигналів. При цьому, залежно від положення золотника 26 з його осьовим отвором 28, перша порожнина "А" може сполучатися через радіальний отвір 29, канал 31 безпосередньо, канал 32 з дроселем, канал 33 безпосередньо і так далі, а також додатково установлені гідролінію 45 і перший порожнистий фланець 10, а друга порожнина "В" через радіальний отвір 30, канал 38 з дроселем, канал 39 безпосередньо, канал 40 з дроселем і так далі, а також додатково установлені гідролінію 46 і другий порожнистий фланець 14. Герметичність в рухомих з'єднаннях тяга 27 - фланець 12 забезпечується гофрованим чохлом 47, а в з'єднанні тяга 27 - корпус 25 - ущільненням 48. Працює багатоступеневий інтегро-диференціатор наступним чином. На першому ступені роботи, при відсутньому вхідному сигналу, під дією пружини 22 рухомі фланці 16, 18, 12 і зв'язана з ними тяга 27 золотника 26 знаходяться в крайньому нижньому положенні, при якому отвір 29 розміщений проти отвору каналу 31, а отвір 30 - проти отвору каналу 38 з дроселем. При різкому збільшенні вхідного сигналу приймального вузла 1 (переміщенні рухомого фланця 3) через наявність дроселя 38 тиск у порожнині "В" буде наростати повільніше, ніж у порожнині "А" перетворювача 2. В результаті фланець 12 переміститься догори і через порожнисту тягу 19 перемістить за собою фланець 18, сильфона 17, створюючи додаткове зменшення приросту тиску робочої рідини у порожнині "В", внаслідок чого другий рухомий фланець 16 і зв'язана з ним тяга 23 вихідного сигналу одержить додаткове зменшення переміщення. Таким чином, відбудеться віднімання двох переміщень, тобто вихідний сигнал на даному ступені сигнал від дії вхідного сигналу, буде складатися із переміщення, викликаного змінюванням вхідного сигналу (переміщення фланця 3 і збільшення через те тиску у порожнині "А") і переміщення, викликаного зменшеною швидкістю (першою похідною, обумовленою різними швидкостями руху фланців 12, 16) змінювання вхідного сигналу і додатковим зменшенням через те тиску у порожнині "В". Отже, на першому ступені багатоступеневий інтегро-диференціатор працює як інтегруюча динамічна ланка систем автоматики. На другому ступені після проходження отворами 29, 30 золотника каналів 31, 38 корпусу в ньому відкриваються отвори 32 з дроселем і 39 безпосереднього перетікання робочої рідини. 2 UA 98055 U 5 10 15 20 25 30 35 40 45 50 55 Але через наявність дроселя 32 тиск у порожнині "А" буде наростати повільніше, ніж у порожнині "В". В результаті фланець 12 переміститься донизу і через порожнисту тягу 19 перемістить за собою фланець 18 сильфона 17, створюючи додаткове збільшення приросту тиску робочої рідини у порожнині "В", внаслідок чого рухомий фланець 16 і зв'язана з ним тяга 23 вихідного сигналу одержить додаткове збільшення переміщення. Таким чином, на другому ступені роботи вже відбудеться додавання двох переміщень, тобто вихідний сигнал інтегродиференціатора, буде складатися із переміщення, викликаного змінюванням вхідного сигналу (переміщення фланця 3 і збільшення через те тиску у порожнині "В") і переміщення, викликаного збільшеною швидкістю (першою похідною, обумовленою різними швидкостями руху фланців 12, 16) змінювання вхідного сигналу і додатковим збільшенням через те тиску у порожнині "В". Отже, на другому ступені багатоступеневий інтегро-диференціатор вже буде працювати як диференціююча динамічна ланка. На третьому ступені після проходження отворами 29, 30 золотника каналів 32, 39 корпусу в ньому відкриваються отвори 33 безпосереднього перетікання робочої рідини і 40 з дроселем. При подальшому різкому збільшенні вхідного сигналу і через наявність дроселя 38 тиск у порожнині "В" буде наростати повільніше, ніж у порожнині "А". В результаті фланець 12 переміститься догори і через порожнисту тягу 19 за собою перемістить фланець 18 сильфона 17, створюючи додаткове зменшення приросту тиску робочої рідини у порожнині "В", внаслідок чого рухомий фланець 16 і зв'язана з ним тяга 23 вихідного сигналу одержить додаткове зменшення переміщення. Як на першому, так і на третьому ступені теж відбудеться віднімання двох переміщень, і вихідний сигнал при цьому буде складатися із переміщення, викликаного змінюванням вхідного сигналу (зростаючим переміщенням фланця 3 і збільшенням тиску у порожнині "А") і переміщення, викликаного зменшеною швидкістю (першою похідною, обумовленою різними швидкостями руху фланців 12, 16) змінювання вхідного сигналу і додатковим зменшенням через те тиску у порожнині "В". Таким чином, на третьому, як і на першому ступені багатоступеневий інтегро-диференціатор працює як динамічна інтегруюча ланка. На четвертому ступені після проходження отворами 29, 30 золотника каналів 33, 40 корпусу в ньому відкриваються отвори 41 безпосереднього перетікання робочої рідини і 34 з дроселем. Від різкого збільшення вхідного сигналу і через наявність дроселя 34 тиск у порожнині "А" буде наростати повільніше, ніж у порожнині "В". В результаті фланець 12 переміститься донизу і через порожнисту тягу 19 перемістить за собою фланець 18 сильфона 17, створюючи додаткове збільшення приросту тиску робочої рідини у порожнині "В", внаслідок чого рухомий фланець 16 і зв'язана з ним тяга 23 вихідного сигналу одержить додаткове збільшення переміщення. Таким чином, на четвертому, як і на другому ступені, відбудеться додавання двох переміщень і вихідний сигнал інтегро-диференціатора, від дії вхідного сигналу (переміщення фланця 3 і через те збільшення тиску у порожнині " В"), а також переміщення, викликаного збільшеною швидкістю (першою похідною, обумовленою різними швидкостями руху фланців 12, 16) змінювання вхідного сигналу і додатковим зменшенням через те тиску у порожнині "В". На четвертому, як і на другому ступені, багатоступеневий інтегро-диференціатор буде працювати як диференціююча динамічна ланка. Аналогічно буде працювати інтегро-диференціатор на п'ятому, шостому і сьомому ступенях, причому на п'ятому ступені як інтегруюча, шостому - диференціююча і сьомому - інтегруюча динамічні ланки. У випадку різкого звільнення рухомого фланця 3 на всіх ступенях описаний інтегродиференціатор буде працювати аналогічно з тією лише різницею, що вихідні переміщення рухомих фланців і зв'язаних з ними деталей будуть направлені в протилежний бік. У цих випадках інтегро-диференціатор теж буде працювати як інтегруюча, диференціююча, інтегруюча, диференціююча і інтегруюча динамічна ланка, забезпечуючи фланцю 16 четвертого сильфона 15 і вихідній тязі 23 переміщення пропорційне змінюванню вхідного сигналу і оберненій за знаком швидкості (першій похідній) його змінювання. У випадку повільного змінювання вхідного сигналу вузла 1, тиск робочої рідини в сильфоні 6 теж буде змінюватися повільно і перепад тисків у сильфонах 8, 11, 13, 15 практично буде відсутній. При цьому рухомі фланці 12, 16, 18 будуть переміщатися з однаковою швидкістю. В результаті на всіх режимах тяга 23 буде переміщатися і передавати вихідний сигнал, викликаний тільки змінюванням вхідного сигналу. В цьому випадку запропонований інтегро-диференціатор буде працювати як підсилювальна динамічна ланка. 3 UA 98055 U 5 10 15 Таким чином, запропонований багатоступеневий інтегро-диференціатор за своїми функціональними можливостями являє собою підсилювально-інтегро-диференціюючу динамічну ланку. Застосування запропонованого багатоступеневого інтегро-диференціатора, порівняно з уже відомим, дасть можливість: - розширити функції можливого багатоступеневого послідовного інтегрування і диференціювання вхідних сигналів з одночасним їх гідравлічним підсумовуванням; - здійснювати ступеневий відбір вихідних сигналів для формування контурів регулювання і керування параметрів одного або кількох об'єктів; - забезпечувати в перехідних процесах необхідний час і амплітуду відхилення параметрів регулювання і керування; - підвищити точність функціонування CAP і САК з інерційними виконавчими механізмами систем автоматики; - розширити область застосування переважно на САК і CAP, які працюють за принципом відхилення керуючого або регулюючого параметра і збурюючого збурення. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 Багатоступеневий інтегро-диференціатор, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із першого та другого співвісних сильфонів, суміжні торці яких з'єднані з спільним рухомим фланцем і установлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна тяга підсумовуючого механізму є виходом інтегро-диференціатора, який відрізняється тим, що в перетворювачі додатково установлені третій сильфон з першим порожнистим фланцем, з'єднаними з першим сильфоном і спільним рухомим фланцем, з утворенням першої порожнини, і четвертий сильфон з другим порожнистим фланцем, з'єднаними з другим сильфоном і спільним рухомим фланцем з утворенням другої порожнини, а також між вузлом приймання вхідних сигналів і перетворювачем додатково установлений розподілювач потоку робочої рідини, виконаний у вигляді корпусу, зв'язаного з напрямною, і співвісно з ним розміщеного золотника з глухим в одному торці осьовим отвором, сполученим гідролінією з вузлом приймання вхідних сигналів, і двома радіально розміщеними по діаметру отворами з можливістю одного отвору послідовно через сім перших каналів в корпусі і додатково встановлену першу жорстку гідролінію і порожнистий фланець сполучатися з першою порожниною, а другого отвору послідовно через сім других каналів в корпусі і додатково встановлену другу жорстку гідролінію і другий порожнистий фланець - з другою порожниною перетворювача, причому із перших семи каналів дросель встановлений в другому, четвертому і шостому, а із других семи каналів в першому, третьому, п'ятому і сьомому каналах, і другий торець золотника через додатково установлену тягу зв'язаний з виходом інтегродиференціатора. 4 UA 98055 U Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюBozhok Arkadii Mykhailovych, Ponedilok Vadym Vitaliiovych
Автори російськоюБожок Аркадий Михайлович, Понедилок Вадим Витальевич
МПК / Мітки
МПК: G06C 5/00
Мітки: багатоступеневий, інтегро-диференціатор
Код посилання
<a href="https://ua.patents.su/7-98055-bagatostupenevijj-integro-diferenciator.html" target="_blank" rel="follow" title="База патентів України">Багатоступеневий інтегро-диференціатор</a>
Комбінований інтегро-диференціатор
Номер патенту: 96879
Опубліковано: 25.02.2015
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
МПК: C06C 5/00
Мітки: інтегро-диференціатор, комбінований
Формула / Реферат:
Комбінований інтегро-диференціатор, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із першого та другого співвісних сильфонів, суміжні торці яких з'єднані з спільним рухомим фланцем і встановлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна тяга підсумовуючого механізму є виходом інтегро-диференціатора, який...
Інтегро-диференціатор неелектричних сигналів
Номер патенту: 51744
Опубліковано: 26.07.2010
Автори: Понеділок Володимир Францович, Божок Аркадій Михайлович
МПК: G06C 5/00
Мітки: інтегро-диференціатор, неелектричних, сигналів
Формула / Реферат:
Інтегро-диференціатор неелектричних сигналів, що містить вузол приймання вхідних сигналів, дросель і перетворювач, складений із двох співвісних сильфонів, суміжні торці яких з'єднані з рухомим фланцем і встановлені в напрямній, і підсумовуючого механізму, зв'язаного з одним із протилежних торців співвісних сильфонів і рухомим фланцем, причому вихідна ланка підсумовуючого механізму є виходом інтегро-диференціатора, який відрізняється тим, що...
Комбінований диференціатор
Номер патенту: 31232
Опубліковано: 25.03.2008
Автори: Божок Аркадій Михайлович, Понеділок Володимир Францович
МПК: G06G 5/00
Мітки: диференціатор, комбінований
Формула / Реферат:
Комбінований диференціатор, що містить підсумовуючий механізм, два сильфони, з'єднані один з одним торцями рухомим фланцем і установлені в напрямній, і вузол приймання вхідних сигналів, зв'язаний через дросель з першим сильфоном і через рухомий фланець з другим сильфоном за допомогою гнучкого шланга, другий торець другого сильфона з'єднаний з другим рухомим фланцем, при цьому підсумовуючий механізм виконаний у вигляді сильфона, розміщеного...
Диференціатор божка а.м.

Номер патенту: 28690
Опубліковано: 25.12.2007
Автор: Божок Аркадій Михайлович
МПК: G06G 5/00
Мітки: божка, а.м, диференціатор
Формула / Реферат:
Диференціатор, що містить перетворювач з двома співвісними сильфонами, суміжні торці яких з'єднані з першим рухомим фланцем, другий торець першого сильфона з'єднаний з нерухомим фланцем і корпусом-напрямною, в якій розміщені перший і другий сильфони, а також перший підсумовуючий механізм, виконаний у вигляді третього сильфона, розміщеного коаксіально у другому сильфоні в напрямній втулці і з'єднаного одним торцем з третім рухомим фланцем...
Диференціатор сигналів систем автоматики неелектричного типу
Номер патенту: 31153
Опубліковано: 25.03.2008
Автори: Понеділок Вадим Віталійович, Божок Аркадій Михайлович
Мітки: сигналів, диференціатор, неелектричного, систем, типу, автоматики
Формула / Реферат:
Диференціатор сигналів систем автоматики неелектричного типу, що містить підсумовуючий важіль, вузол приймання вхідних сигналів, з'єднаний через дросель з першим сильфоном перетворювача і безпосередньо - з другим сильфоном, жорстко з'єднаним з першим сильфоном через фланець, зв'язаний тягою з одним із кінців підсумовуючого важеля, а сильфони перетворювача і вузла приймання вхідних сигналів розміщені в циліндричних напрямних втулках, жорстко...
Попередній патент: Лава для жиму штанги лежачи (горизонтальна)
Наступний патент: Кондитерський виріб “талер”
Випадковий патент: Спосіб готування торта "ай-петрі"