Підйомник
Номер патенту: 98189
Опубліковано: 25.04.2012
Автори: Реутова Анастасія Миколаївна, Міщенко Олександр Іванович, Малахов Олексій Олександрович, Федоренко Сергій Володимирович
Формула / Реферат
Підйомник, що містить плити, шарнірно з'єднані між собою за допомогою важелів, при цьому дві пари важелів, шарнірно з'єднаних з відповідною плитою, та пару паралельних їм важелів, в якій кожний шарнірно одним кінцем прикріплений до відповідної плити, який відрізняється тим, що вищеназвані дві пари важелів кінцями, протилежними до кінців, поєднаних з плитою, шарнірно з'єднані з двома важелями довжиною у два рази більшою, ніж кожна з ланок вищеназваних пар, які хрестоподібно з'єднані між собою посередині за допомогою шарніра, до якого приєднаний додатковий важіль, розташований паралельно плитам, з довжиною, що дорівнює відстані між шарнірами кріплення до плит двох пар важелів та кожного з пари паралельних їм важелів, протилежний кінець якого шарнірно зв'язаний з двома додатковими важелями, протилежні кінці яких шарнірно з'єднані з парою важелів, що мають шарніри, розташовані на відповідних плитах на відстані від точки кріплення шарнірів до плит двох пар важелів, що дорівнює довжині додаткового важеля, паралельного плитам, крім цього, до цих протилежних кінців двох додаткових важелів приєднано ще два важелі з довжиною, що дорівнює довжині попереднього важеля, паралельного плитам, також паралельно плитам, при цьому ці два важелі з'єднані відповідно другим кінцем з шарнірами на кінцях хрестоподібно з'єднаних між собою двох важелів, також підйомник, обладнаний тросом та механізмом його натягу, при цьому трос розташований між рівновіддаленими від плити кінцями хрестоподібно з'єднаних важелів, на одному з цих кінців трос закріплений нерухомо, а через інший кінець з роликом трос направлений вздовж важеля, з'єднуючого цей ролик з плитою, і через інший ролик на плиті, трос спрямований до механізму натягу, підйомник також має в своєму складі штангу з роликом, яка протилежним від цього ролика кінцем консольно та жорстко закріплена на плиті перпендикулярно їй в точці сходження двох пар важелів з плитою, при цьому на початку підйому, трос спрямований від точки його закріплення через ролик на штанзі до механізму натягу троса.
Текст
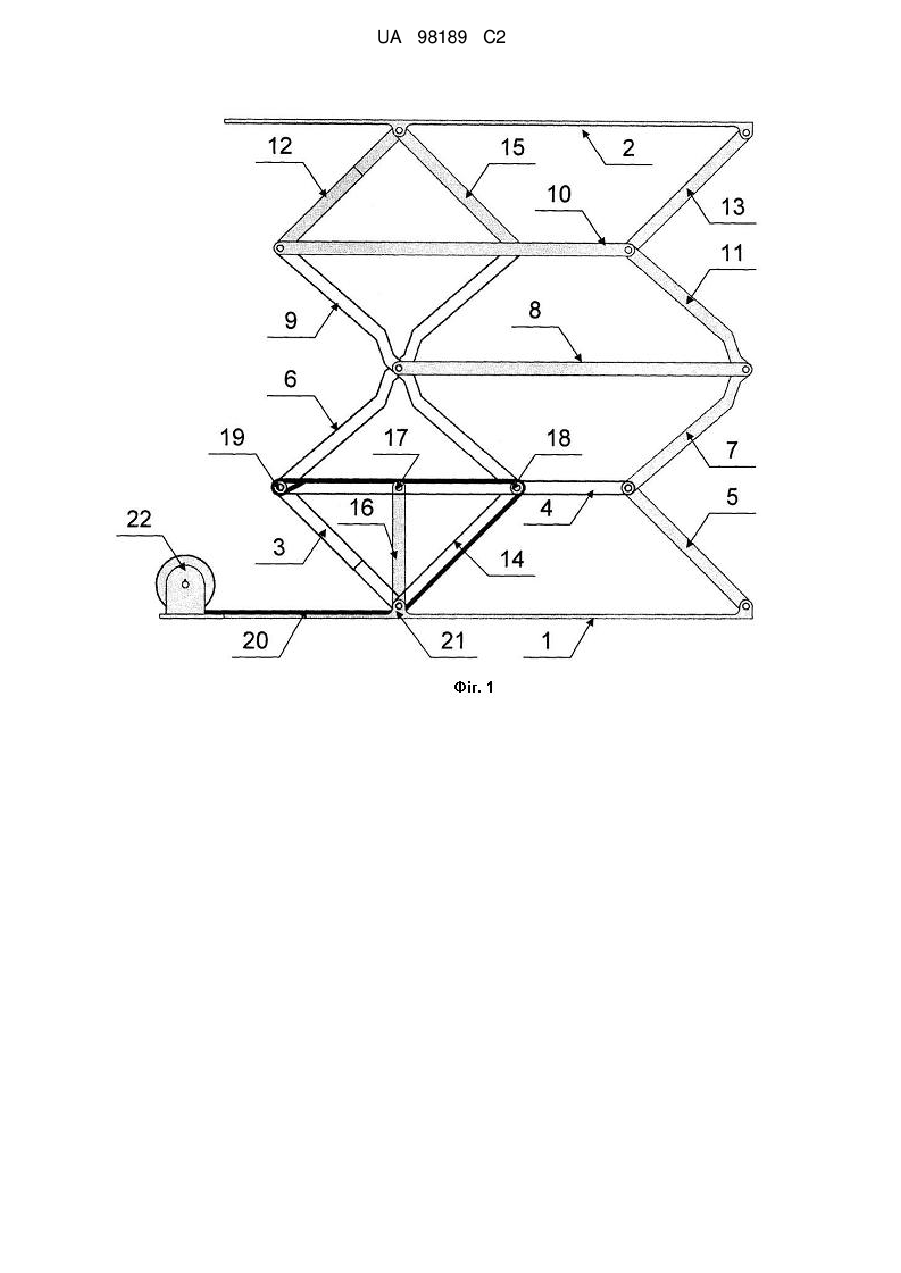
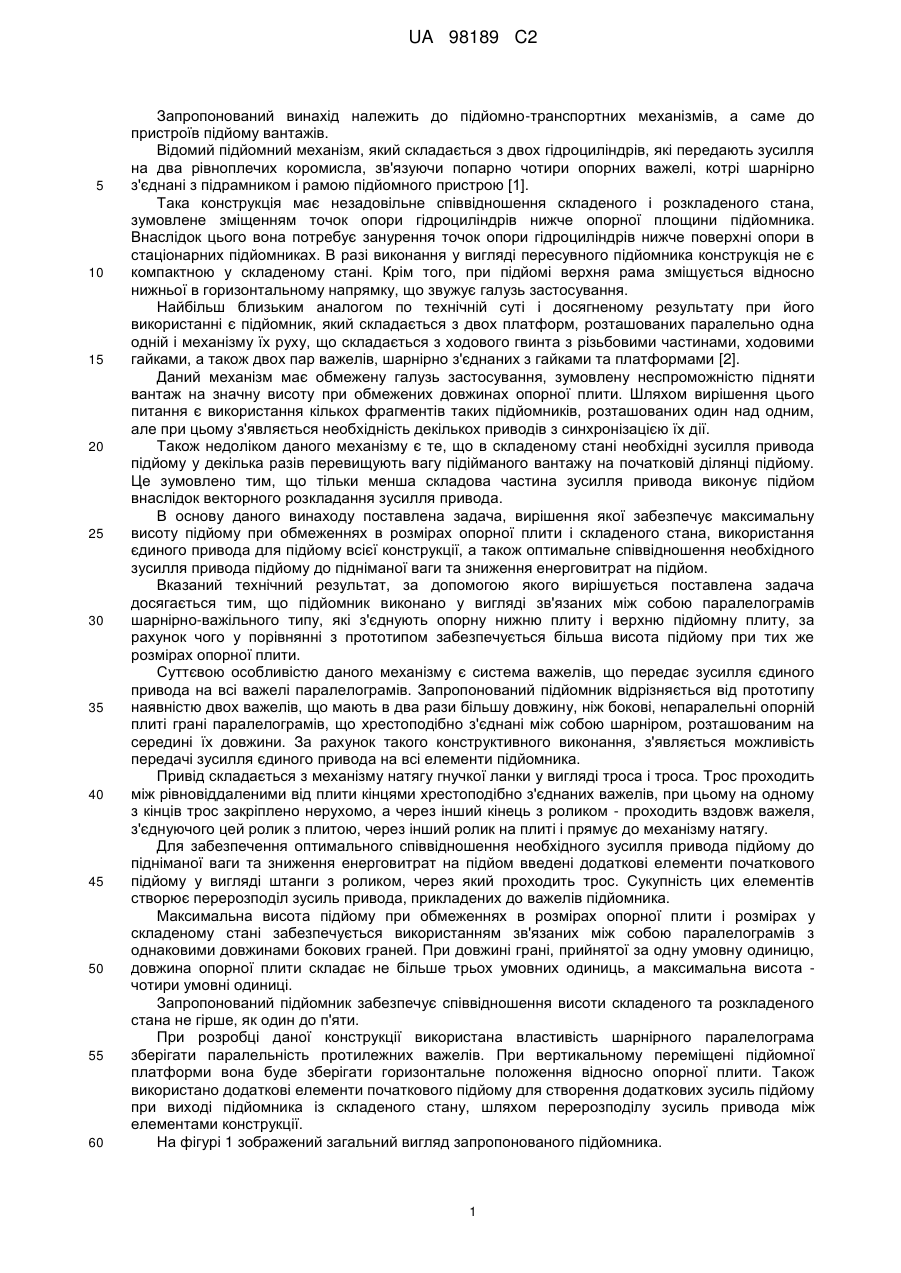
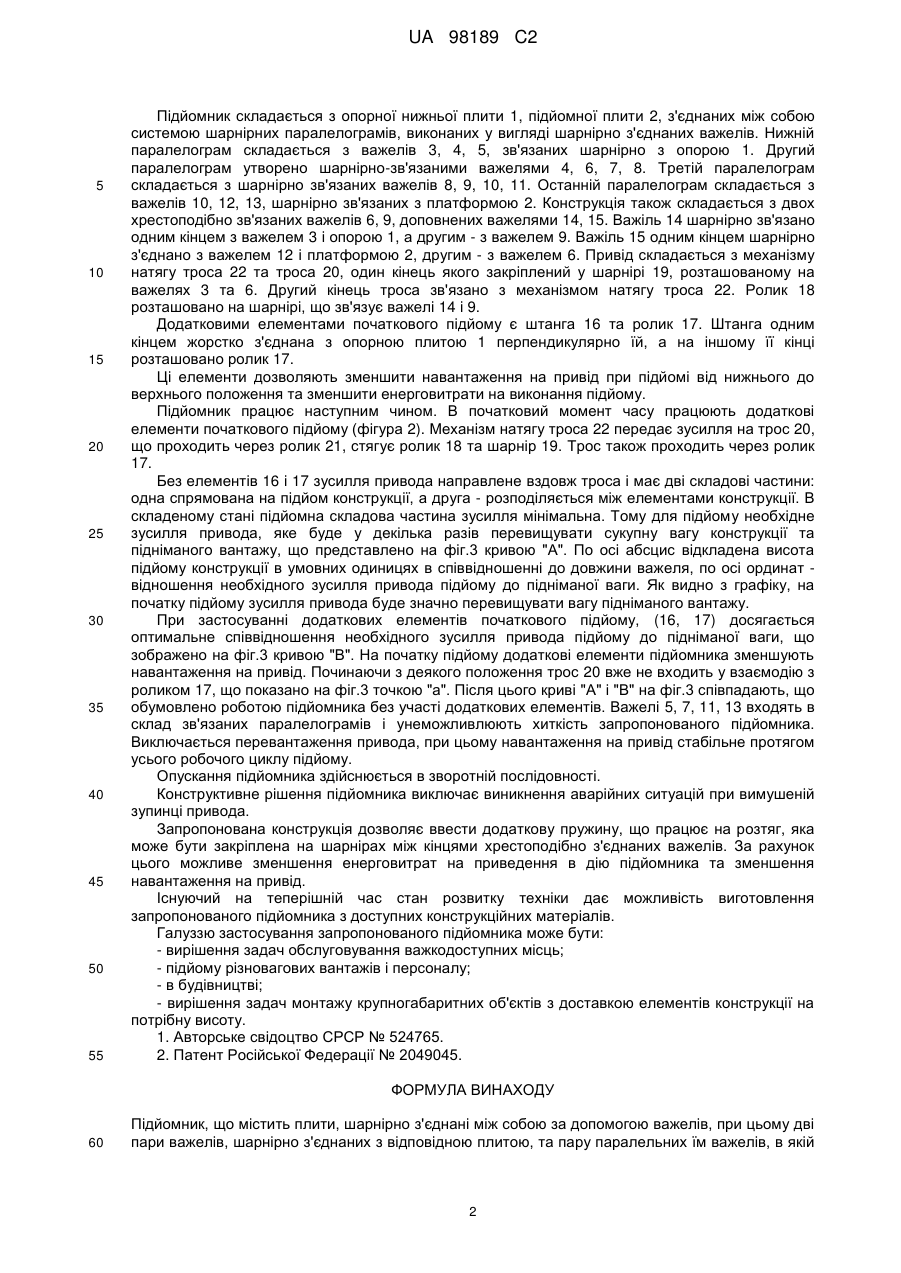
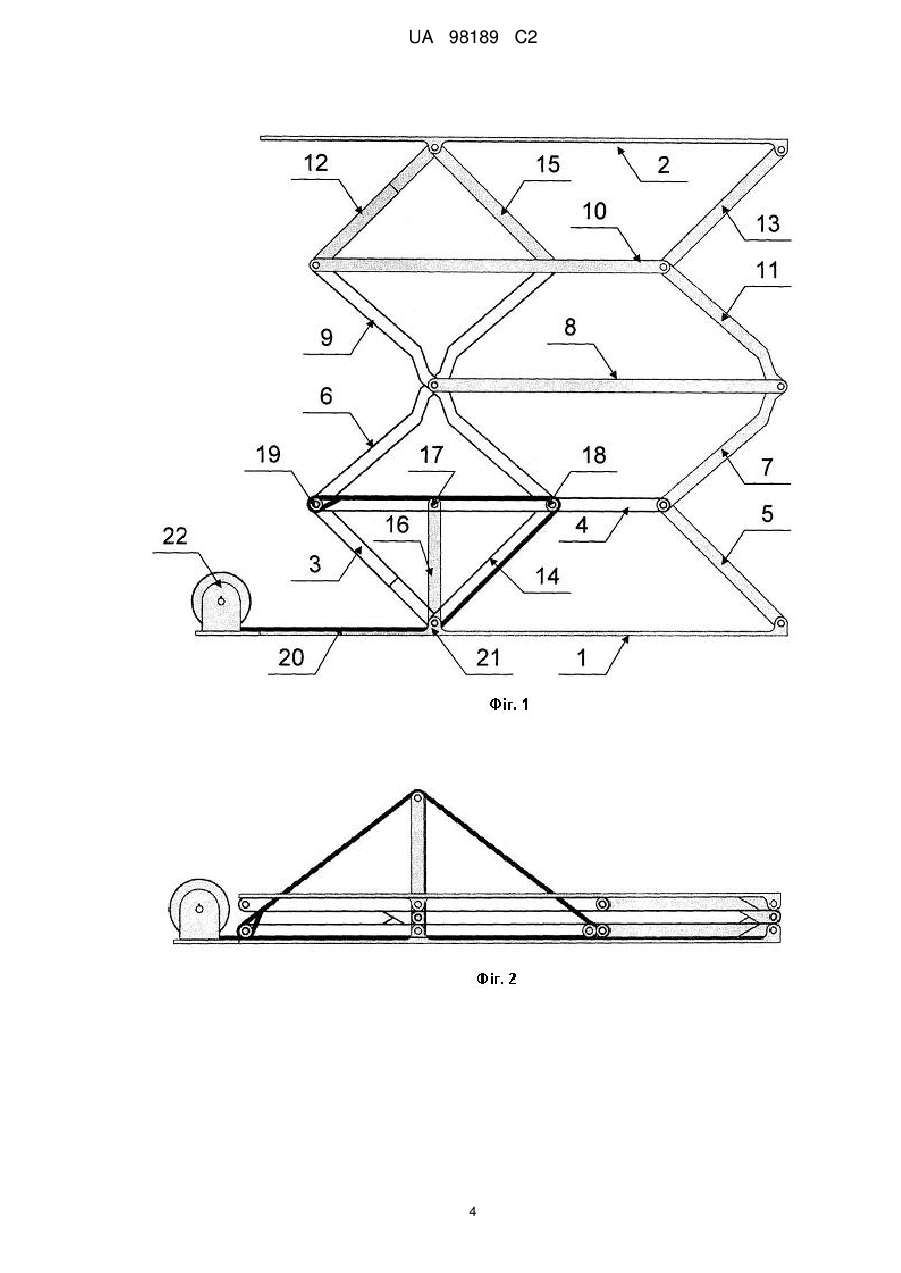
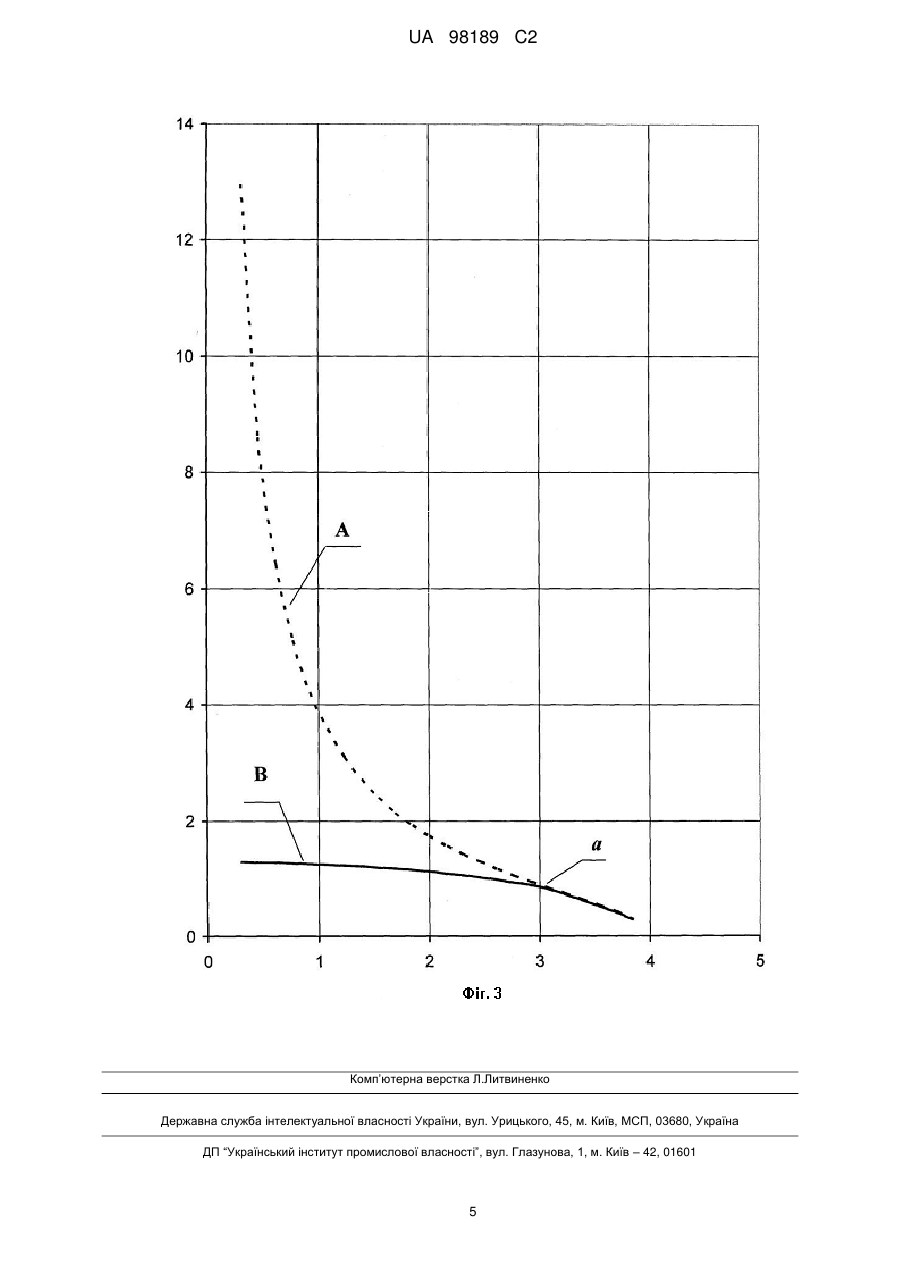
Реферат: Винахід належить до підйомно-транспортних механізмів, а саме до пристроїв підйому вантажів і може використовуватися для обслуговування важкодоступних місць, підйому різновагових вантажів і персоналу, в будівництві, вирішення задач монтажу великогабаритних об'єктів з доставкою елементів конструкції на потрібну висоту. Підйомник виконано у вигляді шарнірноважільного механізму паралелограмного типу. Для забезпечення оптимального співвідношення необхідного зусилля привода для підйому до підніманої ваги, та зниження енерговитрат на підйом введені додаткові елементи початкового підйому, у вигляді штанги з роликом, через який проходить трос. Привід підйомника складений з троса, що проходить через систему роликів та механізму його натягу. Особливістю даного механізму є система важелів, що передає зусилля єдиного привода на всі важелі паралелограмів. Винахід забезпечує максимальну висоту підйому при обмеженнях в розмірах опорної плити і складеного стана, використання єдиного привода для підйому всієї конструкції, а також оптимальне співвідношення необхідного зусилля привода для підйому до підніманої ваги та зниження енерговитрат на підйом. UA 98189 C2 (12) UA 98189 C2 UA 98189 C2 5 10 15 20 25 30 35 40 45 50 55 60 Запропонований винахід належить до підйомно-транспортних механізмів, а саме до пристроїв підйому вантажів. Відомий підйомний механізм, який складається з двох гідроциліндрів, які передають зусилля на два рівноплечих коромисла, зв'язуючи попарно чотири опорних важелі, котрі шарнірно з'єднані з підрамником і рамою підйомного пристрою [1]. Така конструкція має незадовільне співвідношення складеного і розкладеного стана, зумовлене зміщенням точок опори гідроциліндрів нижче опорної площини підйомника. Внаслідок цього вона потребує занурення точок опори гідроциліндрів нижче поверхні опори в стаціонарних підйомниках. В разі виконання у вигляді пересувного підйомника конструкція не є компактною у складеному стані. Крім того, при підйомі верхня рама зміщується відносно нижньої в горизонтальному напрямку, що звужує галузь застосування. Найбільш близьким аналогом по технічній суті і досягненому результату при його використанні є підйомник, який складається з двох платформ, розташованих паралельно одна одній і механізму їх руху, що складається з ходового гвинта з різьбовими частинами, ходовими гайками, а також двох пар важелів, шарнірно з'єднаних з гайками та платформами [2]. Даний механізм має обмежену галузь застосування, зумовлену неспроможністю підняти вантаж на значну висоту при обмежених довжинах опорної плити. Шляхом вирішення цього питання є використання кількох фрагментів таких підйомників, розташованих один над одним, але при цьому з'являється необхідність декількох приводів з синхронізацією їх дії. Також недоліком даного механізму є те, що в складеному стані необхідні зусилля привода підйому у декілька разів перевищують вагу підійманого вантажу на початковій ділянці підйому. Це зумовлено тим, що тільки менша складова частина зусилля привода виконує підйом внаслідок векторного розкладання зусилля привода. В основу даного винаходу поставлена задача, вирішення якої забезпечує максимальну висоту підйому при обмеженнях в розмірах опорної плити і складеного стана, використання єдиного привода для підйому всієї конструкції, а також оптимальне співвідношення необхідного зусилля привода підйому до підніманої ваги та зниження енерговитрат на підйом. Вказаний технічний результат, за допомогою якого вирішується поставлена задача досягається тим, що підйомник виконано у вигляді зв'язаних між собою паралелограмів шарнірно-важільного типу, які з'єднують опорну нижню плиту і верхню підйомну плиту, за рахунок чого у порівнянні з прототипом забезпечується більша висота підйому при тих же розмірах опорної плити. Суттєвою особливістю даного механізму є система важелів, що передає зусилля єдиного привода на всі важелі паралелограмів. Запропонований підйомник відрізняється від прототипу наявністю двох важелів, що мають в два рази більшу довжину, ніж бокові, непаралельні опорній плиті грані паралелограмів, що хрестоподібно з'єднані між собою шарніром, розташованим на середині їх довжини. За рахунок такого конструктивного виконання, з'являється можливість передачі зусилля єдиного привода на всі елементи підйомника. Привід складається з механізму натягу гнучкої ланки у вигляді троса і троса. Трос проходить між рівновіддаленими від плити кінцями хрестоподібно з'єднаних важелів, при цьому на одному з кінців трос закріплено нерухомо, а через інший кінець з роликом - проходить вздовж важеля, з'єднуючого цей ролик з плитою, через інший ролик на плиті і прямує до механізму натягу. Для забезпечення оптимального співвідношення необхідного зусилля привода підйому до підніманої ваги та зниження енерговитрат на підйом введені додаткові елементи початкового підйому у вигляді штанги з роликом, через який проходить трос. Сукупність цих елементів створює перерозподіл зусиль привода, прикладених до важелів підйомника. Максимальна висота підйому при обмеженнях в розмірах опорної плити і розмірах у складеному стані забезпечується використанням зв'язаних між собою паралелограмів з однаковими довжинами бокових граней. При довжині грані, прийнятої за одну умовну одиницю, довжина опорної плити складає не більше трьох умовних одиниць, а максимальна висота чотири умовні одиниці. Запропонований підйомник забезпечує співвідношення висоти складеного та розкладеного стана не гірше, як один до п'яти. При розробці даної конструкції використана властивість шарнірного паралелограма зберігати паралельність протилежних важелів. При вертикальному переміщені підйомної платформи вона буде зберігати горизонтальне положення відносно опорної плити. Також використано додаткові елементи початкового підйому для створення додаткових зусиль підйому при виході підйомника із складеного стану, шляхом перерозподілу зусиль привода між елементами конструкції. На фігурі 1 зображений загальний вигляд запропонованого підйомника. 1 UA 98189 C2 5 10 15 20 25 30 35 40 45 50 55 Підйомник складається з опорної нижньої плити 1, підйомної плити 2, з'єднаних між собою системою шарнірних паралелограмів, виконаних у вигляді шарнірно з'єднаних важелів. Нижній паралелограм складається з важелів 3, 4, 5, зв'язаних шарнірно з опорою 1. Другий паралелограм утворено шарнірно-зв'язаними важелями 4, 6, 7, 8. Третій паралелограм складається з шарнірно зв'язаних важелів 8, 9, 10, 11. Останній паралелограм складається з важелів 10, 12, 13, шарнірно зв'язаних з платформою 2. Конструкція також складається з двох хрестоподібно зв'язаних важелів 6, 9, доповнених важелями 14, 15. Важіль 14 шарнірно зв'язано одним кінцем з важелем 3 і опорою 1, а другим - з важелем 9. Важіль 15 одним кінцем шарнірно з'єднано з важелем 12 і платформою 2, другим - з важелем 6. Привід складається з механізму натягу троса 22 та троса 20, один кінець якого закріплений у шарнірі 19, розташованому на важелях 3 та 6. Другий кінець троса зв'язано з механізмом натягу троса 22. Ролик 18 розташовано на шарнірі, що зв'язує важелі 14 і 9. Додатковими елементами початкового підйому є штанга 16 та ролик 17. Штанга одним кінцем жорстко з'єднана з опорною плитою 1 перпендикулярно їй, а на іншому її кінці розташовано ролик 17. Ці елементи дозволяють зменшити навантаження на привід при підйомі від нижнього до верхнього положення та зменшити енерговитрати на виконання підйому. Підйомник працює наступним чином. В початковий момент часу працюють додаткові елементи початкового підйому (фігура 2). Механізм натягу троса 22 передає зусилля на трос 20, що проходить через ролик 21, стягує ролик 18 та шарнір 19. Трос також проходить через ролик 17. Без елементів 16 і 17 зусилля привода направлене вздовж троса і має дві складові частини: одна спрямована на підйом конструкції, а друга - розподіляється між елементами конструкції. В складеному стані підйомна складова частина зусилля мінімальна. Тому для підйому необхідне зусилля привода, яке буде у декілька разів перевищувати сукупну вагу конструкції та підніманого вантажу, що представлено на фіг.3 кривою "А". По осі абсцис відкладена висота підйому конструкції в умовних одиницях в співвідношенні до довжини важеля, по осі ординат відношення необхідного зусилля привода підйому до підніманої ваги. Як видно з графіку, на початку підйому зусилля привода буде значно перевищувати вагу підніманого вантажу. При застосуванні додаткових елементів початкового підйому, (16, 17) досягається оптимальне співвідношення необхідного зусилля привода підйому до підніманої ваги, що зображено на фіг.3 кривою "В". На початку підйому додаткові елементи підйомника зменшують навантаження на привід. Починаючи з деякого положення трос 20 вже не входить у взаємодію з роликом 17, що показано на фіг.3 точкою "а". Після цього криві "А" і "В" на фіг.3 співпадають, що обумовлено роботою підйомника без участі додаткових елементів. Важелі 5, 7, 11, 13 входять в склад зв'язаних паралелограмів і унеможливлюють хиткість запропонованого підйомника. Виключається перевантаження привода, при цьому навантаження на привід стабільне протягом усього робочого циклу підйому. Опускання підйомника здійснюється в зворотній послідовності. Конструктивне рішення підйомника виключає виникнення аварійних ситуацій при вимушеній зупинці привода. Запропонована конструкція дозволяє ввести додаткову пружину, що працює на розтяг, яка може бути закріплена на шарнірах між кінцями хрестоподібно з'єднаних важелів. За рахунок цього можливе зменшення енерговитрат на приведення в дію підйомника та зменшення навантаження на привід. Існуючий на теперішній час стан розвитку техніки дає можливість виготовлення запропонованого підйомника з доступних конструкційних матеріалів. Галуззю застосування запропонованого підйомника може бути: - вирішення задач обслуговування важкодоступних місць; - підйому різновагових вантажів і персоналу; - в будівництві; - вирішення задач монтажу крупногабаритних об'єктів з доставкою елементів конструкції на потрібну висоту. 1. Авторське свідоцтво СРСР № 524765. 2. Патент Російської Федерації № 2049045. ФОРМУЛА ВИНАХОДУ 60 Підйомник, що містить плити, шарнірно з'єднані між собою за допомогою важелів, при цьому дві пари важелів, шарнірно з'єднаних з відповідною плитою, та пару паралельних їм важелів, в якій 2 UA 98189 C2 5 10 15 20 кожний шарнірно одним кінцем прикріплений до відповідної плити, який відрізняється тим, що вищеназвані дві пари важелів кінцями, протилежними до кінців, поєднаних з плитою, шарнірно з'єднані з двома важелями довжиною у два рази більшою, ніж кожна з ланок вищеназваних пар, які хрестоподібно з'єднані між собою посередині за допомогою шарніра, до якого приєднаний додатковий важіль, розташований паралельно плитам, з довжиною, що дорівнює відстані між шарнірами кріплення до плит двох пар важелів та кожного з пари паралельних їм важелів, протилежний кінець якого шарнірно зв'язаний з двома додатковими важелями, протилежні кінці яких шарнірно з'єднані з парою важелів, що мають шарніри, розташовані на відповідних плитах на відстані від точки кріплення шарнірів до плит двох пар важелів, що дорівнює довжині додаткового важеля, паралельного плитам, крім цього, до цих протилежних кінців двох додаткових важелів приєднано ще два важелі з довжиною, що дорівнює довжині попереднього важеля, паралельного плитам, також паралельно плитам, при цьому ці два важелі з'єднані відповідно другим кінцем з шарнірами на кінцях хрестоподібно з'єднаних між собою двох важелів, також підйомник, обладнаний тросом та механізмом його натягу, при цьому трос розташований між рівновіддаленими від плити кінцями хрестоподібно з'єднаних важелів, на одному з цих кінців трос закріплений нерухомо, а через інший кінець з роликом трос направлений вздовж важеля, з'єднуючого цей ролик з плитою, і через інший ролик на плиті, трос спрямований до механізму натягу, підйомник також має в своєму складі штангу з роликом, яка протилежним від цього ролика кінцем консольно та жорстко закріплена на плиті перпендикулярно їй в точці сходження двох пар важелів з плитою, при цьому на початку підйому, трос спрямований від точки його закріплення через ролик на штанзі до механізму натягу троса. 3 UA 98189 C2 4 UA 98189 C2 Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюElevator
Автори англійськоюFedorenko SerhiI Volodymyrovych, Mischenko Oleksandr Ivanovych, Reutova Anastasia Mykolaivna, Malakhov Oleksii Oleksandrovych
Назва патенту російськоюПодъемник
Автори російськоюФедоренко Сергей Владимирович, Мищенко Александр Иванович, Реутова Анастасия Николаевна, Малахов Алексей Александрович
МПК / Мітки
МПК: B66F 3/00
Мітки: підйомник
Код посилання
<a href="https://ua.patents.su/7-98189-pidjjomnik.html" target="_blank" rel="follow" title="База патентів України">Підйомник</a>
Пересувний підйомник
Номер патенту: 64758
Опубліковано: 15.03.2004
Автор: Кателевський Микола Прокопович
МПК: B60P 1/02, B66B 9/16, B66F 3/00
Мітки: пересувний, підйомник
Формула / Реферат:
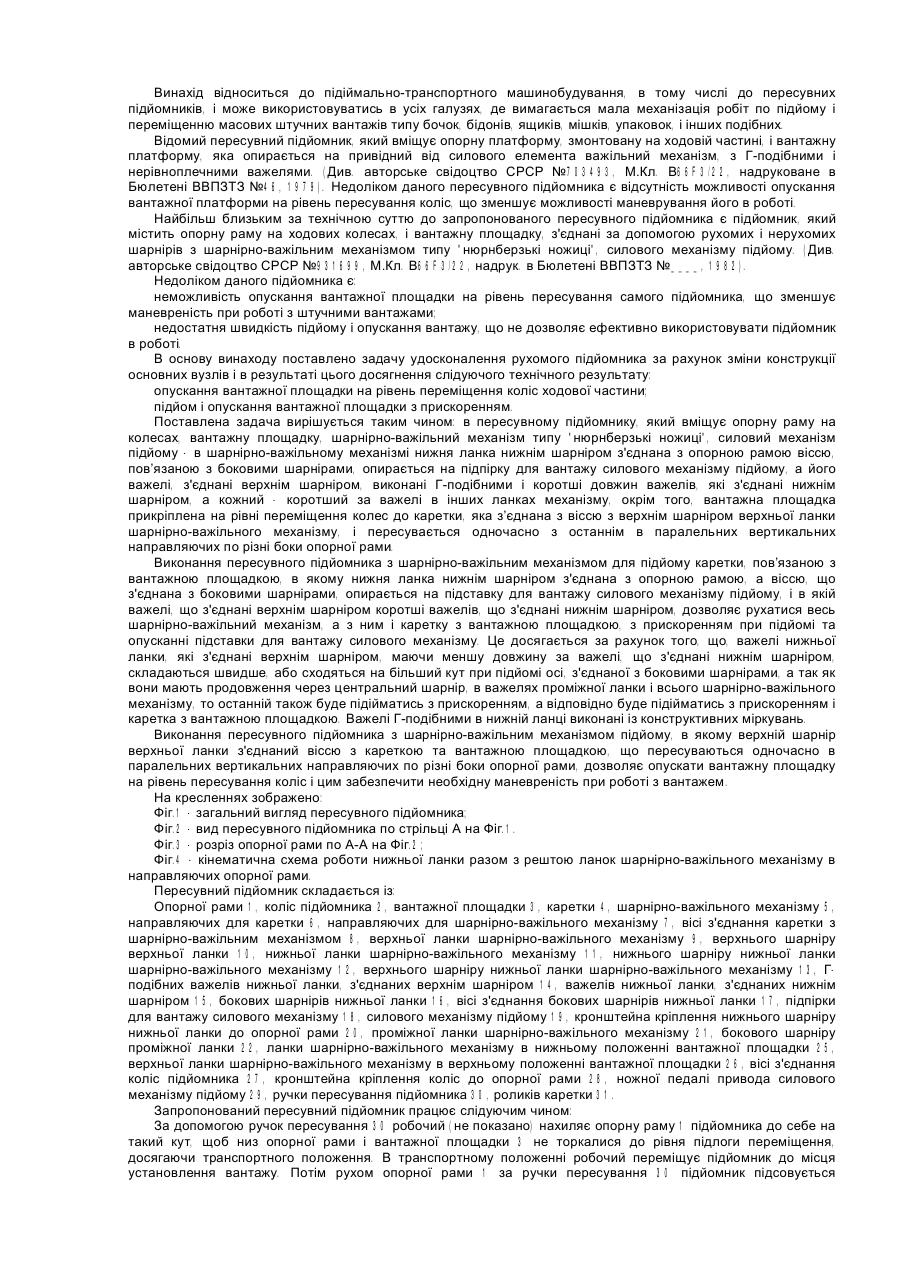
1. Пересувний підйомник, який містить опорну раму на колесах, вантажну площадку, шарнірно-важільний механізм типу "нюрнберзькі ножиці", силовий механізм підйому, який відрізняється тим, що в шарнірно-важільному механізмі нижня ланка нижнім шарніром з'єднана з опорною рамою, бокові шарніри нижньої ланки з’єднані віссю, яка опирається на підпірку для вантажу силового механізму підйому, а довжини важелів нижньої ланки, які з'єднані...
Підйомник
Номер патенту: 93771
Опубліковано: 10.03.2011
Автори: Жулінський Євгеній Миколайович, Федоренко Сергій Володимирович, Міщенко Олександр Іванович
Мітки: підйомник
Формула / Реферат:
Підйомник, що має основу та першу підйомну платформу, шарнірно з'єднані між собою за допомогою пар важелів, та гідроциліндр, зв'язаний з основою, який відрізняється тим, що його підйомна частина виконана у вигляді шарнірного паралелограма, що має два різновисотні шарніри у середній частині паралелограма з опорою на опорні колони, крім того підйомник має другу підйомну платформу, розташовану симетрично першій відносно точок опори шарнірного...
Пасажирський підйомник
Номер патенту: 3746
Опубліковано: 15.12.2004
Автори: Гребнєв Андрій Анатолійович, Туник Віктор Володимирович, Ялинич Євген Олексійович, Богун Віктор Петрович
Мітки: підйомник, пасажирський
Формула / Реферат:
Пасажирський підйомник, що містить вантажну платформу, установлену на напрямних, виконаних у вигляді двох рознесених по висоті рейок, і пристрій для переміщення вантажної платформи, що включає розташований на верхній площадці привід і трос, який з'єднує привід з вантажною платформою, який відрізняється тим, що він оснащений напрямними блоками, закріпленими на верхніх торцях напрямних, а привід виконаний у вигляді привідного барабана, при...
Будівельний підйомник
Номер патенту: 30527
Опубліковано: 15.11.2000
Автор: Коваль Віталій Іванович
МПК: B66B 9/16
Мітки: будівельний, підйомник
Формула / Реферат:
Будівельний підйомник, який має щоглу, каретку з приводом її переміщення вздовж щогли, вантажну платформу, установлену на каретці з можливістю її переміщення поперек щогли, який відрізняється тим, що на каретці установлені на одній геометричній осі блок каната підйому каретки іфрикційний барабан, охоплений канатом приводу горизонтального переміщення платформи, кінці якого закріплені на кронштейнах, розміщених на краях платформи, а між валами...
Будівельний підйомник
Номер патенту: 61633
Опубліковано: 25.07.2011
Автор: Коваль Віталій Іванович
МПК: B66B 9/00
Мітки: будівельний, підйомник
Формула / Реферат:
Будівельний підйомник, що містить щоглу, каретку з приводом її переміщення вздовж щогли, розміщену на каретці вантажну платформу з можливістю її переміщення поперек щогли, який відрізняється тим, що на каретці на одному валу з барабаном механізму висування платформи встановлено зубчасте колесо, яке знаходиться в зачепленні з вертикальною зубчастою рейкою до кінців якої приєднаний канат, який охоплює два блоки, розміщені відповідно на вершині...
Попередній патент: Спосіб з’єднання біметалевого блока для термоізоляції елементів мікроелектроніки
Наступний патент: Спосіб стикування фундаменту з трубобетонною колоною
Випадковий патент: Спосіб кислотної обробки привибійної зони пласта