Крокуюча платформа
Номер патенту: 98347
Опубліковано: 10.05.2012
Автори: Бочаров Володимир Іванович, Алісейчик Олександр Олександрович, Попов Олександр Васильович, Берхін Йосип Мойсейович
Формула / Реферат
1. Крокуюча платформа, яка має робочу і допоміжну платформи, змонтовані у спосіб, що дає можливість поступально-поворотного переміщення одна щодо одної за допомогою механізмів для їх переміщення і рухомих опор, яка відрізняється тим, що допоміжна платформа розташована під робочою платформою, а між ними змонтовано повзун, який має механізм поступального переміщення, причому повзун з'єднано з робочою платформою за допомогою поворотного з'єднання і механічно зв'язано з допоміжною платформою за допомогою зачепів.
2. Крокуюча платформа за п. 1, яка відрізняється тим, що поворотне з'єднання повзуна з робочою платформою виконано у вигляді опорно-поворотного підшипника і має механізм поворотного переміщення.
Текст
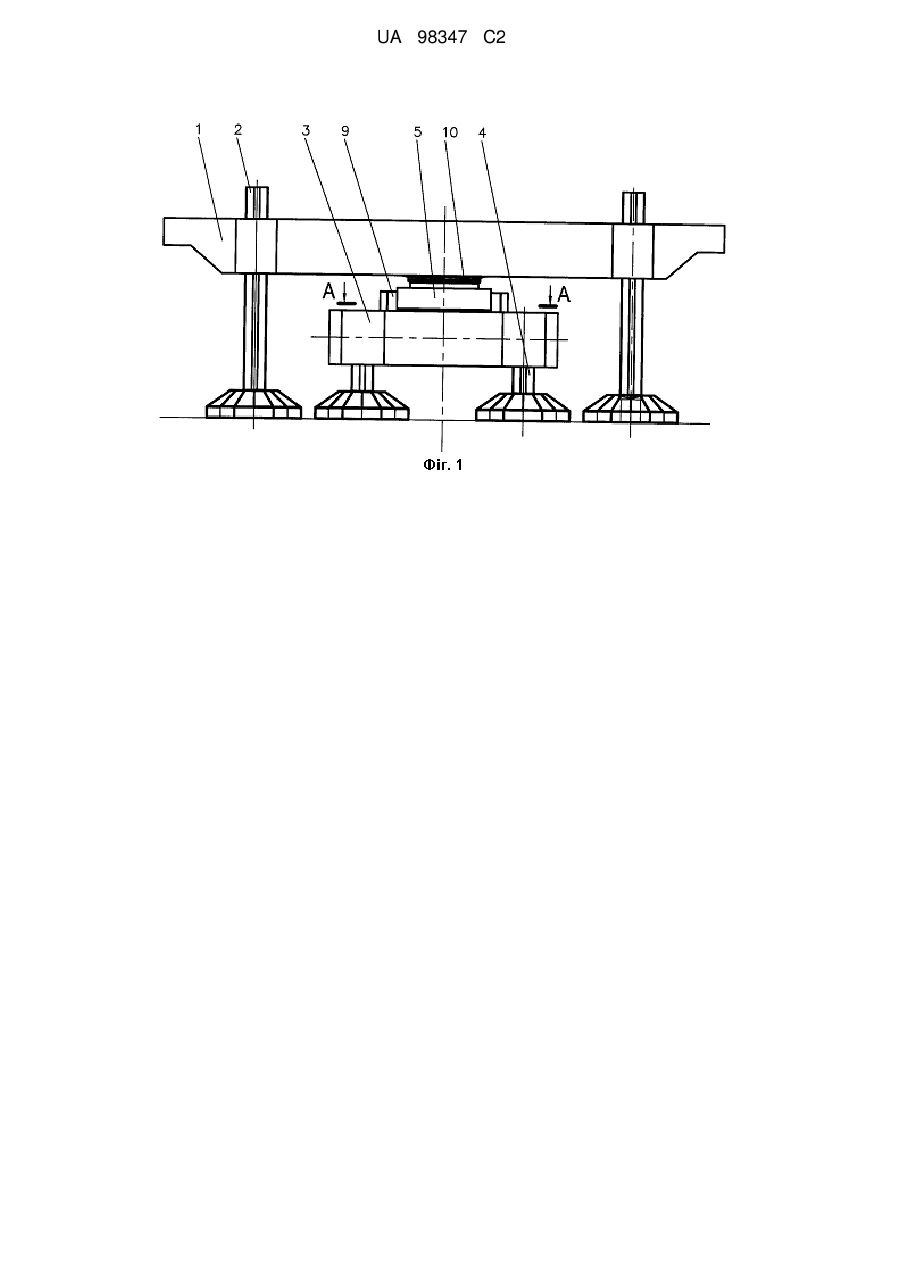
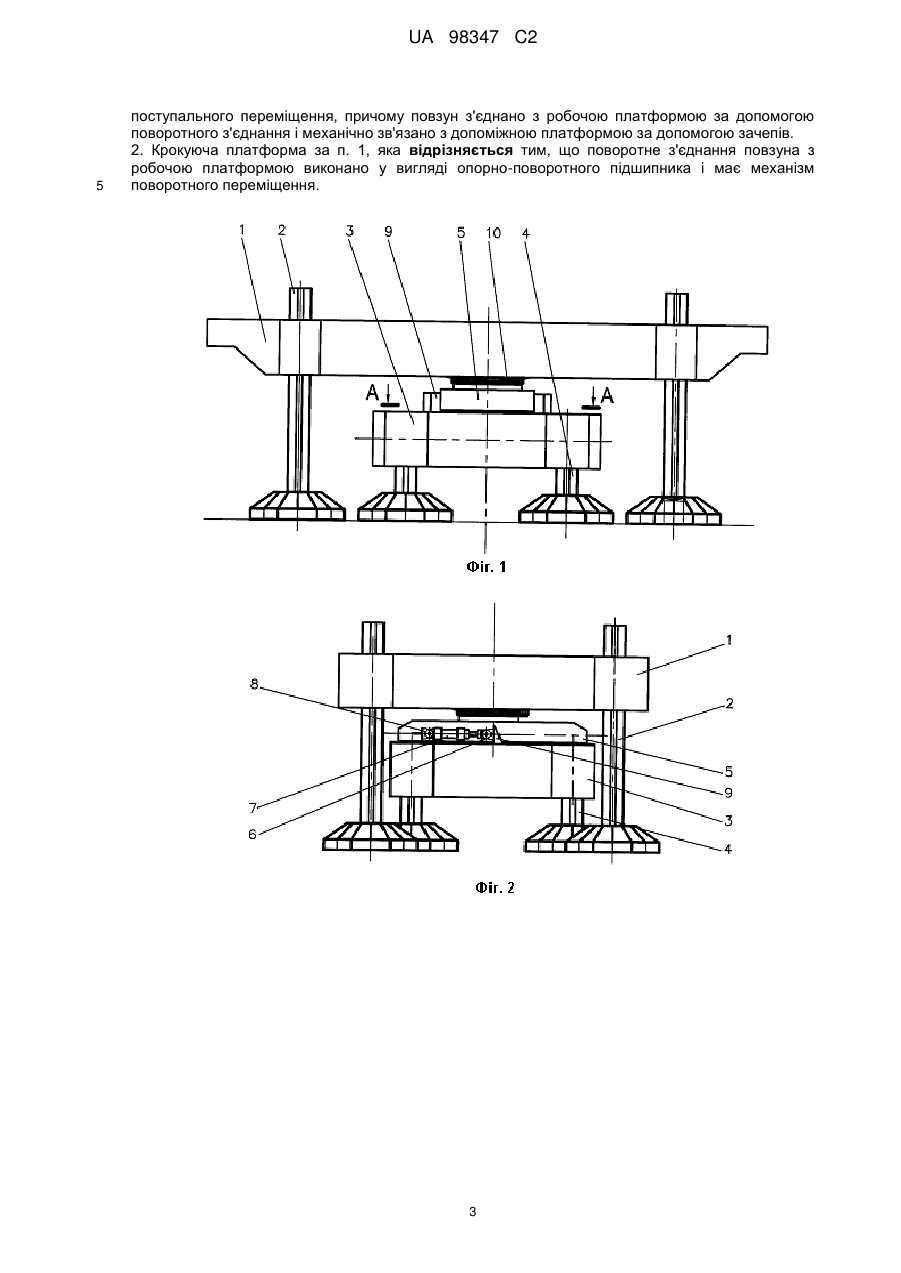
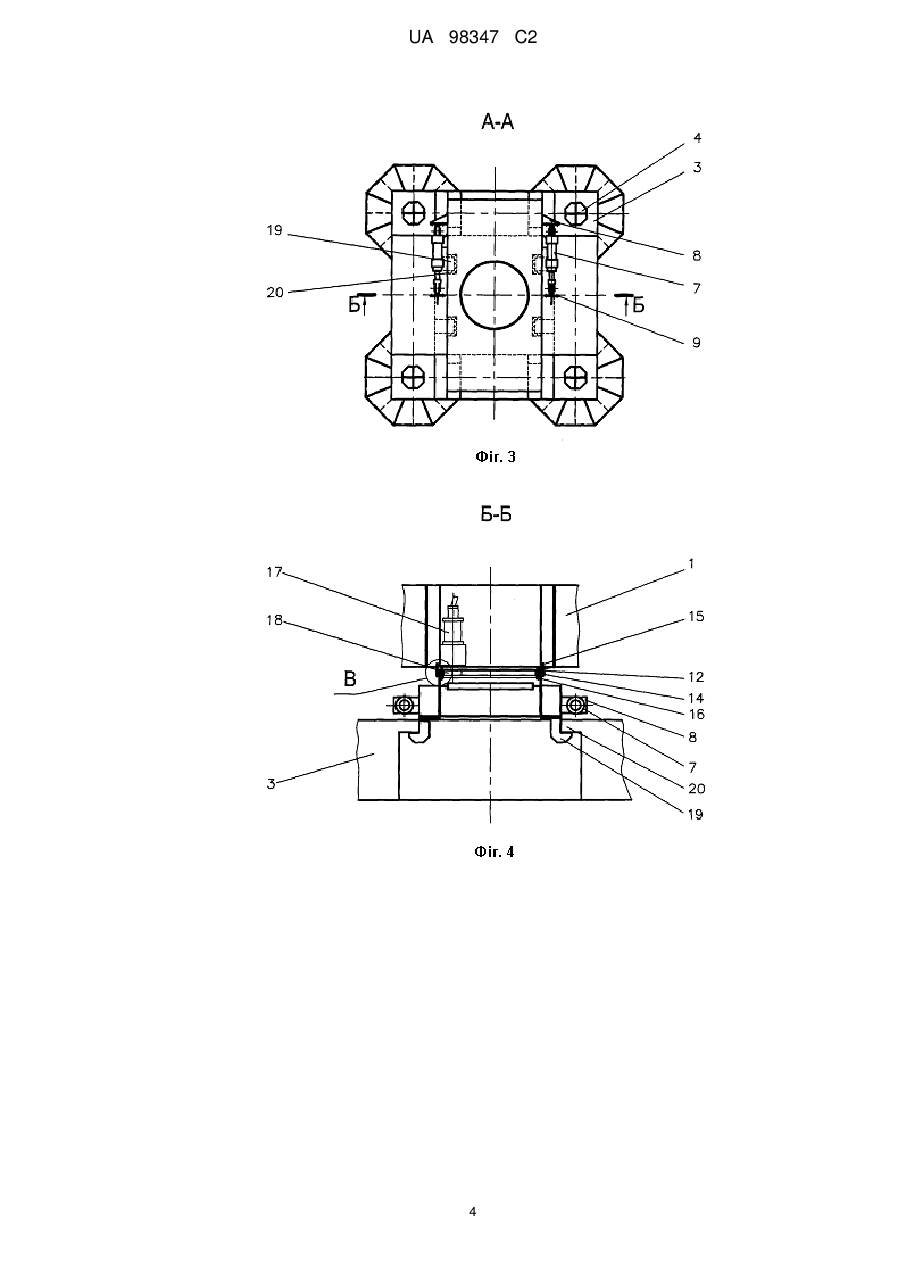
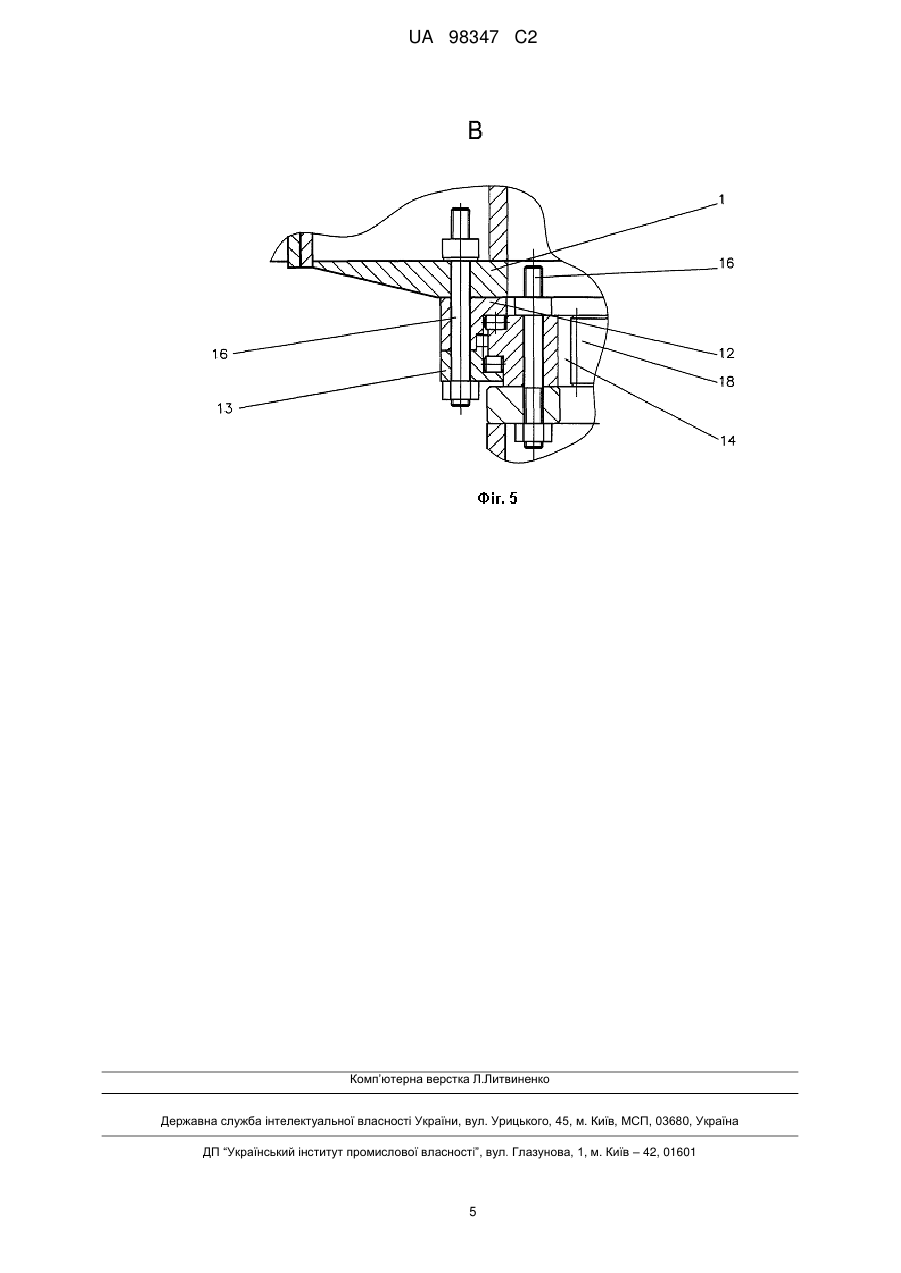
Реферат: Крокуюча платформа призначена для освоєння мілководного континентального шельфу, і може використовуватися для транспортування та монтажу великовагових конструкцій при будівництві. Технічним результатом є спрощення конструкції крокуючої платформи і зниження її металоємності та енерговитрат при зміні напрямків руху. Новим є те, що допоміжна платформа розташована під робочою платформою, а поміж ними змонтовано повзун, який має механізм поступального переміщення, причому повзун з'єднано з робочою платформою за допомогою поворотного з'єднання і механічно зв'язано з допоміжною платформою за допомогою зачепів. UA 98347 C2 (12) UA 98347 C2 UA 98347 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до галузі гідротехнічних споруд, а саме до конструкцій морських платформ для освоєння мілководного континентального шельфу, і може бути застосований для транспортування та монтажу великовагових конструкцій при будівництві. Існує відома конструкція крокуючої платформи [Walking platform construction], яка включає рухому платформу з багатьма рухомими опорами у вертикальному напрямку відносно платформи (див. Патент США № 4,288,177 від 1981 р.). Недоліком вказаної відомої конструкції крокуючої платформи є обмежена кількість пересувних опор (8 опор), внаслідок чого платформа придатна для застосування тільки на щільних ґрунтах. Крім того, оснащення прямокутними допоміжними пристроями не дозволяє здійснювати однакові за довжиною переміщення платформи у поздовжньому та поперечному напрямках та її обертання навколо вертикальної осі. Відома крокуюча платформа, що містить робочу та допоміжну платформи, змонтовані з можливістю поступово - поворотного пересування одна щодо одної за допомогою механізмів 8 для їх пересування та рухомих опор, (див. патент на корисну модель України № 38578, МПК В 60 Р 3/00 от 2008 р. - прототип). Недолік прототипу полягає в тому, що робоча платформа виконана складеною з двох верхньої та нижньої частин, рознесених між собою по височині. Таким чином, всередині робочої платформи утворюється простір, в якому розміщується допоміжна платформа. Це ускладнює конструкцію всієї платформи через те, що в нижній частині робочої платформи (на її найбільш навантаженій середній ділянці) необхідно виконати прорізи для забезпечення переміщень у горизонтальному напрямку рухомих опор допоміжної платформи. Розміри і конфігурація цих прорізів мають забезпечувати під час пересування (крокування) платформи взаємне переміщення робочої та допоміжної платформ одна відносно одної як у прямолінійному (поздовжньому та поперечному) напрямку, так і під час поворотів всієї платформи. Кількість таких прорізів обумовлена кількістю рухомих опор допоміжної платформи. Внаслідок влаштування прорізів нижня частина робочої платформи стає послабленою в самому навантаженому місці. Для компенсації послаблення нижньої частини робочої платформи потребується збільшення розмірів її поперечних перерізів, що призведе до збільшення висотних габаритів всієї платформи та зростанню її металоємності. Недоліком конструкції прототипу є також те, що платформа має обмежений розмірами прорізів кут повороту при здійсненні кожного кроку, внаслідок чого траєкторія повороту платформи матиме достатньо великий радіус при зміні напрямку руху. За рахунок цього збільшуються енерговитрати на здійснення змін напрямків руху. В основу винаходу поставлена задача створення такої конструкції платформи, що забезпечує спрощення її конструкції та зниження металоємності, а також зменшення енерговитрат при зміні напрямків руху. Поставлена задача вирішується у крокуючій платформі, яка має робочу та допоміжну платформи, змонтовані з можливістю поступально-поворотного переміщування одна щодо одної за допомогою механізмів для їх переміщення і рухомих опор, завдяки тому, що допоміжна платформа розміщена під робочою платформою, а між ними змонтовано повзун, який має механізм поступального переміщення, при цьому повзун з'єднано з робочою платформою за допомогою поворотного з'єднання і механічно зв'язано з допоміжною платформою за допомогою зачепів. Поставлена задача вирішується у крокуючій платформі також завдяки тому, що поворотне з'єднання повзуна з робочою платформою виконано у вигляді опорно-поворотного підшипника і має механізм поворотного переміщення. Причинно-наслідковий зв'язок між сукупністю суттєвих ознак винаходу, що заявляється, і технічним результатом, що досягається, полягає у спрощенні конструкції платформи та зниженні її металоємності, а також у зменшенні енерговитрат при зміні напрямків руху. Наявність в конструкції платформи повзуна з поворотним з'єднанням у вигляді роликової опори забезпечує рух платформи з будь-яким необхідним кутом повороту, за рахунок цього при пересуванні крокуючої платформи зменшуються енерговитрати на виконання кроків її переміщення відповідно до змін напрямків руху. Крім того, розміщення допоміжної платформи з рухомими опорами під робочою платформою суттєво спрощує конструкцію крокуючої платформи, а це у свою чергу призводить до зменшення її металоємності. На фігурі 1 показана крокуюча платформа, що заявляється, вид збоку: на фіг. 2 теж саме. вид спереду; на фіг. 3 - розріз А-А фіг. 1; на фіг. 4 - розріз Б-Б фіг. 3; 1 UA 98347 C2 5 10 15 20 25 30 35 40 45 50 на фіг. 5 - вузол В фіг. 4. Крокуюча платформа, що заявляється, складається з робочої платформи 1 з рухомими опорами 2 та допоміжної платформи 3 з рухомими опорами 4. Допоміжна платформа 3 з рухомими опорами 4 розміщується під робочою платформою 1, а поміж ними розташовано повзун 5, який має механізм поступального переміщення 6, виконаний у вигляді гідроциліндрів 7. На повзуні 5 встановлено кронштейни 8, а на допоміжній платформі 3 - кронштейни 9. Повзун 5 з'єднано з робочою платформою 1 за допомогою поворотного з'єднання 10, яке виконано у вигляді опорно-поворотного підшипника, наприклад, роликова опора 11 зі змонтованими з можливістю обертання один щодо одного, верхнім кільцем 12 і нижнім кільцем 13 з зубцями 14 і шпильками 15 та 16. Верхнє кільце 12 шпильками 15 (жорстко) з'єднано з робочою платформою 1, нижнє кільце 13 шпильками 16 (жорстко) з'єднано з повзуном 5. Механізм повороту 17 встановлено на робочій платформі 1, і його шестірня 18 взаємодіє через зубці 14 з нижнім кільцем 13 роликової опори 11. Разом з цим повзун 5 має зачепи 19, які взаємодіють з затискачами 20, що змонтовані на допоміжній платформі 3. Пересування крокуючої платформи, що заявляється, і зміна напрямків її руху здійснюються наступним чином. Рухомі опори 2 робочої платформи 1 опускають вниз на ґрунт доти, доки зачепи 19 не стануть взаємодіяти з затискачами 20, і допоміжна платформа 3 разом з рухомими опорами 4 не підійметься, а її рухомі опори 4 не відірвуться від ґрунту. При цьому між повзуном 5 і допоміжною платформою 3 утворюється проміжок. Якщо крокуючу платформу потрібно перемістити у поздовжньому напрямку, то переміщують допоміжну платформу 3 разом з рухомими опорами 4 за допомогою гідроциліндрів 7, які упираючись в кронштейни 8 на повзуні 5, штовхають її рухомими опорами 4 через змонтовані на неї кронштейни 9 на потрібну відстань. В результаті допоміжна платформа 3 разом з рухомими опорами 4 переміщується сковзаючи затискачами 20 по зачепах 19. Внаслідок цього руху, оскільки повзун 5 через роликову опору 11 зі шпильками 15 та 16 є з'єднаний з робочою платформою 1, допоміжна платформа 3 разом з рухомими опорами 4 переміщується відносно робочої платформи 1. По закінченні переміщення допоміжної платформи 3 її рухомі опори 4 опускають до упирання в ґрунт і скорочення проміжку між повзуном 5 і допоміжною платформою 3. При подальшому підйомі допоміжної платформи 3 на опорах 4 через повзун 5 піднімається робоча платформа 1, і її рухомі опори 2 відриваються від ґрунту. Якщо в цьому положенні ввести в дію гідроциліндри 7, то забезпечується поздовжнє переміщення робочої платформи 1 відносно допоміжної платформи 3. Якщо в цьому положенні ввести в дію спочатку механізм повороту 17 і повернути робочу платформу 1 на роликовій опорі 11 на будь-який потрібний кут, а потім ввести в дію гідроциліндри 7, то при повороті на кут 90° забезпечується зміна поздовжнього руху платформи на поперечний. При повороті на кут менше 90° забезпечується зміна поздовжнього переміщення крокуючої платформи на переміщення з поворотом. На цьому закінчується крок переміщення крокуючої платформи. По закінченні кроку для його повторення опускають рухомі опори 4 допоміжної платформи 3 до упирання в ґрунт і повторюють операції підйому допоміжної платформи 3 та викладені вище операції. Таким чином, в заявленій конструкції крокуючої платформи завдяки введенню в її конструкцію повзуна з поворотним з'єднанням, у вигляді роликової опори 11, забезпечується зміна руху платформи з будь-яким потрібним кутом повороту. За рахунок цього під час пересування крокуючої платформи зменшуються енерговитрати на здійснення кроків її переміщення зі зміною напрямку руху. Крім того, спрощується конструкція робочої платформи 1, тому що в ній скасовано пази та вирізи для рухомих опор 4 допоміжної платформи 3. За рахунок цього знижується металоємність крокуючої платформи. ФОРМУЛА ВИНАХОДУ 55 1. Крокуюча платформа, яка має робочу і допоміжну платформи, змонтовані у спосіб, що дає можливість поступально-поворотного переміщення одна щодо одної за допомогою механізмів для їх переміщення і рухомих опор, яка відрізняється тим, що допоміжна платформа розташована під робочою платформою, а між ними змонтовано повзун, який має механізм 2 UA 98347 C2 5 поступального переміщення, причому повзун з'єднано з робочою платформою за допомогою поворотного з'єднання і механічно зв'язано з допоміжною платформою за допомогою зачепів. 2. Крокуюча платформа за п. 1, яка відрізняється тим, що поворотне з'єднання повзуна з робочою платформою виконано у вигляді опорно-поворотного підшипника і має механізм поворотного переміщення. 3 UA 98347 C2 4 UA 98347 C2 Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюWalking platform
Автори англійськоюAliseichyk Oleksandr Oleksandrovych, Berkhin Yosyp Moiseiovych, Popov Oleksandr Vasyliovych, Bocharov Volodymyr Ivanovych
Назва патенту російськоюШагающая платформа
Автори російськоюАлисейчик Александр Александрович, Берхин Иосиф Моисеевич, Попов Александр Васильевич, Бочаров Владимир Иванович
МПК / Мітки
МПК: E02B 17/02
Код посилання
<a href="https://ua.patents.su/7-98347-krokuyucha-platforma.html" target="_blank" rel="follow" title="База патентів України">Крокуюча платформа</a>
Крокуюча платформа “жук” для переміщення великотоннажних та великогабаритних вантажів
Номер патенту: 38578
Опубліковано: 12.01.2009
Автор: Фельдман Борис Мордухович
Мітки: великогабаритних, великотоннажних, вантажів, переміщення, платформа, крокуюча, жук
Формула / Реферат:
Крокуюча платформа для переміщення великотоннажних та великогабаритних вантажів, що містить рухому платформу з множинністю рухомих опор у вертикальному напрямку відносно платформи, яка відрізняється тим, що платформа виконана як двоярусна, поділена на робочу та допоміжну платформи, рівномірно пересувні у повздовжньому та поперечному напрямках та обертальні навколо вертикальної осі одна відносно одної, з кількістю рухомих опор - не менше ніж...
Платформа атракціону
Номер патенту: 9129
Опубліковано: 15.09.2005
Автор: Столяренко Едуард Михайлович
МПК: A63G 1/00
Мітки: атракціону, платформа
Формула / Реферат:
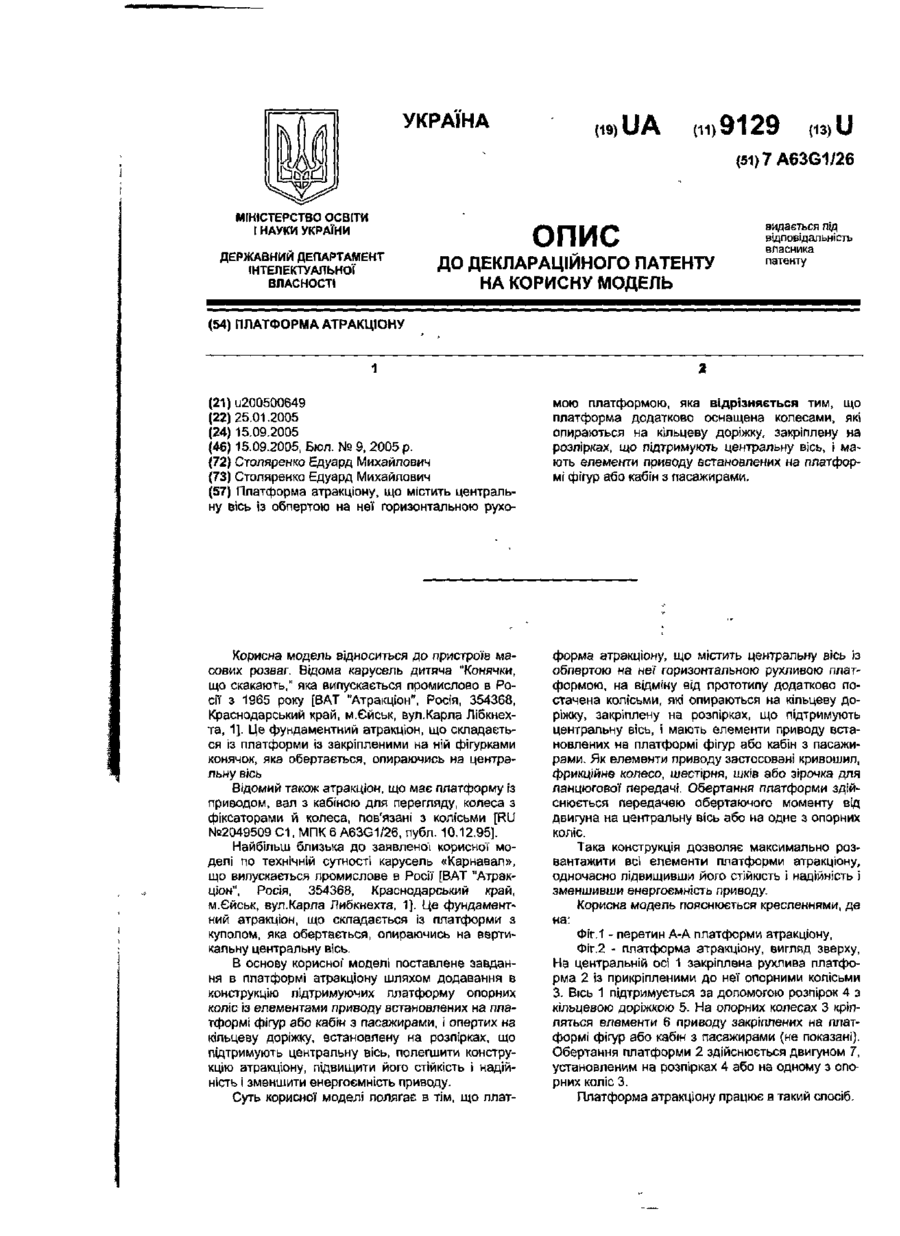
Платформа атракціону, що містить центральну вісь із обпертою на неї горизонтальною рухомою платформою, яка відрізняється тим, що платформа додатково оснащена колесами, які опираються на кільцеву доріжку, закріплену на розпірках, що підтримують центральну вісь, і мають елементи приводу встановлених на платформі фігур або кабін з пасажирами.
Багатоярусна універсальна обертальна платформа
Номер патенту: 36047
Опубліковано: 10.10.2008
Автор: Калітінов Віктор Вікторович
Мітки: багатоярусна, універсальна, платформа, обертальна
Формула / Реферат:
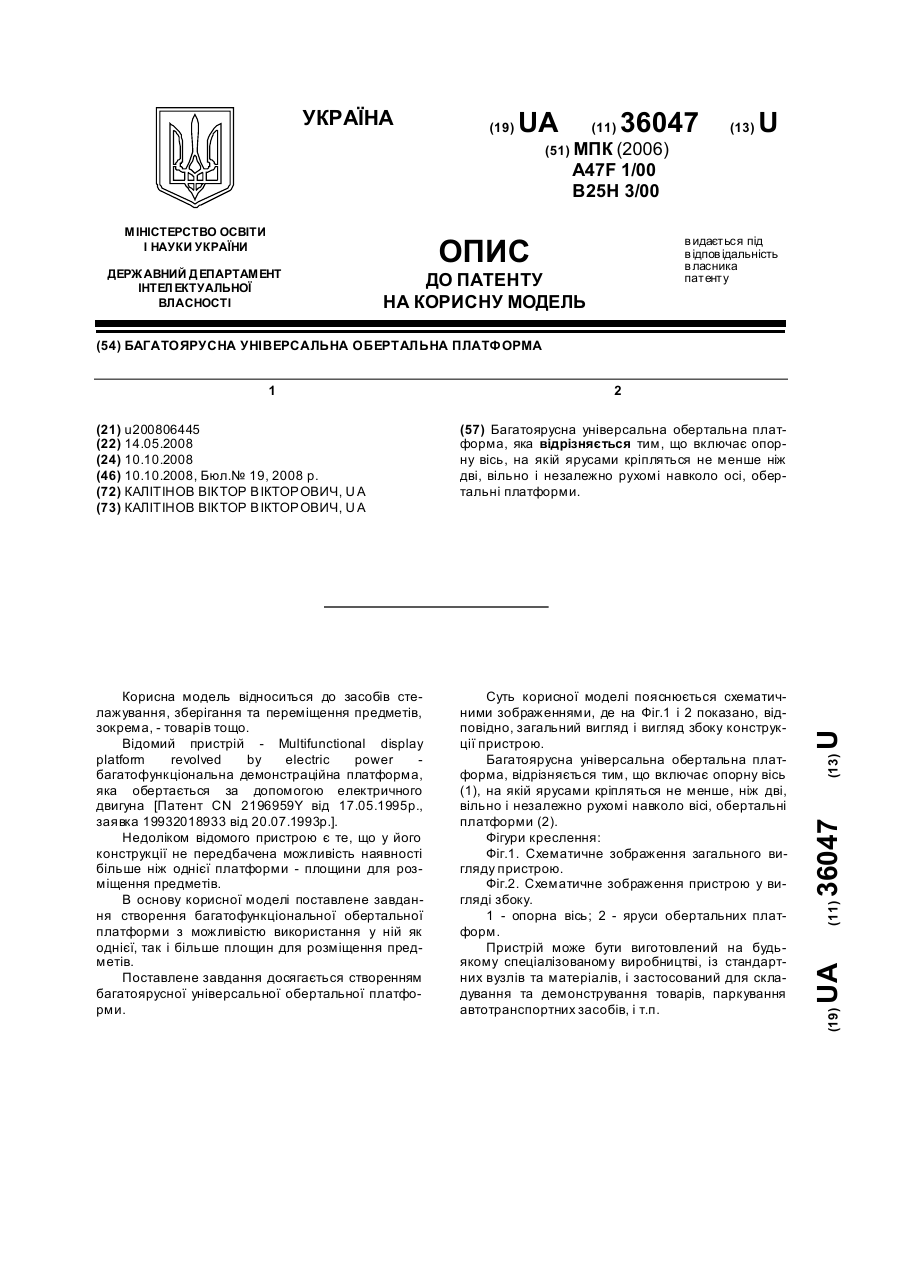
Багатоярусна універсальна обертальна платформа, яка відрізняється тим, що включає опорну вісь, на якій ярусами кріпляться не менше ніж дві, вільно і незалежно рухомі навколо осі, обертальні платформи.
Дорога монорейкова крокуюча

Номер патенту: 52888
Опубліковано: 10.09.2010
Автори: Кримов Юрій Іванович, КУЗНЕЦОВ ОЛЕКСАНДР СТЕПАНОВИЧ, Панченко Валерій Павлович, Урманов Валерій Павлович
МПК: E21F 17/00, E21F 13/00
Мітки: крокуюча, монорейкова, дорога
Формула / Реферат:
1. Дорога монорейкова крокуюча, що містить опори, балку, монорейку з елементами кріплення її на балці, яка відрізняється тим, що монорейка в місцях з'єднання її з балкою забезпечена жорстко з'єднаною з нею пластиною, а по осі балки встановлено гніздо з двома поглибленнями, що відповідають профілю пластин, рівних за товщиною глибині гнізда.2. Дорога за п. 1, яка відрізняється тим, що кожне гніздо забезпечене фіксаторами, виконаними у...
Монтажна платформа превентора
Номер патенту: 30008
Опубліковано: 11.02.2008
Автори: Сушинський Іван Іванович, Бездрабко Сергій Сергійович, Клоченко Володимир Олександрович, Калинович Володимир Миколайович, Євчук Любомир Володимирович
МПК: E21B 33/03
Мітки: платформа, превентора, монтажна
Формула / Реферат:
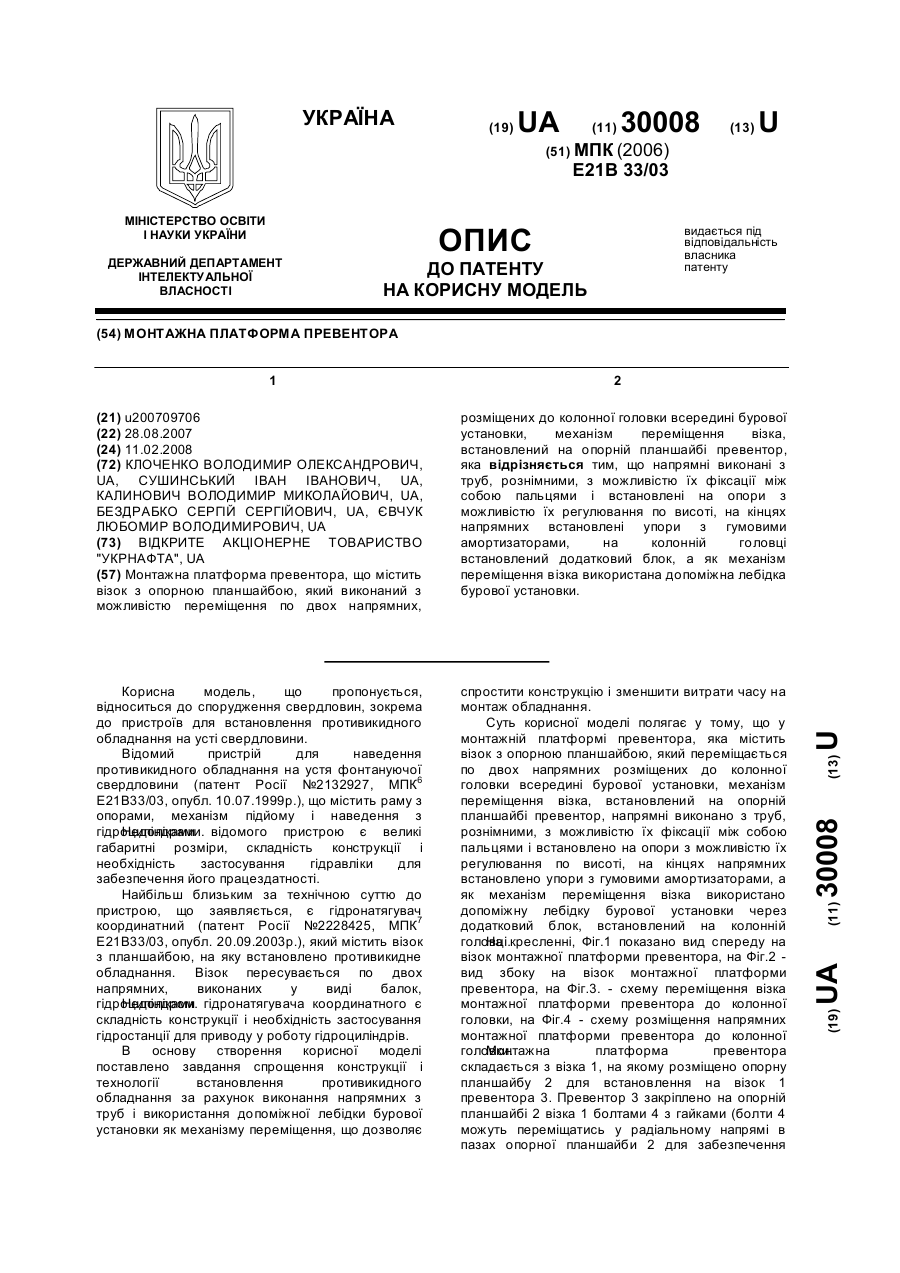
Монтажна платформа превентора, що містить візок з опорною планшайбою, який виконаний з можливістю переміщення по двох напрямних, розміщених до колонної головки всередині бурової установки, механізм переміщення візка, встановлений на опорній планшайбі превентор, яка відрізняється тим, що напрямні виконані з труб, рознімними, з можливістю їх фіксації між собою пальцями і встановлені на опори з можливістю їх регулювання по висоті, на кінцях...
Попередній патент: Пристрій пальця косарки
Наступний патент: Замок з ”антипанічною” функцією
Випадковий патент: Спосіб лікування хворих на туберкульоз легень