Спосіб вимірювання магнітного поля
Номер патенту: 99187
Опубліковано: 25.07.2012
Автори: Голяка Роман Любомирович, Большакова Інеса Антонівна

Формула / Реферат
Спосіб вимірювання магнітного поля, що включає вимірювання вихідної напруги гальваномагнітного перетворювача та розрахунок індукції вимірюваного магнітного поля за виміряним значенням вихідної напруги та чутливістю гальваномагнітного перетворювача, причому гальваномагнітний перетворювач містить принаймні дві пари виводів, а вимірювання проводять в два етапи - на першому етапі першу пару виводів підключають до джерела живлення гальваномагнітного перетворювача, а другу пару виводів використовують для вимірювання вихідної напруги, на другому етапі першу пару виводів використовують для вимірювання вихідної напруги, а другу пару виводів підключають до джерела живлення гальваномагнітного перетворювача, який відрізняється тим, що вказану чутливість гальваномагнітного перетворювача визначають принаймні на одному із зазначених етапів, при цьому вимірюють принаймні два значення вихідної напруги, перше з яких є значенням вимірюваного магнітного поля, а друге є сумою значень вимірюваного магнітного поля та тестового магнітного поля, величина якого є наперед визначеною.
Текст
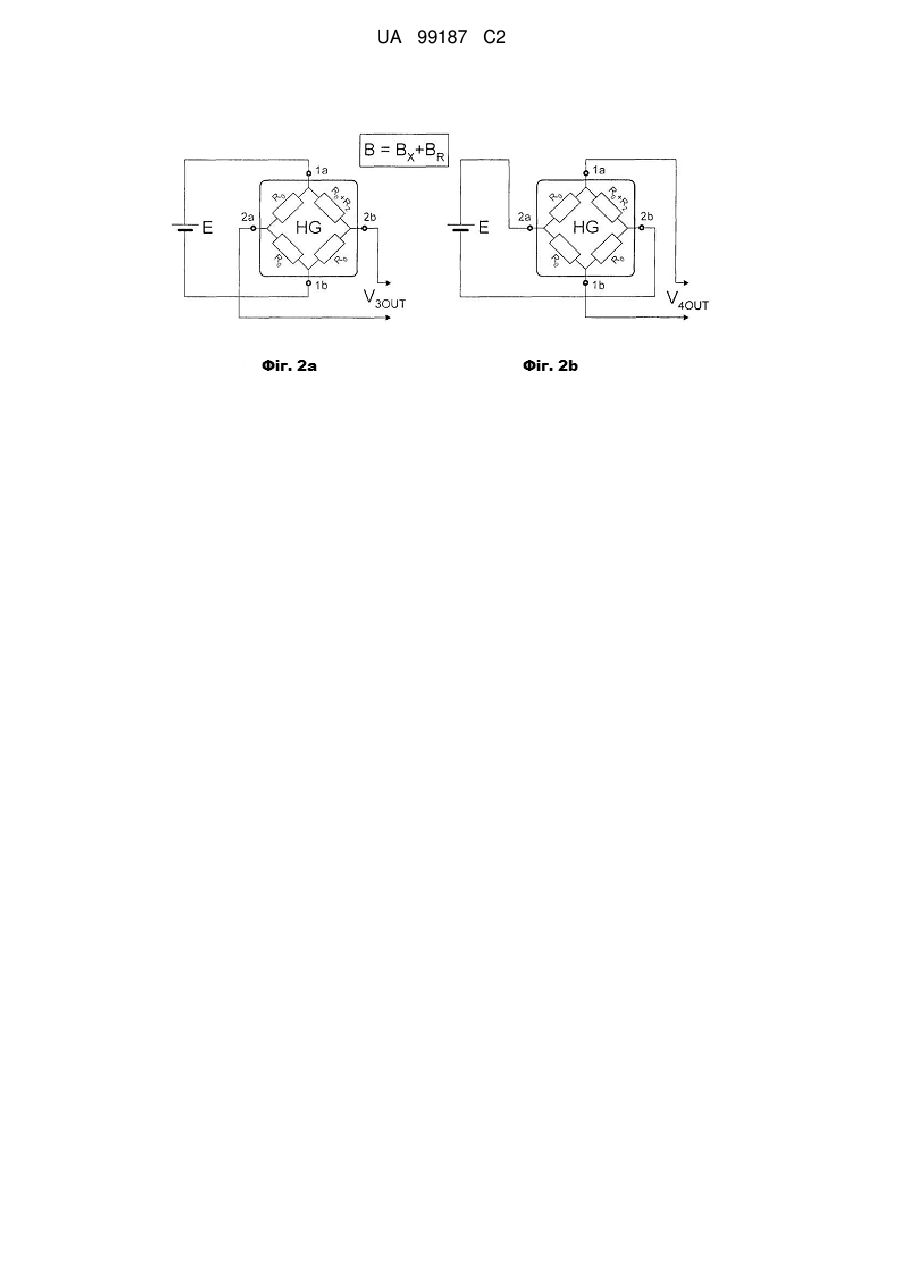
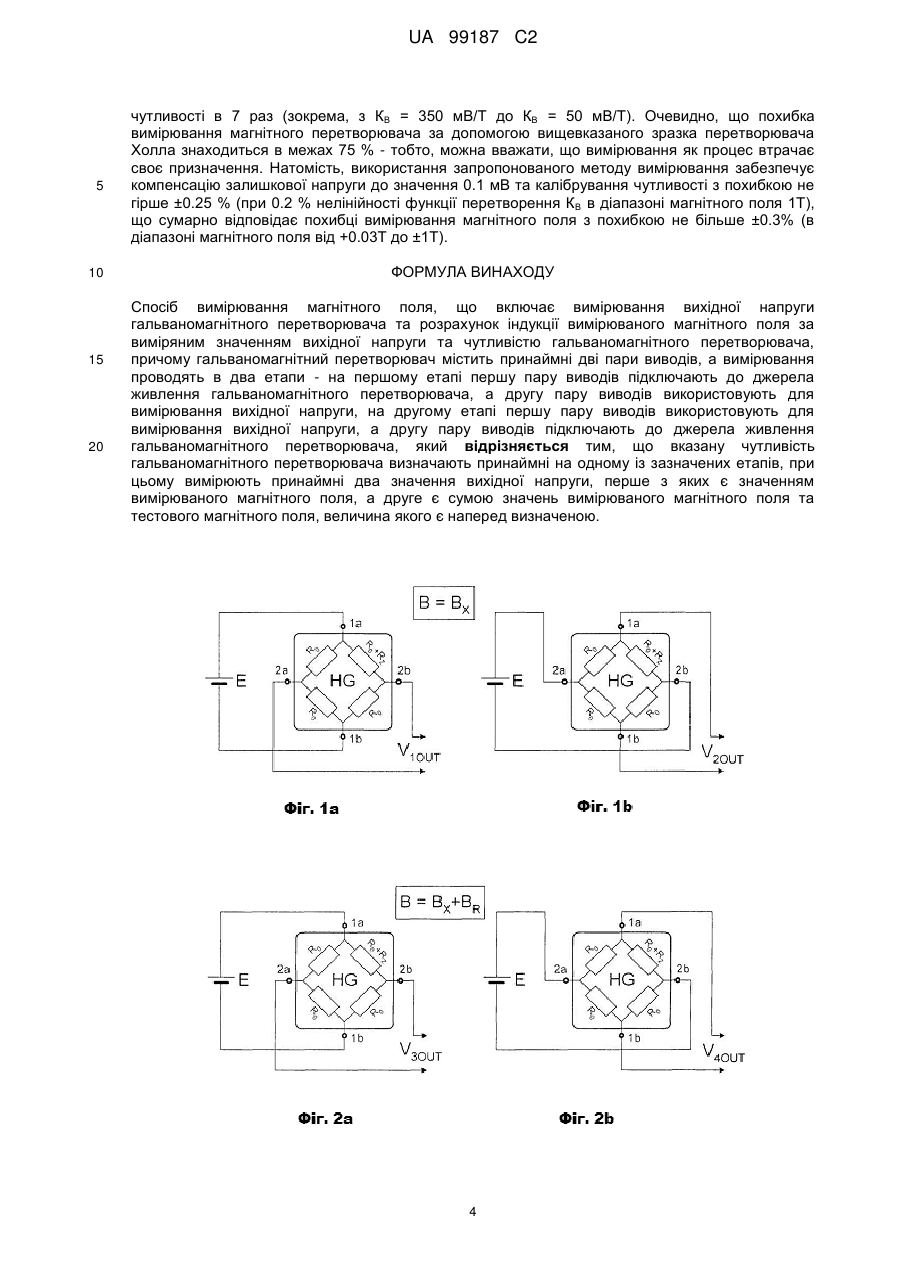
Реферат: Винахід належить до вимірювальної техніки і може бути використаний для вимірювання магнітних полів в реакторах термоядерного синтезу. Спосіб вимірювання магнітного поля включає вимірювання вихідної напруги гальваномагнітного перетворювача та розрахунок індукції вимірюваного магнітного поля за виміряним значенням вихідної напруги та чутливістю гальваномагнітного перетворювача, який містить принаймні дві пари виводів. Вимірювання проводять в два етапи - на першому етапі першу пару виводів підключають до джерела живлення гальваномагнітного перетворювача, а другу пару виводів використовують для вимірювання вихідної напруги, на другому етапі першу пару виводів використовують для вимірювання вихідної напруги, а другу пару виводів підключають до джерела живлення гальваномагнітного перетворювача. Вказану чутливість гальваномагнітного перетворювача визначають принаймні на одному із зазначених етапів. При цьому вимірюють принаймні два значення вихідної напруги, перше з яких є значенням вимірюваного магнітного поля, а друге є сумою значень вимірюваного магнітного поля та тестового магнітного поля, величина якого є наперед визначеною. Спосіб забезпечує підвищення точності вимірювань за рахунок періодичного калібрування чутливості гальваномагнітного перетворювача безпосередньо в процесі вимірювання магнітного поля. UA 99187 C2 (12) UA 99187 C2 UA 99187 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід стосується вимірювальної техніки, а саме способів вимірювання магнітного поля, які базуються на гальваномагнітних вимірювальних перетворювачах і може бути застосований, зокрема, для вимірювання квазістаціонарних магнітних полів в реакторах термоядерного синтезу. Відомий спосіб вимірювання магнітного поля, який базується на вимірюванні вихідної напруги гальваномагнітного перетворювача, зокрема напівпровідникового перетворювача Холла, та подальшому розрахунку індукції магнітного поля з використанням наперед відомої величини чутливості перетворювача, [Popovic R.S. Hall effect devices: magnetic sensor and characterization of semiconductors. IOP Publishing Ltd. 1991. P. 188. Fig. 4.22.]. Приклавши до гальваномагнітного перетворювача відповідним чином напругу (струм) живлення, в ньому створюють потік носіїв заряду. Під дією сили Лоренца на рухомі носії заряду в гальваномагнітному перетворювачі виникає сигнал, наприклад різниця напруг на вихідних виводах перетворювача Холла. Ця напруга є інформативним сигналом процесу вимірювання магнітного поля. Коефіцієнт перерахунку виміряної напруги в індукцію магнітного поля є наперед відомим та незмінним. Недоліком такого способу є низька точність вимірювання магнітного поля в жорстких умовах експлуатації, зокрема в умовах високої проникаючої радіації. Причиною цього є зміна електрофізичних параметрів гальваномагнітних перетворювачів в умовах проникаючої радіації, зокрема зміна чутливості (крутизни перетворення, тобто мультиплікативної складової лінійної функції перетворення) та залишкової напруги (вихідної напруги при нульовому значенню магнітного поля, тобто адитивної складової лінійної функції перетворення) гальваномагнітних перетворювачів при довготривалій дії на них заряджених частинок чи нейтронів. Відомий спосіб вимірювання магнітного поля, який базується на вимірюванні вихідної напруги гальваномагнітного перетворювача та розрахунку індукції вимірюваного магнітного поля з використанням значення вищевказаної напруги та чутливості (мультиплікативної складової лінійної функції перетворення) вищевказаного перетворювача, причому чутливість перетворювача визначається в процесі його періодичного калібрування за допомогою тестового магнітного поля. Таке калібрування проводиться in-situ, тобто, безпосередньо в об'єкті, де з метою вимірювання магнітного поля, розміщено вимірювальний зонд. Тестове магнітне поле формується котушкою, в якій знаходиться гальваномагнітний перетворювач. Котушка та відповідним чином розміщений в ній гальваномагнітний перетворювач утворюють єдину конструкцію - функціонально інтегрований зонд. Величина тестового магнітного поля, яка визначається струмом живлення котушки і вважається відомою, та виміряне значення вихідної напруги гальваномагнітного перетворювача, яке обумовлене тестовим магнітним полем, є інформативними величинами в процесі розрахунку чутливості гальваномагнітного перетворювача [Bolshakova I., Holyaka R., Leroy C. Novel approaches towards the development of Hall sensor-based magnetometric devices for charged particle accelerators // IEEE Transactions on Applied Superconductivity. - 2002. - Vol.12, №1. - P. 1655-1658.]. Перевагою вказаного способу вимірювання [Bolshakova I., Holyaka R., Leroy С. Novel approaches towards the development of Hall sensor-based magnetometric devices for charged particle accelerators // IEEE Transactions on Applied Superconductivity. - 2002. - Vol.12, №1. - P. 1655-1658.] є можливість періодичного калібрування шляхом визначення чутливості (мультиплікативної складової лінійної функції перетворення) гальваномагнітного перетворювача в умовах довготривалої дії на нього проникаючої радіації. Принципово важливим є те, що в процесі періодичного калібрування немає необхідності виймати зонд з об'єкта, де проводиться вимірювання магнітного поля. Ця перевага має принципово важливе значення при вимірюванні магнітного поля в радіаційних умовах експлуатації, зокрема в реакторах чи прискорювачах заряджених частинок. Під дією високої радіації має місце дрейф параметрів гальваномагнітних перетворювачів, тому є необхідним їх періодичне калібрування. Таке калібрування необхідно проводити in-situ. Недоліком вищевказаного способу [Bolshakova I., Holyaka R., Leroy C. Novel approaches towards the development of Hall sensor-based magnetometric devices for charged particle accelerators // IEEE Transactions on Applied Superconductivity. - 2002. - Vol.12, №1. - P. 16551658.] є низька точність періодичного in-situ калібрування, що обумовлено неможливістю визначення дрейфу в радіаційних умовах експлуатації залишкової напруги (адитивної складової лінійної функції перетворення). Відомий спосіб компенсації залишкової напруги гальваномагнітного перетворювача Холла, який містить дві пари виводів, причому вимірювання проводять в два етапи [Popovic R.S. Hall effect devices: magnetic sensor and characterization of semiconductors. IOP Publishing Ltd. 1991. P. 190. Fig. 4.24.]. На першому етапі першу пару виводів використовують для живлення 1 UA 99187 C2 5 10 15 20 25 30 35 40 45 50 55 60 гальваномагнітного перетворювача, а другу пару використовують для вимірювання вихідної напруги, на другому етапі першу пару виводів використовують для вимірювання вихідної напруги, а другу пару використовують для живлення гальваномагнітного перетворювача. Значення вихідних напруг першого та другого етапів вимірювання підсумовують, що дозволяє компенсувати залишкову напругу гальваномагнітного перетворювача без необхідності проводити періодичне визначення дрейфу цієї залишкової напруги (адитивної складової лінійної функції перетворення) шляхом переміщення гальваномагнітного перетворювача з зони, де проводиться вимірювання магнітного поля в нуль-камеру (пристрій, що шляхом магнітного екранування забезпечує нульове значення магнітного поля). Перевагою вказаного способу вимірювання [Popovic R.S. Hall effect devices: magnetic sensor and characterization of semiconductors. IOP Publishing Ltd. 1991. P. 190. Fig. 4.24.] є компенсація впливу дрейфу залишкової напруги (адитивної складової лінійної функції перетворення) в радіаційних умовах експлуатації гальваномагнітного перетворювача на результат вимірювання магнітного поля. Недоліком вищевказаного способу вимірювання [Popovic R.S. Hall effect devices: magnetic sensor and characterization of semiconductors. IOP Publishing Ltd. 1991. P. 190. Fig. 4.24.] є неможливість визначити дрейф чутливості (мультиплікативної складової лінійної функції перетворення) гальваномагнітного перетворювача, що обмежує точність вимірювання магнітного поля. В основу винаходу поставлено задачу підвищення точності відомого способу вимірювання магнітного поля за допомогою гальваномагнітного перетворювача який містить принаймні дві пари виводів, причому вимірювання проводять в два етапи - на першому етапі перша пара виводів використовується для живлення гальваномагнітного перетворювача, а друга пара - для вимірювання вихідної напруги, на другому етапі перша пара виводів використовується для вимірювання вихідної напруги, а друга пара - для живлення гальваномагнітного перетворювача, при цьому підвищення точності досягається за рахунок періодичного калібрування чутливості гальваномагнітного перетворювача безпосередньо в процесі вимірювання магнітного поля з використанням для такого калібрування принаймні двох значень вихідної напруги, перше з яких зумовлене дією лише вимірюваного магнітного поля, а друге сумою вимірюваного магнітного поля та тестового поля, величина якого є наперед відомою. Запропонований спосіб вимірювання магнітного поля далі пояснюється кресленнями, де на Фіг.1а, Фіг.1b зображено схеми формування вихідної напруги гальваномагнітного перетворювача, обумовленої вимірюваним Вх магнітним полем на першому етапі (фіг. 1а) та на другому етапі (фіг. 1b). на Фіг. 2а, Фіг. 2b зображено схеми формування вихідної напруги гальваномагнітного перетворювача, обумовленої сумою вимірюваного В х та тестового BZ магнітних полів на першому етапі (Фіг. 2а) та на другому етапі (Фіг. 2b). Гальваномагнітний перетворювач (Hall Generator, HG) - це типово прямокутна напівпровідникова структура, що має дві пари виводів: перша пара - виводи 1а, 1b, друга пара виводи 2а, 2b. Такі перетворювачі функціонують на принципі відхилення носіїв заряду під дією сили Лоренца, а різниця їх вихідних напруг обумовлюється ефектом Холла. Живлення перетворювача HG здійснюється джерелом напруги або джерелом струму (Е) . При живленні перетворювача HG через виводи la, lb, вихідна напруга V 1OUT знімається з виводів 2а, 2b (Фіг.1а) . Схема гальваномагнітного перетворювача представлена резисторами R 0 та RZ, причому опір RZ в схему введено для опису несиметрії перетворювача. Структура ідеального гальваномагнітного перетворювача є симетричною, що відповідає умові RZ=0. При відсутності магнітного поля (В=0) вихідна напруга ідеального перетворювача HG є нульовою V OUT (В=0)=0. Однак, реальні перетворювачі не мають ідеальної симетрії, що обумовлено, зокрема, нерівномірністю розподілу домішок в напівпровідниковому матеріалі, з якого виготовлений перетворювач, відхиленням розмірів структури, анізотропією тощо. Наявність опору R Z, який представляє сумарний вплив вказаних ефектів на вихідну напругу, призводить до формування залишкової напруги VOUT (В=0) =VRZ. Під дією магнітного поля Вх вихідна напруга V1OUT гальваномагнітного перетворювача (Фіг. 1а) в першому наближенні є пропорційною індукції магнітного поля В X і при наявності залишкової напруги VRZ становить V1OUT=КBВX+VRZ, (1) де КB - чутливість (коефіцієнт пропорційності лінійної функції перетворення). Як випливає з схеми Фіг. 1b на другому етапі вимірювання знак залишкової напруги V RZ змінюється на протилежний, тобто вихідна напруга гальваномагнітного перетворювача становить 2 UA 99187 C2 5 10 15 20 25 30 35 40 45 50 55 V2OUT = KBBX-VRZ. (2) Ефект компенсації залишкової напруги VRZ досягається підсумовування результатів вимірювання в обох етапах V1OUT + V2OUT=2KBBx. (3) Таким чином, дрейф залишкової напруги VRZ гальваномагнітного перетворювача, що має місце, зокрема, в тривалих радіаційних умовах експлуатації перетворювача, не впливає на результат вищерозглянутого двоетапного вимірювання. Однак, проблемою залишається дрейф чутливості КB, що не дозволяє досягти необхідної точності вимірювання магнітного поля. Ця проблема, відповідно до винаходу, усувається тим, що чутливість КB гальваномагнітного перетворювача визначають принаймні на одному з вищевказаних етапів шляхом вимірювання принаймні двох значень вихідної напруги, перше з яких обумовлене вимірюваним магнітним полем, а друге сумою вимірюваного магнітного поля та тестового поля, величина якого є наперед відомою (Фіг.2а, Фіг.2b). Результатами вимірювання вихідної напруги, обумовленої сумою вимірюваного В X та тестового BR магнітних полів, при використанні гальваномагнітного перетворювача по схемі першого етапу є V3OUT = KB(BX+BR)+VRZ. (4) Аналогічно, вихідною напругою по схемі другого етапу є V4OUT =KB(BX+BR)-VRZ. (5) Використовуючи результати проведених вимірювань отримують V3OUT-V1OUT = KBBR (6) V4OUT-V2OUT = KBBR. (7) Чутливість гальваномагнітного визначають використовуючи рівняння (6) або (7) V3 OUT V1OUT KB BR . (8) Реалізація вимірювань вихідної напруги гальваномагнітного перетворювача, обумовленої сумою вимірюваного магнітного поля Вх та тестового магнітного поля BR, може бути здійснена за допомогою котушки, яка разом з гальваномагнітним перетворювачем утворює єдиний вимірювальний зонд і знаходиться в зоні вимірювання магнітного поля. Можливі два методи створення тестового магнітного поля. В першому наперед відоме значення тестового магнітного поля BR реалізується шляхом живлення котушки заданим струмом. Величина тестового магнітного поля котушки визначається її геометричними розмірами, кількістю витків та струмом живлення. Тому це тестове поле не залежить від дестабілізуючих радіаційних умов експлуатації і може вважатися наперед відомою та стабільною величиною. Другий метод реалізації тестового магнітного поля передбачає, що вимірюване поле є змінною в часі величиною. Зміна вимірюваного магнітного поля визначається за допомогою котушки і служить як тестове поля B R. Як і у вищенаведеному першому методі, впливом радіаційних умов та параметри котушки можна знехтувати, а тому сигнал котушки, за допомогою якої визначають значення тестового поля BR, можна вважати стабільним. Важливо відзначити, що використання котушки для вимірювання зміни вимірюваного магнітного поля, що служить тестовою величиною BR, є виправданим лише при певних параметрах зміни цього поля. Так, котушка, значення вихідної напруги, на якій визначається швидкістю зміни магнітного поля в часі, не дозволяє вимірювати постійні чи квазістаціонарні магнітні поля, а тому в запропонованому методі вимірювання не може замінити гальваномагнітний перетворювач. Натомість, гальваномагнітний перетворювач не має жодних обмежень на вимірювання постійних чи квазістаціонарних магнітних полів, однак стабільність його залишкової напруги та чутливості в дестабілізуючих, зокрема, радіаційних умовах експлуатації, є незадовільною. Ця проблема вирішується запропонованим способом вимірювання магнітного поля, що дозволяє поєднувати, з одного боку компенсацію залишкової напруги, а з другого калібрування чутливості гальваномагнітного перетворювача. Таким чином запропонований спосіб забезпечує високу точність вимірювання магнітного поля за допомогою гальваномагнітного перетворювача в довготривалих дестабілізуючих умовах його експлуатації, зокрема, під дією високого рівня проникаючої радіації. В залежності від умов експлуатації (рівня дестабілізуючої дії) запропонований спосіб дозволяє підвищити точність вимірювання на декілька порядків. Зокрема, при флуєнсі швидких 18 -2 нейтронів 10 см деградація гальваномагнітного перетворювача на основі напівпровідникового матеріалу InSb призводить до збільшення залишкової напруги в 5 раз (зокрема, для типового зразку перетворювача Холла з VRZ = 1 мВ до VRZ = 5 мВ) та зменшення 3 UA 99187 C2 5 10 15 20 чутливості в 7 раз (зокрема, з КВ = 350 мВ/Т до КВ = 50 мВ/Т). Очевидно, що похибка вимірювання магнітного перетворювача за допомогою вищевказаного зразка перетворювача Холла знаходиться в межах 75 % - тобто, можна вважати, що вимірювання як процес втрачає своє призначення. Натомість, використання запропонованого методу вимірювання забезпечує компенсацію залишкової напруги до значення 0.1 мВ та калібрування чутливості з похибкою не гірше ±0.25 % (при 0.2 % нелінійності функції перетворення КВ в діапазоні магнітного поля 1T), що сумарно відповідає похибці вимірювання магнітного поля з похибкою не більше ±0.3% (в діапазоні магнітного поля від +0.03Т до ±1Т). ФОРМУЛА ВИНАХОДУ Спосіб вимірювання магнітного поля, що включає вимірювання вихідної напруги гальваномагнітного перетворювача та розрахунок індукції вимірюваного магнітного поля за виміряним значенням вихідної напруги та чутливістю гальваномагнітного перетворювача, причому гальваномагнітний перетворювач містить принаймні дві пари виводів, а вимірювання проводять в два етапи - на першому етапі першу пару виводів підключають до джерела живлення гальваномагнітного перетворювача, а другу пару виводів використовують для вимірювання вихідної напруги, на другому етапі першу пару виводів використовують для вимірювання вихідної напруги, а другу пару виводів підключають до джерела живлення гальваномагнітного перетворювача, який відрізняється тим, що вказану чутливість гальваномагнітного перетворювача визначають принаймні на одному із зазначених етапів, при цьому вимірюють принаймні два значення вихідної напруги, перше з яких є значенням вимірюваного магнітного поля, а друге є сумою значень вимірюваного магнітного поля та тестового магнітного поля, величина якого є наперед визначеною. 4 UA 99187 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of magnetic field
Автори англійськоюBolshakova Inesa Antonivna, Holiaka Roman Liubomyrovych
Назва патенту російськоюСпособ измерения магнитного поля
Автори російськоюБольшакова Инесса Антоновна, Голяка Роман Любомирович
МПК / Мітки
МПК: G01R 33/06
Мітки: магнітного, спосіб, поля, вимірювання
Код посилання
<a href="https://ua.patents.su/7-99187-sposib-vimiryuvannya-magnitnogo-polya.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання магнітного поля</a>
Спосіб вимірювання квазістаціонарного магнітного поля
Номер патенту: 82496
Опубліковано: 25.04.2008
Автори: Голяка Роман Любомирович, Большакова Інеса Антонівна, Гєрасімов Сєргєй Ніколаєвіч
МПК: H01L 43/00, G01R 33/06
Мітки: магнітного, вимірювання, спосіб, поля, квазістаціонарного
Формула / Реферат:
1. Спосіб вимірювання квазістаціонарного магнітного поля, який включає вимірювання вихідної напруги гальваномагнітного перетворювача та наступний розрахунок індукції вимірюваного магнітного поля за виміряним значенням вихідної напруги та наперед відомою чутливістю гальваномагнітного перетворювача, яку визначають шляхом періодичного калібрування гальваномагнітного перетворювача через встановлення співвідношення між зміною магнітного поля та...
Спосіб вимірювання напруженості магнітного поля в локальних ділянках виробів із феромагнітних матеріалів
Номер патенту: 23040
Опубліковано: 10.05.2007
Автори: Барановський Денис Миколайович, Жулай Олександр Юрійович, Бобрицький Віталій Миколайович, Лисенко Сергій Володимирович, Солових Євгеній Костянтинович, Аулін Віктор Васильович
МПК: G01R 33/02
Мітки: напруженості, матеріалів, спосіб, вимірювання, феромагнітних, поля, ділянках, магнітного, виробів, локальних
Формула / Реферат:
Спосіб вимірювання напруженості магнітного поля в локальних ділянках виробів із феромагнітних матеріалів, що включає компенсацію тангенціальної складової напруженості їх магнітного поля магнітним полем струму в обмотці потенціалометра, один із полюсів якого здійснює періодичні коливання в межах локальної ділянки, який відрізняється тим, що забезпечують переміщення полюсів потенціалометра у напрямку, перпендикулярному до поверхні вимірювання,...
Магнітометр третього порядку для вимірювання осьового октупольного моменту джерел зовнішньго магнітного поля
Номер патенту: 43185
Опубліковано: 15.11.2001
Автор: Дегтярьов Віталій Валентинович
МПК: G01V 3/08, G01R 33/02
Мітки: поля, магнітометр, вимірювання, третього, октупольного, осьового, магнітного, зовнішньго, моменту, джерел, порядку
Формула / Реферат:
Магнітометр третього порядку для вимірювання осьового октупольного моменту джерел зовнішнього магнітного поля, що містить магніточутливі датчики, які розташовані навколо вимірюваного джерела поля, який відрізняється тим, що він виконаний з дванадцяти датчиків, з яких вісім рівномірно розташовані на двох колах радіуса R, осі яких співпадають, а їх центри віддалені від центру вимірювального пристрою на координату ± z, яка пов'язана з радіусом R...
Пристрій для вимірювання магнітного поля
Номер патенту: 47587
Опубліковано: 10.02.2010
Автор: Антошко Валентин Якович
МПК: G01R 33/00
Мітки: пристрій, поля, вимірювання, магнітного
Формула / Реферат:
Пристрій для вимірювання магнітного поля, що містить джерело змінного електричного струму, феромагнітний сердечник, вимірювальну котушку (соленоїд) та індикаторний прилад, який відрізняється тим, що феромагнітний сердечник з'єднаний з джерелом змінного електричного струму, а вимірювальна котушка (соленоїд) з'єднана з індикаторним приладом.
Датчик для вимірювання температури і магнітного поля
Номер патенту: 33148
Опубліковано: 15.02.2001
Автори: Варшава Славомир Степанович, Ющук Степан Іванович, Венгер Евген Федорович, Прохорович Анатолій Вікторович
МПК: H01L 43/00, G01K 7/00
Мітки: датчик, магнітного, температури, вимірювання, поля
Текст:
...Х-и,5 з питомим опором 5ии-Іши Омш контакти створені з привареного лудженого мідного дроту, закріпленого ІНДІЄМ. встановлено, що виготовлення чутливого елемента датчика а пресованого марганець-цинкового фериту даного складу І питомого опору *абе»~ печуе добру температурну чутливість датчика в Інтервалі U».,+IOU°C s коефіцієнтом тК0-£ 5&/R, а також його чутливість до магнітних полів s коефіцієнтом^^ Ом /тл дз Оскільки...