Система автоматичного супроводу по напрямку повітряних об’єктів з диференціальним зв’язком
Номер патенту: 99368
Опубліковано: 10.08.2012
Автори: Булгач Віктор Леонардович, Зайцев Григорій Фролович, Градобоєва Неля Вікторівна, Кривуца Володимир Георгійович

Формула / Реферат
Система автоматичного супроводу по напрямку азимуту/куту місця повітряних об'єктів з диференціальним зв'язком, що складається з послідовного з'єднання пеленгаційного пристрою, що містить на вході антену, а на виході фазовий детектор, послідовного коригувального пристрою, а також послідовно з'єднаних підсилювача постійного струму, електромашинного підсилювача, виконавчого двигуна, через редуктор з'єднаного з антеною пеленгаційного пристрою, яка відрізняється тим, що додатково введений диференціальний зв'язок, що складається з динамічних ланок - математичних моделей аперіодичної ланки двигуна, пеленгаційного пристрою, аперіодичної ланки, пристрою, що диференціює, коригувальної ланки і двох суматорів, причому перший вхід першого суматора через ланку, що диференціює, з'єднаний з виходом фазового детектора, другий його вхід через послідовно з'єднані моделі аперіодичної ланки двигуна, моделі пеленгаційного пристрою, аперіодичної ланки з'єднаний з електромашинним підсилювачем, вихід першого суматора через коригувальну ланку з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом послідовного коригувального пристрою, а вихід другого суматора з'єднаний із входом підсилювача постійного струму.
Текст
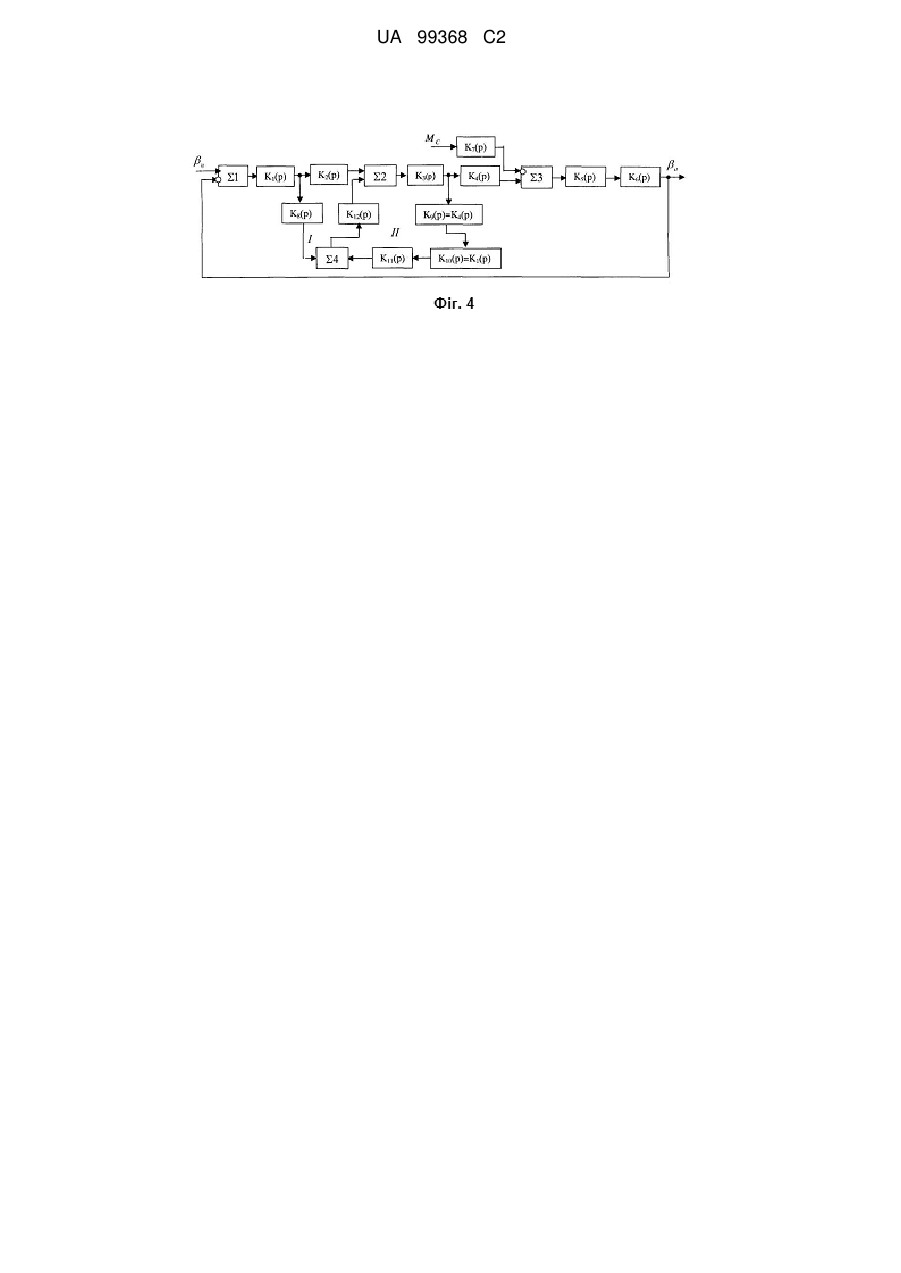
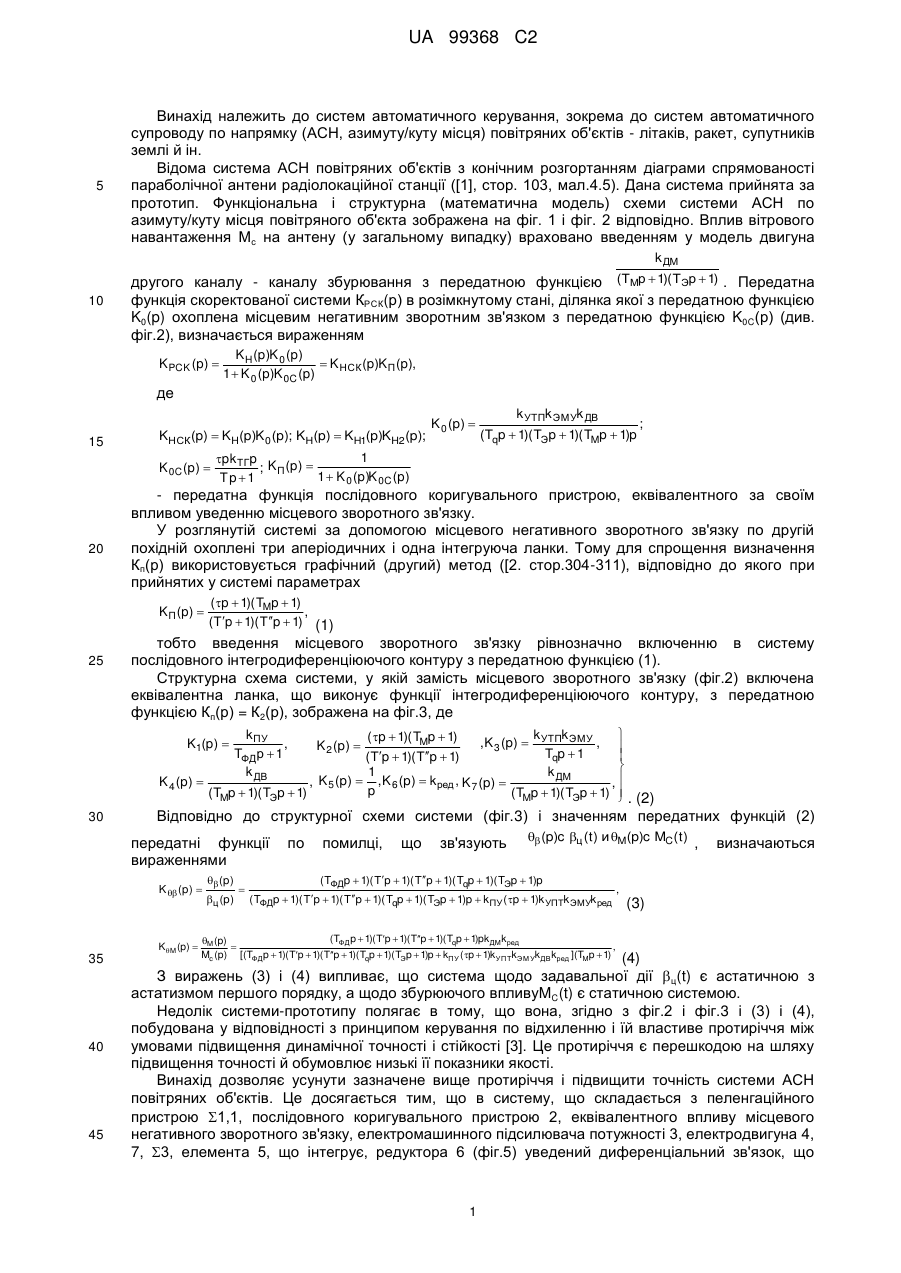
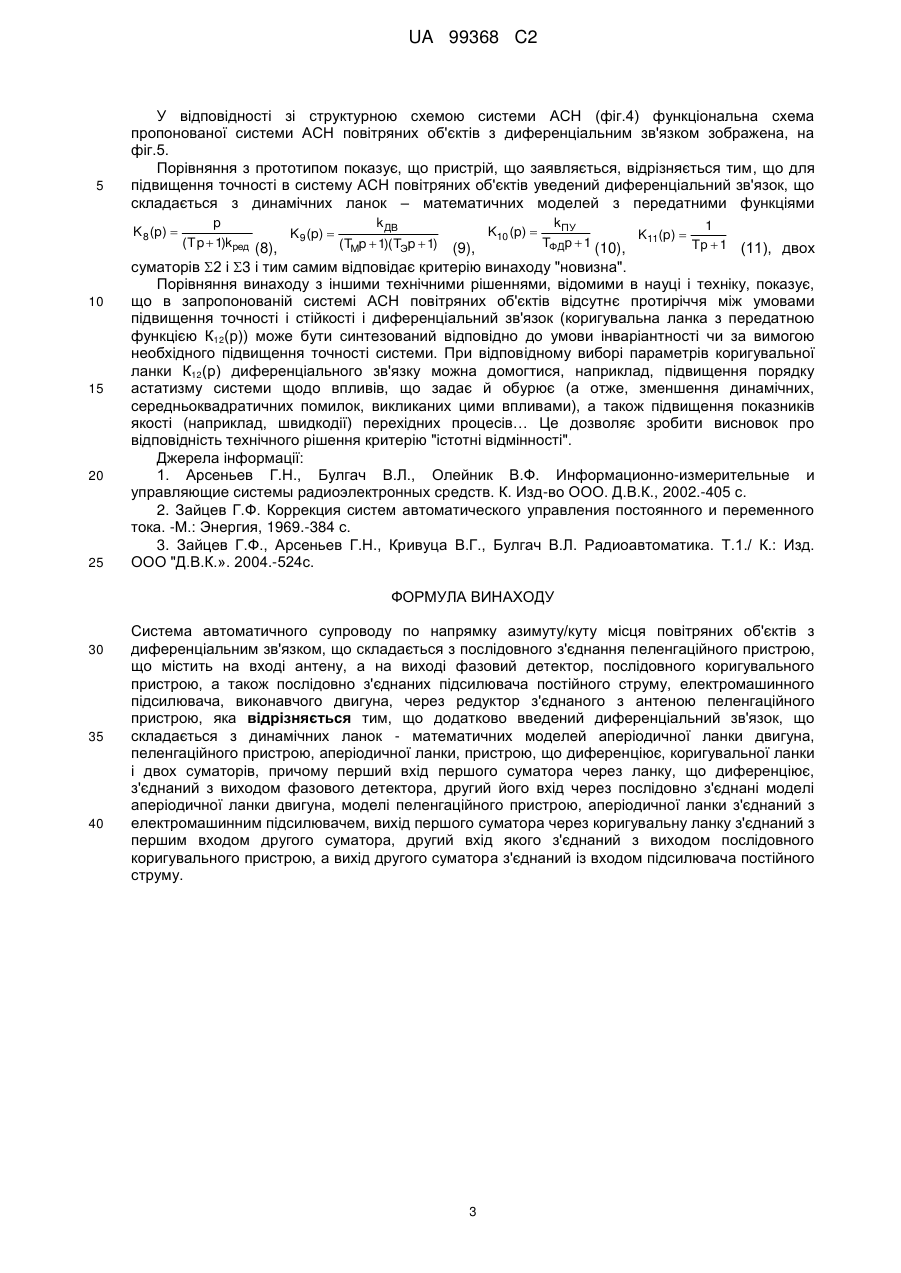
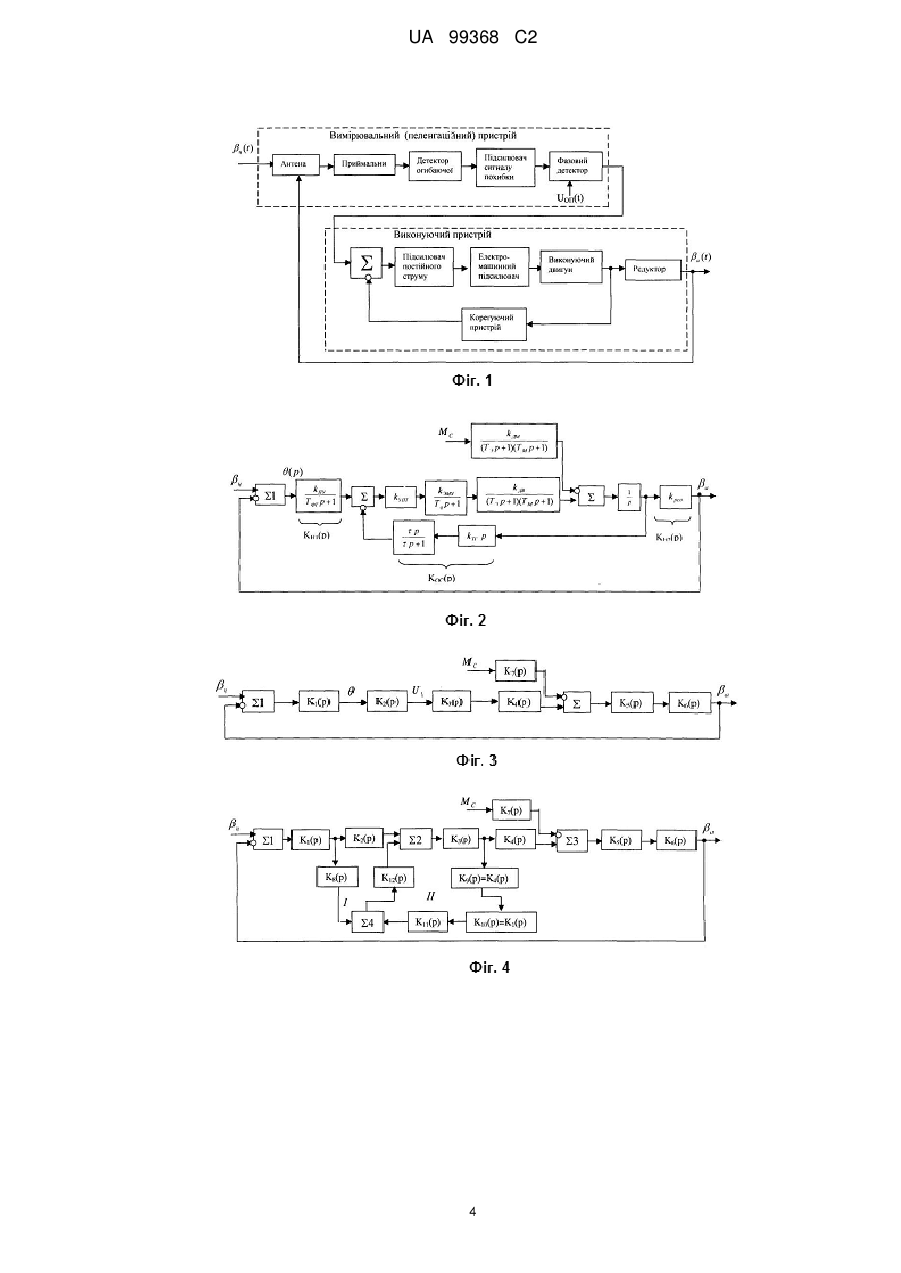
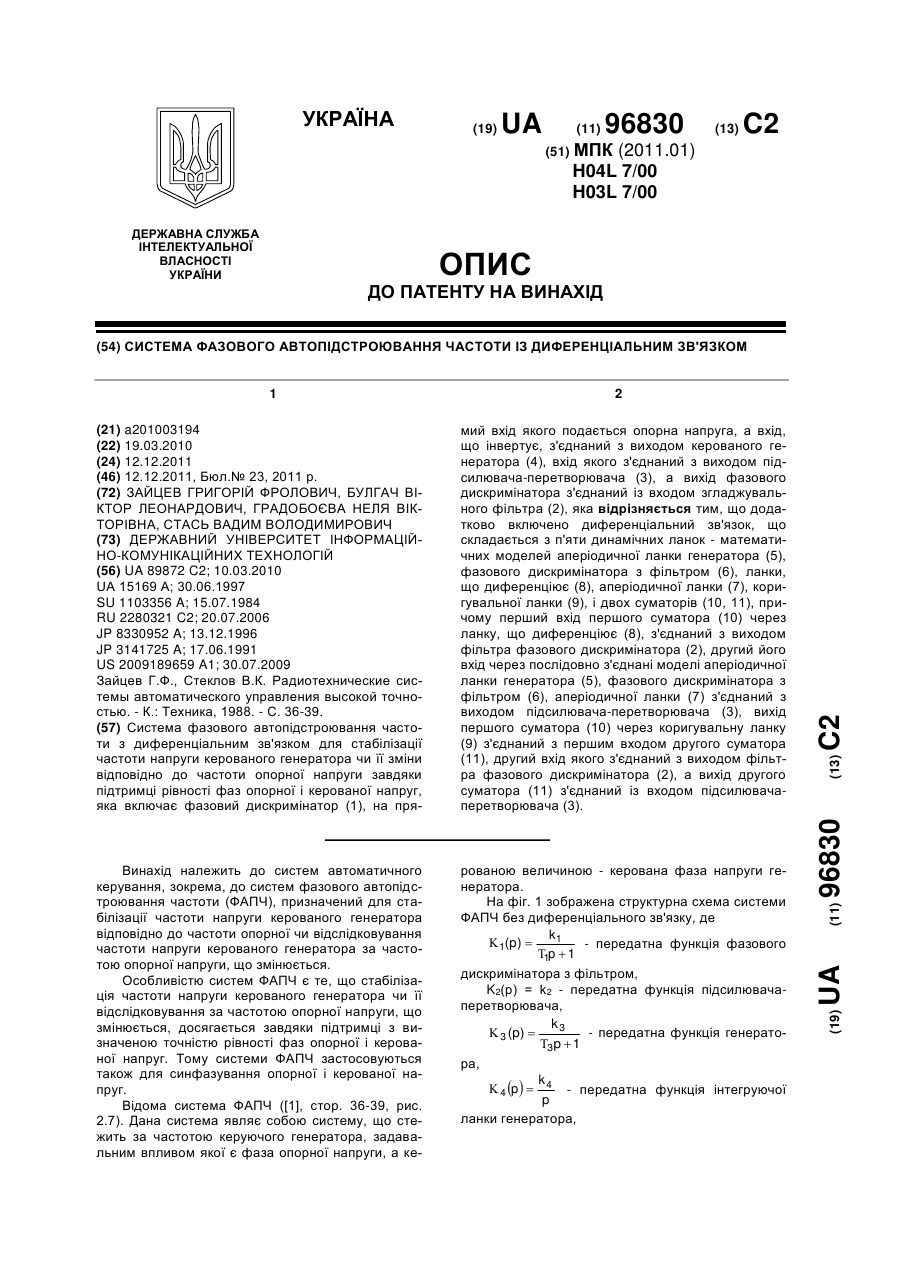
Реферат: Система автоматичного супроводу по напрямку азимуту/куту місця повітряних об'єктів з диференціальним зв'язком належить до систем автоматичного керування, зокрема до радіолокаційної станції з конічним розгортанням діаграми спрямованості, моноімпульсних систем автосупроводу повітряних об'єктів по напрямку. Система містить послідовно з'єднані пеленгаційний пристрій, що містить на вході антену, а на виході - фазовий детектор, послідовний коригувальний пристрій, перший суматор, підсилювач постійного струму, електромашинний підсилювач, електродвигун і редуктор, через який двигун з'єднаний з антеною. А також диференціальний зв'язок - послідовно з'єднані математичні моделі аперіодичної ланки двигуна, пеленгаційного пристрою, другий суматор, пристрій, що коригує. Причому вхід математичної моделі аперіодичної ланки двигуна з'єднаний з виходом електромашинного підсилювача, а вихід коригувальної ланки в диференціальному зв'язку з'єднаний з другим входом першого суматора. Другий вхід другого суматора з'єднаний через ланку, що диференціює, з виходом фазового детектора. Технічним результатом є усунення протиріччя між умовами підвищення точності і стійкості системи та підвищення точності і швидкодії супроводу повітряних об'єктів по напрямку. UA 99368 C2 (12) UA 99368 C2 UA 99368 C2 5 Винахід належить до систем автоматичного керування, зокрема до систем автоматичного супроводу по напрямку (АСН, азимуту/куту місця) повітряних об'єктів - літаків, ракет, супутників землі й ін. Відома система АСН повітряних об'єктів з конічним розгортанням діаграми спрямованості параболічної антени радіолокаційної станції ([1], стор. 103, мал.4.5). Дана система прийнята за прототип. Функціональна і структурна (математична модель) схеми системи АСН по азимуту/куту місця повітряного об'єкта зображена на фіг. 1 і фіг. 2 відповідно. Вплив вітрового навантаження Мс на антену (у загальному випадку) враховано введенням у модель двигуна k ДМ (ТМр 1)( ТЭр 1) . Передатна 10 другого каналу - каналу збурювання з передатною функцією функція скоректованої системи КРСК(р) в розімкнутому стані, ділянка якої з передатною функцією K0(p) охоплена місцевим негативним зворотним зв'язком з передатною функцією K0C(р) (див. фіг.2), визначається вираженням K PCK (p) K H (p)K 0 (p) K НСК (p)K П (p), 1 K 0 (p)K 0C (p) де 15 KНСК(p) KH(p)K0 (p); KН(p) KH1(p)KH2(p); K 0C (p) 20 k УТПk ЭМУk ДВ (Tqp 1)( TЭp 1)( TMp 1)p ; 1 pkТГp ; K П (p ) 1 K 0 (p )K 0C (p ) Tp 1 - передатна функція послідовного коригувального пристрою, еквівалентного за своїм впливом уведенню місцевого зворотного зв'язку. У розглянутій системі за допомогою місцевого негативного зворотного зв'язку по другій похідній охоплені три аперіодичних і одна інтегруюча ланки. Тому для спрощення визначення Кп(р) використовується графічний (другий) метод ([2. стор.304-311), відповідно до якого при прийнятих у системі параметрах K П (p) 25 K 0 (p) ( p 1)( TMp 1) , (Tp 1)( Tp 1) (1) тобто введення місцевого зворотного зв'язку рівнозначно включенню в систему послідовного інтегродиференціюючого контуру з передатною функцією (1). Структурна схема системи, у якій замість місцевого зворотного зв'язку (фіг.2) включена еквівалентна ланка, що виконує функції інтегродиференціюючого контуру, з передатною функцією Кп(р) = К2(р), зображена на фіг.3, де k k ( p 1)( TMp 1) , K 3 (p) УТП ЭМУ , Tqp 1 (Tp 1)( Tp 1) 1 k ДМ K 4 (p) , K 5 (p) , K 6 (p) kред , K 7 (p) , p (TMp 1)( TЭp 1) (TMp 1)( TЭp 1) . (2) K1(p) 30 kПУ , TФДр 1 k ДВ Відповідно до структурної схеми системи (фіг.3) і значенням передатних функцій (2) передатні функції вираженнями K (p) 35 40 45 K 2 (p) K M(p) (p) ц (p) по помилці, що зв'язують (p)c ц (t ) и M(p)c MC ( t ) , (TФДp 1)( Tp 1)( Tp 1)( Tqp 1)( TЭp 1)p (TФДp 1)( Tp 1)( Tp 1)( Tqp 1)( TЭp 1)p kПУ ( p 1)k УПТkЭМУkред (TФДp 1)( Tp 1)( Tp 1)( Tqp 1)pk ДМkред M(p) , Mc (p) [(TФДp 1)( Tp 1)( Tp 1)( Tqp 1)( TЭp 1)p kПУ ( p 1)k УПТkЭМУk ДВkред ](TMp 1) визначаються , (3) (4) З виражень (3) і (4) випливає, що система щодо задавальної дії ц(t) є астатичною з астатизмом першого порядку, а щодо збурюючого впливуMC(t) є статичною системою. Недолік системи-прототипу полягає в тому, що вона, згідно з фіг.2 і фіг.3 і (3) і (4), побудована у відповідності з принципом керування по відхиленню і їй властиве протиріччя між умовами підвищення динамічної точності і стійкості [3]. Це протиріччя є перешкодою на шляху підвищення точності й обумовлює низькі її показники якості. Винахід дозволяє усунути зазначене вище протиріччя і підвищити точність системи АСН повітряних об'єктів. Це досягається тим, що в систему, що складається з пеленгаційного пристрою 1,1, послідовного коригувального пристрою 2, еквівалентного впливу місцевого негативного зворотного зв'язку, електромашинного підсилювача потужності 3, електродвигуна 4, 7, 3, елемента 5, що інтегрує, редуктора 6 (фіг.5) уведений диференціальний зв'язок, що 1 UA 99368 C2 5 складається з плеча I, що містить динамічну ланку 8 з передатною функцією К8(р) і плеча II, що містить динамічні ланки 9,10,11 з передатними функціями К9(р),К10(р),К11(р) і двох суматорів 2, 4. На фіг. 1 зображена функціональна схема системи АСН повітряних об'єктів-прототипу; на фіг.2 - структурна схема системи АСН із місцевим негативним зворотним зв'язком; на фіг.3 структурна схема системи АСН з еквівалентним послідовним коригувальним контуром; на фіг.4 структурна схема системи АСН із диференціальним зв'язком; на фіг.5 - функціональна схема системи АСН із диференціальним зв'язком. На фіг. 1-5 передатні функції: kПУ TФДр 1 - пеленгаційного пристрою 1 і відповідної математичної моделі 10; ( p 1)( TMp 1) K 2 (p) ( Tp 1)( Tp 1) - послідовного коригувального пристрою 2, еквівалентного впливу K1(p) 10 місцевого зворотного зв'язку; K3 (p) K 4 (p) 15 k УТПkЭМУ Tqp 1 - підсилювача постійного струму і ЕМУ 3; k ДВ (TMp 1)( TЭp 1) - двигуна 4 і його моделі 9 у диференціальному зв'язку; 1 K 5 (p) p - інтегратора; K 6 (p) kред - редуктора; k ДМ K7 (p) (TMp 1)( TЭp 1) - каналу збурювання 7 двигуна; p K5 (p) (Tp 1)kред - диференціюючого пристрою 8 у плечі І диференціального зв'язку; 1 K 3 (з) K 4 (p);K10 (p) K1(p); K11(p) ; Tp 1 20 К12(р) - визначається в результаті синтезу відповідно до умов підвищення точності системи. Відповідно до пропонованої структурної схеми (фіг.4) система АСН із диференціальним зв'язком описується наступним рівнянням для помилки Д (p) Д (p) МД(p), де Д ( t ) 1 K 4 (p)K1(p)K11(p)K12 (p)K 3 (p) w (p), 1 K1(p)K 2 (p)K 3 (p)K 4 (p)K 5 (p)K 6 (p) (5) МД( t ) [1 K 4 (p)K1(p)K11(p)K12 (p)K 3 (p)]K 7 (p)K 5 (p)K 6 (p) MC (p), 1 K1(p)K 2 (p)K 3 (p)K 4 (p)K 5 (p)K 6 (p) (6) 25 30 - складові помилки системи, викликані змінами що задає w(t) й обурює МС(t) впливів відповідно. Згідно з (5) і (6) умовами інваріантості (незалежності) помилки системи щодо задавальної дії w(t) й збурючої дії Mc(t) збігаються і визначаються вираженням 1 K 4 (p)K1(p)K11(p)K12 (p)K3 (p) 0, (7) а характеристичне рівняння, що визначає корені замкнутої частини системи і її стійкість, має вигляд: 35 40 1 K1(p)K2(p)K3 (p)K 4 (p)K5 (p)K6 (p) 0, (8) З виражень (7) і (8) випливає, що передатна функція К12(р) коригуючого пристрою в диференціальному зв'язку, за рахунок якого може бути досягнута інваріантність чи необхідне підвищення точності системи, не входить у характеристичне рівняння замкнутої частини і не впливає на її стійкість, тобто в пропонованій АСН відсутнє протиріччя між умовами підвищення точності і стійкості і передатна функція К12(р) коригуючого пристрою в диференціальному зв'язку може вибиратися відповідно до умови інваріантності (7) чи відповідно до вимоги необхідного підвищення точності, не впливаючи на стійкість замкнутої частини системи. 2 UA 99368 C2 5 У відповідності зі структурною схемою системи АСН (фіг.4) функціональна схема пропонованої системи АСН повітряних об'єктів з диференціальним зв'язком зображена, на фіг.5. Порівняння з прототипом показує, що пристрій, що заявляється, відрізняється тим, що для підвищення точності в систему АСН повітряних об'єктів уведений диференціальний зв'язок, що складається з динамічних ланок – математичних моделей з передатними функціями K8 (p) 10 15 20 25 k ДВ p K9 (p) (Tp 1)kред (8), (TMp 1)( TЭp 1) K10 (p) kПУ 1 K11(p) TФДр 1 (10), Tр 1 (11), двох (9), суматорів 2 і 3 і тим самим відповідає критерію винаходу "новизна". Порівняння винаходу з іншими технічними рішеннями, відомими в науці і техніку, показує, що в запропонованій системі АСН повітряних об'єктів відсутнє протиріччя між умовами підвищення точності і стійкості і диференціальний зв'язок (коригувальна ланка з передатною функцією К12(р)) може бути синтезований відповідно до умови інваріантності чи за вимогою необхідного підвищення точності системи. При відповідному виборі параметрів коригувальної ланки К12(р) диференціального зв'язку можна домогтися, наприклад, підвищення порядку астатизму системи щодо впливів, що задає й обурює (а отже, зменшення динамічних, середньоквадратичних помилок, викликаних цими впливами), а також підвищення показників якості (наприклад, швидкодії) перехідних процесів… Це дозволяє зробити висновок про відповідність технічного рішення критерію "істотні відмінності". Джерела інформації: 1. Арсеньев Г.Н., Булгач В.Л., Олейник В.Ф. Информационно-измерительные и управляющие системы радиоэлектронных средств. К. Изд-во ООО. Д.В.К., 2002.-405 с. 2. Зайцев Г.Ф. Коррекция систем автоматического управления постоянного и переменного тока. -М.: Энергия, 1969.-384 с. 3. Зайцев Г.Ф., Арсеньев Г.Н., Кривуца В.Г., Булгач В.Л. Радиоавтоматика. Т.1./ К.: Изд. ООО "Д.В.К.». 2004.-524с. ФОРМУЛА ВИНАХОДУ 30 35 40 Система автоматичного супроводу по напрямку азимуту/куту місця повітряних об'єктів з диференціальним зв'язком, що складається з послідовного з'єднання пеленгаційного пристрою, що містить на вході антену, а на виході фазовий детектор, послідовного коригувального пристрою, а також послідовно з'єднаних підсилювача постійного струму, електромашинного підсилювача, виконавчого двигуна, через редуктор з'єднаного з антеною пеленгаційного пристрою, яка відрізняється тим, що додатково введений диференціальний зв'язок, що складається з динамічних ланок - математичних моделей аперіодичної ланки двигуна, пеленгаційного пристрою, аперіодичної ланки, пристрою, що диференціює, коригувальної ланки і двох суматорів, причому перший вхід першого суматора через ланку, що диференціює, з'єднаний з виходом фазового детектора, другий його вхід через послідовно з'єднані моделі аперіодичної ланки двигуна, моделі пеленгаційного пристрою, аперіодичної ланки з'єднаний з електромашинним підсилювачем, вихід першого суматора через коригувальну ланку з'єднаний з першим входом другого суматора, другий вхід якого з'єднаний з виходом послідовного коригувального пристрою, а вихід другого суматора з'єднаний із входом підсилювача постійного струму. 3 UA 99368 C2 4 UA 99368 C2 Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automatic direction tracking airborne objects with differential constraint
Автори англійськоюZaitsev Hryhorii Frolovych, Kryvutsa Volomyr Heorhiiovych, Bulhach Viktor Leonardovych, Hradoboieva Nelia Viktorivna
Назва патенту російськоюСистема автоматического сопровождения по направлению воздушных объектов с дифференциальной связью
Автори російськоюЗайцев Григорий Фролович, Кривуца Владимир Георгиевич, Булгач Виктор Леонардович, Градобоева Неля Викторовна
МПК / Мітки
МПК: G05B 11/01
Мітки: супроводу, автоматичного, система, диференціальним, об'єктів, напрямку, повітряних, зв'язком
Код посилання
<a href="https://ua.patents.su/7-99368-sistema-avtomatichnogo-suprovodu-po-napryamku-povitryanikh-obehktiv-z-diferencialnim-zvyazkom.html" target="_blank" rel="follow" title="База патентів України">Система автоматичного супроводу по напрямку повітряних об’єктів з диференціальним зв’язком</a>
Система фазового автопідстроювання частоти із диференціальним зв’язком
Номер патенту: 96830
Опубліковано: 12.12.2011
Автори: Зайцев Григорій Фролович, Градобоєва Неля Вікторівна, Стась Вадим Володимирович, Булгач Віктор Леонардович
Мітки: система, диференціальним, фазового, частоти, автопідстроювання, зв'язком
Формула / Реферат:
Система фазового автопідстроювання частоти з диференціальним зв'язком для стабілізації частоти напруги керованого генератора чи її зміни відповідно до частоти опорної напруги завдяки підтримці рівності фаз опорної і керованої напруг, яка включає фазовий дискримінатор (1), на прямий вхід якого подається опорна напруга, а вхід, що інвертує, з'єднаний з виходом керованого генератора (4), вхід якого з'єднаний з виходом підсилювача-перетворювача...
Кореляційна система з диференціальним зв’язком вирівнювання часових запізнювань сигналів
Номер патенту: 87248
Опубліковано: 25.06.2009
Автори: Булгач Віктор Леонардович, Доля Олег Миколайович, Градобоєва Неля Вікторівна, Зайцев Григорій Фролович
МПК: G01S 7/40
Мітки: сигналів, часових, диференціальним, кореляційна, запізнювань, зв'язком, вирівнювання, система
Формула / Реферат:
Кореляційна система з диференціальним зв'язком вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, у першому з яких включений блок постійної затримки, вихід якого підключений до першого виходу системи, а також з'єднаний через перший блок затримки на ∆τ з першим входом першого корелятора і безпосередньо з першим входом другого корелятора, перший і другий корелятори складаються з послідовно...
Система підготовки аераційних повітряних потоків при пророщуванні зерна
Номер патенту: 58899
Опубліковано: 26.04.2011
Автори: Максименко Ірина Фаддеївна, Шевченко Олександр Юхимович, Соколенко Анатолій Іванович, Піддубний Володимир Антонович, Шевченко Анастасія Олександрівна
МПК: F25B 1/100
Мітки: система, аераційних, повітряних, зерна, потоків, пророщуванні, підготовки
Формула / Реферат:
Система підготовки аераційних повітряних потоків при пророщуванні зерна, що містить тракт підготовки та подавання повітря в ящики для пророщування зерна, яка відрізняється тим, що тракт підготовки та подавання повітря в ящики для пророщування зерна містить турбокомпресор з регульованою частотою обертання ротора, калорифер, вентилятор, дросель, змішувач потоків, контролер та регулюючі вентилі.
Система автоматичного водіння самохідної колісної машини
Номер патенту: 71847
Опубліковано: 15.12.2004
Автори: Парфьонова Наталя Сергійовна, Поляшенко Сергій Олексійович
МПК: A01B 69/04
Мітки: колісної, машини, автоматичного, система, самохідної, водіння
Формула / Реферат:
Система автоматичного водіння самохідної колісної машини, що містить регулятор, виконавчий елемент, датчик копіювання, датчик положення керуючих коліс і суматор, яка відрізняється тим, що з метою підвищення точності відстеження заданої траєкторії, введені регульований інтегратор і датчик швидкості, причому регульований інтегратор включений послідовно між додатковим входом суматора і виходом датчика копіювання, а ланцюг керування коефіцієнтом...
Відмовостійка система орієнтування датчиків повітряних параметрів

Номер патенту: 62526
Опубліковано: 25.08.2011
Автори: Гавриленко Ірина Володимирівна, Гордін Олександр Григорович
МПК: G01P 5/14
Мітки: орієнтування, відмовостійка, параметрів, датчиків, система, повітряних
Формула / Реферат:
1. Відмовостійка система орієнтування датчиків повітряних параметрів, що містить закріплені на поверхні літального апарата корпус приймача повітряного тиску та корпус датчика температури загальмованого потоку повітря, яка відрізняється тим, що в неї введені двовісний гіроскопічний стабілізатор, перший і другий аналогічні двовісні карданові підвіси, кожний з яких містить внутрішню раму, зв'язану зі скобою внутрішньої рами, зовнішню раму та по...
Попередній патент: Пристрій подачі лікарського засобу
Наступний патент: Спосіб зниження концентрації акцепторів у власнодефектних кристалах
Випадковий патент: Спосіб медіального внутрішньоматкового осіменіння свиноматок