Система фазового автопідстроювання частоти із диференціальним зв’язком
Номер патенту: 96830
Опубліковано: 12.12.2011
Автори: Градобоєва Неля Вікторівна, Стась Вадим Володимирович, Зайцев Григорій Фролович, Булгач Віктор Леонардович


Формула / Реферат
Система фазового автопідстроювання частоти з диференціальним зв'язком для стабілізації частоти напруги керованого генератора чи її зміни відповідно до частоти опорної напруги завдяки підтримці рівності фаз опорної і керованої напруг, яка включає фазовий дискримінатор (1), на прямий вхід якого подається опорна напруга, а вхід, що інвертує, з'єднаний з виходом керованого генератора (4), вхід якого з'єднаний з виходом підсилювача-перетворювача (3), а вихід фазового дискримінатора з'єднаний із входом згладжувального фільтра (2), яка відрізняється тим, що додатково включено диференціальний зв'язок, що складається з п'яти динамічних ланок - математичних моделей аперіодичної ланки генератора (5), фазового дискримінатора з фільтром (6), ланки, що диференціює (8), аперіодичної ланки (7), коригувальної ланки (9), і двох суматорів (10, 11), причому перший вхід першого суматора (10) через ланку, що диференціює (8), з'єднаний з виходом фільтра фазового дискримінатора (2), другий його вхід через послідовно з'єднані моделі аперіодичної ланки генератора (5), фазового дискримінатора з фільтром (6), аперіодичної ланки (7) з'єднаний з виходом підсилювача-перетворювача (3), вихід першого суматора (10) через коригувальну ланку (9) з'єднаний з першим входом другого суматора (11), другий вхід якого з'єднаний з виходом фільтра фазового дискримінатора (2), а вихід другого суматора (11) з'єднаний із входом підсилювача-перетворювача (3).
Текст
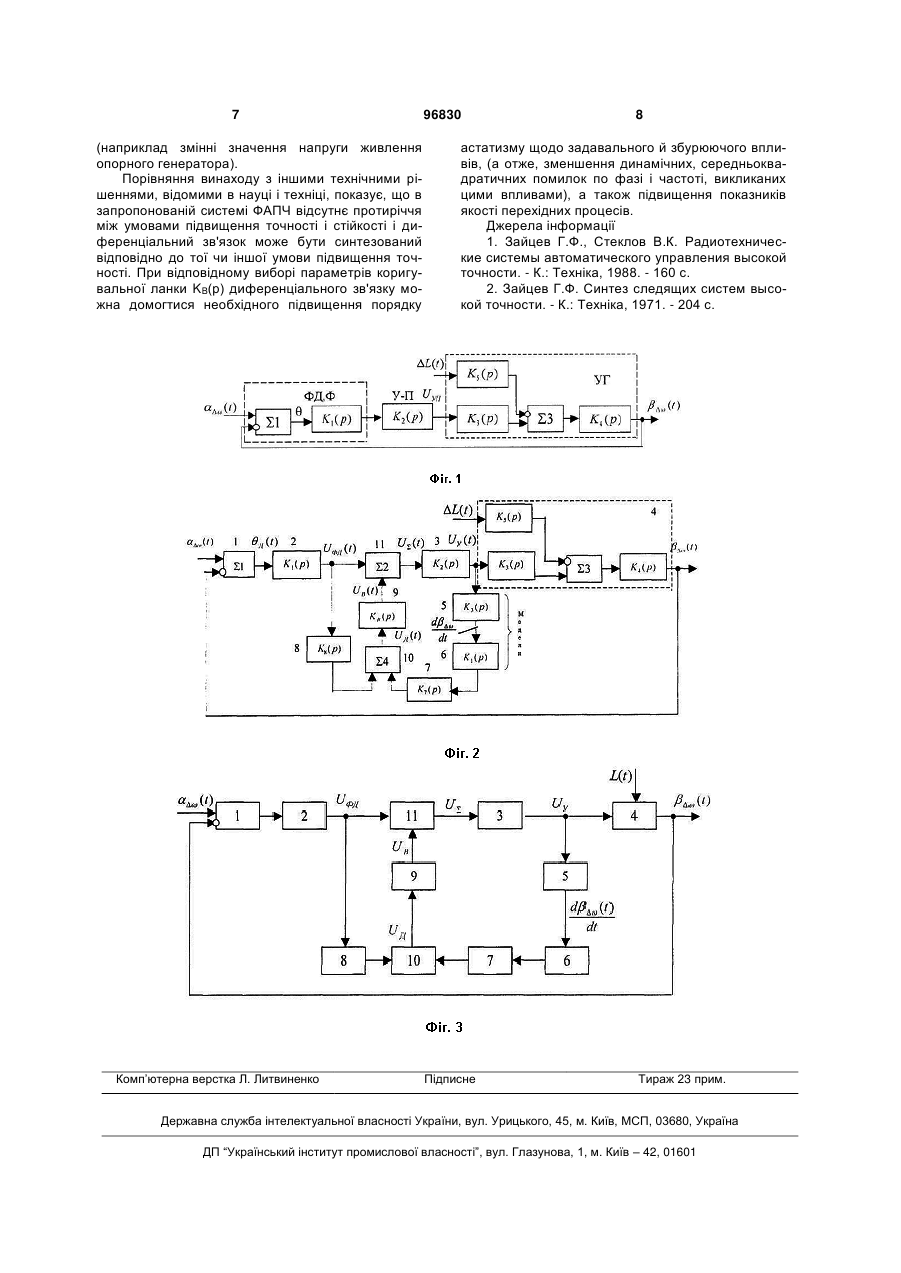
Система фазового автопідстроювання частоти з диференціальним зв'язком для стабілізації частоти напруги керованого генератора чи її зміни відповідно до частоти опорної напруги завдяки підтримці рівності фаз опорної і керованої напруг, яка включає фазовий дискримінатор (1), на пря C2 2 (19) 1 3 5 (p ) 96830 k5 - передатна функція каналу 5p 1 збурювання генератора. Точність такої системи ФАПЧ визначається помилкою спостереження за фазою і частотою опорної напруги. Помилка спостереження за фазою опорної напруги дорівнює нулю, але помилка спостереження за частотою (швидкістю зміни фази вхідного сигналу), а також помилки від значення впливу, що збурює, існують і впливають на точність системи: p p L p , де 1 p (p) , 1 1 K1(p)K 2 (p)K 3 (p) p L p K 5 (p) 1 p 1 K1(p)K 2 (P)K 3 (p) 1 p L(p) . Аналіз помилки системи показує, що підвищення точності, наприклад, шляхом зміни загального коефіцієнта передачі або введенням коригувальної ланки, приводить до зміни знаменника, а отже обов’язково впливає на стійкість системи. Дана система ФАПЧ прийнята за найближчий аналог. Недолік системи полягає в тому, що вона побудована на підставі принципу керування по відхиленню і їй властиве протиріччя між умовами підвищення точності і стійкості [2]. Це протиріччя є перешкодою підвищення точності системипрототипу й обумовлює низькі його показники якості. Винахід дозволяє виключити зазначене вище протиріччя і підвищити точність системи ФАПЧ. Це досягається тим, що в систему ФАПЧ, що складається з фазового дискримінатора 1, фільтра, що згладжує 2, підсилювача-перетворювача 3, керованого генератора 4 (фіг. 3) уведений диференціальний зв'язок, що складається з динамічних ланок 5, 6, 7, 8 і 9 з передатними функціями K3(р), K1(р), K7(р), K8(р), K9(р) відповідно і двох суматорів 10 і 11. На фіг. 1 зображена структурна схема (математична модель) системи ФАПЧ без диференціального зв'язку ([1], рис. 2.7,6); на фіг. 2 - структурна схема системи ФАПЧ із диференціальним зв'язком; на фіг. 3 - функціональна схема системи ФАПЧ із диференціальним зв'язком. На фіг. 1-3: k1 1(p ) - передатна функція фазового 1p 1 дискримінатора (1) з фільтром (2) і відповідної математичної моделі (6), K2 (р) = k2 - передатна функція підсилювачаперетворювача (3), k3 3 (p ) - передатна функція генерато3p 1 ра (4) без інтегруючої ланки і моделі (5) диференціального зв'язку, 4 4 p k4 - передатна функція інтегруючої p ланки генератора (4), k5 5 (p ) - передатна функція каналу 5p 1 збурювання генератора (4), 1 p - передатні фу 7 (p) , 8 (p) p 1 p 1 нкції аперіодичної (7) і ланки, що диференціює (8), диференціального зв'язку. Відповідно до пропонованої структурної схеми (фіг. 2) система ФАПЧ із диференціальним зв'язком описується наступним рівнянням для помилки: 1 1 1 p 2 p 3 p Д р p 1 1 3 p 1 p p 2 p p p 1 1 1 1 3 p 1 p p 2 p 5 p Lp . p 1 p Звідки зображення помилки Д p Д р LД р, де Д р 1 3 p 1p 1 p 2 p p 1 р , 1 1 1p 2 p 3 р p (1) 1 1 1 3 p1p p 1 p 2 p 5 p p LД р Lр (2) 1 1 1p 2 p 3 р p - складові помилки, викликані задавальним впливом t й збурюючим впливом L(t) відповідно. Згідно з (1) і (2) умови інваріантості (незалежності) помилки системи щодо впливів, що задає t й збурює L(t), збігаються і визначаються виразом: 1 1 3 p 1p p 2 p = 0, (3) p 1 а характеристичне рівняння, що визначає корені замкнутої частини системи і її стійкість, має вигляд: 1 1 1p 2 p 3 р = 0. (4) p З рівнянь (3) і (4) випливає, що передатна функція KB(р), за рахунок якої може бути досягнута інваріантість (3), не входить у характеристичне рівняння, тобто в пропонованій системі ФАПЧ відсутнє протиріччя між умовами підвищення точності і стійкості, і передатна функція КB(р) коригувального пристрою може вибиратися з умови інваріантості (підвищення точності), не впливаючи на стійкість замкнутої частини системи. З урахуванням структурної схеми ФАПЧ (фіг. 2) функціональна схема ФАПЧ із диференціальним зв'язком зображеним на фіг. 3. Система ФАПЧ із диференціальним зв'язком працює в такий спосіб. 5 На керований генератор (4) подається напруга уставки UУСТ (на фігурах не позначене), за допомогою якого в розімкнутому стані системи встановлюється напруга U1(t) генератора з частотою 2, яка дорівнює номінальній чи середній частоті опорної напруги 0. Завдяки цьому помилка системи при частоті опорної напруги 1 = 0 стає рівною нулю і помилка буде викликатися тільки різницею частоти = 1-0 опорної напруги щодо номінальної (середньої) частоти 0 і різницею частоти за рахунок впливу, що збурює, L(t). У цьому випадку впливом, що задає, буде вже не (t), фаза опорної напруги, частота якої 1, а фаза (t) напруги, частота якої дорівнює відхиленню (t) = 1(t) -0, частоти 1(t) опорної напруги від свого номінального (середнього) значення 0. Керованою величиною є керована зміна (t) фази (t) напруги U2(t) генератора. Якщо у випадку 1 =0 фаза (t) опорної напруги змінилася на постійну величину, то виникає помилка - різниця фаз (t) = (t) - (t). При цьому на виході фільтра (2) з'являється напруга неузгодженості UФД(t), пропорційна в сталому режимі помилці (t): UФД(t) = k1 (t). Напруга UФД(t) через підсилювач-перетворювач (3) у системі-прототипі надходить на керований генератор (4). Під впливом вихідної напруги UУ(t) підсилювача-перетворювача змінюється зміна (t) фази (t) вихідної напруги U2(t) генератора (4) таким чином, що помилка зменшується. Зміна (t) буде відбуватися доти, поки напруга UУ(t), що надходить на генератор, не стане рівною нулю, що можливо при (t) = (t) і (t)=0. Якщо ж частота 1(t) опорної напруги буде відрізнятися від оптимального (середнього) 0 значення ( (t) =1(t) -0), то (t) буде змінюватися відповідно до формули: t t t dt. 0 Для відповідної зміни (t) на генератор (4) необхідно подавати відповідну напругу. У системіпрототипі ця напруга (напруга UУ(t) формується з напруги помилки (t), тобто в системі-прототипі при зміні (t) виникає помилка (t) і (t) (t). Наприклад, якщо (t) = 1(t) - 0 = const, то фаза (t) буде змінюватися з постійною швидкістю (t) = t, яка дорівнює d (t)/dt = . Необхідно змінювати фазу (t) з такою ж швидкістю. У системі-прототипі це досягається за рахунок подачі постійної напруги UУ на вхід генератора (передатна функція якого містить інтегруючу ланку), яка формується з напруги помилки UФД(t), тобто в системі-прототипі при виникненні постійного відхилення частоти (t) опорної напруги виникає постійна помилка (t). 96830 6 У системі ФАПЧ із диференціальним зв'язком напруга UД(t) на виході суматора (10) у сталому режимі дорівнює: dt d t d ( t ) UД ( t ) k1 k1 k1 , dt dt dt тобто напруга UД(t) при = const дорівнює постійному значенню, пропорційному d t . Напруга UД(t) через коригувальну dt ланку (9) (у розглянутому випадку пропорційна ланка з передатною функцією KB(p) = kB) подається у вигляді UB(t) напруги на суматор (11), де складається з напругою UФД(t) помилки U t UД t UB t . Тому що напруга керування дорівнює: UУ(t) = k2U (t) = k2(UФД(t)+UB(t)), тобто формується із суми напруги помилки UФД(t) і напруги UB(t) диференціального зв'язку, то необхідна швидкість зміни (t) може бути досягнута (при відповідному коефіцієнті kB коригувальної ланки) тільки за рахунок вихідної напруги UB(t) диференціального зв'язку. Помилка системи (t) в сталому режимі (швидкісна помилка) при цьому стає рівною нулю. У системі-прототипі при зміні фази (t) по квадратичному чи більш складному законі (при зміні (t)) виникає зростаюча помилка (t), завдяки нелінійності статичної характеристики фазового дискримінатора зривів синхронної роботи. У системі з диференціальним зв'язком, вибираючи відповідним чином (синтезуючи) передатну функцію KB(р) коригувального пристрою (9), можна підвищити динамічну точність (за рахунок підвищення порядку астатизму системи) і показники якості перехідних процесів (наприклад, завдяки мінімізації квадратичної інтегральної оцінки, компенсації повільно загасаючих компонентів [2] і ін.) не тільки при (t) = const і (t) = (t), але і при зміні (t) і (t) по більш складних законах. У системі ФАПЧ помилка по частоті C(t) = 1(t) - 2(t), де C(t) = d (t)/dt. Тому в системіпрототипі виникає помилка по частоті при (t) const, у системі ж з диференціальним зв'язком помилка по частоті C(t) може бути зведена до нуля (як і помилка по фазі (t) ) при зміні (t). У системі ФАПЧ із диференціальним зв'язком, як випливає з (2), помилки по фазі і частоті можуть усуватися також при зміні впливу, що L(t) збурює, (напруги живлення генератора). Технічним результатом, який досягається при застосуванні заявленої системи, є підвищення показників якості перехідних процесів і забезпечення нульової помилки спостереження не тільки за фазою, як у прототипі, але і за частотою, тобто швидкістю зміни фази, а також забезпечення нульової помилки при дії впливу, що збурює, тобто забезпечення інваріантності помилки системи до вхідного сигналу, швидкості його зміни (фази і частоти опорного генератора) і до впливу, що збурює 7 (наприклад змінні значення напруги живлення опорного генератора). Порівняння винаходу з іншими технічними рішеннями, відомими в науці і техніці, показує, що в запропонованій системі ФАПЧ відсутнє протиріччя між умовами підвищення точності і стійкості і диференціальний зв'язок може бути синтезований відповідно до тої чи іншої умови підвищення точності. При відповідному виборі параметрів коригувальної ланки KB(р) диференціального зв'язку можна домогтися необхідного підвищення порядку Комп’ютерна верстка Л. Литвиненко 96830 8 астатизму щодо задавального й збурюючого впливів, (а отже, зменшення динамічних, середньоквадратичних помилок по фазі і частоті, викликаних цими впливами), а також підвищення показників якості перехідних процесів. Джерела інформації 1. Зайцев Г.Ф., Стеклов В.К. Радиотехнические системы автоматического управления высокой точности. - К.: Техніка, 1988. - 160 с. 2. Зайцев Г.Ф. Синтез следящих систем высокой точности. - К.: Техніка, 1971. - 204 с. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPhase lock system with a differential connection
Автори англійськоюZaitsev Hryhorii Frolovych, Bulhach Viktor Leonardovych, Hradoboieva Nelia Viktorivna, Stas Vadym Volodymyrovych
Назва патенту російськоюСистема фазовой автоподстройки частоты с дифференциальной связью
Автори російськоюЗайцев Григорий Фролович, Булгач Виктор Леонардович, Градобоева Неля Викторовна, Стась Вадим Владимирович
МПК / Мітки
Мітки: диференціальним, зв'язком, частоти, фазового, система, автопідстроювання
Код посилання
<a href="https://ua.patents.su/4-96830-sistema-fazovogo-avtopidstroyuvannya-chastoti-iz-diferencialnim-zvyazkom.html" target="_blank" rel="follow" title="База патентів України">Система фазового автопідстроювання частоти із диференціальним зв’язком</a>
Система фазового автопідстроювання із диференційним зв’язком
Номер патенту: 89872
Опубліковано: 10.03.2010
Автори: Бурсова Тетяна Вікторівна, Зайцев Григорій Фролович, Стась Вадим Володимирович, Булгач Віктор Леонардович
Мітки: зв'язком, автопідстроювання, фазового, диференційним, система
Формула / Реферат:
Система фазового автопідстроювання з диференційним зв'язком для узгодження фаз двох змінних напруг однієї частоти, де перша напруга через перший вхід системи надходить на перший вхід фазового дискримінатора та на перший вихід системи, друга напруга через другий вхід системи надходить на перший вхід фазообертача, другий вхід якого з'єднаний з виходом інтегратора, а вихід з'єднаний із другим виходом системи та через елемент зсуву фази на
Кореляційна система з диференціальним зв’язком вирівнювання часових запізнювань сигналів
Номер патенту: 87248
Опубліковано: 25.06.2009
Автори: Булгач Віктор Леонардович, Доля Олег Миколайович, Градобоєва Неля Вікторівна, Зайцев Григорій Фролович
МПК: G01S 7/40
Мітки: вирівнювання, диференціальним, сигналів, кореляційна, система, часових, зв'язком, запізнювань
Формула / Реферат:
Кореляційна система з диференціальним зв'язком вирівнювання часових запізнювань сигналів, що надходять від одного джерела по двох каналах, у першому з яких включений блок постійної затримки, вихід якого підключений до першого виходу системи, а також з'єднаний через перший блок затримки на ∆τ з першим входом першого корелятора і безпосередньо з першим входом другого корелятора, перший і другий корелятори складаються з послідовно...
Пристрій одноканального автопідстроювання частоти гетеродина в імпульсній радіолокаційній станції
Номер патенту: 14308
Опубліковано: 25.04.1997
Автори: Жарій Ігор Олександрович, Косінський Олексій Сергійович, Павлов Юрій Єфімович
МПК: G01S 13/00, H03L 7/08, H03L 7/00, G01S 13/34
Мітки: радіолокаційний, пристрій, автопідстроювання, імпульсний, гетеродина, станції, частоти, одноканального
Формула / Реферат:
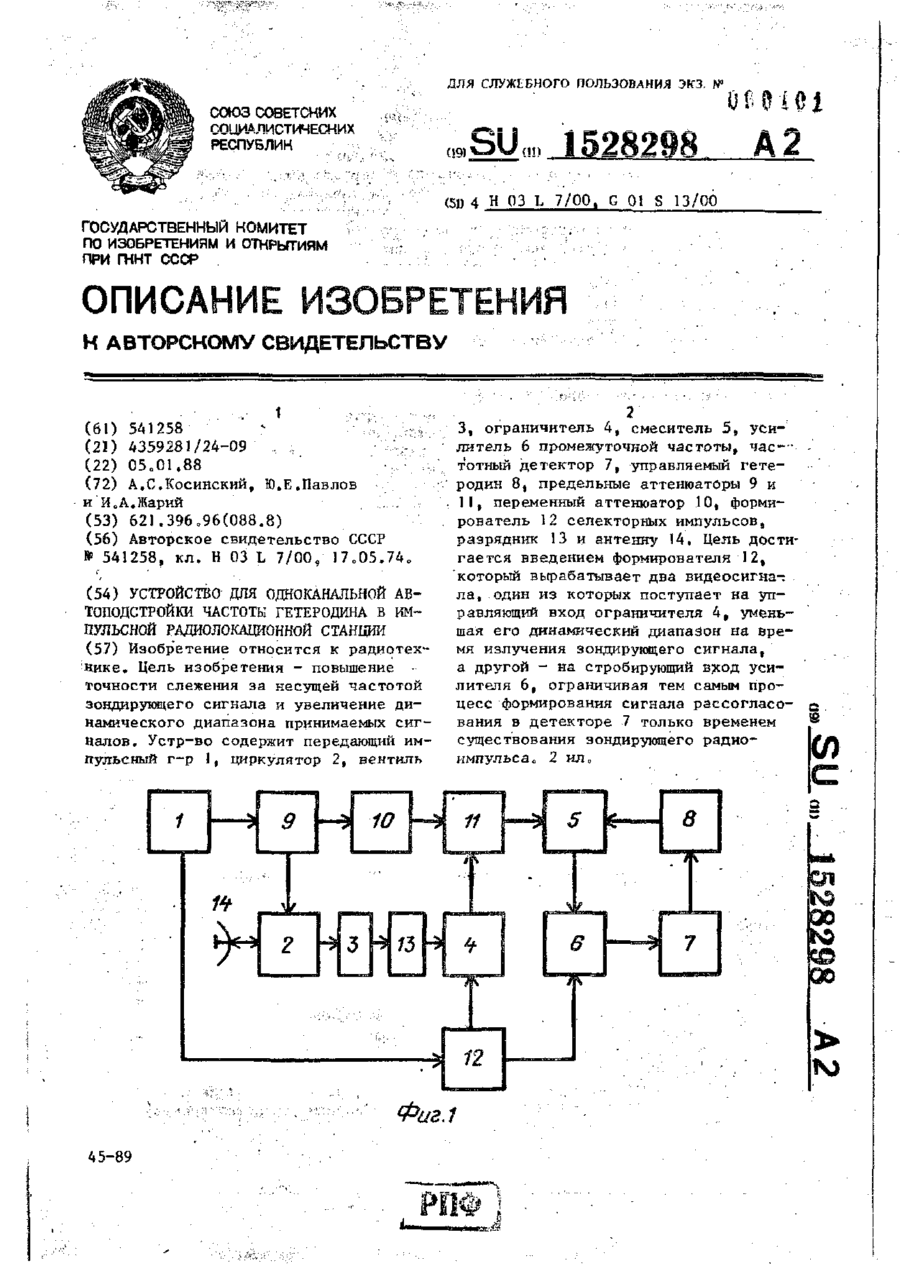
Устройство для одноканальной автоподстройки частоты гетеродина в импульсной радиолокационной станции по авт. св. № 541258, отличающееся тем, что, с целью повышения точности слежения за несущей частотой зондирующего сигнала и увеличения динамического диапазона принимаемых сигналов, в него введен формирователь селекторных импульсов, вход и первый и второй выходы которого соединены соответственно с дополнительным выходом передающего...
Пристрій для вимірювання короткочасної нестабільності частоти
Номер патенту: 68370
Опубліковано: 16.08.2004
Автори: Тимофеєв Євген Петрович, Клейман Олександр Самуїлович
МПК: G01R 23/00
Мітки: частоти, нестабільності, короткочасної, вимірювання, пристрій
Формула / Реферат:
Пристрій для вимірювання короткочасної нестабільності частоти, що складається з послідовно з’єднаних фазового детектора, підсилювача, перестроюваного фільтра верхніх частот і вимірювача середньоквадратичного значення напруги, а також кола фазового автопідстроювання частоти опорного генератора, який відрізняється тим, що в нього додатково введені регульований підсилювач, ввімкнений в коло фазового автопідстроювання, вольтметр, ввімкнений на...
Пристрій фазової автопідстройки частоти

Номер патенту: 61317
Опубліковано: 11.07.2011
Автори: Шулежко Володимир Васильович, Рот Світлана Миколаївна, Кулик Олександр Петрович, Чекунова Оксана Миколаївна, Лосєв Юрій Іванович, Макаров Сергій Анатолійович, Коломійцев Олексій Володимирович, Тітов Ігор Володимирович
МПК: H03L 7/00
Мітки: пристрій, фазової, частоти, автопідстройки
Формула / Реферат:
Пристрій фазової автопідстройки частоти, який містить послідовно з'єднані еталонний генератор, фазовий модулятор, перший фазовий детектор, перший фільтр нижніх частот і генератор керованої напруги, вихід якого з'єднаний із другими входами першого і другого фазових детекторів, а вихід другого фазового детектора з'єднаний з входом другого фільтра нижніх частот, постійна часу якого перевищує постійну часу першого фільтра нижніх частот, при...
Попередній патент: Привід велосипеда
Наступний патент: Напівавтомат виготовлення рамки решітки стола газової плити
Випадковий патент: Щліфувальний круг і спосіб формування і підтримки його подовжнього профілю