Аналоговий інтерфейс для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу
Номер патенту: 99709
Опубліковано: 25.06.2015

Формула / Реферат
1. Аналоговий інтерфейс для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу, що містить підключений до котушок індуктивного датчика генератор сигналів ініціалізації датчика, вимірювальний підсилювач, фазочутливий випрямляч, який керується регулятором фази, який відрізняється тим, що вихід генератора сигналів ініціалізації датчика під'єднано до початків обмоток диференціального індуктивного датчика та через шунтуючий резистор до загальної точки схеми, та через зразковий резистор до першого входу вимірювального підсилювача, другий вхід якого підключено до виходу першого автоматичного перемикача, входи якого підключені до кінців обмоток диференціального індуктивного датчика відповідно, при цьому перший та другий виходи вимірювального підсилювача підключені відповідно до першого та другого входів аналогового мультиплексора, третій вхід якого підключено до загальної точки схеми, а вихід до входу фазочутливого випрямляча, вихід якого під'єднано через перетворювач напруга-частота до входу однокристальної мікроЕОМ, керуючі виходи якої підключені до відповідних керуючих входів регулятора фази, вимірювального підсилювача, першого автоматичного перемикача та аналогового мультиплексора, а вихід синхронізації однокристальної мікроЕОМ підключений до входу синхронізації регулятора фази, вихід якого підключено до входу синхронізації генератора сигналів ініціалізації датчика, вихід якого через послідовно з'єднані аналоговий інвертор та регулюючий блок, що складається зі змінних резистора та конденсатора, до виходу першого автоматичного перемикача, окрім того на вхід синхронізації однокристальної мікроЕОМ підключений вихід блока синхронізації з мережевою напругою.
2. Аналоговий інтерфейс за п. 1, який відрізняється тим, що вимірювальний підсилювач містить перший операційний підсилювач, неінвертуючий вхід якого під'єднано до загальної точки схеми, а інвертуючий під'єднано до перших входів першого та другого автоматичних перемикачів, другі входи яких під'єднано до другого входу вимірювального підсилювача та до інвертуючого входу другого операційного підсилювача, неінвертуючий вхід якого під'єднано до загальної точки схеми, а вихід до першого виходу вимірювального підсилювача та через перший та другий резистори до виходів першого та другого автоматичних перемикачів відповідно, окрім цього вихід першого операційного підсилювача підключено до другого виходу вимірювального підсилювача та через третій резистор до інвертуючого входу першого операційного підсилювача, керуючі входи автоматичних перемикачів під'єднано до керуючого входу вимірювального підсилювача.
Текст
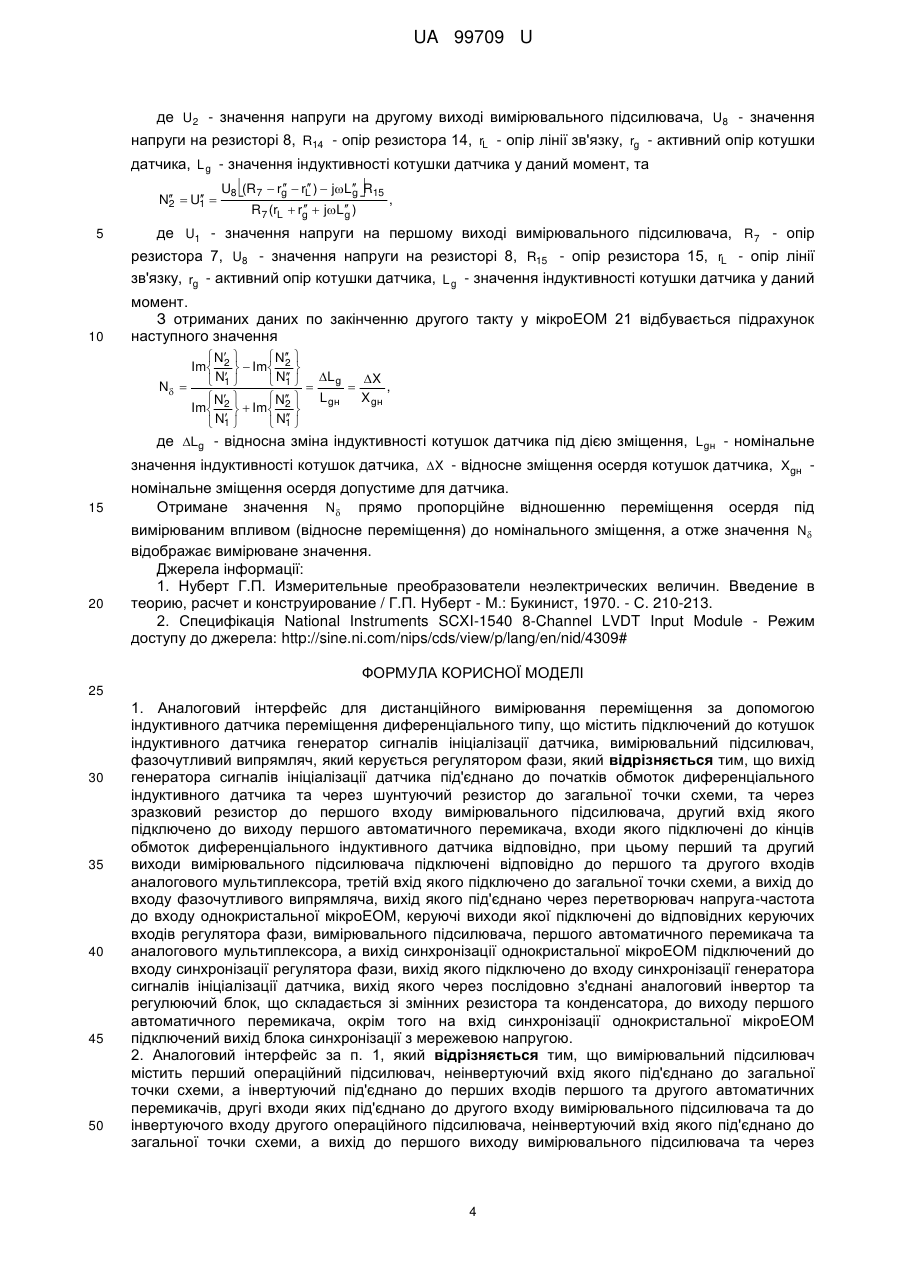
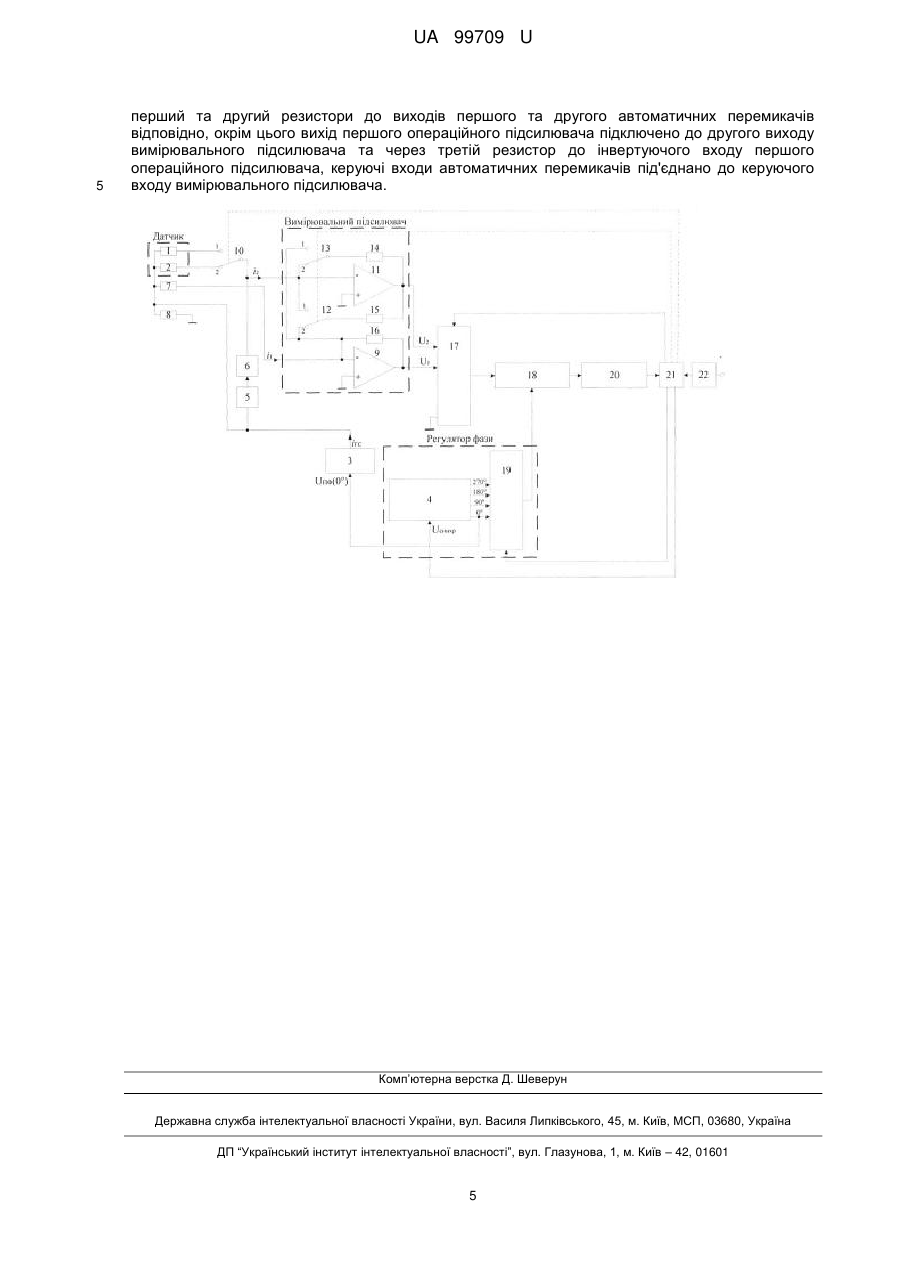
Реферат: UA 99709 U UA 99709 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області інформаційно-вимірювальної техніки, а саме до аналогових інтерфейсів, і може бути застосована у контрольно-вимірювальних системах дистанційного типу, вбудованих у різноманітні технологічні процеси загально технічного і спеціального призначення, у яких первинними перетворювачами є індуктивні датчики переміщення диференціального типу та існує потреба дистанційного вимірювання. Відомі аналогічні технічні рішення із використанням диференційно-мостових схем [1], у яких температурну похибку пропонується компенсувати за рахунок використання термозалежних резисторів та регулювання їх номіналів. У такій схемі необхідно зміщення початкового рівня проводити за межами вимірювального ланцюга (найбільш поширеною реалізацією такого методу є технологія TEDS (Transducer Electronic Data Sheet, з англ. електронна специфікація перетворювача) фірми National Instruments). Це призводить до необхідності стабілізації амплітуди струму через датчик та виділення падіння напруги на самому датчику. Такі умови потребують використання ідентичних резисторів, що можливе лише з певною часткою точності. Також такі умови ставлять під сумнів можливість дистанційного використання такої схеми, а у випадку використання TEDS призводить ще й до часового дрейфу. Також відомо аналогічне технічне рішення з підвищення чутливості індуктивного датчика шляхом підлаштування параметрів датчика під параметри лінії зв'язку або ж приєднання ємності паралельно до нього. Однак таке рішення має істотний недолік - при достатньо високих частотах вона входить у резонанс, що вносить обмеження у можливості застосування такого датчика, особливо у промислових сферах, де висока чутливість та широкий діапазон є одними з головних вимог. Також попереднє калібрування, що спирається на параметри лінії зв'язку і т.п. потребує періодичного повторення, що зменшує ступінь довіри до такого датчика у проміжки часу між цими калібруваннями. Найближчим за технічною суттю до запропонованого технічного рішення є індуктивний диференційний датчик переміщення, що являє собою мостову схему, що складається з двох котушок та двох резисторів [2]. На входи такої схеми подається вихід генератора коливань, а на вихід під'єднано підсилювач. Переміщення спільної серцевини в котушках викликає зміну імпедансу, що пропорційна зміні індуктивності. Синхронний детектор на виході підсилювача, фаза якого керується фазою сигналу з генератора коливань, дозволяє визначити ці зміни та дає можливість, за допомогою градуювальних характеристик (найпоширенішим рішенням є вже згадані вище TEDS) визначити переміщення серцевини датчика відносно положення рівноваги моста. Однак така реалізація має ряд недоліків, зокрема високі вимоги до підбору та експлуатації елементів мостової схеми, адже саме від точності відношення їх показників залежить точність вихідних даних датчика. В основу корисної моделі поставлена задача розробити аналоговий інтерфейс для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу, у якому зменшено вплив синфазної складової корисного сигналу на точність вимірювання, враховано вплив температури оточуючого середовища на чутливість датчика і відповідно підвищено точність аналогового інтерфейсу. Поставлена задача вирішується тим, що у аналоговому інтерфейсі для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу, згідно з корисною моделлю, вихід генератора сигналів ініціалізації датчика під'єднано до початків обмоток диференціального індуктивного датчика та через шунтуючий резистор до загальної точки схеми, та через зразковий резистор до першого входу вимірювального підсилювача, другий вхід якого підключено до виходу першого автоматичного перемикача, входи якого підключені до кінців обмоток диференціального індуктивного датчика відповідно, при цьому перший та другий виходи вимірювального підсилювача підключені відповідно до першого та другого входів аналогового мультиплексора, третій вхід якого підключено до загальної точки схеми, а вихід до входу фазочутливого випрямляча, вихід якого під'єднано через перетворювач напруга-частота до входу одно кристальної мікроЕОМ, керуючі виходи якої підключені до відповідних керуючих входів регулятора фази, вимірювального підсилювача, першого автоматичного перемикача та аналогового мультиплексора, а вихід синхронізації однокристальної мікроЕОМ підключений до входу синхронізації регулятора фази, вихід якого підключено до входу синхронізації генератора сигналів ініціалізації датчика, вихід якого через послідовно з'єднані аналоговий інвертор та регулюючий блок, що складається зі змінних резистора та конденсатора, до виходу першого автоматичного перемикача, окрім того на вхід синхронізації однокристальної мікроЕОМ підключений вихід блока синхронізації з мережевою напругою. Також, згідно з корисною моделлю, вимірювальний підсилювач містить перший операційний підсилювач, неінвертуючий вхід якого під'єднано до загальної точки схеми, а інвертуючий 1 UA 99709 U 5 10 15 20 25 30 35 40 45 50 55 60 під'єднано до перших входів першого та другого автоматичних перемикачів, другі входи яких під'єднано до другого входу вимірювального підсилювача та до інвертуючого входу другого операційного підсилювача, неінвертуючий вхід якого під'єднано до загальної точки схеми, а вихід до першого виходу вимірювального підсилювача та через перший та другий резистори до виходів першого та другого автоматичних перемикачів відповідно, окрім цього вихід першого операційного підсилювача підключено до другого виходу вимірювального підсилювача та через третій резистор до інвертуючого входу першого операційного підсилювача, керуючі входи автоматичних перемикачів під'єднано до керуючого входу вимірювального підсилювача. Суть корисної моделі пояснюють креслення. На кресленні наведено: Структурна схема аналогового інтерфейсу для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу. Позиції на кресленнях відповідають наступним елементам: 1 і 2 - дві котушки, що становлять індукційний датчик переміщення; 3 - генератор сигналів ініціалізації датчика; 4 - подільник-фазорозщіплювач; 5 - інвертор; 6 - регулюючий блок; 7 - зразковий резистор; 8 - шунтуючий резистор; 9 - перший операційний підсилювач; 10 - автоматичний перемикач; 11 - другий операційний підсилювач; 12 та 13 - автоматичні перемикачі у складі вимірювального підсилювача; 14, 15 та 16 - резистори; 17 - аналоговий мультиплексор; 18 - фазочутливий випрямляч; 19 - цифровий мультиплексор; 20 - перетворювач напруга-частота; 21 - однокристальна мікроЕОМ; 22 - блок синхронізації з мережевою напругою. Аналоговий інтерфейс для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу містить безпосередньо індуктивний датчик переміщення, що складається з двох ідентичних за параметрами котушок 1 та 2, підключених паралельно, взаємоіндукція яких дорівнює нулю. При цьому можливе використання як диференціальних індуктивних датчиків плунжерного типу, так і струмо-вихрових індуктивних датчиків. Струм живлення подається від генератора сигналів ініціалізації датчика 3, вихідний сигнал якого отримується шляхом перетворення напруги з виходу подільникафазорозщіплювача 4 з нульовою фазою. За допомогою інвертора 5, на вхід якого поданий струм з генератора сигналів ініціалізації датчика 3, та регулюючого блока 6 (що являє собою резистор змінного опору та конденсатор змінної ємності) стає можливим позбавитися від похибок, пов'язаних із паразитними ємностями. Окрім датчика та інвертора, вихід генератора сигналів ініціалізації датчика 3 підведений до зразкового резистора 7 та до загальної точки схеми через шунтуючий резистор 8. Вихід зразкового резистора під'єднаний до другого входу вимірювального підсилювача, а саме до негативного входу операційного підсилювача 9. Сигнали з виходів індуктивного датчика подаються на автоматичний перемикач 10, вихід якого підведений до негативного входу другого операційного підсилювача 11. Позитивні входи операційних підсилювачів 9 та 11 поєднані із загальною точкою схеми. Вихідний сигнал з автоматичного перемикача 10 також подається на перший вхід автоматичного перемикача 12 та другий вхід автоматичного перемикача 13. Інші входи автоматичних перемикачів 12 та 13 поєднані між собою та із негативним зворотнім зв'язком операційного підсилювача 9. Операційні підсилювачі 9 та 11 разом із автоматичними перемикачами 10 та 12, та резисторами 14, 15, 16 утворюють собою схему вимірювального підсилювача із можливістю калібрування та корекцією похибки неідентичності резисторів 13 та 14. На вхід аналогового мультиплексора 17 подаються сигнали з виходу попереднього каскаду вимірювального підсилювача (вихід операційного підсилювача 9) та з виходу вимірювального підсилювача (вихід операційного підсилювача 11). Третій вхід аналогового мультиплексора 17 поєднано із загальною точкою схеми. 2 UA 99709 U 5 10 15 20 25 Вихідний сигнал аналогового мультиплексора 17 подається на вхід фазочутливого випрямляча 18, на керуючий вхід якого подається сигнал з регулятора фази, що складається з цифрового мультиплексора 19, на входи якого подано чотири виходи подільникафазорозщіплювача 4 (фази виходів: 0°, 90°, 180°, 270°). Вихідний сигнал фазочутливого випрямляча 18 надходить на вхід перетворювача напругачастота 20, який передає отриману у результаті перетворення частоту на вхід однокристальної мікро-ЕОМ 21. Також на вхід мікро-ЕОМ 21 подається сигнал з блока синхронізації з мережевою напругою 22, який поєднано безпосередньо з мережею живлення. Мікро-ЕОМ 21 подає окремі сигнали управління на аналоговий мультиплексор 17, на цифровий мультиплексор 19, та на автоматичні перемикачі 10, 12 та 13, а також синхронізуючий сигнал на вхід подільника-фазорозщіплювача. Генератор струму 3 складається з перетворювача прямокутної напруги (що надходить з подільника-фазорозщіплювача 4) у трикутну, перетворювача трикутної напруги у квазісинусоїдальну, фільтра нижніх частот та перетворювача напруги у струм, поєднаних послідовно (на схемі не позначено). Схема працює у два такти, кожен з яких можна поділити на два під-такти. Тривалість кожного такту відповідає частоті мережевої напруги і синхронізується з нею за допомогою блока 22. У першому такті положення автоматичного перемикача 10-1, автоматичних перемикачів 12 та 13-2. У такому положенні на входи цифрового мультиплексора 17 надходять дані, зняті з першої котушки 1 датчика. У середині першого такту автоматичні перемикачі 12 та 13 за сигналом від мікроЕОМ переходять у положення 1. Внаслідок цього резистори 14 та 15 віртуально міняються місцями у схемі, з метою нівелювання можливої похибки спричиненої неідентичністю даних резисторів. По закінченню першого такту у мікроЕОМ відбувається збереження наступних даних: N1 U 2 UшR14 ш , rL rg jL g де U2 - значення напруги на другому виході вимірювального підсилювача, Uш - напруга на вході датчика, R14 - опір резистора 14, rL - опір лінії зв'язку, rg - значення опору котушки 30 датчика під час виконання вимірювання, L g - значення індуктивності котушки датчика під час виконання вимірювання, ш - адитивна похибка схеми, та N U1 2 Uш (R7 rg rL ) jL R15 g R7 (rL rg jL ) g ш , де U1 - значення напруги на першому виході вимірювального підсилювача, R7 - опір резистора 7, Uш - напруга на вході датчика, R15 - опір резистора 15, rL - опір лінії зв'язку, rg 35 значення опору котушки датчика під час виконання вимірювання, L g - значення індуктивності котушки датчика під час виконання вимірювання, ш - адитивна похибка схеми. N3 ш, де ш - адитивна похибка схеми. В обох тактах значення N1 відповідає виходу з попереднього каскаду вимірювального 40 45 підсилювача, N2 - виходу з другого каскаду вимірювального підсилювача. N3 - значення, що надходить на мікроЕОМ 21 при встановленні нуля на вході датчика. Значення N3 являє собою адитивну похибку схеми. Зняття значення N3 відбувається за заздалегідь визначеним графіком повірок і не потребує повторення протягом коротких проміжків часу. У другому такті положення автоматичного перемикача 10-2, автоматичних перемикачів 12 та 13-1. У такому положенні на входи цифрового мультиплексора 17 надходять дані, зняті з другої котушки 2 датчика. У середині другого такту автоматичні перемикачі 12 та 13 за сигналом від мікроЕОМ 21 переходять у положення 2 з тією ж метою, що і в першому такті. По закінченню другого такту у мікроЕОМ відбувається збереження наступних даних: N1 U 2 U8R14 , rL rg jL g 3 UA 99709 U де U2 - значення напруги на другому виході вимірювального підсилювача, U8 - значення напруги на резисторі 8, R14 - опір резистора 14, rL - опір лінії зв'язку, rg - активний опір котушки датчика, L g - значення індуктивності котушки датчика у даний момент, та N U1 2 5 U8 (R7 rg rL ) jL R15 g R7 (rL rg jL ) g , де U1 - значення напруги на першому виході вимірювального підсилювача, R7 - опір резистора 7, U8 - значення напруги на резисторі 8, R15 - опір резистора 15, rL - опір лінії зв'язку, rg - активний опір котушки датчика, L g - значення індуктивності котушки датчика у даний 10 момент. З отриманих даних по закінченню другого такту у мікроЕОМ 21 відбувається підрахунок наступного значення N N Im 2 Im 2 N1 N1 L g X , N X gн N N L gн Im 2 Im 2 N1 N1 де Lg - відносна зміна індуктивності котушок датчика під дією зміщення, L gн - номінальне значення індуктивності котушок датчика, X - відносне зміщення осердя котушок датчика, Xgн 15 20 номінальне зміщення осердя допустиме для датчика. Отримане значення N прямо пропорційне відношенню переміщення осердя під вимірюваним впливом (відносне переміщення) до номінального зміщення, а отже значення N відображає вимірюване значення. Джерела інформації: 1. Нуберт Г.П. Измерительные преобразователи неэлектрических величин. Введение в теорию, расчет и конструирование / Г.П. Нуберт - М.: Букинист, 1970. - С. 210-213. 2. Специфікація National Instruments SCXI-1540 8-Channel LVDT Input Module - Режим доступу до джерела: http://sine.ni.com/nips/cds/view/p/lang/en/nid/4309# ФОРМУЛА КОРИСНОЇ МОДЕЛІ 25 30 35 40 45 50 1. Аналоговий інтерфейс для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу, що містить підключений до котушок індуктивного датчика генератор сигналів ініціалізації датчика, вимірювальний підсилювач, фазочутливий випрямляч, який керується регулятором фази, який відрізняється тим, що вихід генератора сигналів ініціалізації датчика під'єднано до початків обмоток диференціального індуктивного датчика та через шунтуючий резистор до загальної точки схеми, та через зразковий резистор до першого входу вимірювального підсилювача, другий вхід якого підключено до виходу першого автоматичного перемикача, входи якого підключені до кінців обмоток диференціального індуктивного датчика відповідно, при цьому перший та другий виходи вимірювального підсилювача підключені відповідно до першого та другого входів аналогового мультиплексора, третій вхід якого підключено до загальної точки схеми, а вихід до входу фазочутливого випрямляча, вихід якого під'єднано через перетворювач напруга-частота до входу однокристальної мікроЕОМ, керуючі виходи якої підключені до відповідних керуючих входів регулятора фази, вимірювального підсилювача, першого автоматичного перемикача та аналогового мультиплексора, а вихід синхронізації однокристальної мікроЕОМ підключений до входу синхронізації регулятора фази, вихід якого підключено до входу синхронізації генератора сигналів ініціалізації датчика, вихід якого через послідовно з'єднані аналоговий інвертор та регулюючий блок, що складається зі змінних резистора та конденсатора, до виходу першого автоматичного перемикача, окрім того на вхід синхронізації однокристальної мікроЕОМ підключений вихід блока синхронізації з мережевою напругою. 2. Аналоговий інтерфейс за п. 1, який відрізняється тим, що вимірювальний підсилювач містить перший операційний підсилювач, неінвертуючий вхід якого під'єднано до загальної точки схеми, а інвертуючий під'єднано до перших входів першого та другого автоматичних перемикачів, другі входи яких під'єднано до другого входу вимірювального підсилювача та до інвертуючого входу другого операційного підсилювача, неінвертуючий вхід якого під'єднано до загальної точки схеми, а вихід до першого виходу вимірювального підсилювача та через 4 UA 99709 U 5 перший та другий резистори до виходів першого та другого автоматичних перемикачів відповідно, окрім цього вихід першого операційного підсилювача підключено до другого виходу вимірювального підсилювача та через третій резистор до інвертуючого входу першого операційного підсилювача, керуючі входи автоматичних перемикачів під'єднано до керуючого входу вимірювального підсилювача. Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G06F 13/00
Мітки: типу, диференціального, допомогою, індуктивного, переміщення, аналоговий, дистанційного, вимірювання, датчика, інтерфейс
Код посилання
<a href="https://ua.patents.su/7-99709-analogovijj-interfejjs-dlya-distancijjnogo-vimiryuvannya-peremishhennya-za-dopomogoyu-induktivnogo-datchika-peremishhennya-diferencialnogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Аналоговий інтерфейс для дистанційного вимірювання переміщення за допомогою індуктивного датчика переміщення диференціального типу</a>
Аналоговий інтерфейс для інформаційно-вимірювальної системи з індуктивними датчиками переміщення
Номер патенту: 78475
Опубліковано: 25.03.2013
Автори: Харченко Володимир Петрович, Осмоловський Олександр Іванович, Ільченко Володимир Миколайович, Кулик Микола Сергійович, Орнатський Дмитро Петрович, Квасніков Володимир Павлович
МПК: G06F 3/00, G06F 13/00
Мітки: інформаційно-вимірювальної, переміщення, датчиками, системі, індуктивними, аналоговий, інтерфейс
Формула / Реферат:
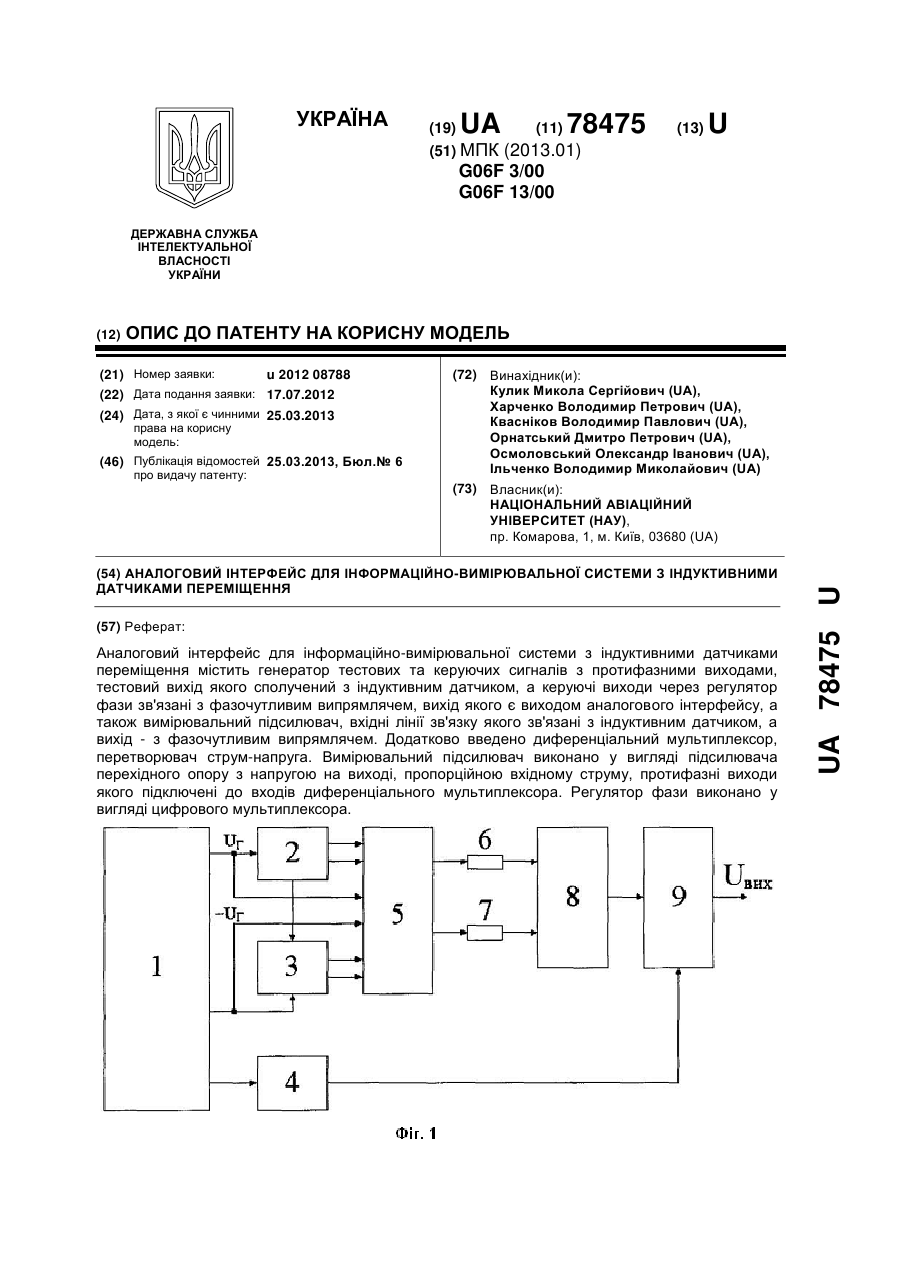
1. Аналоговий інтерфейс для інформаційно-вимірювальної системи з індуктивними датчиками переміщення, що містить генератор тестових та керуючих сигналів з протифазними виходами, тестовий вихід якого сполучений з індуктивним датчиком, а керуючі виходи через регулятор фази зв'язані з фазочутливим випрямлячем, вихід якого є виходом аналогового інтерфейсу, а також вимірювальний підсилювач, вхідні лінії зв'язку якого зв'язані з індуктивним...
Аналоговий інтерфейс для багатоточкової інформаційно-вимірювальної системи централізованого типу
Номер патенту: 70406
Опубліковано: 15.10.2004
Автори: Олянишин Олег Олексійович, Квашина Ольга Петрівна, Котляр Володимир Семенович, Орнатський Дмитро Петрович
МПК: G06F 3/048, G06J 3/00, G06F 13/00
Мітки: типу, багатоточкової, інтерфейс, централізованого, інформаційно-вимірювальної, аналоговий, системі
Формула / Реферат:
Аналоговий інтерфейс для багатоточкової інформаційно-вимірювальної системи централізованого типу, що містить n перетворювачів струм/напруга, входи яких зв'язані з точками вимірів - датчиками з струмовими виходами, а виходи - з входами мультиплексора, мікропроцесор, аналого-цифровий перетворювач (АЦП), мережний блок живлення і блок оптичної розв'язки, вихід якого є виходом інтерфейсу, причому керуючі входи мультиплексора і входи/виходи АЦП...
Трипровідний аналоговий інтерфейс
Номер патенту: 74738
Опубліковано: 16.01.2006
Автори: Бабак Віталій Павлович, Орнатський Дмитро Петрович
МПК: G06F 3/048, G06F 3/00, G06F 13/00
Мітки: трипровідний, інтерфейс, аналоговий
Формула / Реферат:
1. Трипровідний аналоговий інтерфейс для багатоточкової інформаційно-вимірювальної системи централізованого типу, що містить n перетворювачів струм/напруга (4), входи яких зв'язані з точками вимірів - датчиками (1), а виходи - з входами мультиплексора (5), мікропроцесор (7), аналого-цифровий перетворювач (АЦП) (6), ізольований блок живлення (9) і блок оптичної розв'язки (8), вихід якого є виходом інтерфейсу, причому керуючі входи...
Аналоговий інтерфейс для сполучення первинних перетворювачів з мікро-еом, вимірювальний перетворювач і двотактний підсилювач потужності для використання у інтерфейсі
Номер патенту: 68451
Опубліковано: 16.08.2004
Автор: Орнатський Дмитро Петрович
МПК: G01R 27/00, H03F 3/00, H04L 12/66
Мітки: вимірювальний, потужності, первинних, інтерфейсі, мікро-еом, інтерфейс, сполучення, використання, перетворювачів, підсилювач, двотактний, аналоговий, перетворювач
Формула / Реферат:
1. Аналоговий інтерфейс для сполучення первинних перетворювачів із процесором, що містить приймальну і передавальну частини, зв'язані між собою двопровідною лінією зв'язку, причому передавальна частина містить вимірювальний перетворювач, що перетворює вимірюваний параметр у частоту/період, і двотактний підсилювач потужності, а приймальна частина - систему фазового автопідстроювання частоти (ФАПЧ), а також включені на вході приймальної частини...
Пристрій для підсилювання сигналів датчика наявності вагона на колії
Номер патенту: 18574
Опубліковано: 15.11.2006
Автор: Снітовський Володимир Михайлович
МПК: H03K 3/023
Мітки: пристрій, підсилювання, сигналів, колії, датчика, наявності, вагона
Формула / Реферат:
1. Пристрій для підсилювання сигналів датчика наявності вагона на колії, що включає принаймні один канал 1К датчика Д і принаймні один операційний підсилювач ОП1 сигналу датчика, який відрізняється тим, що датчик наявності вагона на колії має другий аналогічний канал 2К, до якого своїм першим входом підключений другий аналогічний операційний підсилювач ОП2 сигналу датчика, а останній своїм виходом підключений через вузол заборони В3 до...
Попередній патент: Пристрій для отримання крові з судин порожнистих органів “шприц в собі”
Наступний патент: Пристрій визначення моменту торкання різального інструмента до поверхні деталі
Випадковий патент: Кластерний спосіб навчання нейронної мережі