Спосіб визначення орієнтації космічного апарата
Номер патенту: 104831
Опубліковано: 11.03.2014
Автори: Кузнєцов Юрій Олексійович, Плаксій Юрій Андрійович, Лабазов Олег Олександрович, Олійник Сергій Вікторович
Формула / Реферат
Спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями за такт розрахунку обчислюють половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що обчислюють шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт, при цьому початкове значення кватерніона орієнтації космічного апарата визначають за вимірами астродатчиків, який відрізняється тим, що додатково на парних тактах вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями обчислюють додатковий кватерніон повороту за два такти шляхом додавання до одиниці половини приросту вектора кута повороту за два такти, на цих же парних тактах обчислюють додатковий кватерніон орієнтації шляхом кватерніонного множення попереднього значення додаткового кватерніона орієнтації на додатковий кватерніон повороту за два такти, при цьому за початкове значення додаткового кватерніона орієнтації приймають початкове значення кватерніона орієнтації, також на парних тактах обчислюють корегуючий кватерніон як третину різницевого кватерніона між кватерніоном орієнтації і відповідним додатковим кватерніоном орієнтації, потім на парних тактах визначають нове значення кватерніона орієнтації шляхом додавання до кватерніона орієнтації корегуючого кватерніона, а додатковому кватерніону орієнтації присвоюють нове значення кватерніона орієнтації космічного апарата.
Текст
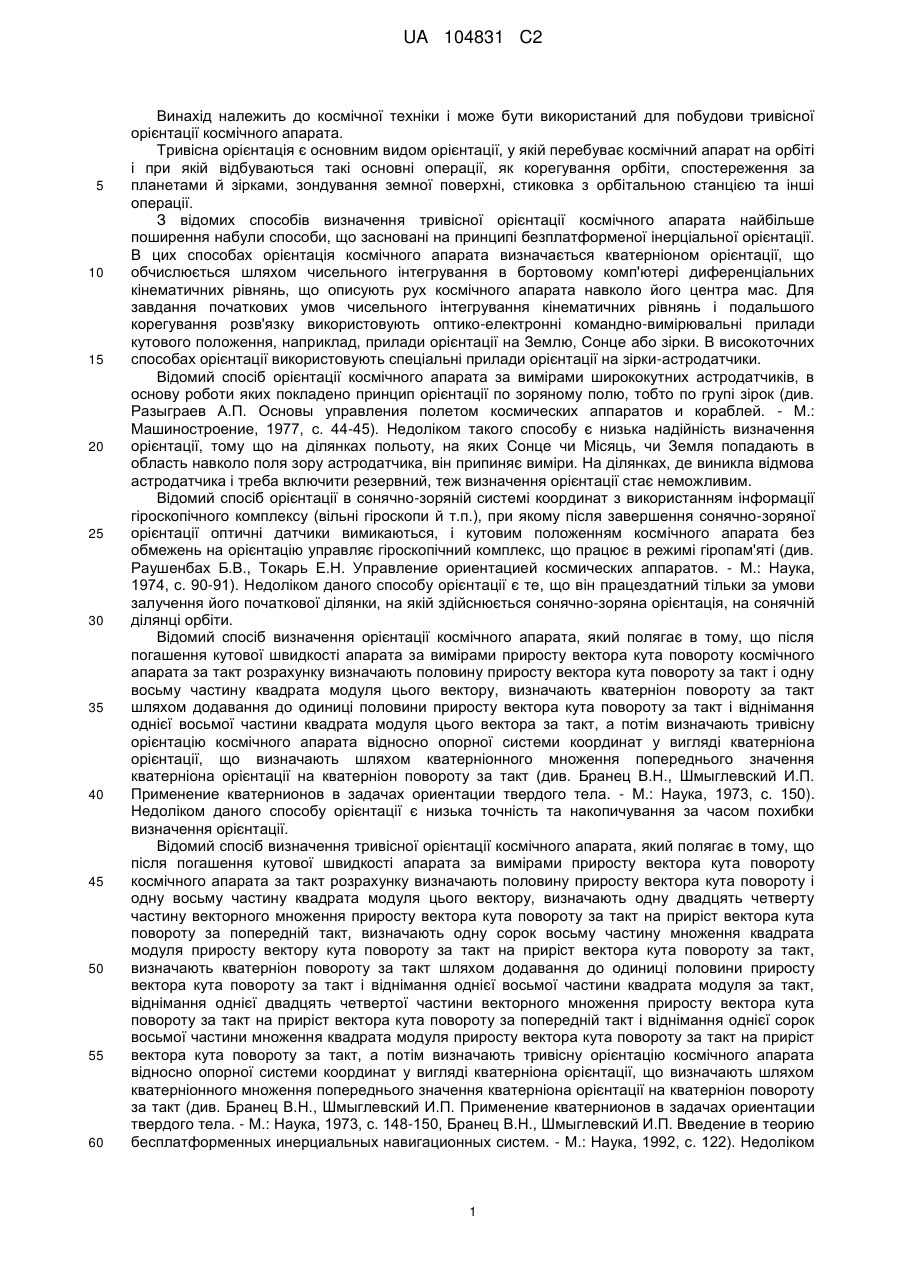
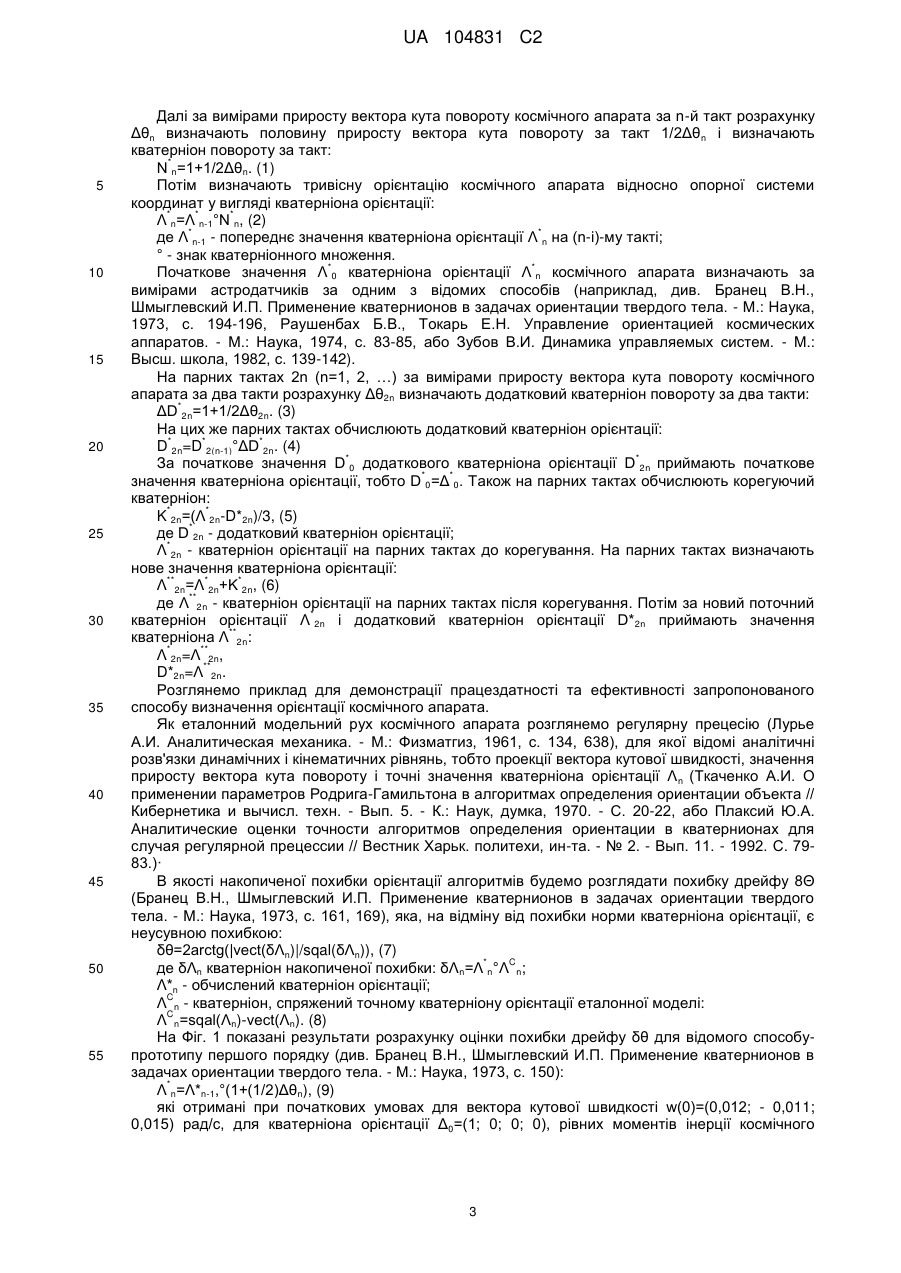
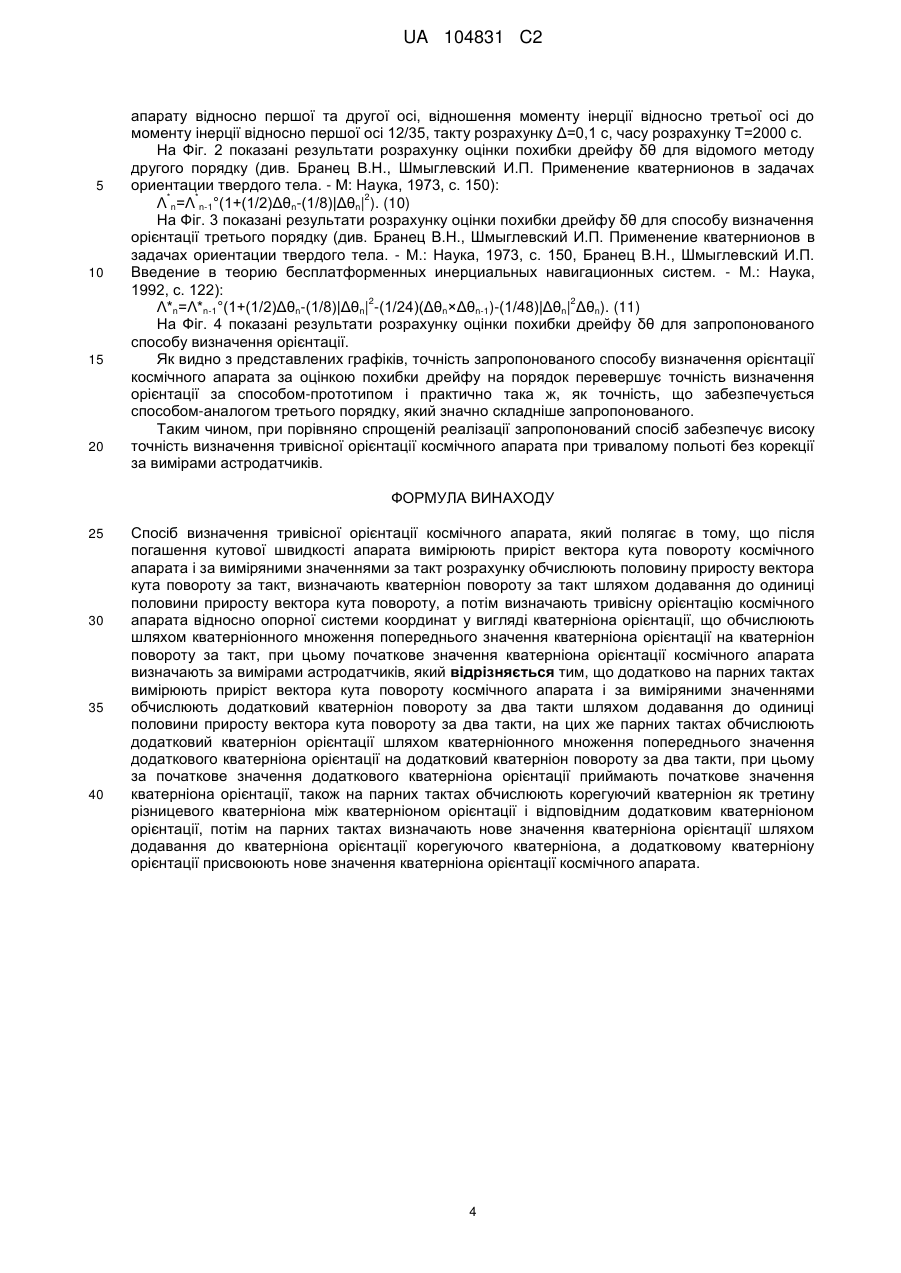
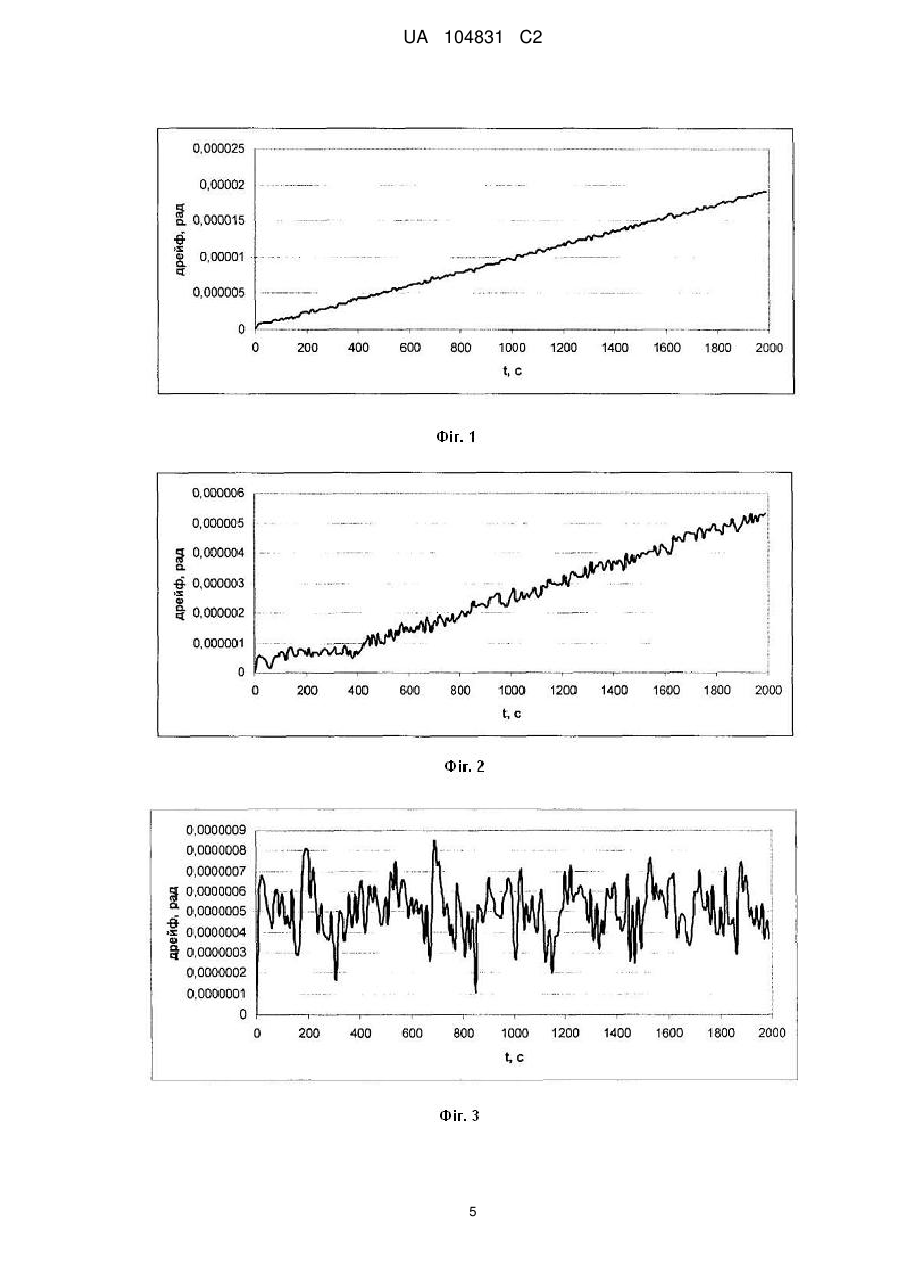
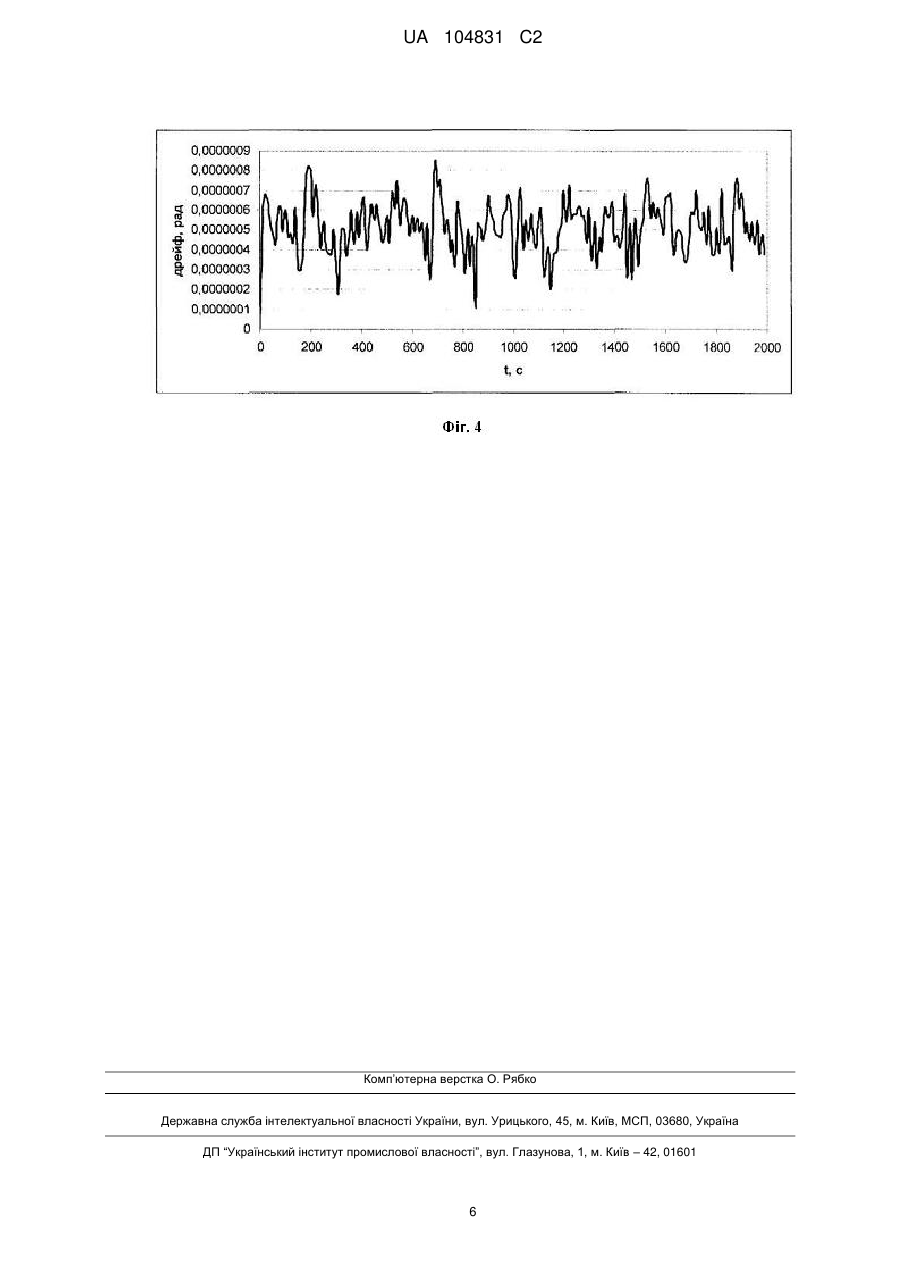
Реферат: Винахід належить до галузі космічної техніки. Спосіб визначення тривісної орієнтації космічного апарата, полягає в тому, що після погашення кутової швидкості апарата обчислюють половину приросту вектора кута повороту за такт. Після чого визначають кватерніон повороту за такт, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що обчислюють шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт. При цьому початкове значення кватерніона орієнтації космічного апарата визначають за вимірами астродатчиків, а додатково UA 104831 C2 (12) UA 104831 C2 на парних тактах обчислюють додатковий кватерніон повороту за два такти. На цих же парних тактах обчислюють додатковий кватерніон орієнтації шляхом кватерніонного множення попереднього значення додаткового кватерніона орієнтації на додатковий кватерніон повороту за два такти. При цьому за початкове значення додаткового кватерніона орієнтації приймають початкове значення кватерніона орієнтації. Також на парних тактах обчислюють корегуючий кватерніон як третину різницевого кватерніона між кватерніоном орієнтації і відповідним додатковим кватерніоном орієнтації. Потім на парних тактах визначають нове значення кватерніона орієнтації шляхом додавання до кватерніона орієнтації корегуючого кватерніона, а додатковому кватерніону орієнтації присвоюють нове значення кватерніона орієнтації космічного апарата. Технічним результатом винаходу є забезпечення високої точності визначення тривісної орієнтації космічного апарата при тривалому польоті без корекції за вимірами астродатчиків. UA 104831 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до космічної техніки і може бути використаний для побудови тривісної орієнтації космічного апарата. Тривісна орієнтація є основним видом орієнтації, у якій перебуває космічний апарат на орбіті і при якій відбуваються такі основні операції, як корегування орбіти, спостереження за планетами й зірками, зондування земної поверхні, стиковка з орбітальною станцією та інші операції. З відомих способів визначення тривісної орієнтації космічного апарата найбільше поширення набули способи, що засновані на принципі безплатформеної інерціальної орієнтації. В цих способах орієнтація космічного апарата визначається кватерніоном орієнтації, що обчислюється шляхом чисельного інтегрування в бортовому комп'ютері диференціальних кінематичних рівнянь, що описують рух космічного апарата навколо його центра мас. Для завдання початкових умов чисельного інтегрування кінематичних рівнянь і подальшого корегування розв'язку використовують оптико-електронні командно-вимірювальні прилади кутового положення, наприклад, прилади орієнтації на Землю, Сонце або зірки. В високоточних способах орієнтації використовують спеціальні прилади орієнтації на зірки-астродатчики. Відомий спосіб орієнтації космічного апарата за вимірами ширококутних астродатчиків, в основу роботи яких покладено принцип орієнтації по зоряному полю, тобто по групі зірок (див. Разыграев А.П. Основы управления полетом космических аппаратов и кораблей. - М.: Машиностроение, 1977, с. 44-45). Недоліком такого способу є низька надійність визначення орієнтації, тому що на ділянках польоту, на яких Сонце чи Місяць, чи Земля попадають в область навколо поля зору астродатчика, він припиняє виміри. На ділянках, де виникла відмова астродатчика і треба включити резервний, теж визначення орієнтації стає неможливим. Відомий спосіб орієнтації в сонячно-зоряній системі координат з використанням інформації гіроскопічного комплексу (вільні гіроскопи й т.п.), при якому після завершення сонячно-зоряної орієнтації оптичні датчики вимикаються, і кутовим положенням космічного апарата без обмежень на орієнтацію управляє гіроскопічний комплекс, що працює в режимі гіропам'яті (див. Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - Μ.: Наука, 1974, с. 90-91). Недоліком даного способу орієнтації є те, що він працездатний тільки за умови залучення його початкової ділянки, на якій здійснюється сонячно-зоряна орієнтація, на сонячній ділянці орбіти. Відомий спосіб визначення орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата за вимірами приросту вектора кута повороту космічного апарата за такт розрахунку визначають половину приросту вектора кута повороту за такт і одну восьму частину квадрата модуля цього вектору, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту за такт і віднімання однієї восьмої частини квадрата модуля цього вектора за такт, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що визначають шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 150). Недоліком даного способу орієнтації є низька точність та накопичування за часом похибки визначення орієнтації. Відомий спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата за вимірами приросту вектора кута повороту космічного апарата за такт розрахунку визначають половину приросту вектора кута повороту і одну восьму частину квадрата модуля цього вектору, визначають одну двадцять четверту частину векторного множення приросту вектора кута повороту за такт на приріст вектора кута повороту за попередній такт, визначають одну сорок восьму частину множення квадрата модуля приросту вектору кута повороту за такт на приріст вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту за такт і віднімання однієї восьмої частини квадрата модуля за такт, віднімання однієї двадцять четвертої частини векторного множення приросту вектора кута повороту за такт на приріст вектора кута повороту за попередній такт і віднімання однієї сорок восьмої частини множення квадрата модуля приросту вектора кута повороту за такт на приріст вектора кута повороту за такт, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що визначають шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 148-150, Бранец В.Η., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М.: Наука, 1992, с. 122). Недоліком 1 UA 104831 C2 5 10 15 20 25 30 35 40 45 50 55 даного способу орієнтації є його обчислювальна складність, що пред'являє до ресурсів бортового обчислювача, який реалізує цей спосіб, достатньо жорсткі вимоги. Відомий спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що визначають кватерніон повороту за такт у вигляді половини кватерніонного множення попереднього значення кватерніона орієнтації на виміри приросту вектора кута повороту космічного апарата за такт, потім визначають поточний кватерніон тривісної орієнтації космічного апарата відносно опорної системи координат шляхом додавання до попереднього значення кватерніона орієнтації обчисленого кватерніона повороту за такт. Всі розрахунки виконують за реверсивною схемою, яка полягає в тому, що при обчисленні компонент кватерніона повороту за такт в розрахункові формули для кожної компоненти підставляють вже обчислені значення попередніх компонент цього кватерніона. При цьому на додатних тактах розрахунку послідовність обчислень компонент кватерніона повороту змінюється на протилежну (див. Ткаченко А.И. Повышение точности вычисления кинематических параметров // Кибернетика и вычисл. техн. - Вып. 19. - К.: Наук, думка, 1973. - С. 117-121). Недоліком даного способу орієнтації є невисока його точність та швидке накопичування за часом похибки визначення орієнтації. Відомий найбільш близький за технічною суттю спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата за вимірами приросту вектора кута повороту космічного апарата за такт розрахунку визначають половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту за такт, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що визначають шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт, при цьому початкове значення кватерніона орієнтації космічного апарата визначають за вимірами астродатчиків (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 150, с. 194-196, Бранец В.Η., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М: Наука, 1992, с. 122). Недоліком даного способу орієнтації є низька його точність та швидке накопичування за часом похибки визначення орієнтації, що не дає можливості використовувати цей спосіб при необхідності функціонування системи орієнтації космічного апарата тривалий час без астрокорегування. Задачею пропонованого винаходу є забезпечення високої точності визначення тривісної орієнтації космічного апарата при тривалому польоті без корекції за вимірами астродатчиків. Поставлена задача вирішується тим, що у відомому способі тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата за вимірами приросту вектора кута повороту космічного апарата за такт розрахунку обчислюють половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що обчислюють шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт, при цьому початкове значення кватерніона орієнтації космічного апарата визначають за вимірами астродатчиків, згідно з винаходом додатково на парних тактах за вимірами приросту вектора кута повороту космічного апарата за два такти розрахунку обчислюють додатковий кватерніон повороту за два такти шляхом додавання до одиниці половини приросту вектора кута повороту за два такти, на цих же парних тактах обчислюють додатковий кватерніон орієнтації шляхом кватерніонного множення попереднього значення додаткового кватерніона орієнтації на додатковий кватерніон повороту за два такти, при цьому за початкове значення додаткового кватерніона орієнтації приймають початкове значення кватерніона орієнтації, також на парних тактах обчислюють корегуючий кватерніон як третину різницевого кватерніона між кватерніоном орієнтації і відповідним додатковим кватерніоном орієнтації, потім на парних тактах визначають нове значення кватерніона орієнтації шляхом додавання до кватерніона орієнтації корегуючого кватерніона, а додатковому кватерніону орієнтації присвоюють нове значення кватерніона орієнтації космічного апарата. Суть винаходу пояснюється наступним. Погашення кутової швидкості космічного апарата виконують за одним з відомих способів (наприклад, див. Разыграев А.П. Основы управления полетом космических аппаратов и кораблей. - М.: Машиностроение, 1977, с. 121-127, або Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - М.: Наука, 1974, с. 187-189). 2 UA 104831 C2 5 10 15 20 25 30 35 40 45 50 55 Далі за вимірами приросту вектора кута повороту космічного апарата за n-й такт розрахунку Δθn визначають половину приросту вектора кута повороту за такт 1/2Δθ n і визначають кватерніон повороту за такт: * Ν n=1+1/2Δθn. (1) Потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації: * * * Λ n=Λ n-1°Ν n, (2) * * де Λ n-1 - попереднє значення кватерніона орієнтації Λ n на (n-і)-му такті; ° - знак кватерніонного множення. * * Початкове значення Λ 0 кватерніона орієнтації Λ n космічного апарата визначають за вимірами астродатчиків за одним з відомих способів (наприклад, див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 194-196, Раушенбах Б.В., Токарь Е.Н. Управление ориентацией космических аппаратов. - Μ.: Наука, 1974, с. 83-85, або Зубов В.И. Динамика управляемых систем. - М.: Высш. школа, 1982, с. 139-142). На парних тактах 2n (n=1, 2, …) за вимірами приросту вектора кута повороту космічного апарата за два такти розрахунку Δθ2n визначають додатковий кватерніон повороту за два такти: * ΔD 2n=1+1/2Δθ2n. (3) На цих же парних тактах обчислюють додатковий кватерніон орієнтації: * * * D 2n=D 2(n-1)°ΔD 2n. (4) * * За початкове значення D 0 додаткового кватерніона орієнтації D 2n приймають початкове * * значення кватерніона орієнтації, тобто D 0=Δ 0. Також на парних тактах обчислюють корегуючий кватерніон: * * K 2n=(Λ 2n-D*2n)/3, (5) * де D 2n - додатковий кватерніон орієнтації; * Λ 2n - кватерніон орієнтації на парних тактах до корегування. На парних тактах визначають нове значення кватерніона орієнтації: ** * * Λ 2n=Λ 2n+Κ 2n, (6) ** де Λ 2n - кватерніон орієнтації на парних тактах після корегування. Потім за новий поточний * кватерніон орієнтації Λ 2n і додатковий кватерніон орієнтації D*2n приймають значення ** кватерніона Λ 2n: * ** Λ 2n=Λ 2n, ** D*2n=Λ 2n. Розглянемо приклад для демонстрації працездатності та ефективності запропонованого способу визначення орієнтації космічного апарата. Як еталонний модельний рух космічного апарата розглянемо регулярну прецесію (Лурье А.И. Аналитическая механика. - Μ.: Физматгиз, 1961, с. 134, 638), для якої відомі аналітичні розв'язки динамічних і кінематичних рівнянь, тобто проекції вектора кутової швидкості, значення приросту вектора кута повороту і точні значення кватерніона орієнтації Λ n (Ткаченко А.И. О применении параметров Родрига-Гамильтона в алгоритмах определения ориентации объекта // Кибернетика и вычисл. техн. - Вып. 5. - К.: Наук, думка, 1970. - С. 20-22, або Плаксий Ю.А. Аналитические оценки точности алгоритмов определения ориентации в кватернионах для случая регулярной прецессии // Вестник Харьк. политехи, ин-та. - № 2. - Вып. 11. - 1992. С. 7983.)· В якості накопиченої похибки орієнтації алгоритмів будемо розглядати похибку дрейфу 8Θ (Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 161, 169), яка, на відміну від похибки норми кватерніона орієнтації, є неусувною похибкою: δθ=2arctg(|vect(δΛn)|/sqal(δΛn)), (7) * C де δΛn кватерніон накопиченої похибки: δΛn=Λ n°Λ n; Λ*n - обчислений кватерніон орієнтації; C Λ n - кватерніон, спряжений точному кватерніону орієнтації еталонної моделі: C Λ n=sqal(Λn)-vect(Λn). (8) На Фіг. 1 показані результати розрахунку оцінки похибки дрейфу δθ для відомого способупрототипу першого порядку (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 150): * Λ n=Λ*n-1,°(1+(1/2)Δθn), (9) які отримані при початкових умовах для вектора кутової швидкості w(0)=(0,012; - 0,011; 0,015) рад/с, для кватерніона орієнтації Δ0=(1; 0; 0; 0), рівних моментів інерції космічного 3 UA 104831 C2 5 10 15 20 апарату відносно першої та другої осі, відношення моменту інерції відносно третьої осі до моменту інерції відносно першої осі 12/35, такту розрахунку Δ=0,1 с, часу розрахунку Т=2000 с. На Фіг. 2 показані результати розрахунку оцінки похибки дрейфу δθ для відомого методу другого порядку (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - М: Наука, 1973, с. 150): * * 2 Λ n=Λ n-1°(1+(1/2)Δθn-(1/8)|Δθn| ). (10) На Фіг. 3 показані результати розрахунку оцінки похибки дрейфу δθ для способу визначення орієнтації третього порядку (див. Бранец В.Н., Шмыглевский И.П. Применение кватернионов в задачах ориентации твердого тела. - Μ.: Наука, 1973, с. 150, Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. - М.: Наука, 1992, с. 122): 2 2 Λ*n=Λ*n-1°(1+(1/2)Δθn-(1/8)|Δθn| -(1/24)(Δθn×Δθn-1)-(1/48)|Δθn| Δθn). (11) На Фіг. 4 показані результати розрахунку оцінки похибки дрейфу δθ для запропонованого способу визначення орієнтації. Як видно з представлених графіків, точність запропонованого способу визначення орієнтації космічного апарата за оцінкою похибки дрейфу на порядок перевершує точність визначення орієнтації за способом-прототипом і практично така ж, як точність, що забезпечується способом-аналогом третього порядку, який значно складніше запропонованого. Таким чином, при порівняно спрощеній реалізації запропонований спосіб забезпечує високу точність визначення тривісної орієнтації космічного апарата при тривалому польоті без корекції за вимірами астродатчиків. ФОРМУЛА ВИНАХОДУ 25 30 35 40 Спосіб визначення тривісної орієнтації космічного апарата, який полягає в тому, що після погашення кутової швидкості апарата вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями за такт розрахунку обчислюють половину приросту вектора кута повороту за такт, визначають кватерніон повороту за такт шляхом додавання до одиниці половини приросту вектора кута повороту, а потім визначають тривісну орієнтацію космічного апарата відносно опорної системи координат у вигляді кватерніона орієнтації, що обчислюють шляхом кватерніонного множення попереднього значення кватерніона орієнтації на кватерніон повороту за такт, при цьому початкове значення кватерніона орієнтації космічного апарата визначають за вимірами астродатчиків, який відрізняється тим, що додатково на парних тактах вимірюють приріст вектора кута повороту космічного апарата і за виміряними значеннями обчислюють додатковий кватерніон повороту за два такти шляхом додавання до одиниці половини приросту вектора кута повороту за два такти, на цих же парних тактах обчислюють додатковий кватерніон орієнтації шляхом кватерніонного множення попереднього значення додаткового кватерніона орієнтації на додатковий кватерніон повороту за два такти, при цьому за початкове значення додаткового кватерніона орієнтації приймають початкове значення кватерніона орієнтації, також на парних тактах обчислюють корегуючий кватерніон як третину різницевого кватерніона між кватерніоном орієнтації і відповідним додатковим кватерніоном орієнтації, потім на парних тактах визначають нове значення кватерніона орієнтації шляхом додавання до кватерніона орієнтації корегуючого кватерніона, а додатковому кватерніону орієнтації присвоюють нове значення кватерніона орієнтації космічного апарата. 4 UA 104831 C2 5 UA 104831 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюKuznietsov Yurii Oleksiiovych, Labazov Oleh Oleksandrovych
Автори російськоюКузнецов Юрий Алексеевич, Лабазов Олег Александрович
МПК / Мітки
МПК: G01C 21/24, B64G 1/24
Мітки: орієнтації, визначення, космічного, спосіб, апарата
Код посилання
<a href="https://ua.patents.su/8-104831-sposib-viznachennya-oriehntaci-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення орієнтації космічного апарата</a>
Спосіб визначення орієнтації космічного апарата
Номер патенту: 79326
Опубліковано: 25.04.2013
Автори: Кулік Анатолій Степанович, Субота Анатолій Максимович, Красножон Олександра Володимирівна
МПК: B64G 1/24
Мітки: визначення, спосіб, космічного, орієнтації, апарата
Формула / Реферат:
Спосіб визначення орієнтації космічного апарата, який полягає в тому, що параметри орієнтації космічного апарата відносно центра мас обраховують за інформацією вихідних параметрів сонячних батарей, пов'язаних з кутом Сонця відносно їх робочих поверхонь, який відрізняється тим, що як датчикові пристрої визначення орієнтації на Сонце використовують окремі елементи однієї або декількох сонячних батарей, що розташовані на однакових відстанях від...
Спосіб визначення орієнтації космічного апарата
Номер патенту: 51673
Опубліковано: 26.07.2010
Автори: Кучерук Сергій Михайлович, Загорулько Олександр Миколайович, Козелкова Катерина Сергіївна, Костенко Борис Олександрович, Ян Ке
МПК: B64G 1/24
Мітки: апарата, спосіб, визначення, орієнтації, космічного
Формула / Реферат:
Спосіб визначення орієнтації космічного апарата (КА), який полягає в тому, що параметри орієнтації КА відносно центра мас обраховують за інформацією вихідної потужності панелей сонячних батарей, пов'язаної з кутом Сонця відносно їх робочих поверхонь, який відрізняється тим, що як датчикові пристрої використовують сонячні батареї, розміщені в трьох ортогональних площинах.
Спосіб тривісної орієнтації космічного апарата
Номер патенту: 82937
Опубліковано: 26.05.2008
Автори: Кузнєцов Юрій Олексійович, Ковальов Сергій Онисимович, Лабазов Олег Олександрович
МПК: B64G 1/24, G01C 21/24
Мітки: спосіб, космічного, орієнтації, апарата, тривісної
Формула / Реферат:
Спосіб тривісної орієнтації космічного апарата, який полягає в тому, що за вимірами двох нерухомо зв'язаних з двома осями зв'язаної з космічним апаратом системи координат астродатчиків визначають напрямні косинуси двох зірок у зв'язаній системі координат, а потім, обчисливши за даними зоряного каталогу напрямні косинуси зірок в опорній системі координат, визначають тривісну орієнтацію космічного апарата відносно опорної системи координат,...
Спосіб орієнтації сонячних батарей космічного апарата на сонце
Номер патенту: 51710
Опубліковано: 26.07.2010
Автори: Ян Ке, Козелкова Катерина Сергіївна, Костенко Борис Олександрович, Кучерук Сергій Михайлович, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: апарата, сонце, космічного, орієнтації, спосіб, сонячних, батарей
Формула / Реферат:
Спосіб орієнтації сонячних батарей космічного апарата на Сонце, який полягає в тому, що для підвищення енергозабезпечення бортової апаратури КА панелі сонячних батарей орієнтуються на Сонце, який відрізняється тим, що використовується апріорна інформація про напрям на Сонце, яка записується в бортовому запам'ятовуючому пристрої та коригується у міру необхідності.
Пристрій для орієнтації та стабілізації космічного апарата
Номер патенту: 43840
Опубліковано: 10.09.2009
Автори: Манойленко Олександр Олексійович, Кулабухов Анатолій Михайлович, Хорольський Петро Георгійович, Дронь Микола Михайлович, Хитько Андрій Володимирович, Шептун Юрій Дмитрович
МПК: B64G 1/26
Мітки: стабілізації, космічного, пристрій, орієнтації, апарата
Формула / Реферат:
1. Пристрій для орієнтації та стабілізації космічного апарата, який включає корпус та гравітаційний стрижень, що висувається із корпусу, з вантажем на кінці, який відрізняється тим, що на кінці стрижня встановлено реактивних двигунів системи орієнтації і стабілізації та/або корекції орбіти космічного апарата.2. Пристрій за п. 1, який відрізняється тим, що двигуни...
Попередній патент: Спосіб дугового наплавлення стрічковим електродом
Наступний патент: Спосіб дугового зварювання електродом, що плавиться
Випадковий патент: Спосіб безперервної підготовки крохмалистої сировини до зброджування