Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми
Номер патенту: 105986
Опубліковано: 10.07.2014
Автори: Баранов Олександр Миколайович, Краснов Леонід Михайлович, Баранов Микола Олександрович

Формула / Реферат
Спосіб аналізу електродинамічних характеристик рухомих об'єктів складної форми, який полягає в опромінюванні досліджуваного об'єкту безперервним сигналом радіолокації, прийомі відображеного сигналу, проведенні спектрального аналізу відображеного сигналу, визначенні амплітуд і фаз екстремальних спектральних складових і обчисленні на їх основі періоду обертання об'єкту і координат локальних областей розсіяння в системі координат, пов'язаній з об'єктом, який відрізняється тим, що на об'єкті додатково встановлюють калібрувальний відбивач в точці, розташованій за габаритами об'єкту, приводять об'єкт в обертальний рух навколо вертикальної осі, винесеної за габарити об'єкту і розташованої в точці, діаметрально протилежній точці розташування калібрувального відбивача, визначають амплітуду доплерівського сигналу калібрувального відбивача і обчислюють ефективні площі розсіяння локальних областей розсіяння об'єкту і уточнену ефективну площу розсіяння досліджуваного об'єкту в цілому.
Текст
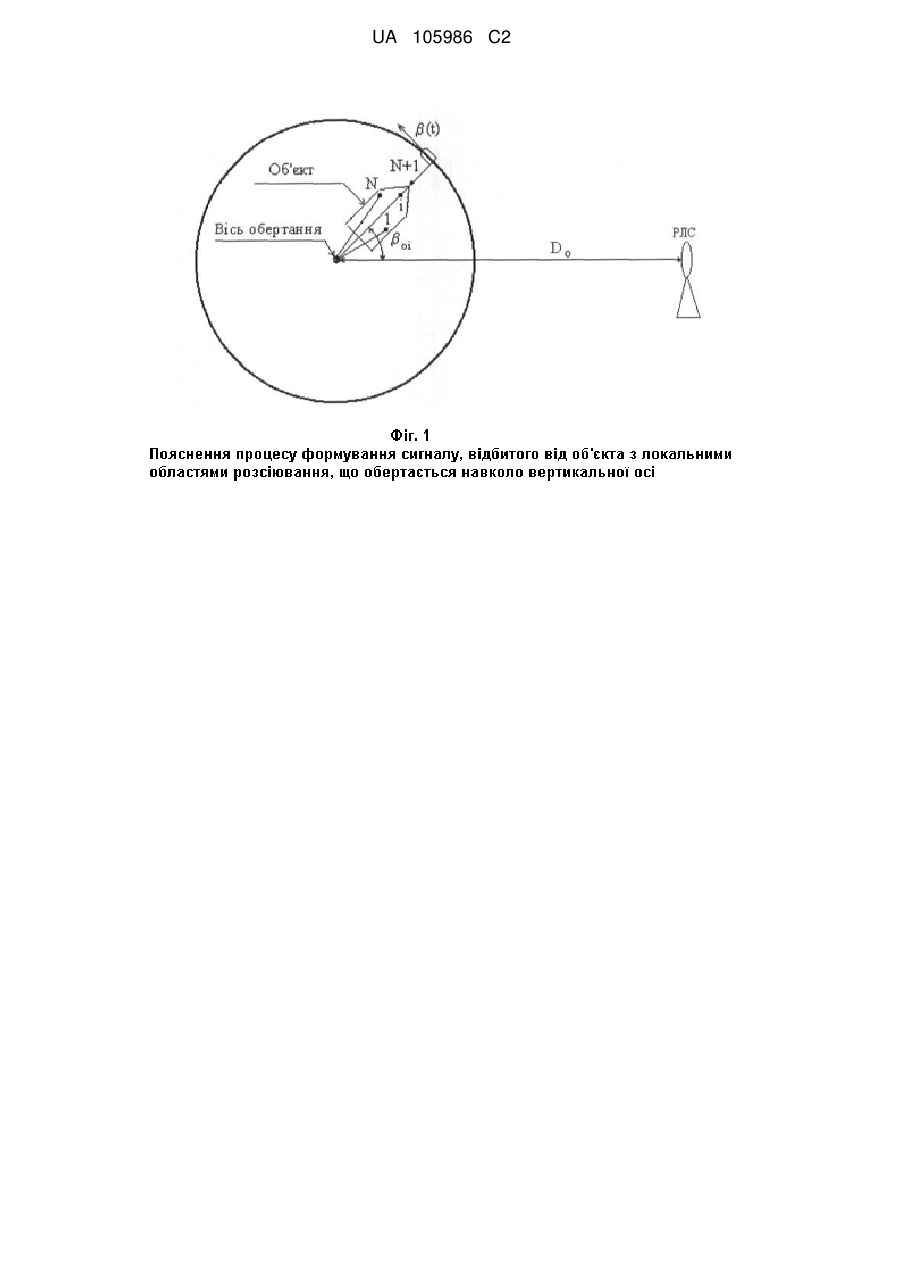
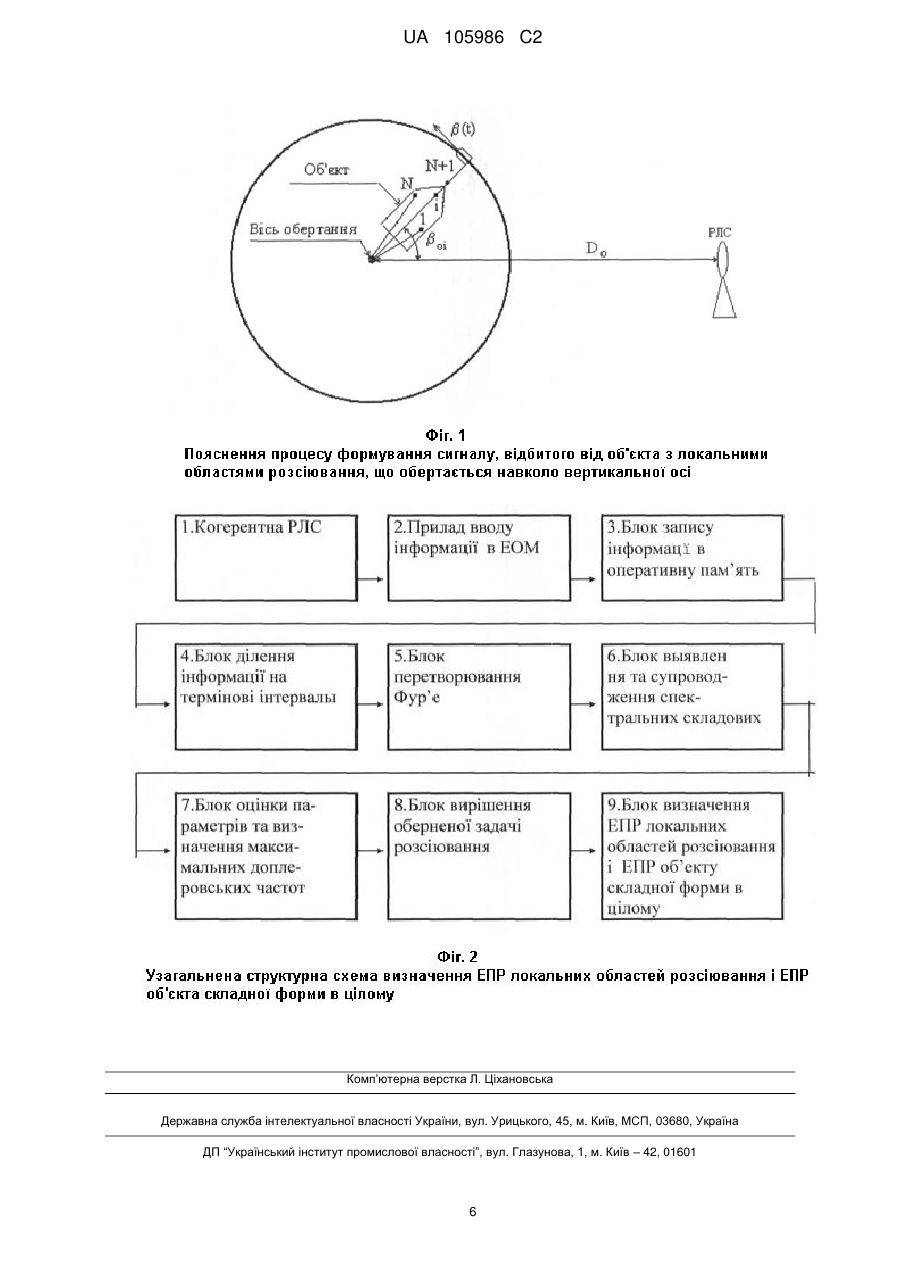
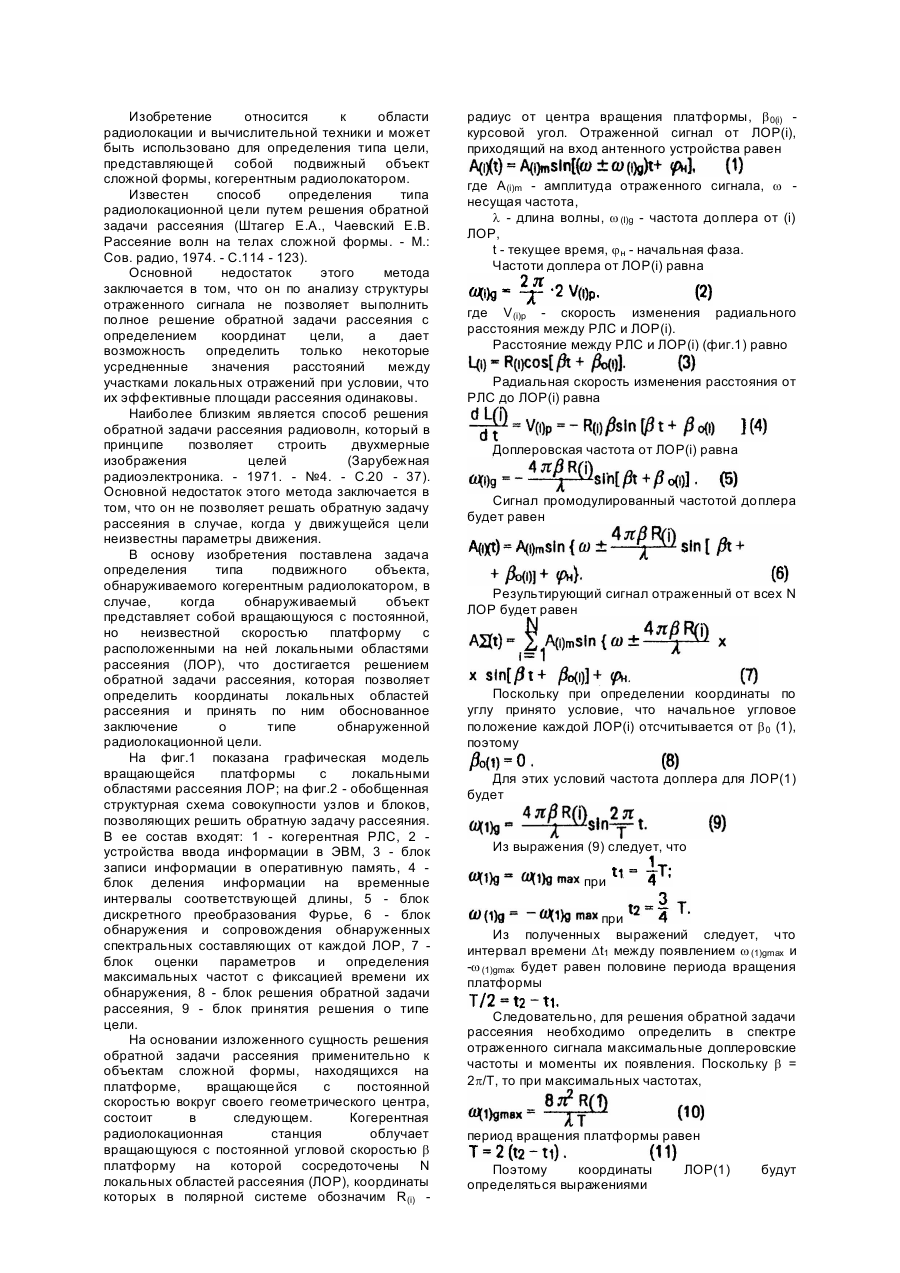
Реферат: Спосіб аналізу електродинамічних характеристик рухомих об'єктів складної форми належить до області радіолокації і обчислювальної техніки і може бути використаний для визначення ефективної площі розсіяння (ЕПР) цілі, що є рухомим об'єктом складної форми з локальними областями розсіяння (ЛОР). Відомий на основі рішення зворотної задачі розсіяння радіохвиль, що полягає в опромінюванні досліджуваного об’єкта сигналом радіолокації, прийомі відображеного сигналу, проведенні спектрального аналізу відображеного сигналу, визначенні амплітуд і фаз екстремальних складових спектру і обчисленні на їх основі періоду обертання об’єкта і координат локальних областей розсіяння в системі координат, пов'язаній з об'єктом. Додатково визначають час появи і значення максимальної доплерівської частоти сигналу, відбитого від калібрувального відбивача, заздалегідь встановленого на об'єкті, і обчислюють на їх основі ефективну площу розсіяння локальних областей розсіяння об’єкта і ефективну площу розсіяння досліджуваного об’єкта в цілому. Технічний результат заявленого винаходу полягає в забезпеченні можливості вимірювання ЕПР локальних областей розсіяння об’єкта і підвищенні точності вимірювання ЕПР об’єкта. UA 105986 C2 (12) UA 105986 C2 UA 105986 C2 5 10 15 20 25 30 35 Спосіб аналізу електродинамічних характеристик рухомих об'єктів складної форми. Винахід належить до області радіолокації і обчислювальної техніки і може бути використане для визначення ефективної площі розсіяння (ЕПР) локальних областей розсіяння (ЛОР) рухомого об'єкта складної форми і ЕПР об'єкта в цілому. Відомий спосіб визначення характеристик локальних областей розсіяння об'єкта шляхом рішення зворотної задачі розсіяння за умови, що ЕПР локальних областей розсіяння однакові [Штагер Е.А., Чаевский Е.В. Рассеяние волн на телах сложной формы. М.: Сов. радио, 1974. С. 114-123]. Цей спосіб дає можливість визначити тільки деякі усереднені значення відстаней між ділянками локальних віддзеркалень. Основний недолік цього методу полягає в тому, що він не забезпечує можливості вимірювання ЕПР локальних областей розсіяння і ЕПР об'єкта в цілому. Відомий також спосіб аналізу електродинамічних характеристик рухомих об'єктів складної форми на основі рішення зворотної задачі розсіяння радіохвиль [Пат. 24651а Україні, МКІ 6 G01R 33/02. Спосіб аналізу електродинамічних характеристик рухомих об'єктів доладно форми / B.C. Кропачев, B.C. Говоров, Л.М. Краснов, М.П. Сопін (Україна). - № 97062583; Заявл. 03.06.97; Опубл. 30.10.98, Бюл. № 5. - 4 с.], що полягає в опромінюванні досліджуваного об'єкта сигналом радіолокації, прийомі відображеного сигналу, проведенні спектрального аналізу відображеного сигналу, визначенні амплітуд і фаз екстремальних складових спектру і обчисленні на їх основі періоду обертання об'єкта і координат локальних областей розсіяння в системі координат, пов'язаній з об'єктом. Основний недолік цього методу полягає в тому, що він не забезпечує можливості вимірювання ЕПР локальних областей розсіяння об'єкта складної форми і ЕПР об'єкта в цілому. Найбільш близьким по суті винаходом є спосіб визначення ЕПР реальних об'єктів складної форми, що полягає у вимірюванні амплітуд сигналів, відображених відповідно від досліджуваного об'єкта і від калібрувального відбивача і обчисленні на їх основі ЕПР досліджуваного об'єкта [Штагер Е.А. Рассеяние радиоволн на телах сложной формы. М.: Радио и связь, 1986. - С. 160-162]. Відомий метод містять наступні основні елементи: об'єкт вимірювань; вимірювач РЛС; трасу розповсюдження радіохвиль між об'єктом і вимірювальною РЛС; калібрувальний відбивач з відомою ЕПР; трасу розповсюдження радіохвиль між калібрувальним відбивачем і вимірювальною РЛС; апаратуру реєстрації відображеного сигналу і пристроїв статистичної його обробки. Вимірюваною величиною служить амплітуда A(t) відображеного сигналу на виході крайового каскаду відеопідсилювача або відеодетектора. По відомій прохідній характеристиці приймального тракту значення A(t) може бути перераховане в значення інтенсивності відображеного сигналу Іотр на виході приймальної антени. Інтенсивність відображеного сигналу пов'язана з характеристиками вимірником РЛС основним рівнянням радіолокації: 40 Iотр 45 50 55 IпадG2 2 42 R 4 4 V0 , (а) де Iпад - інтенсивність випромінюваного сигналу; G - коефіцієнт направленої дії антени; λдовжина хвилі поля; σ - ЕПР об'єкта; R - дальність від нього; V0 - функція (множник) ослаблення на трасі розповсюдження хвилі до об'єкта і назад. ЕПР об'єкта може бутив принципі визначена з (а), якщо всі вхідні в це рівняння величини відомі. Проте точнішим методом представляється метод, заснований на порівнянні ЕПР об'єкта і калібрувального відбивача. Траса розповсюдження характеризується функцією ослаблення V 0. Для приземних трас невеликої протяжності квадрат функції ослаблення може бути виражений у вигляді відношення інтенсивності падаючого поля в місці розташування об'єкта до інтенсивності цього ж поля у вільному просторі на тому ж віддаленні від РЛС. Аргументами функції ослаблення служать віддаль і висота точки спостереження h над землею чи морем. Проте знання детермінованих залежностей V0(R, h) достатнє лише для коротких трас. В протилежному випадку ординати функції ослаблення стають випадковими величинами і першочергове значення набувають вже її імовірнісні характеристики. Калібрувальний відбивач застосовують для калібрування інтенсивності відображеного сигналу від досліджуваного об'єкта в одиницях ЕПР. Для цього відбивач встановлюють на опорі, що мало відбиває, поблизу вимірюваної РЛС так, щоб забезпечити можливість почергового 1 UA 105986 C2 наведення антени то на відбивач, то на досліджуваний об'єкт. Інтенсивність сигналу, що створюється калібрувальним відбивачем, також визначається відповідно до рівняння радіолокації: Ik IпадG2 2 4 2 4 Rk 4 k Vk , (b) 5 де Vk - функція ослаблення на трасі до калібрувального відбивача; решта позначень такі, як у формулі (а). Поділивши (a) на (b), отримуємо вираз для ЕПР об'єкта, визначуваного за допомогою калібрувального відбивача: 10 Iотр / Ik RVk / Rk V0 4 k . 15 20 25 30 35 40 45 50 (с) На відміну від траси розповсюдження хвиль до вимірюваного об'єкта функція ослаблення на трасі до калібрувального відбивача визначається експериментально. Вимірювання функції Vk R,h може проводитися таким чином. Калібрувальний відбивач встановлюють на опорі змінної висоти. Змінюючи висоту підйому відбивача в межах одиниць метра, реєструють зміну від мінімуму до максимуму інтенсивності відображеного сигналу. Інтерференційний характер залежності Vk від висоти підйому відбивача h обумовлений підсумовуванням двох сигналів: безпосередньо відображеного у напрямі антени вимірювальної РЛС і перевідбитого від земної поверхні. При зміні висоти підйому відбивача відбувається зміна різниці фаз між складовими сигналами, що обумовлює інтерференційний характер залежності Vk (h). Проте відомий спосіб вимірювання ефективної площі радіолокації розсіяння забезпечує відносно невисоку точність вимірювання, обумовлену відмінністю трас розповсюдження радіохвиль між об'єктом і вимірювальною РЛС і між калібрувальним відбивачем і вимірювальною РЛС, а також не забезпечує можливості вимірювання ЕПР локальних областей розсіяння об'єкта складної форм. Задача винаходу - забезпечення можливості вимірювання ЕПР локальних областей розсіяння об'єкта складної форми і підвищення точності визначення ЕПР об'єкта в цілому. Поставлена задача досягається шляхом виконання наступних операцій: - установка калібрувального відбивача на досліджуваному об'єкті в точці, розташованій за габаритами об'єкта; - приведення об'єкта в обертальний рух навколо вертикальної осі, винесеної за габарити об'єкта і розташованої в точці, діаметрально протилежній точці розташування калібрувального відбивача; - опромінювання об'єкта безперервним сигналом когерентної РЛС; - аналіз спектра доплерівських частот відображеного сигналу; - визначення амплітуди доплерівської частоти і координати кожної ЛОР; - визначення амплітуди доплерівської частоти і координати калібрувального відбивача; - визначення ЕПР кожній ЛОР об'єкта; - визначення ЕПР об'єкта в цілому. Викладена суть винаходу пояснюється рисунками: Фіг. 1. Графічна модель платформи, що обертається, з локальними областями розсіяння ЛОР. Фіг. 2. Узагальнена структурна схема сукупності вузлів і блоків, що дозволяють визначити ЕПР локальних областей розсіяння і ЕПР об'єкта в цілому. У її склад входять: 1 - когерентна РЛС безперервного випромінювання, 2 - пристрій введення інформації в ЕОМ, 3 - блок запису інформації в оперативну пам'ять, 4 - блок ділення інформації на тимчасові інтервали відповідної довжини, 5 - блок дискретного перетворення Фур'є, 6 - блок виявлення і супроводу виявлених спектральних складових від кожної локальної області розсіювання (ЛОР), 7 - блок оцінки параметрів і визначення максимальних частот з фіксацією часу їх виявлення, 8 - блок рішення зворотної задачі розсіяння, 9 - блок визначення ЕПР кожній ЛОР об'єкта і ЕПР об'єкта в цілому. Суть методу визначення ЕПР кожній ЛОР об'єкта і ЕПР об'єкта в цілому стосовно об'єктів складної форми, що знаходяться на платформі, що обертається з постійною швидкістю і полягає в наступному. 2 UA 105986 C2 5 N ЛОР на платформі, що обертається з постійною, але невідомою кутовою швидкістю b. Координати ЛОР на платформі визначаються в полярній системі координат: R і - відстань від центру обертання платформи до і-ої ЛОР; boi - початковий кут і-ої ЛОР. Хай D0 - відстань від осі обертання платформи до РЛС. Калібрувальний відбивач встановлюється в точці N+1, винесеній за межі найбільшого габаритного розміру об'єкта (рис. 1). Запишемо відображений від і-ої ЛОР сигнал, що приходить на вхід антенного пристрою A i t A im sin id t i , 10 де A im - амплітуда відображеного сигналу; - несуча частота; t - поточний час; i початкова фаза; id - доплерівська частота сигналу, відображеного від і-го відбивача, id 15 4Vir , (2) де Vir - швидкість зміни радіальної відстані між РЛС і і-ої ЛОР; - довжина хвилі зондуючого коливання. Відстань між РЛС і і-ої ЛОР можна представити виразом: Li t D9 Ri cost 0i , диференціюючи яке, знаходимо радіальну швидкість зміни відстані від РЛС до і-ої ЛОР: Vir 20 (1) dL i t R i sin t 0i , dt (3) Після підстановки (3) в (2), знаходимо доплерівську частоту, що створюється і-ою ЛОР: id t id max sint 0i , (4) 4 R i . Доплерівські частоти, відповідні кожній і-й ЛОР, при обертанні платформи змінюються по синусоїдальному закону (4). Підставляючи (4) в (1), отримуємо вираз для сигналу, що промодулюється доплерівською частотою: A i t A im sin id max sint 0i t i . де id max 25 Результуючий сигнал, прийнятий від всіх N ЛОР і від калібрувального відбивача, можна представити у вигляді: 30 A i t A im sin id max sint 0i t i . N 1 i 1 Доплерівська частота сигналу, відповідного першої ЛОР (для якої можна прийняти 01 0 ) визначається як: id t id max sint , 35 (5) T , 1d 1d max , а при t 2 3T 1d 1d max , тобто 4 4 інтервал часу між появою частот 1d max і 1d max дорівнює половині періоду обертання З виразу (5) виходить, що при t 1 платформи T t 2 t1 . Отже, період обертання платформи рівний: 2 T 2t 2 t1 , (6) 3 UA 105986 C2 Оскільки 2 , то максимальна доплерівська частота і-ої ЛОР відповідно до (4) рівна T 8 2Ri . Тоді довжина радіусу - вектора кожної і-ої ЛОР визначається виразом: T 1d max Ri 5 1d max T , 8 2 (7) Кутове положення кожної і-ої ЛОР пропорційно інтервалу часу між моментами появи максимумів доплерівських частот першою і і-й ЛОР 1d max і id max і знаходиться як: 0i ai , 10 Визначення величин id max і ai можна виконати на основі спектрального аналізу сигналу на виході приймача РЛС. При когерентній обробці сигнал на виході фазового детектора має вигляд: A t 15 A im sinid max sint 0i t i , N 1 N 1 i 1 A im sinid max sint 0i t i e jt dt . Оскільки спектр G (w) характеризує поведінка сигналу Авих(t) на всій осі часу t , а в даному випадку являє інтерес поведінка Авих(t) в деякій околиці теперішнього моменту t s, то доцільно перетворити миттєвий спектр сигналу (9) до вигляду: G, t s 25 (9) i 1 і є сумою коливань з доплерівськими частотами. Доплерівські частоти, відповідні і-й ЛОР, при обертанні платформи змінюються по синусоїдальному закону (4). У загальному випадку спектр сигналу (9) можна представити у вигляді: G 20 (8) ts t a 2 ts t a 2 A im sinid max sint 0i t i e jt dt , N 1 i 1 де t a - інтервал спектрального аналізу. Розрахунок миттєвого спектра реалізації сигналу Aвих(t) здійснюють таким чином. Реалізацію сигналу Aвих(t) за допомогою АЦП перетворять в послідовність відліків. Далі послідовність відліків розбивають на М груп відліків. Для кожної групи відліків за допомогою процедури швидкого перетворення Фур'є обчислюють миттєвий спектр G (ω, ts), s=1, 2…, М і визначають доплерівські частоти ωids(t) і амплітуди Аim. З основного рівняння радіолокації виходить, що інтенсивність сигналу, відображеного від і-й ЛОР рівна: 30 2 A im 35 2 A изл G 2 2 42 R i2 i Vi4 , (10) 2 де A изл - інтенсивність сигналу, що випромінює; G - коефіцієнт направленої дії антени; довжина хвилі поля; i і - ЕПР і-й ЛОР; R i - дальність від неї; Vi - множник ослаблення на трасі розповсюдження хвилі до і-ої ЛОР і назад. Аналогічно визначається інтенсивність сигналу, відображеного від відбивача, що калібрується: 4 UA 105986 C2 2 A N 1, m 5 2 A изл G 2 2 4 2 2 R N 1 4 N 1VN 1 , (11) де N1 - ЕПР відбивача, що калібрується; RN1 - дальність до відбивача, що калібрується, і назад; VN1 - множник ослаблення на трасі розповсюдження хвилі до відбивача, що калібрується, і назад. На підставі співвідношень (10) і (11) ЕПР і-ої ЛОР визначають як: i N 1 2 A im 2 4 RN 1 VN 1 . 2 A N 1, m Ri2 Vi4 (12) Оскільки в даному випадку можна прийняти Ri RN1 і Vi VN1 , той вираз (12) приймає вигляд: 10 i N 1 2 A N 1, m A i2 . m (13) На підставі принципу суперпозиції електромагнітного поля, ЕПР об'єкта в цілому визначають у вигляді суми ЕПР локальних областей розсіяння: N i 20 25 30 N A i2m . 2 A N1, m i 1 Визначення ЕПР об'єкта складної форми пояснюється за допомогою фіг. 2. Технікоекономічний ефект передбачуваного винаходу полягає по суті винаходу - в забезпеченні можливості вимірювання ЕПР локальних областей розсіяння об'єкта складної форми і підвищення точності вимірювання ЕПР об'єкта в цілому. i 1 15 N 1 ФОРМУЛА ВИНАХОДУ Спосіб аналізу електродинамічних характеристик рухомих об'єктів складної форми, який полягає в опромінюванні досліджуваного об’єкта безперервним сигналом радіолокації, прийомі відображеного сигналу, проведенні спектрального аналізу відображеного сигналу, визначенні амплітуд і фаз екстремальних спектральних складових і обчисленні на їх основі періоду обертання об’єкта і координат локальних областей розсіяння в системі координат, пов'язаній з об'єктом, який відрізняється тим, що на об'єкті додатково встановлюють калібрувальний відбивач в точці, розташованій за габаритами об’єкта, приводять об'єкт в обертальний рух навколо вертикальної осі, винесеної за габарити об’єкта і розташованої в точці, діаметрально протилежній точці розташування калібрувального відбивача, визначають амплітуду доплерівського сигналу калібрувального відбивача і обчислюють ефективні площі розсіяння локальних областей розсіяння об’єкта і уточнену ефективну площу розсіяння досліджуваного об’єкта в цілому. 5 UA 105986 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори англійськоюBaranov Oleksandr Mykolaiovych, Krasnov Leonid Mykhailovych, Baranov Mykola Oleksandrovych
Автори російськоюБаранов Александр Николаевич, Краснов Леонид Михайлович, Баранов Николай Александрович
МПК / Мітки
МПК: G01S 13/82, G01R 29/10
Мітки: форми, об'єктів, характеристик, електродинамічних, рухомих, аналізу, спосіб, складної
Код посилання
<a href="https://ua.patents.su/8-105986-sposib-analizu-elektrodinamichnikh-kharakteristik-rukhomikh-obehktiv-skladno-formi.html" target="_blank" rel="follow" title="База патентів України">Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми</a>
Спосіб аналізу електродинамічних характеристик рухомих об’єктів складної форми
Номер патенту: 24561
Опубліковано: 04.08.1998
Автори: Краснов Леонід Михайлович, Кропачев Виктор Степанович, Говоров Валентін Сергійович, Сопін Микола Павлович
МПК: G01R 33/02
Мітки: аналізу, рухомих, спосіб, характеристик, форми, об'єктів, складної, електродинамічних
Формула / Реферат:
Способ анализа электродинамических характеристик подвижных объектов сложной формы, состоящий в облучении объекта непрерывным сигналом, приеме отраженных сигналов, проведении спектрального анализа отраженного сигнала, определении амплитуд и фаз экстремальных спектральных составляющих, вычислении на их основе относительной дальности и поперечных расстояний между локальными областями рассеяния, отличающийся тем, что дополнительно определяют...
Спосіб визначення електродинамічних характеристик одновимірних дротяних решіток
Номер патенту: 76285
Опубліковано: 17.07.2006
Автори: Масалов Сергій Олександрович, Каменєв Юрій Юхимович, Филимонова Ганна Олександрівна
МПК: G01J 4/00, G02F 1/01, G01J 5/02
Мітки: дротяних, решіток, характеристик, одновимірних, спосіб, визначення, електродинамічних
Формула / Реферат:
Спосіб визначення електродинамічних характеристик одновимірних дротяних решіток, що включає вимірювання потужності лінійно поляризованого лазерного випромінювання, що пройшло крізь вимірювану решітку, яку використовують як вивідне дзеркало лазера при його роботі в динамічному режимі, і поворот досліджуваної решітки до отримання еліптично поляризованого вихідного лазерного випромінювання з двома рівними компонентами, один з яких паралельний,...
Пристрій для визначення форми і розмірів заготовки для витяжки деталей складної форми
Номер патенту: 31231
Опубліковано: 25.03.2008
Автори: Холявік Ольга Витальевна, Азарх Ілля Павлович, Тривайло Михайло Семенович, Стеблюк Володимир Іванович, Добровлянський Сергій Миколайович, Вишневський Петро Сергійович
МПК: B21D 22/20
Мітки: визначення, витяжки, складної, заготовки, пристрій, розмірів, деталей, форми
Формула / Реферат:
1. Пристрій для визначення форми і розмірів заготовки для витяжки деталей складної форми, що містить співвісно розташовані з радіальним зазором матрицю і пуансон, дистанційно закріплену над матрицею прозору пластину з координатною сіткою, а також розміщену під матрицею заповнювану пластичним матеріалом камеру з поршнем, який відрізняється тим, що робочий торець пуансона має симетрично загострену відносно осі пуансона форму.2. Пристрій...
Спосіб виготовлення порошкових виробів складної форми
Номер патенту: 65025
Опубліковано: 25.11.2011
Автори: Нікітін Юрій Миколайович, Добриднєва Алла Ігорівна, Рябічева Людмила Олександрівна
Мітки: виготовлення, порошкових, виробів, форми, спосіб, складної
Формула / Реферат:
Спосіб виготовлення порошкових виробів складної форми, що включає пресування пористої заготовки простої форми, спікання, гаряче штампування, яке виконують в умовах всебічного стиску у дві стадії за один хід пресового інструменту, який відрізняється тим, що на першій стадії заготовку деформують без підпору, а на другій - формують і ущільнюють бічний відросток додатковими пуансонами і підпорами.
Спосіб аналізу частотних характеристик
Номер патенту: 65174
Опубліковано: 16.10.2006
Автори: Хохряков Михайло Вікторович, Дудко Павло Григорович, Колодяжний Валерій Васильович, Кучмій Євген Антонович, Дістрянов Сергій Володимирович, Доценко Андрій Іванович, Михайлів Василь Іванович
МПК: G01R 23/16
Мітки: аналізу, характеристик, спосіб, частотних
Формула / Реферат:
Спосіб лікування хворих на гемофілію включає внутрішньовенне введення препаратів крові. Із судинного русла хворого вилучають до 500 мл крові, центрифугують, плазму видаляють, еритроцити повертають до судинного русла хворого. Кількість процедур проводять у залежності від клінічного стану хворого та рівня активності VIII фактора у плазмі крові.
Попередній патент: Пристрій для загортання кулінарних виробів з начинкою
Наступний патент: Спосіб одержання твердої емульсії та тверда емульсія
Випадковий патент: Апарат сисоєва с.м., смирнової с.м. для витягування ретенованого зуба