Спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу
Номер патенту: 107715
Опубліковано: 24.06.2016
Автори: Зозуляк Оксана Володимирівна, Зозуляк Ігор Анатолійович, Чубик Роман Васильович


Формула / Реферат
Спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи ![]() , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту
, підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту ![]() та амплітуду
та амплітуду ![]() коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування корегує частоту та амплітуду вимушуючих коливань віброприводу робочого органу, до частоти
коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування корегує частоту та амплітуду вимушуючих коливань віброприводу робочого органу, до частоти ![]() , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань робочого органу
, яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань робочого органу ![]() на резонансній частоті, яка відрізняється тим, що виконувалась наступна умова
на резонансній частоті, яка відрізняється тим, що виконувалась наступна умова ![]() , де
, де ![]() та
та ![]() задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини.
задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини.
Текст
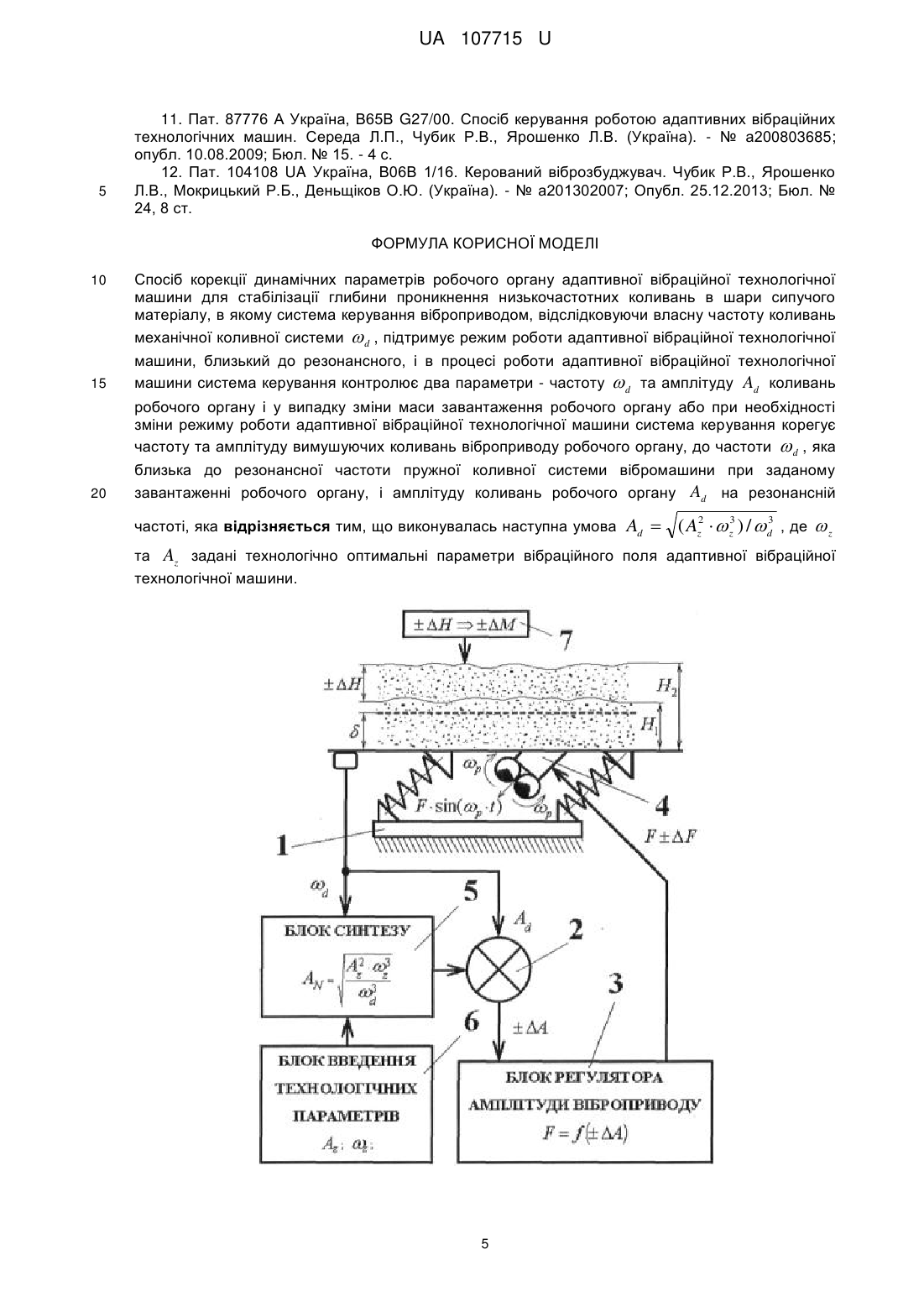
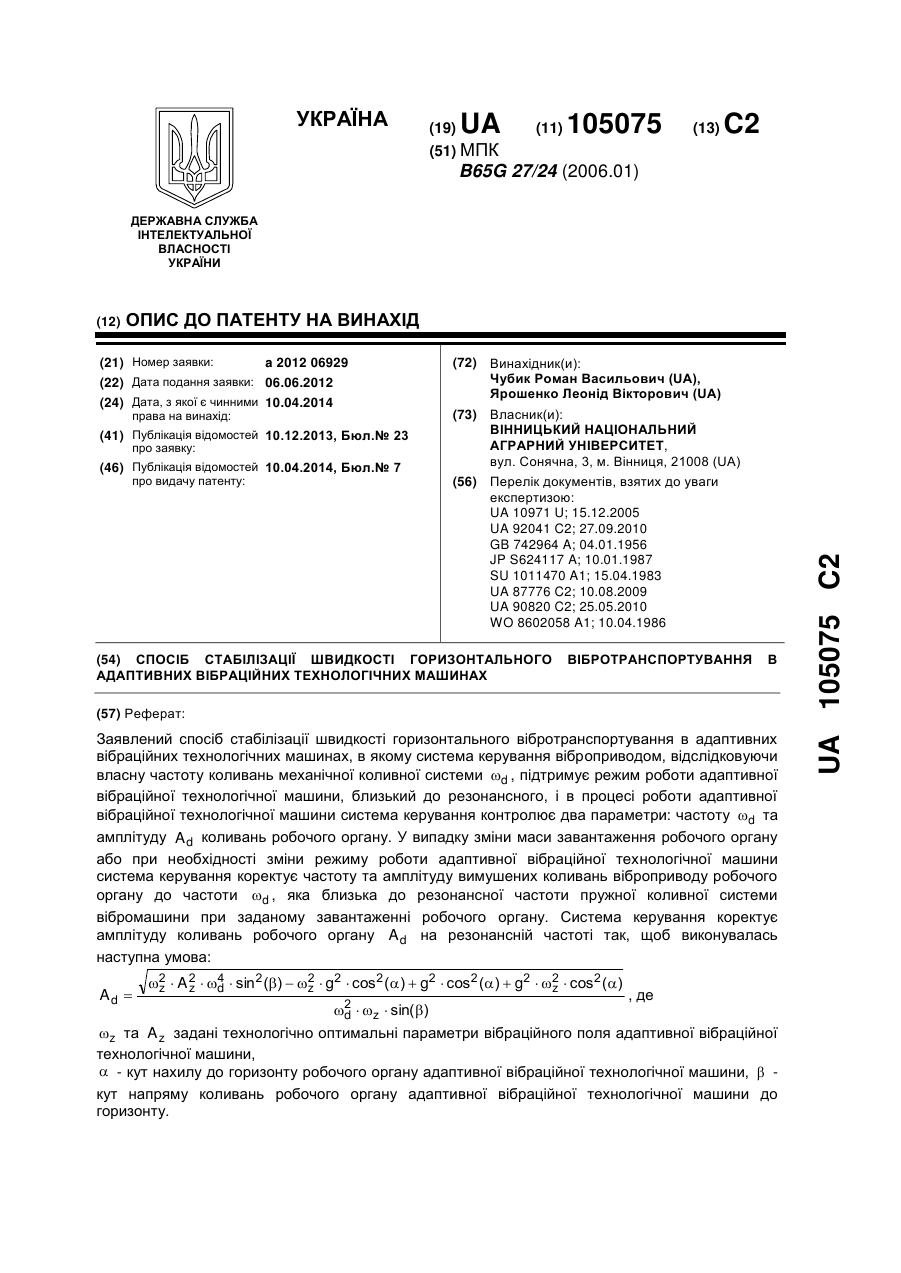
Реферат: Спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту d та амплітуду Ad коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування корегує частоту та амплітуду вимушуючих коливань віброприводу робочого органу, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань робочого органу Ad на резонансній частоті, при якому виконувалась наступна умова 3 Ad ( Az2 z3 ) / d , де z та Az задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини. UA 107715 U (54) СПОСІБ КОРЕКЦІЇ ДИНАМІЧНИХ ПАРАМЕТРІВ РОБОЧОГО ОРГАНУ АДАПТИВНОЇ ВІБРАЦІЙНОЇ ТЕХНОЛОГІЧНОЇ МАШИНИ ДЛЯ СТАБІЛІЗАЦІЇ ГЛИБИНИ ПРОНИКНЕННЯ НИЗЬКОЧАСТОТНИХ КОЛИВАНЬ В ШАРИ СИПУЧОГО МАТЕРІАЛУ UA 107715 U UA 107715 U 5 10 15 20 25 Корисна модель стосується вібраційної техніки і може знайти застосування у машинобудуванні та приладобудуванні, а також у гірничо-переробній, хімічній, харчовій, будівельній промисловості та сільськогосподарському виробництві. Відомий спосіб керування роботою машини із коливними рухами робочих органів [1], в якому згідно з корисною моделлю, , в процесі роботи адаптивної вібраційної технологічної машини (АВТМ) система керування контролює два параметри - частоту та амплітуду коливань робочого органу і у випадку зміни завантаження робочого органу або при необхідності зміни режиму роботи машини система керування коректує частоту та амплітуду вимушуючих коливань приводу робочого органу, до частоти, яка близька до резонансної частоти пружної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань на резонансній частоті так, що б вона відповідала оптимальному режиму технологічного процесу. Недоліком такого способу стабілізації технологічних параметрів вібраційного поля АВТМ є те, що один і той же рівень амплітуди коливань робочого органу АВТМ на різних частотах призведе до різної інтенсивності технологічного процесу, це зумовлюється тим, що якщо наприклад вібромашина працювала при резонансній частоті 50 Гц із амплітудою у 3 мм, і при зміні маси завантаження робочого органу резонансна частота зросте до 52 Гц при тій же амплітуді у 3 мм, що призведе до зміни інтенсивності технологічного процесу АВТМ. Це пояснюється тим, що у першому випадку за 1 с АВТМ виконувала 50 повних коливань, де за кожне коливання виконувалась певна корисна робота, а в другому випадку АВТМ уже виконуватиме 52 повні коливання при тій же самій амплітуді коливань робочого органу, тому у другому випадку буде більша інтенсивність віброобробки, що для певних технологічних процесів є недопустимим. Найбільш близьким за технічною суттю є спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин (АВТМ) [2], в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, в процесі роботи адаптивної вібраційної технологічної машини 30 система керування контролює два параметри - частоту d та амплітуду Ad коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує частоту та амплітуду вимушуючих коливань віброприводу робочого органу, де частота d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань робочого органу Ad на резонансній частоті так, щоб виконувалась умова 35 40 2 Ad ( Az2 z2 ) / d , де z та Az заданих технологічних оптимальних параметрів вібраційного поля адаптивної вібраційної технологічної машини. Недоліком такого способу стабілізації технологічних параметріввібраційного поля АВТМ є те, що застосування питомої роботи вібраційного поля є адекватним та експериментально доведеним критерієм в роботах [3, 4, 5] для якісної та кількісної оцінки лише технологічних процесів, що пов'язані із віброабразивною обробкою деталей. Тому застосування способу керування динамічними параметрами робочого органу АВТМ на резонансній робочій частоті так, щоб виконувалась умова 45 50 2 Ad ( Az2 z2 ) / d для таких технологічних процесів, як наприклад: вібросушіння, віброохолодження, віброущільнення, віброзміцнення (підвищення мікротвердості, створення залишкових напружень), віброочистка (очистка заготовок і деталей від окалини, корозії, нагару), віброперемішування, є недоцільним. Задачею є підвищення точності дотримання технологічних режимів роботи адаптивних вібраційних технологічних машин. Поставлена задача вирішується тим, що в способі корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту d та амплітуду Ad коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування коректує 1 UA 107715 U частоту та амплітуду вимушуючих коливань віброприводу робочого органу, до частоти d , яка близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань робочого органу Ad на резонансній частоті так, щоб виконувалась наступна умова 5 10 15 20 25 30 35 40 3 Ad ( Az2 z3 ) / d , де z та Az задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини. Запропонований спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу дозволяє системі керування динамічними параметрами віброприводу автоматично оптимізовувати динамічні параметри віброкиплячого середовища із сипучого матеріалу в технологічних процесах, що реалізуються чи інтенсифікуються за допомогою вібрації. Оптимізація динамічних параметрів сипучого віброкиплячого середовища за критерієм розповсюдження вібрації в шарах дозволяє забезпечити стабільність протягом технологічного циклу віброобробки (наприклад: вібросушіння, віброохолодження, віброущільнення, віброзміцнення (підвищення мікротвердості, створення залишкових напружень), віброочистки (очистка заготовок и деталей від окалини, корозії, нагару), таких технологічних параметрів адаптивної вібраційної технологічної машини як: якість віброперемішування, час віброперемішування та продуктивність технологічної лінії. На кресленні зображено функціональну схему способу корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу. На кресленні зображено функціональну схему запропонованого способу корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу. На адаптивну вібраційну технологічну машину 1 діє M параметричне збурення 7, що може бути обумовлене зміною висоти шару H сипучого матеріалу на робочому органі адаптивної вібраційної технологічної машини або зміною густини, вологості, неоднорідності чи будь яких інших фізико-хімічних властивостей сипучого матеріалу. Адаптивна вібраційна технологічна машина 1 з'єднана із блоком порівняння 2 та блоком синтезу 5, який з'єднаний із блоком 6 введення технологічних параметрів вібраційного поля. Сигнал з виходу блока синтезу 5 надходить на блок порівняння 2, а з виходу блока порівняння 2 надходить у блок регулятора амплітуди віброприводу 3 і з його виходу надходить на вібропривод 4, що приводить в рух адаптивну вібраційну технологічну машину 1. Спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу полягає у наступному: висота (глибина) шару, на яку проникають низькочастотні коливання від робочого органу адаптивних вібраційних технологічних машин, залежить від багатьох фізико-хімічних властивостей сипучого матеріалу і від того чи діють на нього лише вібраційним впливом, чи паралельно із вібраційним впливом застосовують подачу через шар розріджуючого агента (наприклад: гарячого повітря, …). В роботі [6] показано, що із збільшенням відстані від дна робочого органу адаптивної вібромашини коефіцієнт вібров'язкості зростає, а рухомість частинок сипучого матеріалу падає. І в такому випадку глибина проникнення низькочастотних коливань в шар сипучого матеріалу визначається наступним виразом: 2 N 1 , (1) 2 3 S Ad d де N - потужність, яка передається сипучому матеріалу, що знаходиться у робочому органі АВТМ, S - площа поверхні робочого органу, яка передає коливання сипучому матеріалу, середня густина сипучого матеріалу, що знаходиться в робочому органі АВТМ, Ad - дійсна амплітуда коливань робочого органу АВТМ, d - дійсна частота коливань робочого органу 45 50 АВТМ. Аналізуючи вираз (1) можна побачити, що зниженням частоти коливань робочого органу в адаптивних вібраційних технологічних машинах призводить до збільшення величини зони проникнення вібрації в шар сипучого матеріалу. Основною рисою адаптивних вібраційних технологічних машин є відслідковування зміни приведеної маси [7, 8, 9] M коливної системи вібромашини та постійне автоматичне підстроювання частоти p коливань циклічної 2 UA 107715 U вимушуючої сили дебалансного віброприводу до власної резонансної частоти коливної механічної системи АВТМ. Завдяки постійній автоматичні корекції p АВТМ завжди працює в 5 10 15 енергозберігаючому резонансному режимі. Зміна висоти шару H сипучого матеріалу на робочому органі адаптивної вібраційної технологічної машини або зміна густини, вологості, неоднорідності чи будь яких інших фізико-хімічних властивостей сипучого матеріалу буде причиною зміни M приведеної маси коливної механічної системи АВТМ. Як наслідок система керування динамічними параметрами дебалансного віброприводу відрегулює його частоту циклічної вимушуючої сили p , а це буде причиною зміни глибини проникнення низькочастотних коливань в шар сипучого матеріалу. Хаотична зміна глибини проникнення низькочастотних коливань в шар сипучого матеріалу негативно впливатиме на параметри віброкиплячого середовища із сипучого матеріалу (наприклад: якість віброперемішування, час віброперемішування, продуктивність технологічної лінії) та ті технологічні процеси, що реалізовуються чи інтенсифікуються за допомогою вібрації (наприклад [10]: вібросушіння, віброохолодження, віброущільнення, віброзміцнення (підвищення мікротвердості, створення залишкових напружень), віброочистка (очистка заготовок й деталей від окалини, корозії, нагару). Для того, щоб глибина проникнення низькочастотних коливань в шар сипучого матеріалу залишилась на попередньому рівні необхідно проводити корекцію дійсної амплітуди Ad коливань робочого органу АВТМ шляхом зміни амплітуди F циклічної вимушуючої сили F sin p t , яка передається робочому органу вібромашини. 20 25 Принцип роботи запропонованого способу корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу проілюстровано (Фіг. 1) на прикладі адаптивної вібраційної технологічної машини 1, на яку діє постійне параметричне збурення 7 у вигляді зміни приведеної маси M коливної системи АВТМ 1. Відповідно до [9] зміни приведеної маси M коливної системи є причиною зміни власної резонансної частоти АВТМ. Завдяки тому, що АВТМ автоматично відслідковує зміну власної резонансної частоти коливної механічної системи та автоматично коректує [11] p частоту циклічної вимушуючої сили дебалансного віброприводу 4, відбувається підтримування постійного резонансного режиму роботи. Внаслідок чого d дійсна частота коливань робочого органу АВТМ постійно змінюється 30 35 40 45 (плаває) і як наслідок присталі (незмінній) амплітуді циклічної вимушуючої сили дебалансного вібропривод 4 плаватиме (змінюватиметься) Ad дійсна амплітуда коливань робочого органу АВТМ. Відповідно до виразу (1) в часі постійно змінюватиметься і глибина проникнення низькочастотних коливань в шар сипучого матеріалу, що негативно впливатиме на технологічні процеси, які реалізовуватиме адаптивна вібромашина 1. Постійна зміна глибини проникнення низькочастотних коливань в шар сипучого матеріалу протягом циклу технологічної віброобробки негативно вплине на якість віброперемішування, час віброперемішування (за час циклу вібромашина не встигатиме) та продуктивність технологічної лінії. Щоб стабілізувати в часі глибину проникнення низькочастотних коливань в шар сипучого матеріалу відносно довільної робочої частоти адаптивної вібромашини 1 необхідно відштовхуватися від заданої глибини проникнення низькочастотних коливань в шар сипучого матеріалу, яка є оптимальною з технологічної точки зору для конкретного вібропроцесу із певними фізико-хімічних властивостями сипучого матеріалу. Задана глибина проникнення низькочастотних коливань в шар сипучого матеріалу визначатиметься технологічно оптимальними динамічними параметрами робочого органу Az , заданою амплітудою коливань робочого органу АВТМ 1 та z заданою частотою коливань робочого органу АВТМ 1. Задані технологічно оптимальні динамічні параметри робочого органу АВТМ 1 через блок 6 введення технологічних параметрів надходять в блок синтезу 5. В блоці синтезу 5 на основі інформації від АВТМ 1 про дійсну Ad амплітуду коливань робочого органу АВТМ 1 та 50 d дійсну частоту коливань робочого органу АВТМ 1 відбувається порівняння заданої глибини проникнення низькочастотних коливань в шар сипучого матеріалу із дійсною глибиною проникнення низькочастотних коливань в шар сипучого матеріалу. 3 UA 107715 U 5 2 N 1 2 N 1 2 3 2 3 S Ad d S Az z На основі порівняння заданої глибини проникнення низькочастотних коливань в шар сипучого матеріалу із дійсною глибиною проникнення низькочастотних коливань в шар сипучого матеріалу можна легко визначити AN необхідну амплітуду коливань робочого органу АВТМ 1, яка дозволяє при d дійсній частоті коливань робочого органу АВТМ 1 забезпечити задане проникнення низькочастотних коливань в шар сипучого матеріалу. Якщо прирівняти задане проникнення низькочастотних коливань в шар сипучого матеріалу із необхідним для конкретної d дійсної частоти коливань робочого органу АВТМ 1 отримаємо AN необхідну амплітуду коливань робочого органу: 10 2 N 1 2 N 1 , звідки AN 2 3 2 3 S AN d S Az z Az2 z3 3 d (2) В блоці порівняння 2 відбувається порівняння дійсної Ad амплітуди коливань робочого органу АВТМ 1 AN необхідною амплітудою коливань робочого органу АВТМ 1. Безпосередньо 15 по модулю та знаках даного порівняння A можна судити наскільки і в яку сторону необхідно проводити корекцію амплітуди циклічної вимушуючої сили дебалансного віброприводу 4, щоб глибиною проникнення низькочастотних коливань в шар сипучого матеріалу залишалась d дійсної частоти коливань робочого органу АВТМ 1. На основі величини та знака параметра A блок регулятора амплітуди віброприводу незмінною при кожному конкретному значенні 20 25 30 35 40 45 50 3 проводить зміну кута [12] між дебалансами віброприводу 4, коректуючи амплітуду його циклічної вимушуючої сили. Реалізація автоматичного контуру керування динамічними параметрами керованого дебалансного віброприводу на основі виразу (2) дозволяє розширити технологічні можливості адаптивних вібраційних машин за рахунок стабілізації глибини проникнення низькочастотних коливань в шар сипучого матеріалу. Джерела інформації: 1. Пат. 10971 А Україна, B65BG27/24.Cпосiб керування роботою машини із коливними рухами робочих органів. П.С. Берник, Р.В. Чубик, В.А. Пашистий. (Україна). - № 200502375; Опубл. 15.12.2005; Бюл. № 12, 4 ст. 2. Пат. 92041 А Україна, B65G27/100. Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200806209; Опубл. 27.09.2010; Бюл. № 18, 3 ст. 3. Сергеев А.П. Исследование процесса обработки, механизация и автоматизация вспомогательных работ на машинах для объемной вибрационной обработки / А.П. Сергеев // Механизация процесса снятия заусенцев. МДНТП, - М.: 1966. - С. 74-85. 4. Сердюк Л.И. Различные подходы к оценке динамических, энергетических и технологических возможностей вибрационных машин / Л.И.Сердюк, Ю.А. Давыденко, Л.М. Осина // Вибрации в технике и технологиях. Всеукраїнський науково-технічний журнал, 2004. № 3 (35). - C. 113-117. 5. Копылов Ю.Р. Амплитудные и фазо-частотные характеристики вибрирующей рабочей среды / Ю.Р. Копылов // Вибрации в технике и технологиях. Труды III международной научнотехнической конференции. - Евпатория, 1998. - С. 133-137. 6. Членов В.А. Виброкипящий слой / В.А.Членов, Н.В. Михайлов. - М.: Наука, 1972. - 341 с. 7. Зеленцов Л.К. Влияние рабочей среды на колебания вибрационной установки для объемной обработки деталей / Л.К. Зеленцов // Состояние и перспективы промышленного освоения вибрационной обработки. - Ростов-на-Дону, 1974. - С. 37-41. 8. Франчук В.П. Разработка способов расчета нелинейных динамических систем вибрационных машин с существенным влиянием технологической нагрузки: Автореф. дис. дра.тех. наук / В.П. Франчук. - Днепропетровск: 1982. - 40 с. 9. Блехман И.И. Вибрационная механика / И.И. Блехман; [англ. перевод:BlekhmanI. I. Vibrational Mechanics. (Nonlinear Dynamic Effects, General Approach, Applications). Singapore et al: World Scientific Publishing Co., 2000. 510 p.]. - M.: Физматлит, 1994. 400 с. 10. Бабичев А.П. Основы вибрационной технологии / А.П. Бабичев, И.А. Бабичев. - Ростовна-Дону: Изд. центр ДГТУ, - 1999. - 621с. 4 UA 107715 U 5 11. Пат. 87776 А Україна, В65В G27/00. Спосіб керування роботою адаптивних вібраційних технологічних машин. Середа Л.П., Чубик Р.В., Ярошенко Л.В. (Україна). - № а200803685; опубл. 10.08.2009; Бюл. № 15. - 4 с. 12. Пат. 104108 UA Україна, В06В 1/16. Керований віброзбуджувач. Чубик Р.В., Ярошенко Л.В., Мокрицький Р.Б., Деньщіков О.Ю. (Україна). - № а201302007; Опубл. 25.12.2013; Бюл. № 24, 8 ст. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 Спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи d , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два параметри - частоту d та амплітуду Ad коливань робочого органу і у випадку зміни маси завантаження робочого органу або при необхідності зміни режиму роботи адаптивної вібраційної технологічної машини система керування корегує частоту та амплітуду вимушуючих коливань віброприводу робочого органу, до частоти d , яка 20 близька до резонансної частоти пружної коливної системи вібромашини при заданому завантаженні робочого органу, і амплітуду коливань робочого органу Ad на резонансній частоті, яка відрізняється тим, що виконувалась наступна умова 3 Ad ( Az2 z3 ) / d , де z та Az задані технологічно оптимальні параметри вібраційного поля адаптивної вібраційної технологічної машини. 5 UA 107715 U Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B65G 27/24
Мітки: корекції, машини, проникнення, спосіб, параметрів, органу, технологічної, глибини, матеріалу, коливань, низькочастотних, динамічних, стабілізації, сипучого, робочого, адаптивної, вібраційної, шарі
Код посилання
<a href="https://ua.patents.su/8-107715-sposib-korekci-dinamichnikh-parametriv-robochogo-organu-adaptivno-vibracijjno-tekhnologichno-mashini-dlya-stabilizaci-glibini-proniknennya-nizkochastotnikh-kolivan-v-shari-sipuchog.html" target="_blank" rel="follow" title="База патентів України">Спосіб корекції динамічних параметрів робочого органу адаптивної вібраційної технологічної машини для стабілізації глибини проникнення низькочастотних коливань в шари сипучого матеріалу</a>
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин

Номер патенту: 92041
Опубліковано: 27.09.2010
Автори: Ярошенко Леонід Вікторович, Середа Леонід Павлович, Чубик Роман Васильович
МПК: B65G 27/00
Мітки: вібраційних, стабілізації, спосіб, технологічної, вібраційного, машин, технологічних, параметрів, поля, адаптивних, оптимальних
Формула / Реферат:
Спосіб стабілізації технологічно оптимальних параметрів вібраційного поля адаптивних вібраційних технологічних машин, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи wd, підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, який відрізняється тим, що в процесі роботи адаптивної вібраційної технологічної машини система керування контролює два...
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах
Номер патенту: 105075
Опубліковано: 10.04.2014
Автори: Чубик Роман Васильович, Ярошенко Леонід Вікторович
МПК: B65G 27/24
Мітки: машинах, стабілізації, вібротранспортування, швидкості, вібраційних, горизонтального, адаптивних, технологічних, спосіб
Формула / Реферат:
Спосіб стабілізації швидкості горизонтального вібротранспортування в адаптивних вібраційних технологічних машинах, в якому система керування віброприводом, відслідковуючи власну частоту коливань механічної коливної системи , підтримує режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи адаптивної вібраційної технологічної...
Привод активного робочого органу сільськогосподарської машини
Номер патенту: 53653
Опубліковано: 11.10.2010
Автори: Топчій Сергій Іванович, Попик Павло Сергійович
МПК: A01B 35/00
Мітки: привод, органу, робочого, сільськогосподарсько, активного, машини
Формула / Реферат:
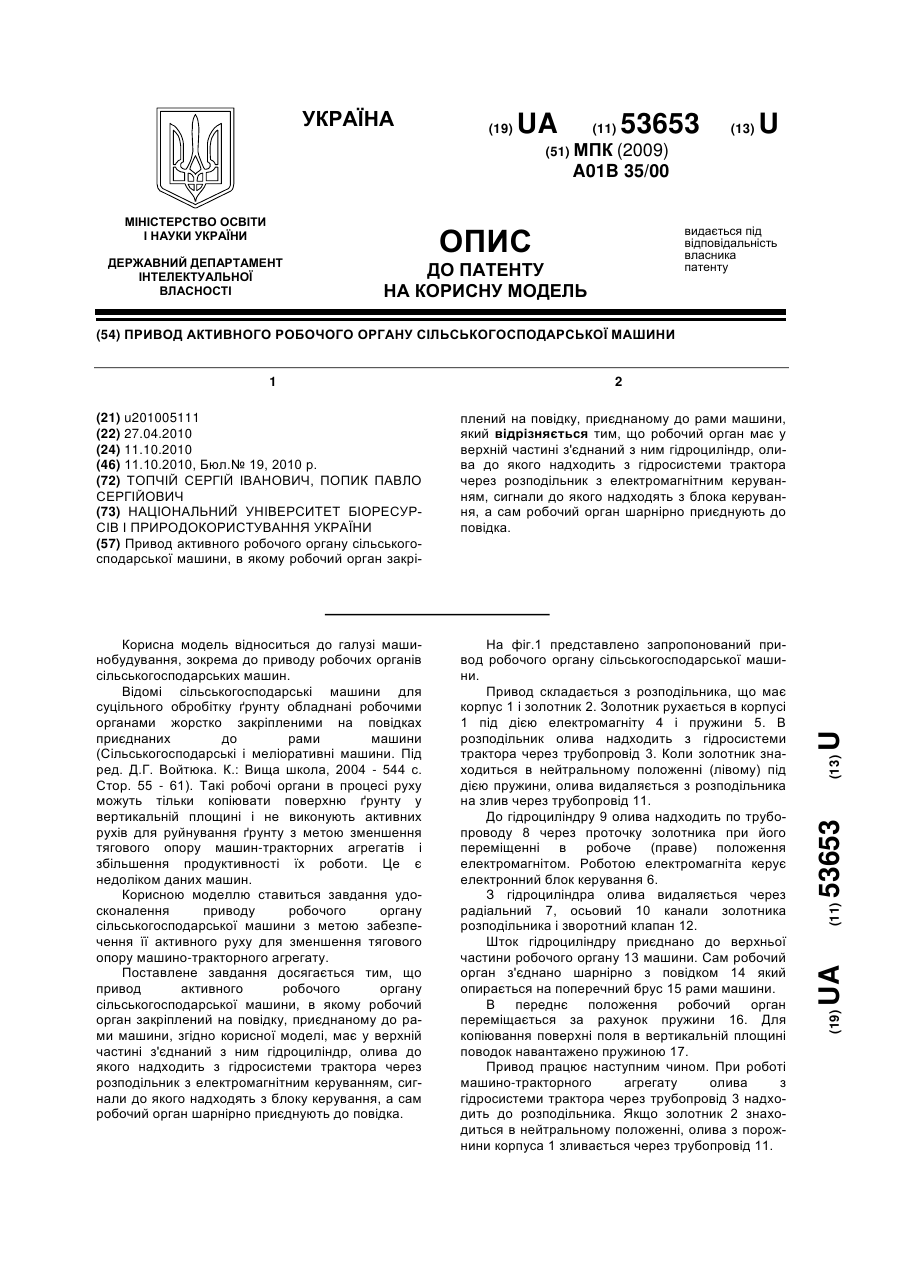
Привод активного робочого органу сільськогосподарської машини, в якому робочий орган закріплений на повідку, приєднаному до рами машини, який відрізняється тим, що робочий орган має у верхній частині з'єднаний з ним гідроциліндр, олива до якого надходить з гідросистеми трактора через розподільник з електромагнітним керуванням, сигнали до якого надходять з блока керування, а сам робочий орган шарнірно приєднують до повідка.
Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних вібраційних технологічних машинах
Номер патенту: 106526
Опубліковано: 10.09.2014
Автори: Чубик Роман Васильович, Ярошенко Леонід Вікторович
МПК: B65G 27/24
Мітки: швидкості, адаптивних, вібраційних, вертикального, машинах, спосіб, технологічних, вібротранспортування, стабілізації
Формула / Реферат:
Спосіб стабілізації швидкості вертикального вібротранспортування в адаптивних спіралеподібних вібраційних технологічних машинах, за яким за допомогою системи керування віброприводом, яка відслідковує власну частоту коливань механічної коливної системи , підтримують режим роботи адаптивної вібраційної технологічної машини, близький до резонансного, і в процесі роботи...
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом
Номер патенту: 22199
Опубліковано: 25.04.2007
Автор: Ланець Олексій Степанович
Мітки: параметрів, системі, електромагнітним, спосіб, вібраційної, коливальної, приводом, визначення, механічної, машини, тримасової
Формула / Реферат:
Спосіб визначення параметрів тримасової механічної коливальної системи вібраційної машини з електромагнітним приводом, згідно з яким за фіксованих двох коливальних мас вимірюють значення їх інерційних параметрів , а саме значення моменту інерції відносно власної центральної осі симетрії для крутильних коливань або значення маси для прямолінійних коливань, а значення...
Попередній патент: Спосіб виготовлення фактурного декоративного скла
Наступний патент: Регульований фільтрокомпенсуючий пристрій
Випадковий патент: Спосіб консервативного переривання завмерлої вагітності в ранні терміни