Спосіб визначення пропускної здатності нерегульованого перехрестя рівнозначних доріг
Формула / Реферат
Спосіб визначення пропускної здатності нерегульованого перехрестя рівнозначних доріг, при якому сканують зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями, причому оптичну вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь формують в одній площині з першим, але зі зміщенням на півперіоду по колу розгортки, а оптичні осі обох променів, що формують вхідні і вихідні межі контрольованих зон, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину, що дозволяє визначити моменти в'їзду і виїзду кожного транспортного засобу з контрольованої зони і перехрестя в цілому, швидкість, тип і їх напрямки руху по кожній смузі, коефіцієнти приведення до легкового автомобіля, інтервали їх руху та черги по всіх смугах, який відрізняється тим, що послідовно визначають інтервали перетину перехрестя різними типами транспорту з різних смуг і по різним напрямкам руху за моментами перетину спочатку переднім бампером лінії сканування першого променя на виході з контрольованої зони, а потім заднім бампером цієї ж лінії сканування на виході з перехрестя, кількість всіх транспортних засобів, що за час виміру повністю послідовно виїхали з контрольованої зони і зони перехрестя по всіх смугах руху, кількість додаткових транспортних засобів, які під час роз'їзду реальних транспортних засобів, згідно з існуючими правилами, мали можливість перетину перехрестя з вільних смуг, а моменти завершення перетину перехрестя в цьому випадку визначають або за моментами перетину лінії сканування першого променя на виході з перехрестя задніми бамперами транспортних засобів, або по закінченню максимального з інтервалів перетину для конкретного випадку, схему роз'їзду, за якої в разі відсутності транспортних засобів в контрольованій зоні і зоні всього перехрестя одночасно по правилам може рухатись максимальна кількість автомобілів, кількість накопичених транспортних засобів, що підраховують за час відсутності руху в зоні перехрестя по кількості можливих інтервалів перетину і можливій кількості транспортних засобів, що може рухатись через перехрестя, згідно зі схемою роз'їзду, а пропускну здатність за одиницю часу виміру визначають як суму всіх транспортних засобів, які повністю виїхали із зони перехрестя по всіх смугах руху, кількості додаткових транспортних засобів та кількості накопичених транспортних засобів, які штучно заповнюють вільні інтервали і забезпечують безперервний транспортний потік максимально можливої сумарної інтенсивності, що не приводить до заторового стану на перехресті.
Текст
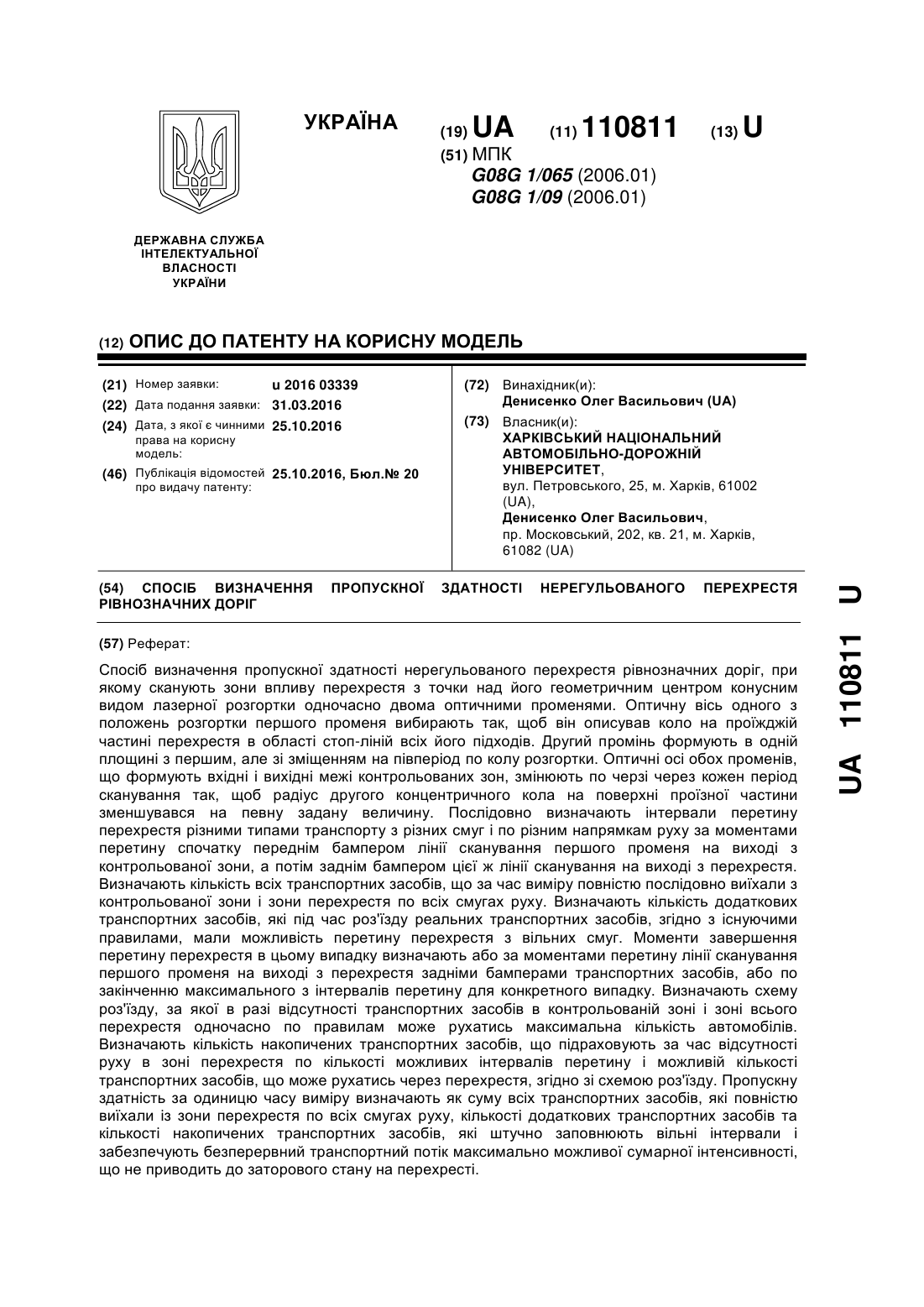
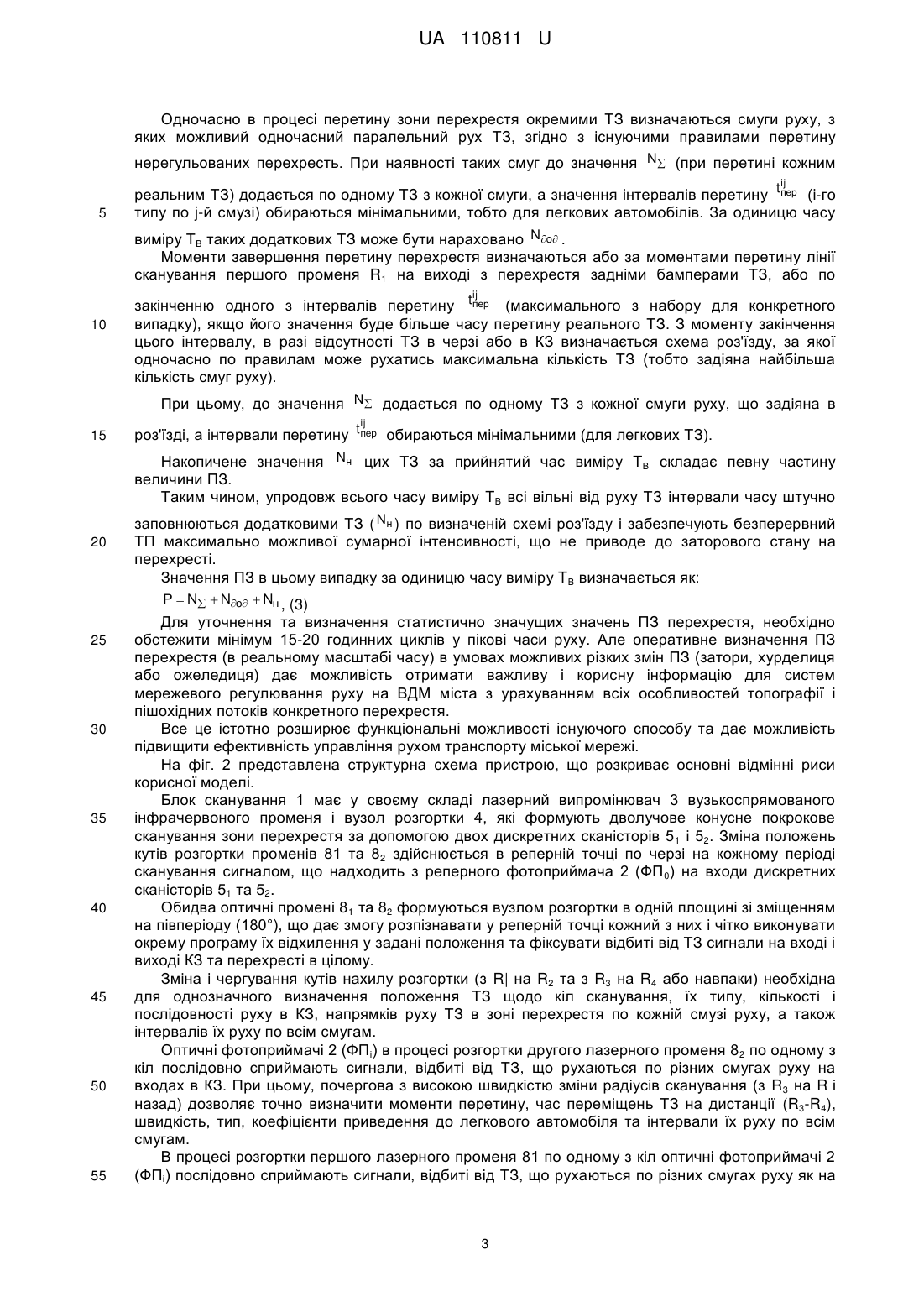
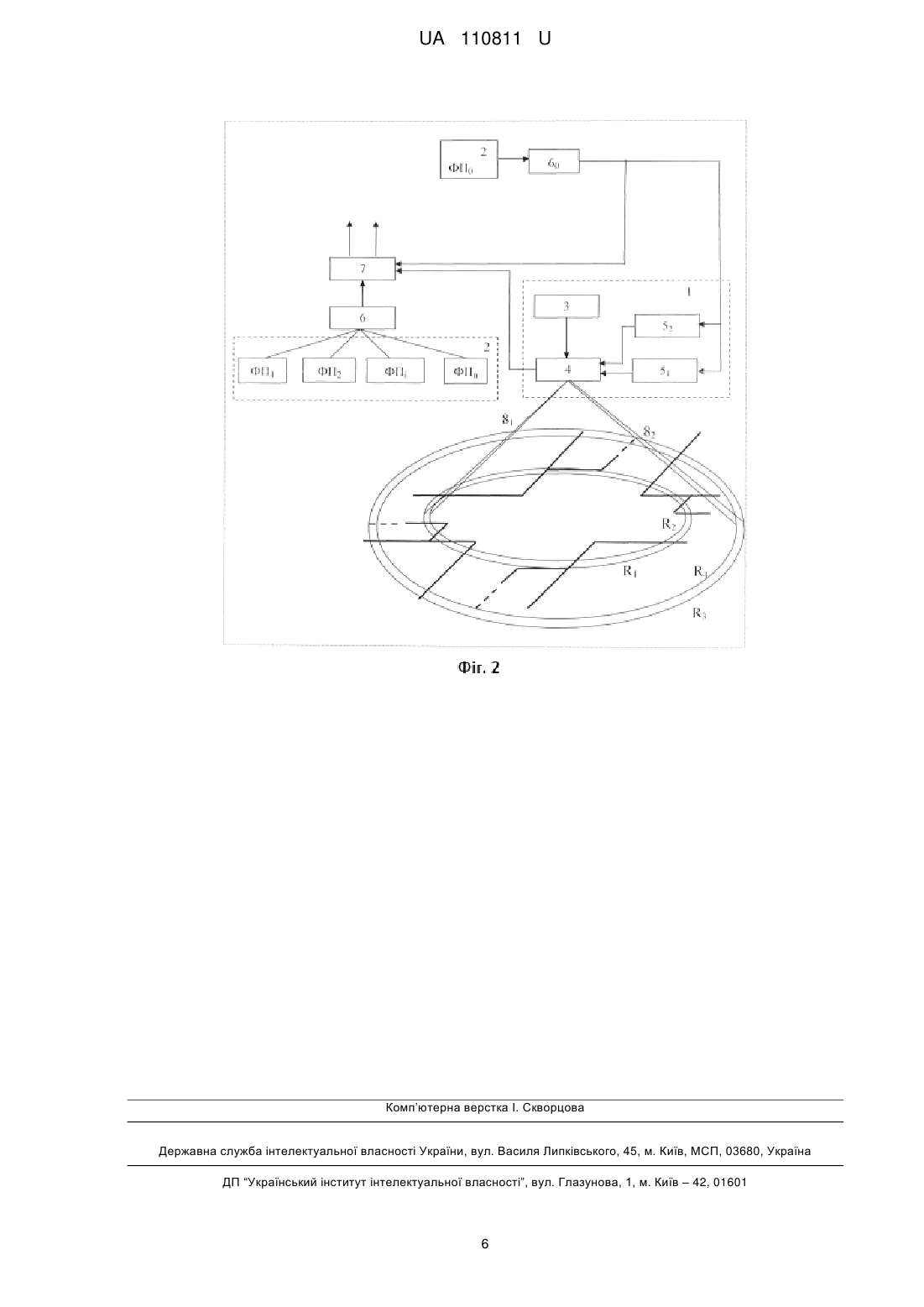
Реферат: Спосіб визначення пропускної здатності нерегульованого перехрестя рівнозначних доріг, при якому сканують зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями. Оптичну вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів. Другий промінь формують в одній площині з першим, але зі зміщенням на півперіод по колу розгортки. Оптичні осі обох променів, що формують вхідні і вихідні межі контрольованих зон, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину. Послідовно визначають інтервали перетину перехрестя різними типами транспорту з різних смуг і по різним напрямкам руху за моментами перетину спочатку переднім бампером лінії сканування першого променя на виході з контрольованої зони, а потім заднім бампером цієї ж лінії сканування на виході з перехрестя. Визначають кількість всіх транспортних засобів, що за час виміру повністю послідовно виїхали з контрольованої зони і зони перехрестя по всіх смугах руху. Визначають кількість додаткових транспортних засобів, які під час роз'їзду реальних транспортних засобів, згідно з існуючими правилами, мали можливість перетину перехрестя з вільних смуг. Моменти завершення перетину перехрестя в цьому випадку визначають або за моментами перетину лінії сканування першого променя на виході з перехрестя задніми бамперами транспортних засобів, або по закінченню максимального з інтервалів перетину для конкретного випадку. Визначають схему роз'їзду, за якої в разі відсутності транспортних засобів в контрольованій зоні і зоні всього перехрестя одночасно по правилам може рухатись максимальна кількість автомобілів. Визначають кількість накопичених транспортних засобів, що підраховують за час відсутності руху в зоні перехрестя по кількості можливих інтервалів перетину і можливій кількості транспортних засобів, що може рухатись через перехрестя, згідно зі схемою роз'їзду. Пропускну здатність за одиницю часу виміру визначають як суму всіх транспортних засобів, які повністю виїхали із зони перехрестя по всіх смугах руху, кількості додаткових транспортних засобів та кількості накопичених транспортних засобів, які штучно заповнюють вільні інтервали і забезпечують безперервний транспортний потік максимально можливої сумарної інтенсивності, що не приводить до заторового стану на перехресті. UA 110811 U (12) UA 110811 U UA 110811 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до систем регулювання дорожнього руху (ДР) і може бути використана при розробці агрегатної системи засобів управління ДР, при розробці АСУ-ДР, в системах інформаційного забезпечення завантаження перехресть ВДМ, а також для підвищення ефективності управління рухом транспорту міської мережі. Корисна модель може бути використана для одночасного визначення основних параметрів транспортних потоків (ТП): моменту проїзду транспортним засобом (ТЗ) контрольованої зони (КЗ) та перехрестя в цілому, швидкості, типу і напрямку руху ТЗ, їх інтенсивності руху по кожній смузі за будь-який проміжок часу, інтервалів рухів між ТЗ та їх черги на підходах до перехрестя по кожній смузі другорядних доріг. Відомим аналогом є спосіб визначення затримок транспортних засобів на нерегульованому перехресті, заснований на скануванні двома гостроспрямованими лазерними променями зони перехрестя з точки над його геометричним центром конусним видом розгортки одночасно всіх підходів і виходів перехрестя, що дає можливість забезпечити визначення комплексу вищевказаних параметрів ТП по кожній смузі руху в залежності від результатів сканування. Оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя радіусом (R1) в області "стоп-ліній" всіх його підходів, а друге положення розгортки відповідає відхиленню лазерного променя, при якому радіус (R2) другого концентричного кола на поверхні проїзної частини зменшується на певну задану величину (R1-R2=1 м), при цьому формується вихідна межа КЗ, а зміна положень розгортки здійснюється з високою швидкістю по черзі через кожен період сканування. Другий оптичний промінь лазерної розгортки формується у одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. фіг. 2) і формує вхідну межу КЗ.Цей промінь, як і перший, за допомогою відповідного дискретного сканістора на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R3 на проїжджій частині перехрестя) на іншу (з радіусом R4) і формує два концентричних кола з різницею радіусів R3-R4=1 м. Оптичні фотоприймачі в процесі розгортки лазерного променя по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. При цьому, почергова з високою швидкістю зміна радіусів сканування дозволяє точно визначити моменти перетину кожним ТЗ входу і виходу КЗ, швидкість і тип ТЗ, довжину черги, їх інтенсивність і інтервали руху між ТЗ по кожній смузі в зоні "стоп-ліній" і на вході в КЗ. Фіксацію ТЗ, що в'їжджають в КЗ і виїжджають з неї, здійснюють по їх задніх бамперах при пересіченні одного з кіл (наприклад R3 та R1). Це дозволяє підвищити точність визначення загальних транспортних затримок на нерегульованому перехресті за рахунок врахування затримок не тільки в КЗ, але і в зоні перехрестя та на його виході, а також затримки ТЗ по смугах головної дороги, цей спосіб вибраний з а найближчий аналог до корисної моделі (Опис до патенту на винахід № 105751 від 10.06…2014 р., бюл. № 11/2014). Недоліком найближчого аналога є вузькі функціональні можливості, оскільки він не дозволяє визначити такий важливий параметр нерегульованого перехрестя, як його пропускна здатність (ПЗ). Це пов'язано з тим, що для визначення ПЗ нерегульованого перехрестя окрім вищевказаних параметрів руху ТП на підходах до перехрестя необхідно визначати критичні інтервали руху для всіх типів ТЗ з урахуванням їх різних напрямків руху з усіх смуг перехрестя, а також враховувати відомі правила перетину нерегульованих перехресть рівнозначних доріг. В основу корисної моделі поставлена задача розширення функціональних можливостей існуючого способу, що дає можливість одночасно з виміром вищевказаних параметрів визначати і ПЗ нерегульованого перехрестя рівнозначних доріг. Поставлена задача вирішується тим, що у спосіб покладено конусне покрокове сканування одночасно двома вузько спрямованими лазерними променями інфрачервоного діапазону тимчасово всіх підходів і виходів перехрестя, що дає можливість забезпечити визначення комплексу необхідних параметрів ТП по кожній смузі руху в залежності від результатів сканування. Корисна модель пояснюється кресленнями. На фіг. 1 представлена схема, яка розкриває основні відмінні особливості корисної моделі і послідовність її дій. Відповідно до корисної моделі, розгортку лазерного променя здійснюють блоком сканування 1, який розташовується над перехрестям на спеціальному кронштейні в точці, що відповідає геометричному центру перехрестя. У блоці сканування, залежно від висоти його розміщення, одну з оптичних осей розгортки підбирають так, щоб перший лазерний промінь описував конусну поверхню з колом на проїжджій частині перехрестя (R1) в області 1 UA 110811 U 5 10 15 20 25 "стоп-ліній" всіх його підходів. До складу скануючого блока входять оптичні відхиляючі пристрої (дискретні сканістори), один з яких забезпечує відхилення осі першого лазерного променя в необхідне друге положення, при якому радіус кола (R2) на поверхні проїзної частини зменшується на задану величину (наприклад на 1 м). Таким чином, блок сканування на кожному наступному періоді сканування змінює розгортку першого лазерного променя з одної оптичної осі на іншу та описує в зоні перехрестя на його поверхні два концентричні кола з різницею радіусів (R1-R2=1м). Другий оптичний промінь лазерної розгортки формується в одній площині з першим, але зі зміщенням на 180° по колу розгортки (див. фіг. 2). Цей промінь, як і перший, за допомогою відповідного дискретного сканістора 52 на кожному наступному періоді сканування змінює одну оптичну вісь розгортки (з радіусом кола R3 на проїжджій частині перехрестя) на іншу (з радіусом кола R4) і формує два концентричних кола з різницею радіусів R3-R4=1 м. Оптичні фотоприймачі 2 (ФПі) в процесі розгортки лазерних променів 81 та 82 по одному з кіл на вході і виході КЗ послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на підходах, так і на виходах перехрестя. Фіксацію ТЗ, що в'їжджають в КЗ, здійснюють по їх задніх бамперах при пересіченні одного з кіл (наприклад R3), при цьому завдяки періодичному скануванню зі зміною оптичної осі лазерного променя (з радіуса R3 на R4 і навпаки) визначається момент в'їзду, швидкість, довжина, тип, кількість і послідовність ТЗ, що реально в'їхали в КЗ по кожній смузі руху за період вимірювань. Радіус R3, що формує вхідну межу КЗ, вибирають таким чином, щоб він перевищував найбільш можливу чергу ТЗ, яка може збиратися по одній зі смуг руху на підходах до перехрестя. Інформація про довжину, тип та час пересування ТЗ на вході в КЗ або в зоні "стоп-ліній" дозволяє послідовно визначити реальні значення коефіцієнтів приведення до легкового автомобілю К ПРі як відношення величини середнього значення часового інтервалу t ві проїзду дистанції R3-R4=1м (або R1 – R2=1м) конкретним типом ТЗ до величини середнього значення часового інтервалу t лі проїзду цієї дистанції легковим автомобілем: К ПРі t ві / t лі . (1) 30 35 40 45 50 Вимірювання цього параметру на вході і виході КЗ, на вході і виході з перехрестя дозволяє не тільки чітко визначити напрямки руху кожного ТЗ по кожній смузі перехрестя, але і прив'язати до цього параметру конкретні значення граничних інтервалів в залежності від типу ТЗ, смуг і напрямків їх руху. Фіксація ТЗ, що повністю покинули зону перехрестя здійснюється за моментами перетинання їх задніми бамперами кола сканування з радіусом R1 на виході перехрестя одночасно по всіх смугах руху. В процесі роз'їзду ТЗ через перехрестя визначаються реальні значення інтервалів перетину tпep для ТЗ різного типу, різних напрямків і смуг руху, які враховують різноманітні особливості топографії конкретного перехрестя, швидкісних якостей ТЗ і наявності пішохідних потоків. Значення інтервалів перетину tпep визначаються за моментами перетину переднім бампером ТЗ спочатку лінії сканування першого променю на виході з КЗ (наприклад R1), а потім заднім бампером цієї ж лінії сканування на виході з перехрестя. Практичне визначення реальних значень tпep для умов конкретного перехрестя дає змогу накопичувати інформацію для всіх типів інтервалів у обчислювальному пристрої 7 (див. фіг. 2) і при необхідності з часом корегувати ці значення при зміні умов руху (наприклад для зими або ожеледиці, наявності пішохідних потоків). Більш того, можливість виміру швидкості та типу ТЗ на вході і виході КЗ дає змогу розділити і окремо використовувати значення tпep для умов, коли ТЗ проїжджають КЗ, а потім і перехрестя без зупинки, і коли вони зупиняються перед стоплінією. Процес визначення ПЗ нерегульованого перехрестя рівнозначних доріг за прийнятий час виміру ТВ включає спочатку підрахунок всіх ТЗ, що за цей час повністю послідовно виїхали з КЗ і зони перехрестя по всіх смугах руху n N Nфj j 1 55 , (2) де Nфj - кількість усіх ТЗ, що виїхали з зони перехрестя по кожній і-й смузі у фізичних одиницях. 2 UA 110811 U Одночасно в процесі перетину зони перехрестя окремими ТЗ визначаються смуги руху, з яких можливий одночасний паралельний рух ТЗ, згідно з існуючими правилами перетину нерегульованих перехресть. При наявності таких смуг до значення N (при перетині кожним ij 5 реальним ТЗ) додається по одному ТЗ з кожної смуги, а значення інтервалів перетину t пер (і-го типу по j-й смузі) обираються мінімальними, тобто для легкових автомобілів. За одиницю часу виміру ТВ таких додаткових ТЗ може бути нараховано No . Моменти завершення перетину перехрестя визначаються або за моментами перетину лінії сканування першого променя R1 на виході з перехрестя задніми бамперами ТЗ, або по ij 10 закінченню одного з інтервалів перетину t пер (максимального з набору для конкретного випадку), якщо його значення буде більше часу перетину реального ТЗ. З моменту закінчення цього інтервалу, в разі відсутності ТЗ в черзі або в КЗ визначається схема роз'їзду, за якої одночасно по правилам може рухатись максимальна кількість ТЗ (тобто задіяна найбільша кількість смуг руху). При цьому, до значення N додається по одному ТЗ з кожної смуги руху, що задіяна в 15 ij роз'їзді, а інтервали перетину t пер обираються мінімальними (для легкових ТЗ). Накопичене значення Nн цих ТЗ за прийнятий час виміру TВ складає певну частину величини ПЗ. Таким чином, упродовж всього часу виміру TВ всі вільні від руху ТЗ інтервали часу штучно 20 заповнюються додатковими ТЗ ( Nн ) по визначеній схемі роз'їзду і забезпечують безперервний ТП максимально можливої сумарної інтенсивності, що не приводе до заторового стану на перехресті. Значення ПЗ в цьому випадку за одиницю часу виміру TВ визначається як: Р N No Nн , (3) 25 30 35 40 45 50 55 Для уточнення та визначення статистично значущих значень ПЗ перехрестя, необхідно обстежити мінімум 15-20 годинних циклів у пікові часи руху. Але оперативне визначення ПЗ перехрестя (в реальному масштабі часу) в умовах можливих різких змін ПЗ (затори, хурделиця або ожеледиця) дає можливість отримати важливу і корисну інформацію для систем мережевого регулювання руху на ВДМ міста з урахуванням всіх особливостей топографії і пішохідних потоків конкретного перехрестя. Все це істотно розширює функціональні можливості існуючого способу та дає можливість підвищити ефективність управління рухом транспорту міської мережі. На фіг. 2 представлена структурна схема пристрою, що розкриває основні відмінні риси корисної моделі. Блок сканування 1 має у своєму складі лазерний випромінювач 3 вузькоспрямованого інфрачервоного променя і вузол розгортки 4, які формують дволучове конусне покрокове сканування зони перехрестя за допомогою двох дискретних сканісторів 5 1 і 52. Зміна положень кутів розгортки променів 81 та 82 здійснюється в реперній точці по черзі на кожному періоді сканування сигналом, що надходить з реперного фотоприймача 2 (ФП 0) на входи дискретних сканісторів 51 та 52. Обидва оптичні промені 81 та 82 формуються вузлом розгортки в одній площині зі зміщенням на півперіоду (180°), що дає змогу розпізнавати у реперній точці кожний з них і чітко виконувати окрему програму їх відхилення у задані положення та фіксувати відбиті від ТЗ сигнали на вході і виході КЗ та перехресті в цілому. Зміна і чергування кутів нахилу розгортки (з R| на R2 та з R3 на R4 або навпаки) необхідна для однозначного визначення положення ТЗ щодо кіл сканування, їх типу, кількості і послідовності руху в КЗ, напрямків руху ТЗ в зоні перехрестя по кожній смузі руху, а також інтервалів їх руху по всім смугам. Оптичні фотоприймачі 2 (ФПі) в процесі розгортки другого лазерного променя 8 2 по одному з кіл послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху на входах в КЗ. При цьому, почергова з високою швидкістю зміни радіусів сканування (з R3 на R і назад) дозволяє точно визначити моменти перетину, час переміщень ТЗ на дистанції (R3-R4), швидкість, тип, коефіцієнти приведення до легкового автомобіля та інтервали їх руху по всім смугам. В процесі розгортки першого лазерного променя 81 по одному з кіл оптичні фотоприймачі 2 (ФПі) послідовно сприймають сигнали, відбиті від ТЗ, що рухаються по різних смугах руху як на 3 UA 110811 U 5 10 15 20 25 підходах, так і на виходах перехрестя. При цьому, почергова з високою швидкістю зміна радіусів сканування (з R1 на R2 і навпаки) дозволяє точно визначити моменти виїзду кожного ТЗ з КЗ, час їх переміщення на дистанції (R1-R2), їх швидкості руху, а потім послідовно довжину, тип, коефіцієнти приведення ТЗ до легкового автомобіля, інтервали їх руху по всім смугам, число ТЗ, що покинули КЗ по кожній смузі за будь-яке фіксоване значення часу виміру ТВ, а також черги ТЗ перед стоп-лінією по смугам другорядних доріг перехрестя. Порівняння усіх цих параметрів ТЗ в зоні сканування (R1-R2) на виході з КЗ та на виході з перехрестя дає змогу чітко визначити напрямки руху ТЗ по усіх смугах в зоні перехрестя та інтервали перетину tпеp для різних типів ТЗ, смуг і напрямків руху з урахуванням усіх топографічних особливостей конкретного перехрестя і наявності пішохідних потоків. Перетворювач 6 сигналів кожного ФПі відповідної смуги руху перетворює їх в імпульсноцифрові коди, які вводяться в обчислювальний пристрій 7, де далі визначаються всі вище перелічені параметри за будь-який час виміру (або необхідну кількість циклів виміру). Для цього на входи обчислювального пристрою 7 подаються сигнали з блока сканування 1 та перетворювача сигналів реперного фотоприймача 60. Якщо в обчислювальний пристрій 7 закладається алгоритм, правила і константи, відповідні діапазонам тимчасових інтервалів руху ТЗ у зоні перехрестя при всіляких змінах напрямків їх руху по смугах, зберігається і накопичується інформація про моменти перетину ТЗ входу і виходу з КЗ, коефіцієнти приведення, склад ТЗ та поточні значення черг ТЗ по смугах другорядних доріг, тоді з'являється можливість визначення не тільки усіх перелічених вище параметрів, але і значення інтервалів перетину tпep для різноманітних умов руху по смугах другорядних доріг та ПЗ нерегульованого перехрестя. Таким чином, запропонований спосіб дає можливість одержання найбільш повного комплексу інформації для контролю ТП, визначення інтервалів перетину і ПЗ нерегульованих перехресть з урахуванням всіх топографічних особливостей конкретного перехрестя і змін умов руху. Перевагою запропонованого способу також є те, що його реалізацію можна здійснити одним загальним пристроєм, розташованим в зоні перехрестя для контролю широкого спектра параметрів руху ТП. 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 45 50 55 60 Спосіб визначення пропускної здатності нерегульованого перехрестя рівнозначних доріг, при якому сканують зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями, причому оптичну вісь одного з положень розгортки першого променя вибирають так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а другий промінь формують в одній площині з першим, але зі зміщенням на півперіоду по колу розгортки, а оптичні осі обох променів, що формують вхідні і вихідні межі контрольованих зон, змінюють по черзі через кожен період сканування так, щоб радіус другого концентричного кола на поверхні проїзної частини зменшувався на певну задану величину, що дозволяє визначити моменти в'їзду і виїзду кожного транспортного засобу з контрольованої зони і перехрестя в цілому, швидкість, тип і їх напрямки руху по кожній смузі, коефіцієнти приведення до легкового автомобіля, інтервали їх руху та черги по всіх смугах, який відрізняється тим, що послідовно визначають інтервали перетину перехрестя різними типами транспорту з різних смуг і по різним напрямкам руху за моментами перетину спочатку переднім бампером лінії сканування першого променя на виході з контрольованої зони, а потім заднім бампером цієї ж лінії сканування на виході з перехрестя, кількість всіх транспортних засобів, що за час виміру повністю послідовно виїхали з контрольованої зони і зони перехрестя по всіх смугах руху, кількість додаткових транспортних засобів, які під час роз'їзду реальних транспортних засобів, згідно з існуючими правилами, мали можливість перетину перехрестя з вільних смуг, а моменти завершення перетину перехрестя в цьому випадку визначають або за моментами перетину лінії сканування першого променя на виході з перехрестя задніми бамперами транспортних засобів, або по закінченню максимального з інтервалів перетину для конкретного випадку, схему роз'їзду, за якої в разі відсутності транспортних засобів в контрольованій зоні і зоні всього перехрестя одночасно по правилам може рухатись максимальна кількість автомобілів, кількість накопичених транспортних засобів, що підраховують за час відсутності руху в зоні перехрестя по кількості можливих інтервалів перетину і можливій кількості транспортних засобів, що може рухатись через перехрестя, згідно зі схемою роз'їзду, а пропускну здатність за одиницю часу виміру визначають як суму всіх транспортних засобів, які повністю виїхали із зони перехрестя по всіх 4 UA 110811 U смугах руху, кількості додаткових транспортних засобів та кількості накопичених транспортних засобів, які штучно заповнюють вільні інтервали і забезпечують безперервний транспортний потік максимально можливої сумарної інтенсивності, що не приводить до заторового стану на перехресті. 5 UA 110811 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G08G 1/09, G08G 1/065
Мітки: доріг, нерегульованого, рівнозначних, визначення, пропускної, перехрестя, спосіб, здатності
Код посилання
<a href="https://ua.patents.su/8-110811-sposib-viznachennya-propuskno-zdatnosti-neregulovanogo-perekhrestya-rivnoznachnikh-dorig.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення пропускної здатності нерегульованого перехрестя рівнозначних доріг</a>
Спосіб визначення пропускної здатності нерегульованого перехрестя з головною і другорядною дорогами
Номер патенту: 110804
Опубліковано: 25.10.2016
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: пропускної, другорядною, визначення, здатності, спосіб, дорогами, перехрестя, головною, нерегульованого
Формула / Реферат:
Спосіб визначення пропускної здатності нерегульованого перехрестя з головною і другорядною дорогами, який заснований на скануванні зони впливу перехрестя з точки над його геометричним центром конусним видом лазерної розгортки одночасно двома оптичними променями, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а...
Спосіб визначення пропускної здатності регульованого перехрестя
Номер патенту: 101064
Опубліковано: 25.08.2015
Автор: Денисенко Олег Васильович
МПК: G08G 1/01
Мітки: перехрестя, визначення, здатності, спосіб, пропускної, регульованого
Формула / Реферат:
Спосіб визначення пропускної здатності регульованого перехрестя, що заснований на скануванні одночасно трьома гостроспрямованими лазерними променями зони перехрестя з точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало...
Спосіб визначення пропускної здатності ділянки доріг
Номер патенту: 110803
Опубліковано: 25.10.2016
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: пропускної, спосіб, доріг, визначення, ділянки, здатності
Формула / Реферат:
Спосіб визначення пропускної здатності ділянки доріг, який заснований на скануванні одночасно двома гостроспрямованими лазерними променями вхідних і вихідних меж ділянки з точки, що відповідає середині проїжджої частини, причому забезпечується відхилення осі кожного лазерного променя в необхідне друге положення, при якому у поперечному розрізі дороги на вході і виході ділянки на її поверхні утворюються дві паралельні лінії з певною...
Спосіб визначення параметрів транспортних потоків у зоні перехрестя
Номер патенту: 71913
Опубліковано: 25.07.2012
Автори: Денисенко Олег Васильович, Левтеров Андрій Іванович, Ярута Антон Миколайович
МПК: G08G 1/09
Мітки: потоків, спосіб, перехрестя, зони, визначення, параметрів, транспортних
Формула / Реферат:
Спосіб визначення параметрів транспортних потоків у зоні перехрестя, заснований на скануванні гостроспрямованого лазерного променя поперечного перерізу багатосмугової дороги спеціальним дискретним сканістором за програмою, що забезпечує відхилення лазерного випромінювання в необхідне число положень, що відповідає числу смуг дороги, прийомі відображених оптичних сигналів фотоприймачем і надалі перетворенні цих сигналів в імпульсно-числовий...
Спосіб визначення фазових коефіцієнтів регульованого перехрестя
Номер патенту: 88669
Опубліковано: 25.03.2014
Автор: Денисенко Олег Васильович
МПК: G08G 1/09
Мітки: перехрестя, фазових, коефіцієнтів, визначення, спосіб, регульованого
Формула / Реферат:
Спосіб визначення фазових коефіцієнтів регульованого перехрестя, що включає сканування двома гостроспрямованими лазерними променями зони перехрестя в точці над його геометричним центром конусним видом розгортки, причому оптична вісь одного з положень розгортки першого променя вибирається так, щоб він описував коло на проїжджій частині перехрестя в області стоп-ліній всіх його підходів, а друге положення розгортки відповідало відхиленню...
Попередній патент: Спосіб перетворення сонячної та кінетичної енергії в електричну за допомогою дорожнього покриття
Наступний патент: Спосіб виробництва гарячекатаного прокату підвищеної міцності
Випадковий патент: Мобільний агрегат для приготування пресованого біопалива