Спосіб візуалізації зміни параметрів сигналів інформаційних вузлів в одному кластері
Номер патенту: 120486
Опубліковано: 10.11.2017
Автори: Томаш Ґанцарчик син Яна, Чиж Віталій Михайлович, Карпінський Володимир Миколайович, Балабан Степан Миколайович, Міколай Карпіньскі син Пйотра, Павел Філіп Фалат син Пйотра

Формула / Реферат
Спосіб візуалізації зміни параметрів сигналів інформаційних вузлів в одному кластері, що полягає у моделюванні бездротової сенсорної мережі шляхом вимірювання відстані між інформаційними вузлами на підставі рівня параметра прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні мережі інформаційних вузлів, обчислюванні віртуальної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ![]() , які при побудові мають форму ромбів, де
, які при побудові мають форму ромбів, де ![]() - сигнальна точка,
- сигнальна точка, ![]() ,
, ![]() ,
, ![]() ,
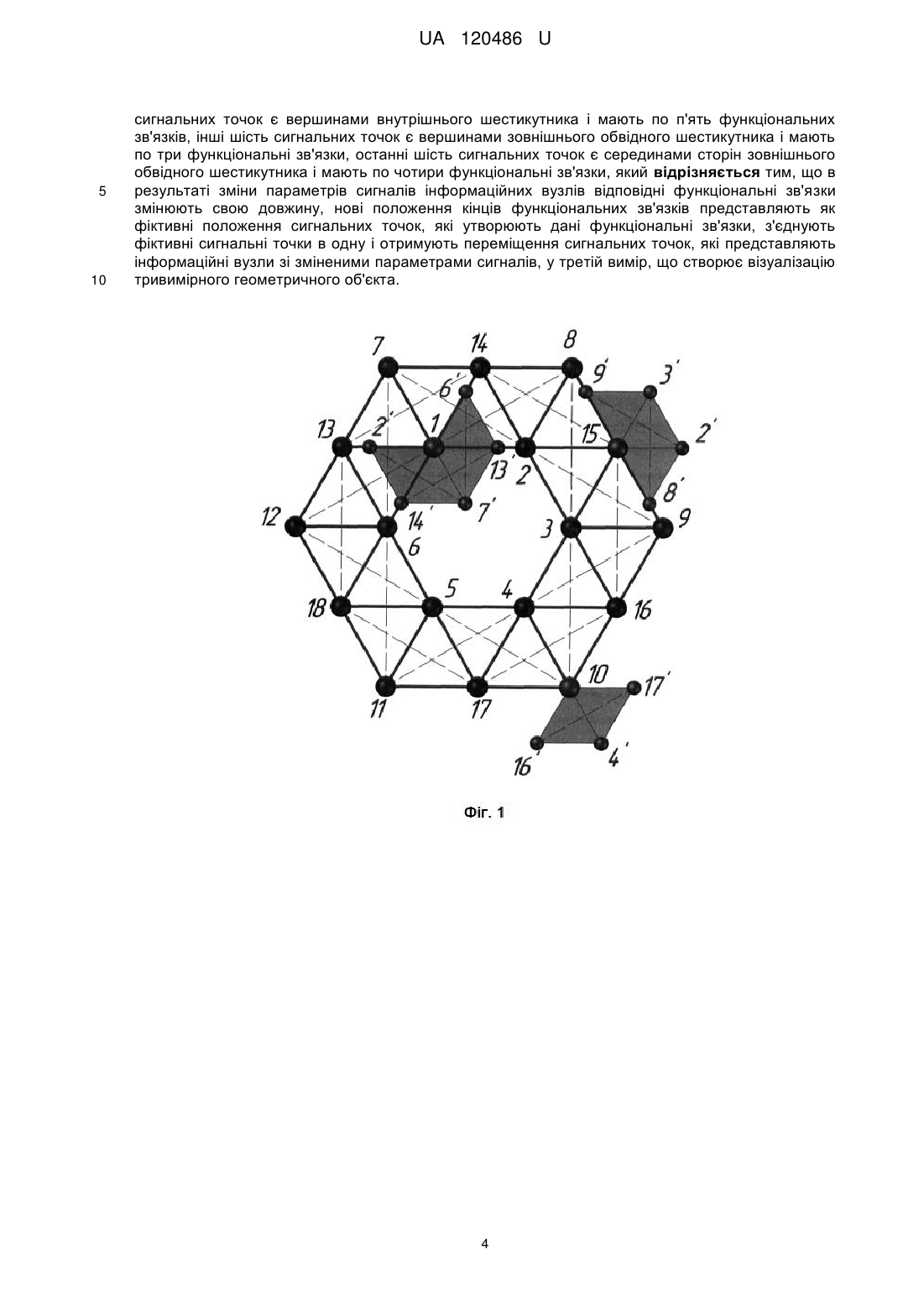
, ![]() - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, при цьому кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки, який відрізняється тим, що в результаті зміни параметрів сигналів інформаційних вузлів відповідні функціональні зв'язки змінюють свою довжину, нові положення кінців функціональних зв'язків представляють як фіктивні положення сигнальних точок, які утворюють дані функціональні зв'язки, з'єднують фіктивні сигнальні точки в одну і отримують переміщення сигнальних точок, які представляють інформаційні вузли зі зміненими параметрами сигналів, у третій вимір, що створює візуалізацію тривимірного геометричного об'єкта.
- номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, при цьому кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки, який відрізняється тим, що в результаті зміни параметрів сигналів інформаційних вузлів відповідні функціональні зв'язки змінюють свою довжину, нові положення кінців функціональних зв'язків представляють як фіктивні положення сигнальних точок, які утворюють дані функціональні зв'язки, з'єднують фіктивні сигнальні точки в одну і отримують переміщення сигнальних точок, які представляють інформаційні вузли зі зміненими параметрами сигналів, у третій вимір, що створює візуалізацію тривимірного геометричного об'єкта.
Текст
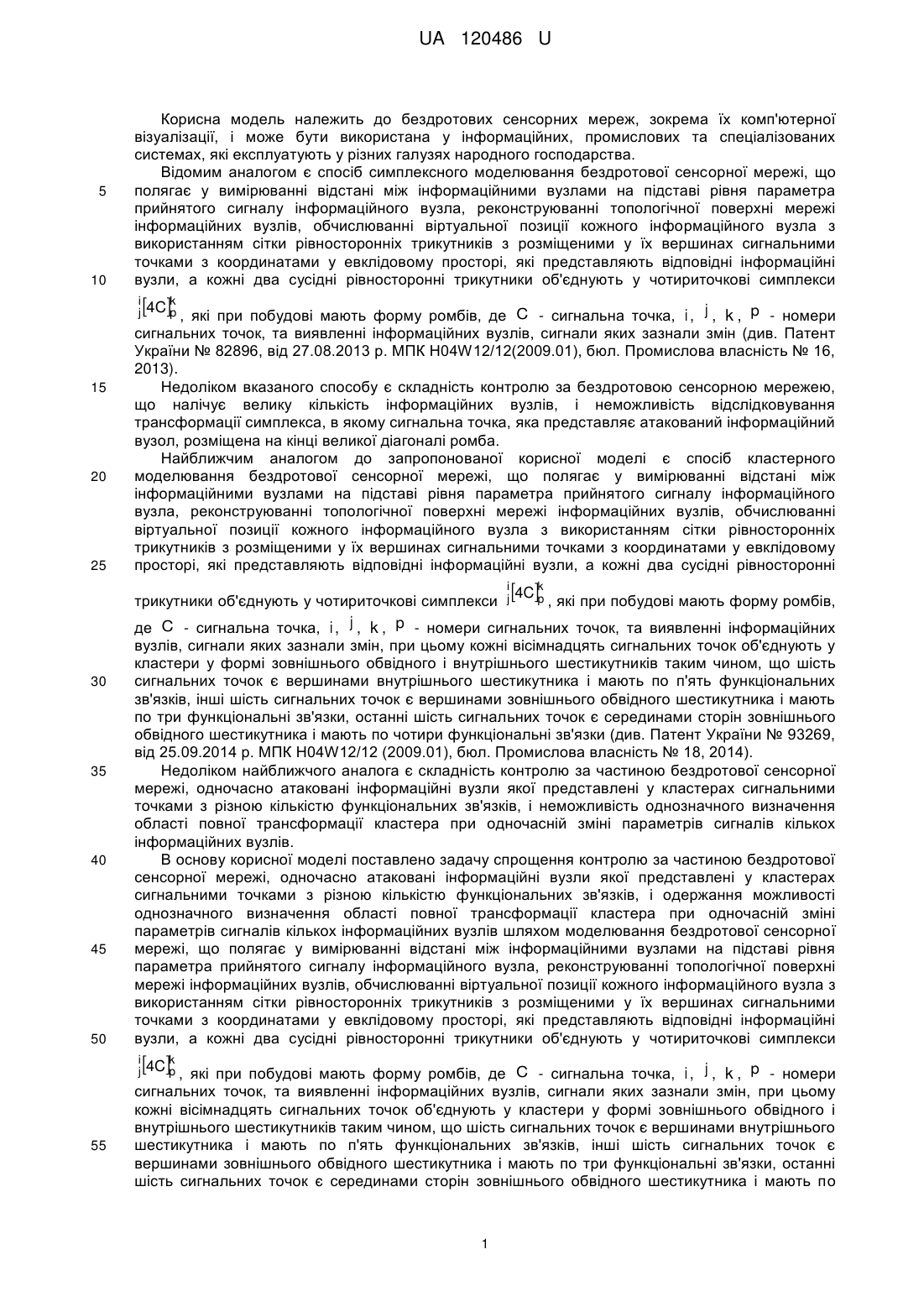
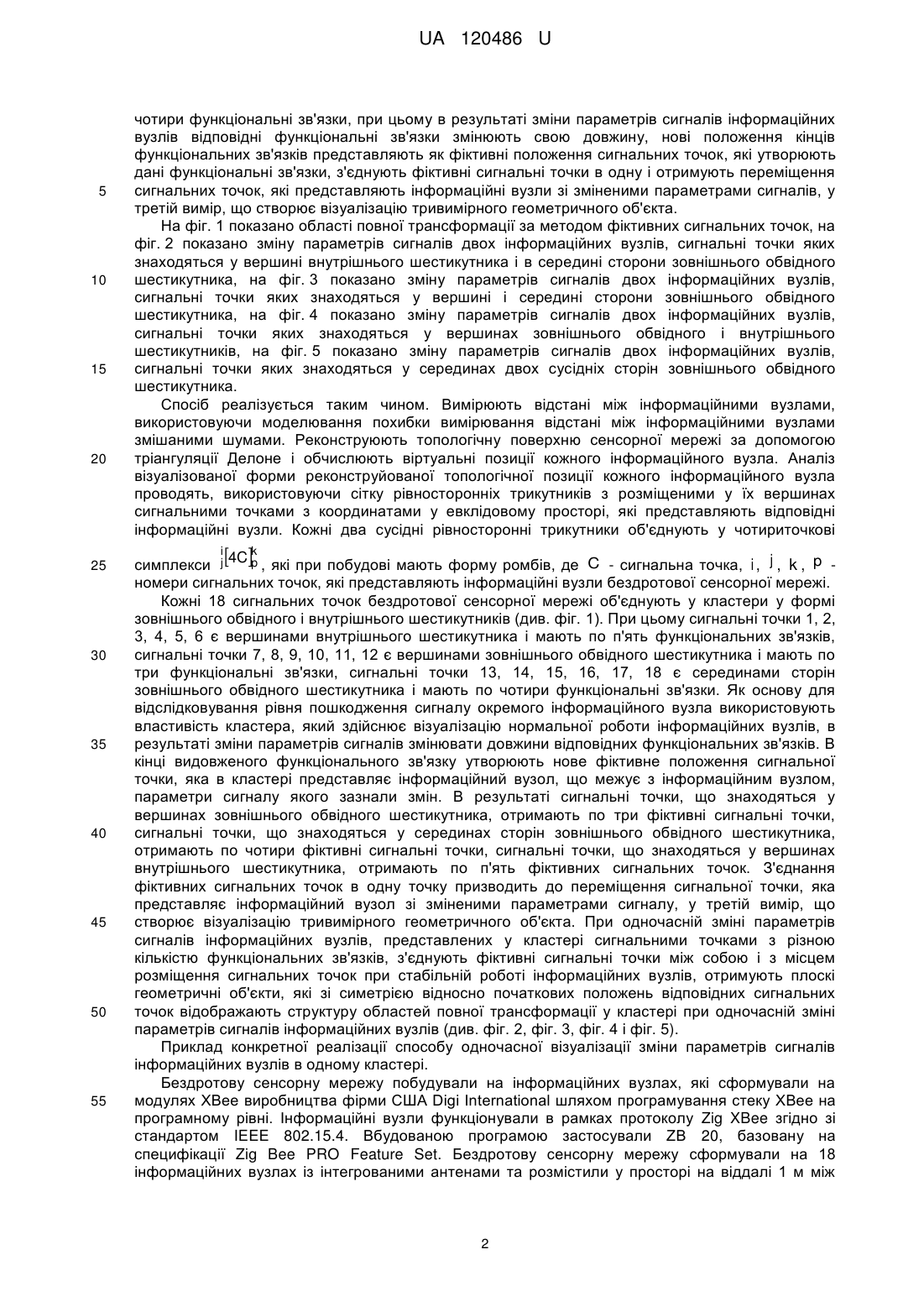
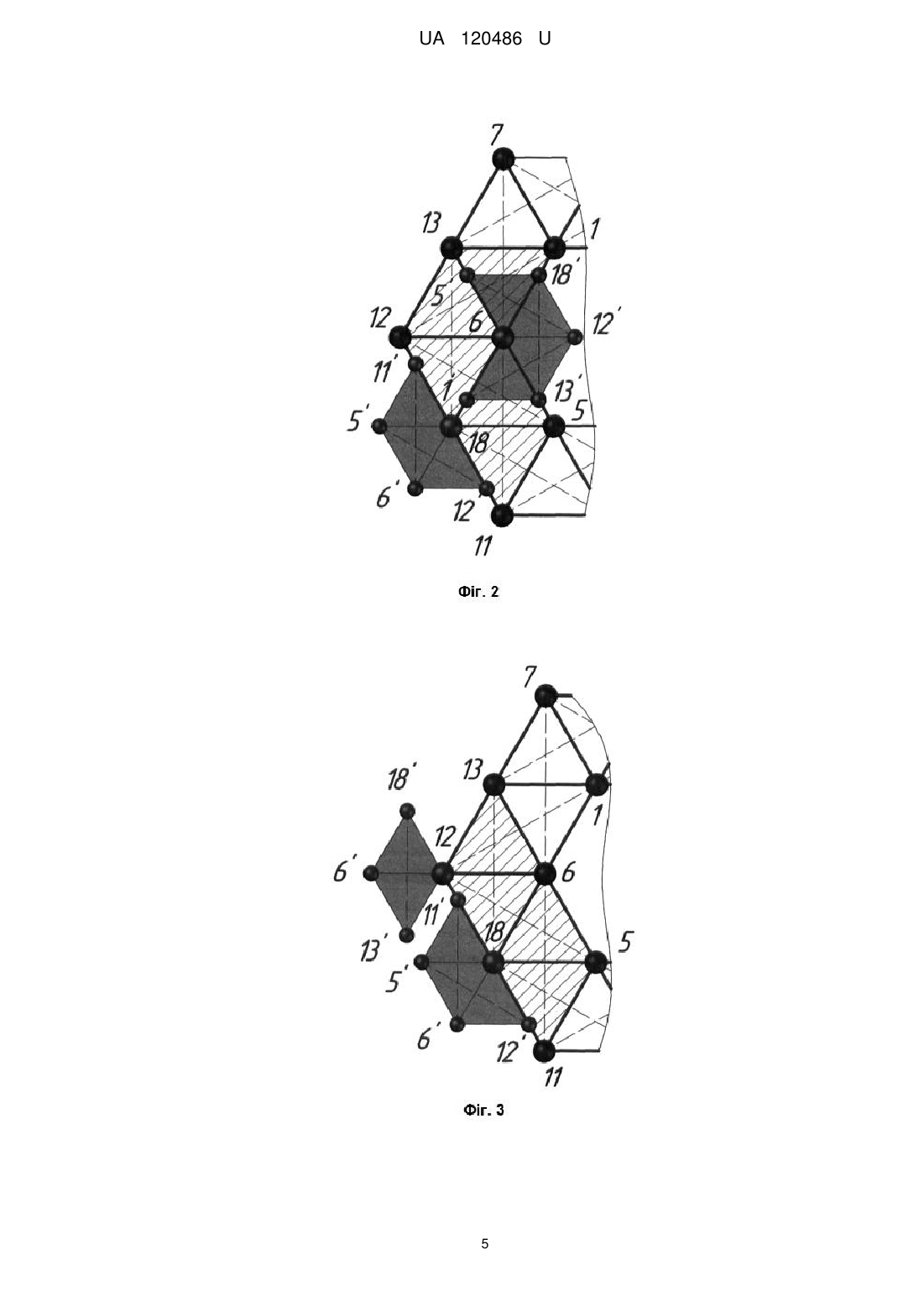
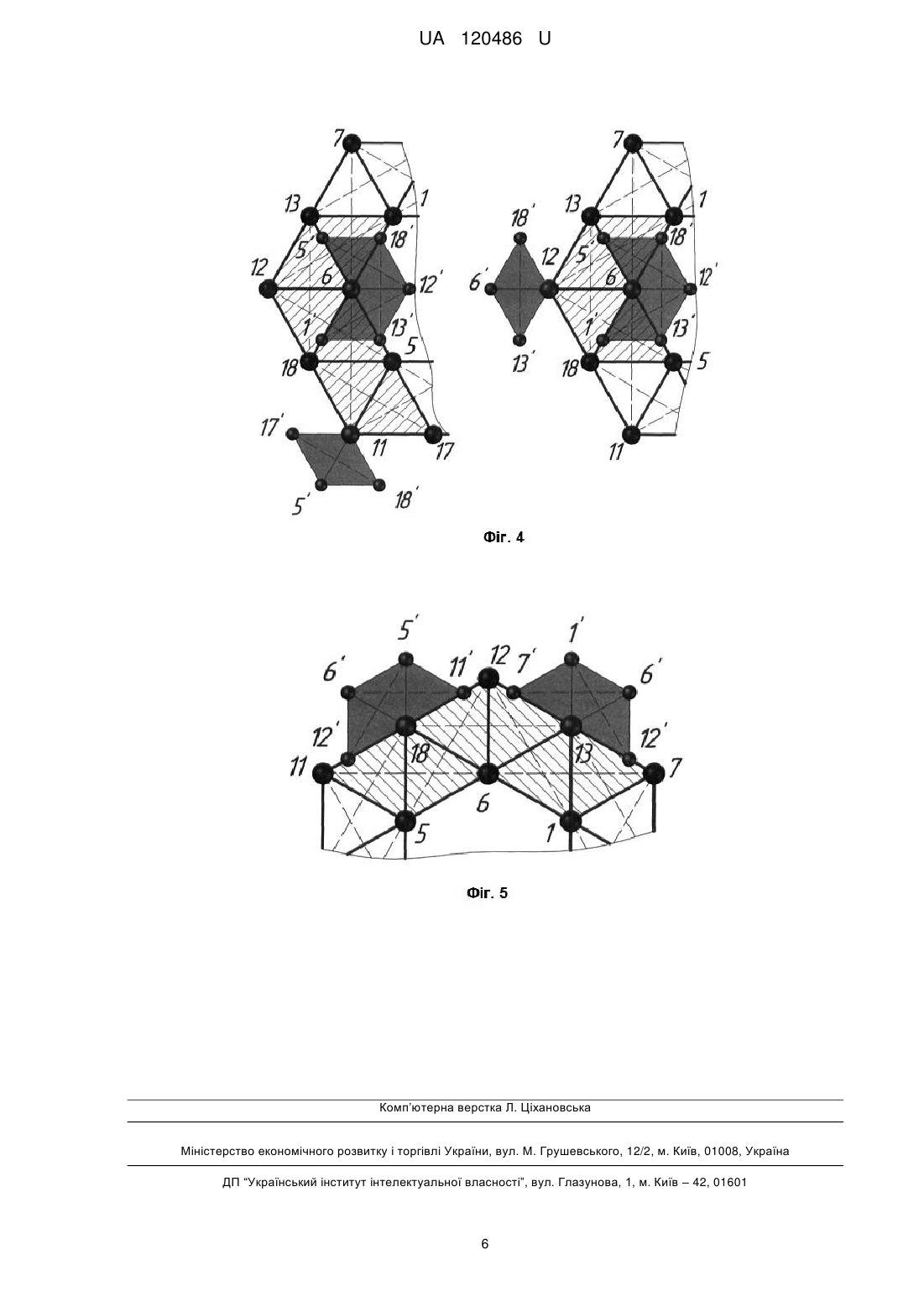
Реферат: Спосіб візуалізації зміни параметрів сигналів інформаційних вузлів в одному кластері полягає у моделюванні бездротової сенсорної мережі шляхом вимірювання відстані між інформаційними вузлами на підставі рівня параметра прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні мережі інформаційних вузлів, обчислюванні віртуальної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли. Кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси, які об'єднані у шестикутні кластери. В результаті зміни параметрів сигналів інформаційних вузлів відповідні функціональні зв'язки змінюють свою довжину, нові положення кінців функціональних зв'язків представляють як фіктивні положення сигнальних точок, які утворюють дані функціональні зв'язки, з'єднують фіктивні сигнальні точки в одну і отримують переміщення сигнальних точок, які представляють інформаційні вузли зі зміненими параметрами сигналів, у третій вимір, що створює візуалізацію тривимірного геометричного об'єкта. UA 120486 U (12) UA 120486 U UA 120486 U 5 10 Корисна модель належить до бездротових сенсорних мереж, зокрема їх комп'ютерної візуалізації, і може бути використана у інформаційних, промислових та спеціалізованих системах, які експлуатують у різних галузях народного господарства. Відомим аналогом є спосіб симплексного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметра прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні мережі інформаційних вузлів, обчислюванні віртуальної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси i j 15 20 25 30 35 40 45 50 які при побудові мають форму ромбів, де C - сигнальна точка, i , j , k , p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін (див. Патент України № 82896, від 27.08.2013 р. МПК H04W12/12(2009.01), бюл. Промислова власність № 16, 2013). Недоліком вказаного способу є складність контролю за бездротовою сенсорною мережею, що налічує велику кількість інформаційних вузлів, і неможливість відслідковування трансформації симплекса, в якому сигнальна точка, яка представляє атакований інформаційний вузол, розміщена на кінці великої діагоналі ромба. Найближчим аналогом до запропонованої корисної моделі є спосіб кластерного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметра прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні мережі інформаційних вузлів, обчислюванні віртуальної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні i 4Ck , які при побудові мають форму ромбів, p трикутники об'єднують у чотириточкові симплекси j де C - сигнальна точка, i , j , k , p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, при цьому кожні вісімнадцять сигнальних точок об'єднують у кластери у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки (див. Патент України № 93269, від 25.09.2014 р. МПК H04W12/12 (2009.01), бюл. Промислова власність № 18, 2014). Недоліком найближчого аналога є складність контролю за частиною бездротової сенсорної мережі, одночасно атаковані інформаційні вузли якої представлені у кластерах сигнальними точками з різною кількістю функціональних зв'язків, і неможливість однозначного визначення області повної трансформації кластера при одночасній зміні параметрів сигналів кількох інформаційних вузлів. В основу корисної моделі поставлено задачу спрощення контролю за частиною бездротової сенсорної мережі, одночасно атаковані інформаційні вузли якої представлені у кластерах сигнальними точками з різною кількістю функціональних зв'язків, і одержання можливості однозначного визначення області повної трансформації кластера при одночасній зміні параметрів сигналів кількох інформаційних вузлів шляхом моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметра прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні мережі інформаційних вузлів, обчислюванні віртуальної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси i j 55 4Ck , p 4Ck , p які при побудові мають форму ромбів, де C - сигнальна точка, i , j , k , p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, при цьому кожні вісімнадцять сигнальних точок об'єднують у кластери у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість сигнальних точок є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по 1 UA 120486 U 5 10 15 20 25 30 35 40 45 50 55 чотири функціональні зв'язки, при цьому в результаті зміни параметрів сигналів інформаційних вузлів відповідні функціональні зв'язки змінюють свою довжину, нові положення кінців функціональних зв'язків представляють як фіктивні положення сигнальних точок, які утворюють дані функціональні зв'язки, з'єднують фіктивні сигнальні точки в одну і отримують переміщення сигнальних точок, які представляють інформаційні вузли зі зміненими параметрами сигналів, у третій вимір, що створює візуалізацію тривимірного геометричного об'єкта. На фіг. 1 показано області повної трансформації за методом фіктивних сигнальних точок, на фіг. 2 показано зміну параметрів сигналів двох інформаційних вузлів, сигнальні точки яких знаходяться у вершині внутрішнього шестикутника і в середині сторони зовнішнього обвідного шестикутника, на фіг. 3 показано зміну параметрів сигналів двох інформаційних вузлів, сигнальні точки яких знаходяться у вершині і середині сторони зовнішнього обвідного шестикутника, на фіг. 4 показано зміну параметрів сигналів двох інформаційних вузлів, сигнальні точки яких знаходяться у вершинах зовнішнього обвідного і внутрішнього шестикутників, на фіг. 5 показано зміну параметрів сигналів двох інформаційних вузлів, сигнальні точки яких знаходяться у серединах двох сусідніх сторін зовнішнього обвідного шестикутника. Спосіб реалізується таким чином. Вимірюють відстані між інформаційними вузлами, використовуючи моделювання похибки вимірювання відстані між інформаційними вузлами змішаними шумами. Реконструюють топологічну поверхню сенсорної мережі за допомогою тріангуляції Делоне і обчислюють віртуальні позиції кожного інформаційного вузла. Аналіз візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла проводять, використовуючи сітку рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли. Кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові i 4Ck , які при побудові мають форму ромбів, де C - сигнальна точка, i , j , k , p p симплекси j номери сигнальних точок, які представляють інформаційні вузли бездротової сенсорної мережі. Кожні 18 сигнальних точок бездротової сенсорної мережі об'єднують у кластери у формі зовнішнього обвідного і внутрішнього шестикутників (див. фіг. 1). При цьому сигнальні точки 1, 2, 3, 4, 5, 6 є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, сигнальні точки 7, 8, 9, 10, 11, 12 є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, сигнальні точки 13, 14, 15, 16, 17, 18 є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. Як основу для відслідковування рівня пошкодження сигналу окремого інформаційного вузла використовують властивість кластера, який здійснює візуалізацію нормальної роботи інформаційних вузлів, в результаті зміни параметрів сигналів змінювати довжини відповідних функціональних зв'язків. В кінці видовженого функціонального зв'язку утворюють нове фіктивне положення сигнальної точки, яка в кластері представляє інформаційний вузол, що межує з інформаційним вузлом, параметри сигналу якого зазнали змін. В результаті сигнальні точки, що знаходяться у вершинах зовнішнього обвідного шестикутника, отримають по три фіктивні сигнальні точки, сигнальні точки, що знаходяться у серединах сторін зовнішнього обвідного шестикутника, отримають по чотири фіктивні сигнальні точки, сигнальні точки, що знаходяться у вершинах внутрішнього шестикутника, отримають по п'ять фіктивних сигнальних точок. З'єднання фіктивних сигнальних точок в одну точку призводить до переміщення сигнальної точки, яка представляє інформаційний вузол зі зміненими параметрами сигналу, у третій вимір, що створює візуалізацію тривимірного геометричного об'єкта. При одночасній зміні параметрів сигналів інформаційних вузлів, представлених у кластері сигнальними точками з різною кількістю функціональних зв'язків, з'єднують фіктивні сигнальні точки між собою і з місцем розміщення сигнальних точок при стабільній роботі інформаційних вузлів, отримують плоскі геометричні об'єкти, які зі симетрією відносно початкових положень відповідних сигнальних точок відображають структуру областей повної трансформації у кластері при одночасній зміні параметрів сигналів інформаційних вузлів (див. фіг. 2, фіг. 3, фіг. 4 і фіг. 5). Приклад конкретної реалізації способу одночасної візуалізації зміни параметрів сигналів інформаційних вузлів в одному кластері. Бездротову сенсорну мережу побудували на інформаційних вузлах, які сформували на модулях ХВее виробництва фірми США Digi International шляхом програмування стеку ХВее на програмному рівні. Інформаційні вузли функціонували в рамках протоколу Zig XBee згідно зі стандартом IEEE 802.15.4. Вбудованою програмою застосували ZB 20, базовану на специфікації Zig Bee PRO Feature Set. Бездротову сенсорну мережу сформували на 18 інформаційних вузлах із інтегрованими антенами та розмістили у просторі на віддалі 1 м між 2 UA 120486 U сусідніми інформаційними вузлами. Вимірювали параметри сигналів інформаційних вузлів і будували віртуальну бездротову сенсорну мережу таким чином, що кожен інформаційний вузол знаходився у вершині рівностороннього трикутника. Кожні два сусідні рівносторонні трикутники 5 10 15 20 25 30 35 40 i 4Ck , які при побудові мають форму ромбів, де C p об'єднали у чотириточкові симплекси, j сигнальна точка, i , j , k , p - номери сигнальних точок, які представляють інформаційні вузли бездротової сенсорної мережі. 18 сигнальних точок об'єднали у кластер (див. фіг. 1) у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що сигнальні точки 1, 2, 3, 4, 5, 6 є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, сигнальні точки 7, 8, 9, 10, 11, 12 є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, сигнальні точки 13, 14, 15, 16, 17, 18 є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки. Бездротову сенсорну мережу вводили в два режими роботи: без приглушення сигналів інформаційних вузлів при температурі довкілля в межах від +5 °C до +30 °C і вологості від 30 % до 70 %. Вимірювали відстані між інформаційними вузлами на підставі рівня потужності прийнятого сигналу. При цьому потужність прийнятого сигналу вимірювали за допомогою програми на підставі 10-бітного аналого-цифрового перетворювача. В подальшому здійснювали реконструювання топологічної поверхні сенсорної мережі, обчислювали віртуальні позиції кожної сигнальної точки у шестикутному кластері з довжиною функціонального зв'язку їм і визначали, що об'єм симплексів рівний нулю. Потім приглушували сигнал інформаційного вузла, який у кластері представляє сигнальна точка 10, і шляхом вимірювання потужності прийнятого сигналу інформаційними вузлами, які у кластері представляють сигнальні точки 4, 16, 17, одержували видовження функціональних 1 1 1 зв'язків l4,10, l16,10, l17,10 до положення фіктивних сигнальних точок 4 , 16 , 17 , яке становило 2,85 1 1 1 1 м. З'єднання фіктивних сигнальних точок 4 , 16 , 17 в одну 10 привело до утворення 3 трансформованого симплекса об'ємом 0,38 м . В подальшому приглушували сигнал інформаційного вузла, який у кластері представляє сигнальна точка 15, і шляхом вимірювання потужності прийнятого сигналу інформаційними вузлами, які у кластері представляють сигнальні точки 2, 3, 8, 9, одержали видовження функціональних зв'язків l 2,15, l3,15, l8,15, l9,15 до 1 1 1 1 положення фіктивних сигнальних точок 2 , 3 , 8 , 9 , яке становило 2,85 м. З'єднання фіктивних 1 1 1 1 1 сигнальних точок 2 , 3 , 8 , 9 в одну 15 привело до утворення трансформованого симплекса 3 об'ємом 0,57 м . В подальшому приглушували сигнал інформаційного вузла, який у кластері представляє сигнальна точка 1, і шляхом вимірювання потужності прийнятого сигналу інформаційними вузлами, які у кластері представляють сигнальні точки 2, 6, 7, 13, 14, одержали видовження функціональних зв'язків l2,1, l6,1, l7,1, l13,1, l14,1 до положення фіктивних сигнальних 1 1 1 1 1 1 1 1 1 точок 2 , 6 , 7 , 13 , 14 , яке становило 2,85. З'єднання фіктивних сигнальних точок 2 , 6 , 7 , 13 , 1 1 3 14 в одну 1 привело до утворення трансформованого симплекса об'ємом 0,76 м . Аналогічних результатів досягли, одночасно приглушуючи сигнали інформаційних вузлів, які у кластері представлені сигнальними точками 6 і 18 (див. фіг. 2), 12 і 18 (див. фіг. 3), 6 і 11 та 6 і 12 (див. фіг. 4), 13 і 18 (див. фіг. 5). Таким чином запропонований спосіб дозволяє спростити контроль за частиною бездротової сенсорної мережі, одночасно атаковані інформаційні вузли якої представлені у кластерах сигнальними точками з різною кількістю функціональних зв'язків, і одержати можливість однозначного визначення області повної трансформації кластера при одночасній зміні параметрів сигналів кількох інформаційних вузлів. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Спосіб візуалізації зміни параметрів сигналів інформаційних вузлів в одному кластері, що полягає у моделюванні бездротової сенсорної мережі шляхом вимірювання відстані між інформаційними вузлами на підставі рівня параметра прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні мережі інформаційних вузлів, обчислюванні віртуальної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij 4Ck , які при побудові мають форму ромбів, p де C - сигнальна точка, i , j , k , p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, при цьому кожні вісімнадцять сигнальних точок об'єднують у кластер у формі зовнішнього обвідного і внутрішнього шестикутників таким чином, що шість 3 UA 120486 U 5 10 сигнальних точок є вершинами внутрішнього шестикутника і мають по п'ять функціональних зв'язків, інші шість сигнальних точок є вершинами зовнішнього обвідного шестикутника і мають по три функціональні зв'язки, останні шість сигнальних точок є серединами сторін зовнішнього обвідного шестикутника і мають по чотири функціональні зв'язки, який відрізняється тим, що в результаті зміни параметрів сигналів інформаційних вузлів відповідні функціональні зв'язки змінюють свою довжину, нові положення кінців функціональних зв'язків представляють як фіктивні положення сигнальних точок, які утворюють дані функціональні зв'язки, з'єднують фіктивні сигнальні точки в одну і отримують переміщення сигнальних точок, які представляють інформаційні вузли зі зміненими параметрами сигналів, у третій вимір, що створює візуалізацію тривимірного геометричного об'єкта. 4 UA 120486 U 5 UA 120486 U Комп’ютерна верстка Л. Ціхановська Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Автори російськоюMikolaj Karpinski syn Piotra, Pawel Filip Falat syn Piotra, Tomasz Gancarczyk syn Jana, Karpinskyi Volodymyr Mykolayovych
МПК / Мітки
МПК: H04W 12/12
Мітки: одному, вузлів, сигналів, зміни, інформаційних, візуалізації, кластері, параметрів, спосіб
Код посилання
<a href="https://ua.patents.su/8-120486-sposib-vizualizaci-zmini-parametriv-signaliv-informacijjnikh-vuzliv-v-odnomu-klasteri.html" target="_blank" rel="follow" title="База патентів України">Спосіб візуалізації зміни параметрів сигналів інформаційних вузлів в одному кластері</a>
Спосіб візуалізації параметрів сигналів інформаційних вузлів
Номер патенту: 103955
Опубліковано: 12.01.2016
Автори: Карпінський Володимир Миколайович, Чиж Віталій Михайлович, Марек Богуслав Александер син Антонєґо, Міколай Карпіньскі син Пйотра, Балабан Степан Миколайович
МПК: H04W 12/12
Мітки: вузлів, параметрів, візуалізації, інформаційних, сигналів, спосіб
Формула / Реферат:
1. Спосіб візуалізації параметрів сигналів інформаційних вузлів, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметру прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного інформаційного вузла, аналізі візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки рівносторонніх...
Спосіб візуалізації параметрів сигналів обмеженої кількості інформаційних вузлів

Номер патенту: 113435
Опубліковано: 25.01.2017
Автори: Карпінський Микола Петрович, Чиж Віталій Михайлович, Балабан Степан Миколайович
МПК: H04W 12/12
Мітки: вузлів, сигналів, інформаційних, спосіб, кількості, візуалізації, обмежено, параметрів
Спосіб кластерного моделювання бездротової сенсорної мережі
Номер патенту: 93269
Опубліковано: 25.09.2014
Автори: Міколай Карпіньскі син Пйотра, Балабан Степан Миколайович, Чиж Віталій Михайлович
МПК: H04W 12/12
Мітки: сенсорної, бездротової, кластерного, мережі, моделювання, спосіб
Формула / Реферат:
Спосіб кластерного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчисленні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні...
Пристрій для подання інформаційних світлових сигналів
Номер патенту: 49564
Опубліковано: 26.04.2010
Автори: Дорощенков Геннадій Дмитрович, Асауленко Сергій Васильович, Дусанюк Сергій Вікторович, Ходяков Євген Олександрович, Кожем'яко Володимир Прокопович
МПК: G08G 1/095
Мітки: пристрій, світлових, подання, сигналів, інформаційних
Формула / Реферат:
Пристрій для подання інформаційних світлових сигналів, який містить блок відображення, виводи якого підключені до виводів блока ключів, входи яких підключені до виходів блока елементів І, перші входи якого підключені до виходів шифратора, входи якого підключені до виходів дешифратора, входи якого підключені до виходів лічильника, який відрізняється тим, що в нього введено блок формування сигналу часу світіння, вихід якого підключений до...
Пристрій для подавлення засобів передачі, реєстрації та приймання інформаційних сигналів
Номер патенту: 91098
Опубліковано: 25.06.2010
Автори: Чирков Дмитро Володимирович, Петров Олександр Степанович, Хорошко Володимир Олексійович, Петров Антон Олександрович
МПК: H04K 3/00
Мітки: передачі, подавлення, пристрій, сигналів, засобів, приймання, реєстрації, інформаційних
Формула / Реферат:
Пристрій для подавлення засобів передачі, реєстрації та приймання інформаційних сигналів, що містить генератор коливань, що модулюються, який складається із трьох генераторів шумоподібних сигналів з різними смугами граничних частот, перший та другий підсилювачі потужності, генератор низькочастотного шумоподібного сигналу, суматор, модулятор, випромінювач, джерело електроживлення, приймач інформаційних сигналів, оброблювач спектра, який...