Спосіб візуалізації параметрів сигналів інформаційних вузлів
Номер патенту: 103955
Опубліковано: 12.01.2016
Автори: Міколай Карпіньскі син Пйотра, Балабан Степан Миколайович, Марек Богуслав Александер син Антонєґо, Карпінський Володимир Миколайович, Чиж Віталій Михайлович
Формула / Реферат
1. Спосіб візуалізації параметрів сигналів інформаційних вузлів, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметру прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного інформаційного вузла, аналізі візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ![]() , які при побудові мають форму ромбів, де С - сигнальна точка, i, j, k, p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, який відрізняється тим, що первинне положення сигнальних точок фіксують у симплексі
, які при побудові мають форму ромбів, де С - сигнальна точка, i, j, k, p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, який відрізняється тим, що первинне положення сигнальних точок фіксують у симплексі ![]() і характеризують фізичними зв'язками між сусідніми сигнальними точками
і характеризують фізичними зв'язками між сусідніми сигнальними точками ![]() , при зміні параметру сигналу інформаційного вузла і змінюють довжину відповідних фізичних зв'язків, в результаті фізичні зв'язки
, при зміні параметру сигналу інформаційного вузла і змінюють довжину відповідних фізичних зв'язків, в результаті фізичні зв'язки ![]() стають дугами
стають дугами ![]() , які відділяють від кіл хордами, рівними фізичним зв'язкам
, які відділяють від кіл хордами, рівними фізичним зв'язкам ![]() , максимальну відстань між дугою
, максимальну відстань між дугою ![]() . і хордою, рівною фізичному зв'язку
. і хордою, рівною фізичному зв'язку ![]() , називають показником трансформації h і визначають за формулою:
, називають показником трансформації h і визначають за формулою:
![]() .
.
2. Спосіб візуалізації параметрів сигналів інформаційних вузлів за п. 1, який відрізняється тим, що встановлюють на основі фізичних характеристик інформаційних вузлів та умов експлуатації безпроводової сенсорної мережі максимальне значення показника трансформації hmax, при досягненні якого експлуатацію інформаційного вузла вважають недоцільною, відслідковують зміну показника трансформації h і при досягненні співвідношення h ³ hmax приймають рішення про доцільність експлуатації інформаційного вузла.
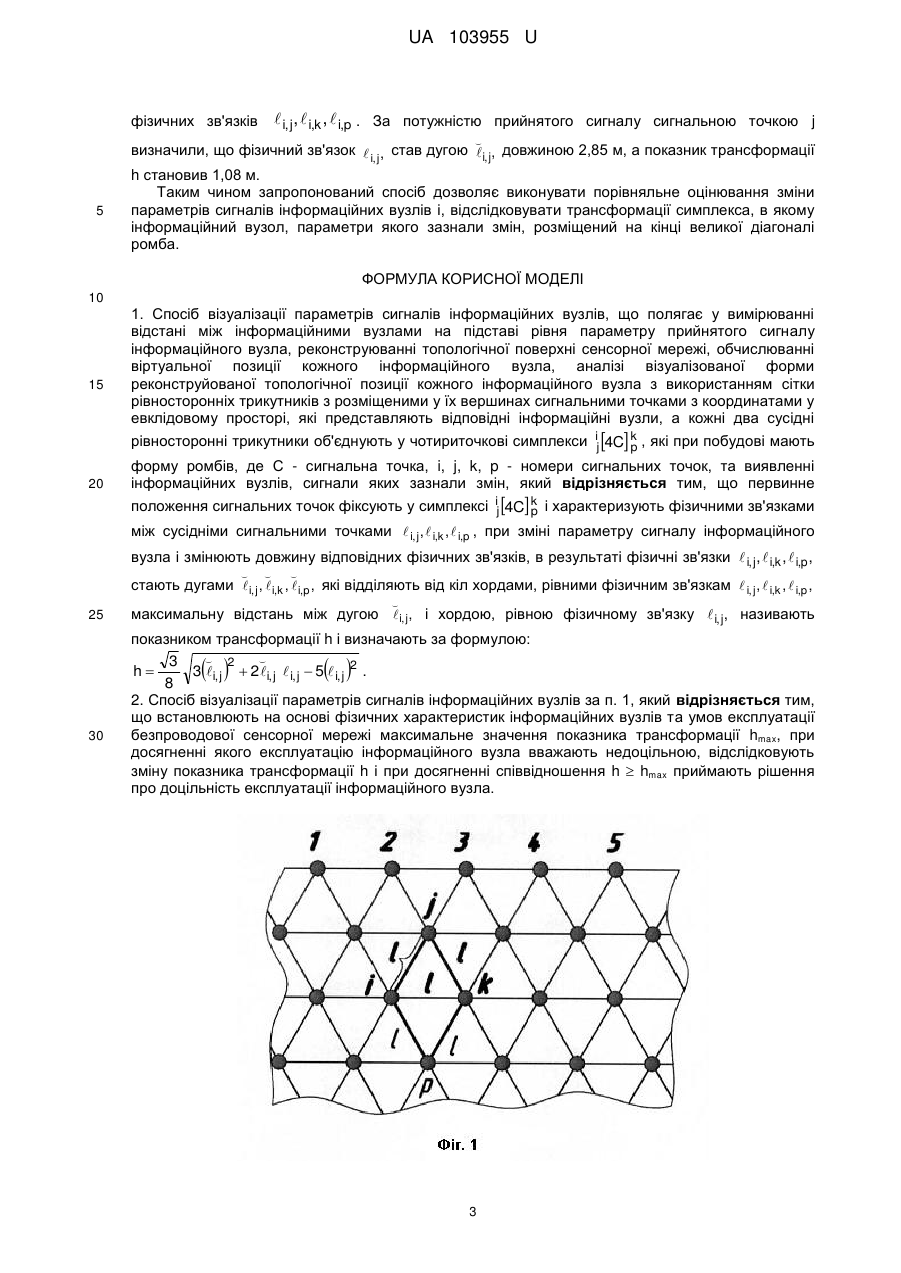
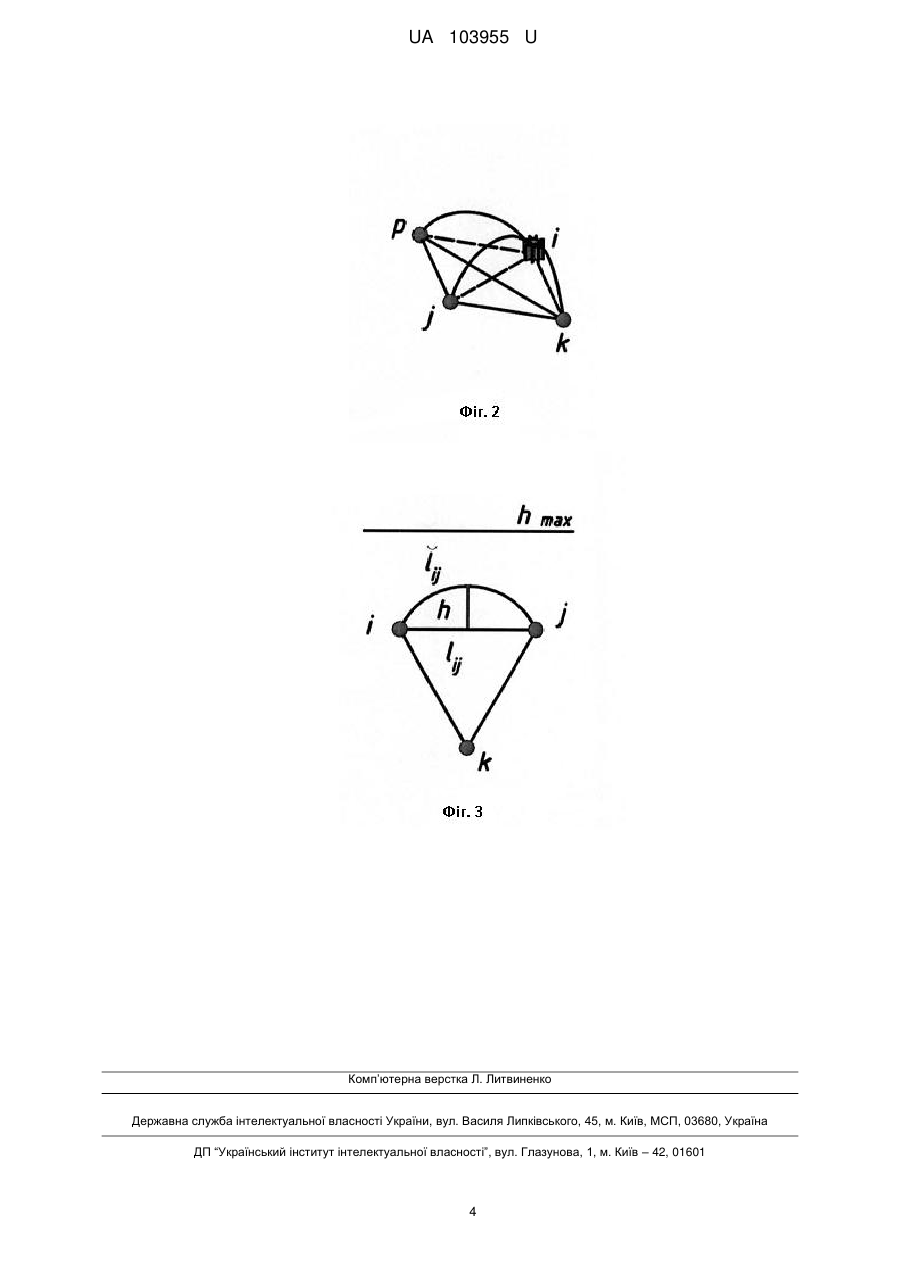
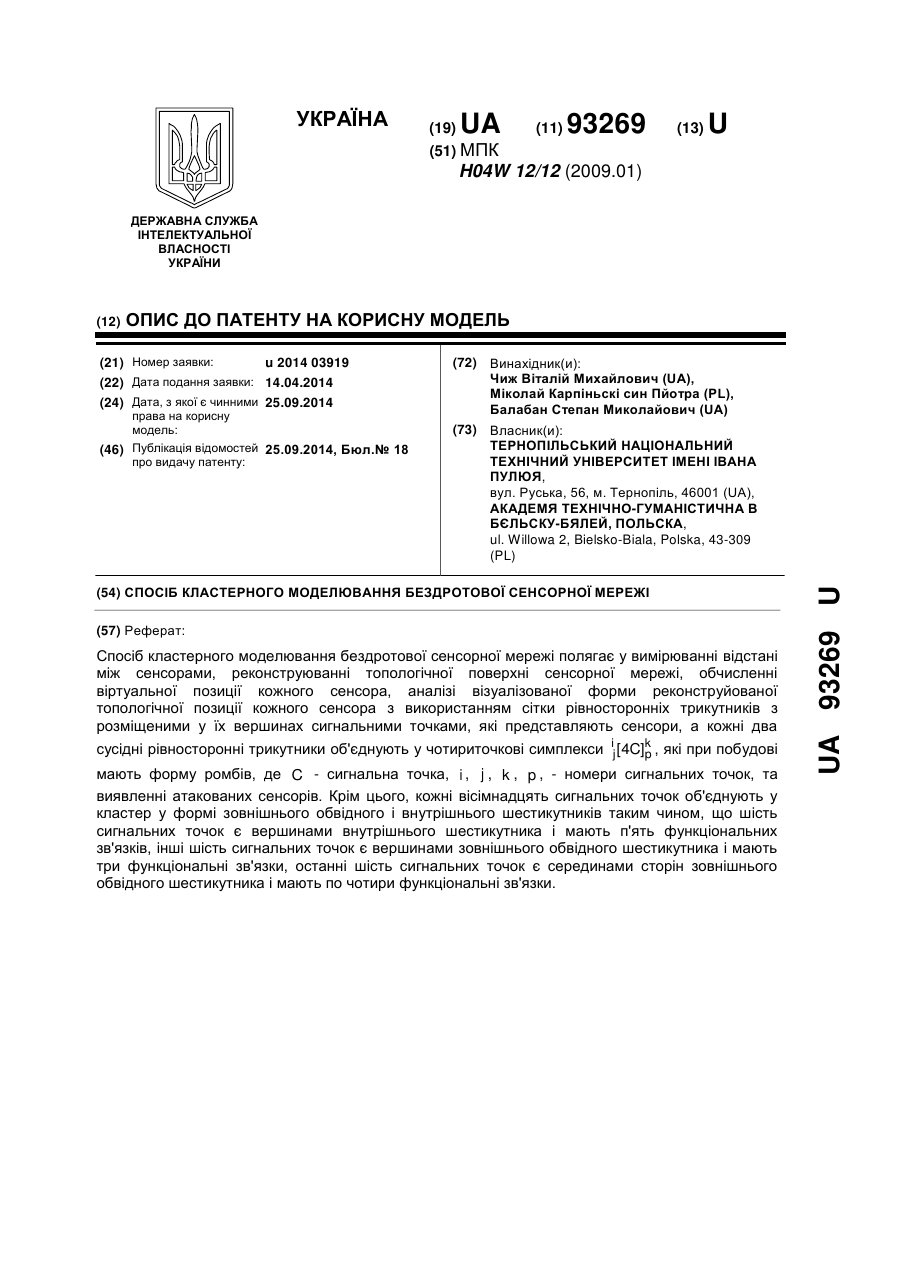
Текст
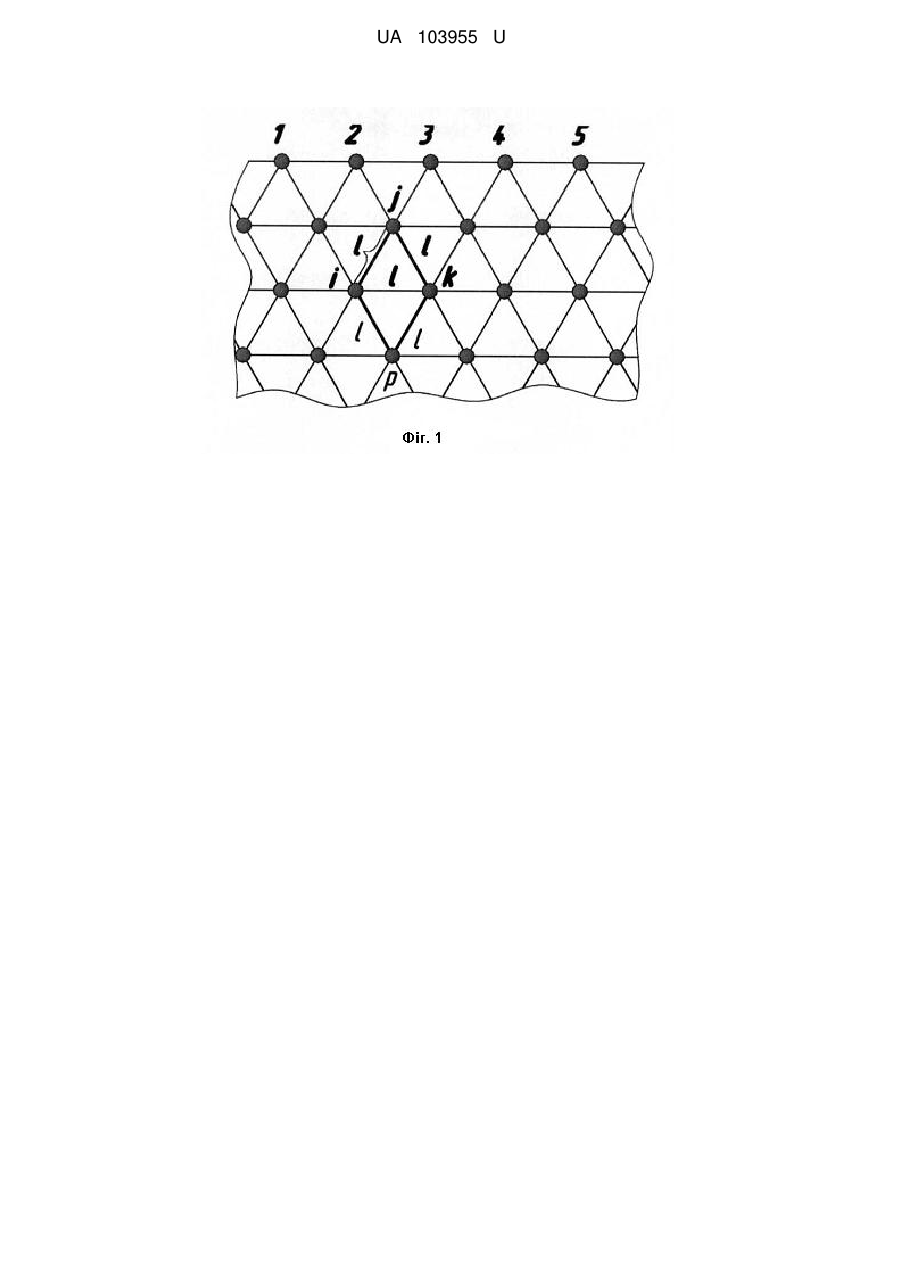
Реферат: Спосіб візуалізації параметрів сигналів інформаційних вузлів полягає у вимірюванні відстані між інформаційними вузлами, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного інформаційного вузла, створенні віртуальної мережі з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють відповідні інформаційні вузли. Кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси, які при побудові мають форму ромбів. Первинне положення сигнальних точок фіксують у симплексі і характеризують фізичними зв'язками між сусідніми сигнальними точками i, j, i,k , i,p . При зміні параметру сигналу інформаційного вузла відповідний фізичний зв'язок стає дугою, яку відділяють від кола хордою, рівною фізичному зв'язку. Максимальну відстань між дугою і хордою, рівною фізичному зв'язку, називають показником трансформації, зміну якого відслідковують і приймають рішення про доцільність експлуатації інформаційного вузла. UA 103955 U (12) UA 103955 U UA 103955 U 5 10 15 20 Корисна модель належить до безпроводових сенсорних мереж, зокрема їх комп'ютерної візуалізації, і може бути використана у інформаційних, промислових та спеціалізованих системах, які експлуатують у різних галузях народного господарства. Відомий спосіб візуалізації атаки червоточини у безпроводовій сенсорній мережі, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметру прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного інформаційного вузла, аналізі візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли та виявленні інформаційних вузлів, сигнали яких зазнали змін (див. Патент України № 47011, МПК H04W12/12, бюл. Промислова власність № 21, 2011). Недоліком вказаного способу візуалізації атаки червоточин у безпроводовій сенсорній мережі є неможливість відстежити рівень зміни сили сигналу окремого інформаційного вузла або невеликої групи компактно розташованих інформаційних вузлів, неможливість візуалізації зміни параметрів сигналів інформаційних вузлів, не пов'язаних зі зміною сили сигналів. Найближчим до запропонованої корисної моделі служить спосіб симплексного моделювання безпроводової сенсорної мережі, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметру прийнятого сигналу інформаційного вузла, аналізі візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси i j 25 30 35 40 4C k , p які при побудові мають форму ромбів, де С - сигнальна точка, i, j, k, p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін (див. Патент України № 82896, від МПК H04W12/12, бюл. Промислова власність № 16, 2013). Недоліками найближчого аналога є неможливість використовувати порівняльне оцінювання зміни параметрів сигналів інформаційних вузлів і неможливість відслідкування трансформації симплекса, в якому інформаційний вузол, параметри сигналу якого зазнали змін, розміщений на кінці великої діагоналі ромба. В основу корисної моделі поставлена задача одержання можливості використовувати порівняльне оцінювання зміни параметрів сигналів інформаційних вузлів і відслідковувати трансформації симплекса, в якому інформаційний вузол, параметри якого зазнали змін, розміщений на кінці великої діагоналі ромба, шляхом моделювання безпроводової сенсорної мережі, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметру прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного інформаційного вузла, аналізі візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси i j 4C k , p які при побудові мають форму ромбів, де С - сигнальна точка, i, j, k, p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, причому 45 50 первинне положення сигнальних точок фіксують у симплексі ij 4C k і характеризують фізичними p зв'язками між сусідніми сигнальними точками i, j , i,k , i,p , при зміні параметру сигналу інформаційного вузла і змінюють довжину відповідних фізичних зв'язків i, j , i,k , i,p , в результаті фізичні зв'язки i, j , i,k , i,p , стають дугами i, j , i,k , i,p , які відділяють від кіл хордами, рівними фізичним зв'язкам i, j , i,k , i,p , максимальну відстань між дугою i, j, і хордою i, j, називають показником трансформації h і визначають за формулою: 2 3 h 3 i, j 2 i, j i, j 5 i, j 2 , 8 встановлюють на основі фізичних характеристик інформаційних вузлів та умов експлуатації безпроводової сенсорної мережі максимальне значення показника трансформації hmax, при досягненні якого експлуатацію інформаційного вузла вважають недоцільною, відслідковують 1 UA 103955 U 5 10 15 зміну показника трансформації h і при досягненні співвідношення h hmax приймають рішення про доцільність експлуатації інформаційного вузла. На фіг. 1 показано схему реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, на фіг. 2 показано схему області повної трансформації симплекса ij 4C k , p на фіг. 3 показано схему візуалізації зміни параметрів сигналів інформаційних вузлів. Спосіб реалізується таким чином. Вимірюють відстані між інформаційними вузлами з використанням моделювання похибки вимірювання відстані між інформаційними вузлами змішаними шумами. Реконструюють топологічну поверхню сенсорної мережі за допомогою тріангуляції Делоне і обчислюють віртуальні позиції кожного інформаційного вузла. Аналізують візуалізовану форму реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли. Позиціями на фіг. 1 позначені: 1,2,3,4, … i, j, k, p … - номери сигнальних точок, які представляють відповідні інформаційні вузли безпроводової сенсорної мережі. Кожні два сусідні 20 рівносторонні трикутники об'єднують у чотириточкові симплекси ij 4C k , які при побудові мають p форму ромбів, де С - сигнальна точка, i, j, k, p - номери сигнальних точок, які представляють інформаційні вузли безпроводової сенсорної мережі. Для візуалізації рівня зміни параметрів сигналів інформаційних вузлів первинне положення 25 хордами, рівними фізичним зв'язкам i, j , i,k , i,p , (див. фіг. 2). Максимальну відстань між дугою i, j , і хордою, рівною фізичному зв'язку i, j, називаємо показником трансформації h і сигнальних точок фіксують у симплексі ij 4C k і характеризують фізичними зв'язками i, j, i,k , i,p . p При зміні параметру сигналу інформаційного вузла і змінюють довжини відповідних фізичних зв'язків. В результаті фізичні зв'язки i, j , i,k , i,p , стають дугами i, j , i,k , i,p , які відділяють від кіл визначають за формулою: 2 3 h 3 i, j 2 i, j i, j 5 i, j 2 . 8 На основі фізичних характеристик інформаційних вузлів та умов експлуатації безпроводової сенсорної мережі встановлюють максимальне значення показника трансформації hmax, при досягненні якого експлуатацію вузла і вважають недоцільною. Відслідковують зміну показника трансформації h і при досягненні співвідношення hhmax приймають рішення про доцільність експлуатації інформаційного вузла і. Приклад конкретної реалізації способу візуалізації параметрів сигналів інформаційних вузлів. Безпроводову сенсорну мережу побудували на інформаційних вузлах, які сформували на модулях ХВее виробництва фірми Digi International шляхом програмування стеку ХВее на програмному рівні. Інформаційні вузли функціонували в рамках протоколу Zig ХВее згідно зі стандартом IEEE 802.15.4. Безпроводову сенсорну мережу сформували на 198 інформаційних вузлах з інтегрованими антенами та розмістили у просторі на віддалі 1 м між сусідніми інформаційними вузлами таким чином, що кожен інформаційний вузол знаходився у вершині рівностороннього трикутника. Кожні два сусідні рівносторонні трикутники об'єднали учотириточкові симплекси ij 4C k , які при побудові мають форму ромбів, де С - сигнальна точка, p 30 35 40 45 50 i, j, k, p - номери сигнальних точок. Безпроводову сенсорну мережу вводили у два режими роботи: без приглушення сигналів окремих інформаційних вузлів при температури довкілля +5 °С до +30 °С і вологості від 30 % до 70 %. Вимірювали відстані між інформаційними вузлами на підставі рівня потужності прийнятого сигналу. При цьому потужність прийнятого сигналу вимірювали за допомогою програми на підставі 10 бітного аналогово-цифрового перетворювача. В подальшому здійснювали реконструювання топологічної поверхні сенсорної мережі, обчислювали віртуальні позиції кожної сигнальної точки, використовуючи сітку чотириточкових симплексів ij 4C k з довжиною фізичних зв'язків 1 м. p Приглушивши сигнал сигнальної точки i, шляхом вимірювання потужності прийнятого сигналу сигнальними точками j, k, р визначили зміну довжини фізичних зв'язків i, j, i,k , i,p . Так за потужністю прийнятого сигналу сигнальними точками j, k, p визначили зміну довжини 2 UA 103955 U фізичних зв'язків 5 i, j, i,k , i,p . За потужністю прийнятого сигналу сигнальною точкою j визначили, що фізичний зв'язок i, j, став дугою i, j, довжиною 2,85 м, а показник трансформації h становив 1,08 м. Таким чином запропонований спосіб дозволяє виконувати порівняльне оцінювання зміни параметрів сигналів інформаційних вузлів і, відслідковувати трансформації симплекса, в якому інформаційний вузол, параметри якого зазнали змін, розміщений на кінці великої діагоналі ромба. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 1. Спосіб візуалізації параметрів сигналів інформаційних вузлів, що полягає у вимірюванні відстані між інформаційними вузлами на підставі рівня параметру прийнятого сигналу інформаційного вузла, реконструюванні топологічної поверхні сенсорної мережі, обчислюванні віртуальної позиції кожного інформаційного вузла, аналізі візуалізованої форми реконструйованої топологічної позиції кожного інформаційного вузла з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками з координатами у евклідовому просторі, які представляють відповідні інформаційні вузли, а кожні два сусідні рівносторонні трикутники об'єднують у чотириточкові симплекси ij 4C k , які при побудові мають p форму ромбів, де С - сигнальна точка, i, j, k, p - номери сигнальних точок, та виявленні інформаційних вузлів, сигнали яких зазнали змін, який відрізняється тим, що первинне положення сигнальних точок фіксують у симплексі ij 4C k і характеризують фізичними зв'язками p між сусідніми сигнальними точками i, j, i,k , i,p , при зміні параметру сигналу інформаційного 25 вузла і змінюють довжину відповідних фізичних зв'язків, в результаті фізичні зв'язки i, j , i,k , i,p , стають дугами i, j , i,k , i,p , які відділяють від кіл хордами, рівними фізичним зв'язкам i, j , i,k , i,p , максимальну відстань між дугою i, j, і хордою, рівною фізичному зв'язку i, j, називають показником трансформації h і визначають за формулою: 2 3 h 3 i, j 2 i, j i, j 5 i, j 2 . 8 2. Спосіб візуалізації параметрів сигналів інформаційних вузлів за п. 1, який відрізняється тим, що встановлюють на основі фізичних характеристик інформаційних вузлів та умов експлуатації безпроводової сенсорної мережі максимальне значення показника трансформації hmax, при досягненні якого експлуатацію інформаційного вузла вважають недоцільною, відслідковують зміну показника трансформації h і при досягненні співвідношення h hmax приймають рішення про доцільність експлуатації інформаційного вузла. 30 3 UA 103955 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюMarek Boguslaw Aleksander syn Antoniego, Karpinskyi Volodymyr Mykolayovych, Mikolaj Karpinski syn Piotra
Автори російськоюКарпинский Владимир Николаевич, Миколай Карпиньски сын Пйотра
МПК / Мітки
МПК: H04W 12/12
Мітки: візуалізації, параметрів, вузлів, інформаційних, спосіб, сигналів
Код посилання
<a href="https://ua.patents.su/6-103955-sposib-vizualizaci-parametriv-signaliv-informacijjnikh-vuzliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб візуалізації параметрів сигналів інформаційних вузлів</a>
Спосіб кластерного моделювання бездротової сенсорної мережі
Номер патенту: 93269
Опубліковано: 25.09.2014
Автори: Балабан Степан Миколайович, Чиж Віталій Михайлович, Міколай Карпіньскі син Пйотра
МПК: H04W 12/12
Мітки: мережі, спосіб, сенсорної, кластерного, бездротової, моделювання
Формула / Реферат:
Спосіб кластерного моделювання бездротової сенсорної мережі, що полягає у вимірюванні відстані між сенсорами, реконструюванні топологічної поверхні сенсорної мережі, обчисленні віртуальної позиції кожного сенсора, аналізі візуалізованої форми реконструйованої топологічної позиції кожного сенсора з використанням сітки рівносторонніх трикутників з розміщеними у їх вершинах сигнальними точками, які представляють сенсори, а кожні два сусідні...
Пристрій для подавлення засобів передачі, реєстрації та приймання інформаційних сигналів
Номер патенту: 91098
Опубліковано: 25.06.2010
Автори: Петров Олександр Степанович, Чирков Дмитро Володимирович, Петров Антон Олександрович, Хорошко Володимир Олексійович
МПК: H04K 3/00
Мітки: сигналів, подавлення, інформаційних, передачі, пристрій, засобів, приймання, реєстрації
Формула / Реферат:
Пристрій для подавлення засобів передачі, реєстрації та приймання інформаційних сигналів, що містить генератор коливань, що модулюються, який складається із трьох генераторів шумоподібних сигналів з різними смугами граничних частот, перший та другий підсилювачі потужності, генератор низькочастотного шумоподібного сигналу, суматор, модулятор, випромінювач, джерело електроживлення, приймач інформаційних сигналів, оброблювач спектра, який...
Спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі

Номер патенту: 64391
Опубліковано: 10.11.2011
Автори: Карпінський Микола Петрович, Карпінський Володимир Миколайович, Євтух Петро Сильвестрович, Боровік Богдан Леонович
МПК: H04W 12/00
Мітки: сенсорний, безпровідній, мережі, візуалізації, червоточини, спосіб, атаки
Формула / Реферат:
Спосіб візуалізації атаки червоточини в безпровідній сенсорній мережі, що полягає у вимірюванні відстані між сенсорами на підставі рівня потужності прийнятого сигналу, реконструюванні топологічної поверхні сенсорної мережі шляхом багатовимірного шкалювання, обчисленні віртуальної позиції кожного сенсора, згладжуванні реконструйованої топологічної поверхні сенсорної мережі, аналізі візуалізованої форми згладженої реконструйованої топологічної...
Пристрій для подання інформаційних світлових сигналів
Номер патенту: 49564
Опубліковано: 26.04.2010
Автори: Асауленко Сергій Васильович, Дусанюк Сергій Вікторович, Ходяков Євген Олександрович, Дорощенков Геннадій Дмитрович, Кожем'яко Володимир Прокопович
МПК: G08G 1/095
Мітки: інформаційних, світлових, подання, сигналів, пристрій
Формула / Реферат:
Пристрій для подання інформаційних світлових сигналів, який містить блок відображення, виводи якого підключені до виводів блока ключів, входи яких підключені до виходів блока елементів І, перші входи якого підключені до виходів шифратора, входи якого підключені до виходів дешифратора, входи якого підключені до виходів лічильника, який відрізняється тим, що в нього введено блок формування сигналу часу світіння, вихід якого підключений до...
Спосіб діагностики стану пухлин голови та шиї шляхом візуалізації лімфатичних вузлів
Номер патенту: 20554
Опубліковано: 15.01.2007
Автори: Мірошниченко Андрій Юрійович, Тимчук Сергій Миколайович, Чередниченко Юрій Віталійович, Ковтуненко Олександр Васильович, Березнюк Володимир Васильович
МПК: A61B 8/12, A61B 8/13, A61B 8/08
Мітки: голови, діагностики, вузлів, пухлин, стану, ши, лімфатичних, візуалізації, спосіб, шляхом
Формула / Реферат:
Спосіб діагностики стану пухлин голови та шиї шляхом візуалізації лімфатичних вузлів, що включає крізьшкірне наповнення лімфатичних вузлів контрастною речовиною, здійснення непрямої лімфо- та комп'ютерної томографії, моніторинг за циркуляцією контрастної речовини, отримання ангіографічного зображення, його оцінку та діагностування, який відрізняється тим, що додатково ангіографічне зображення лімфатичних вузлів, насичених контрастною...
Попередній патент: Горілка “інверарі платинум” (“inverarаy platinum”)
Наступний патент: Формувач періодичної послідовності триімпульсних кодових серій з заданою кількістю імпульсів, програмованою тривалістю паузи між імпульсами у серії і між серіями
Випадковий патент: Склад високотемпературних теплоізоляційних виробів