Спосіб синтезу структури автоматизованої системи контролю та діагностики
Номер патенту: 121372
Опубліковано: 11.12.2017
Автори: Прібилєв Юрій Борисович, Шишацький Андрій Володимирович

Формула / Реферат
Спосіб синтезу структури автоматизованої системи контролю та діагностики (АСКД), в якому АСКД для синтезу структури та перерозподілу інформаційних потоків по мінімально допустимій пропускній спроможності між субблоками використовує традиційний підхід типу "знизу-вгору", при якому спочатку АСКД створює з окремих субблоків вузькоспеціалізований діагностичний модуль для діагностування конкретного параметру (групи параметрів) об'єкта контролю, щонайменше однієї характеристики або набір таких модулів (блоків), який відрізняється тим, що АСКД визначають на об'єкті контролю вид і кількість параметрів, що підлягають діагностуванню, після чого здійснюють побудову структури АСКД та проводять розподіл інформаційних потоків між окремими субблоками на основі графо-директивного способу.
Текст
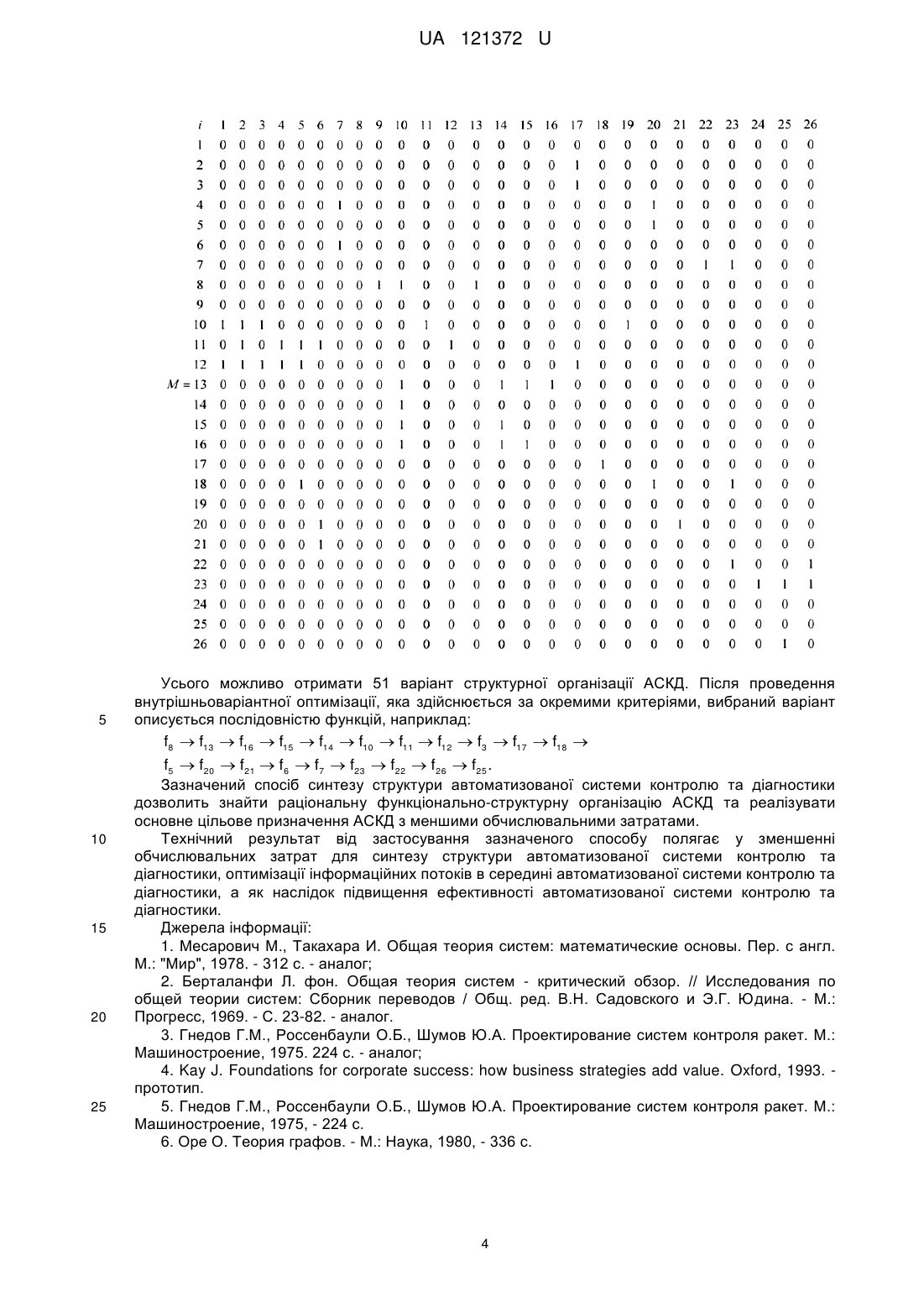
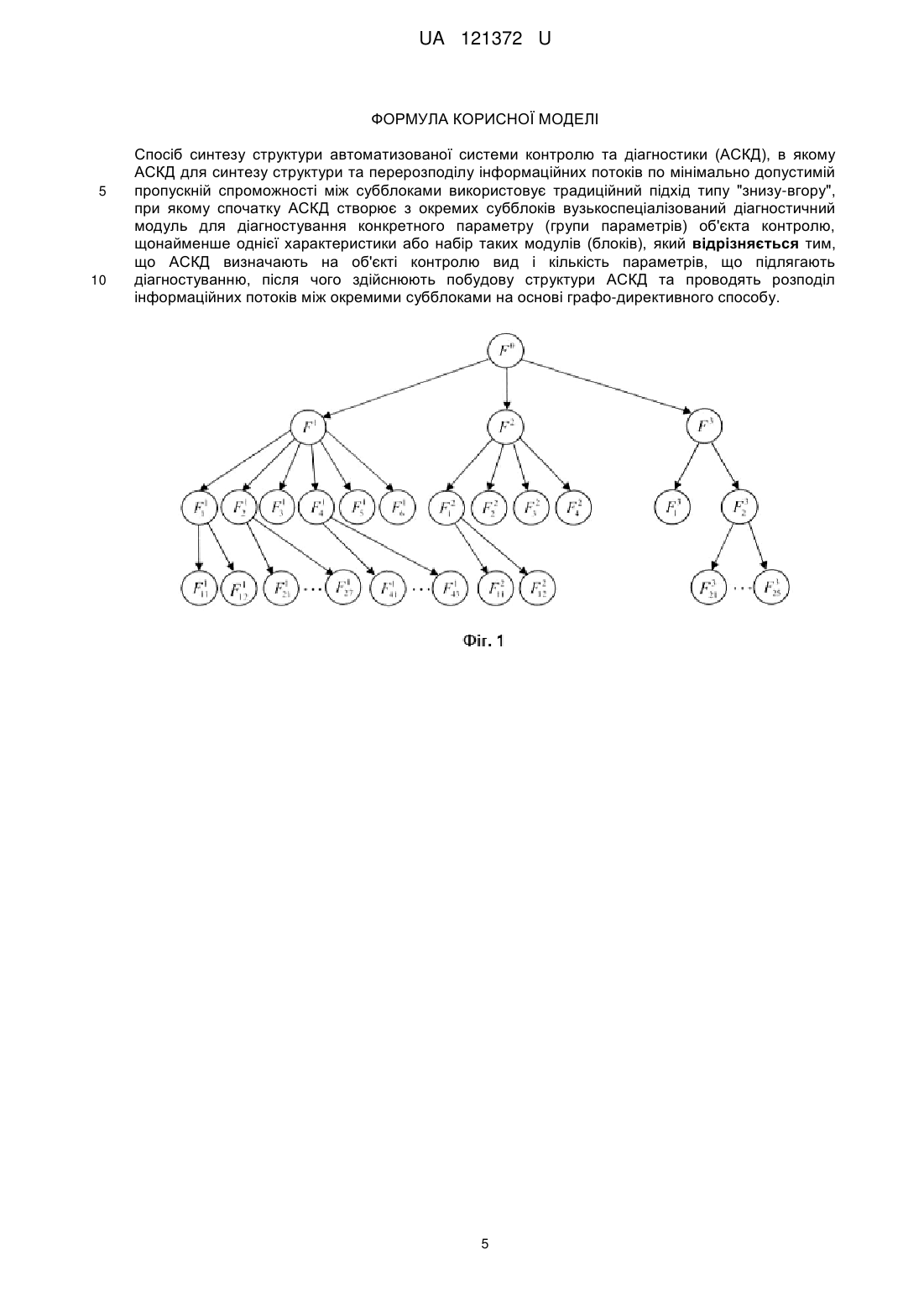
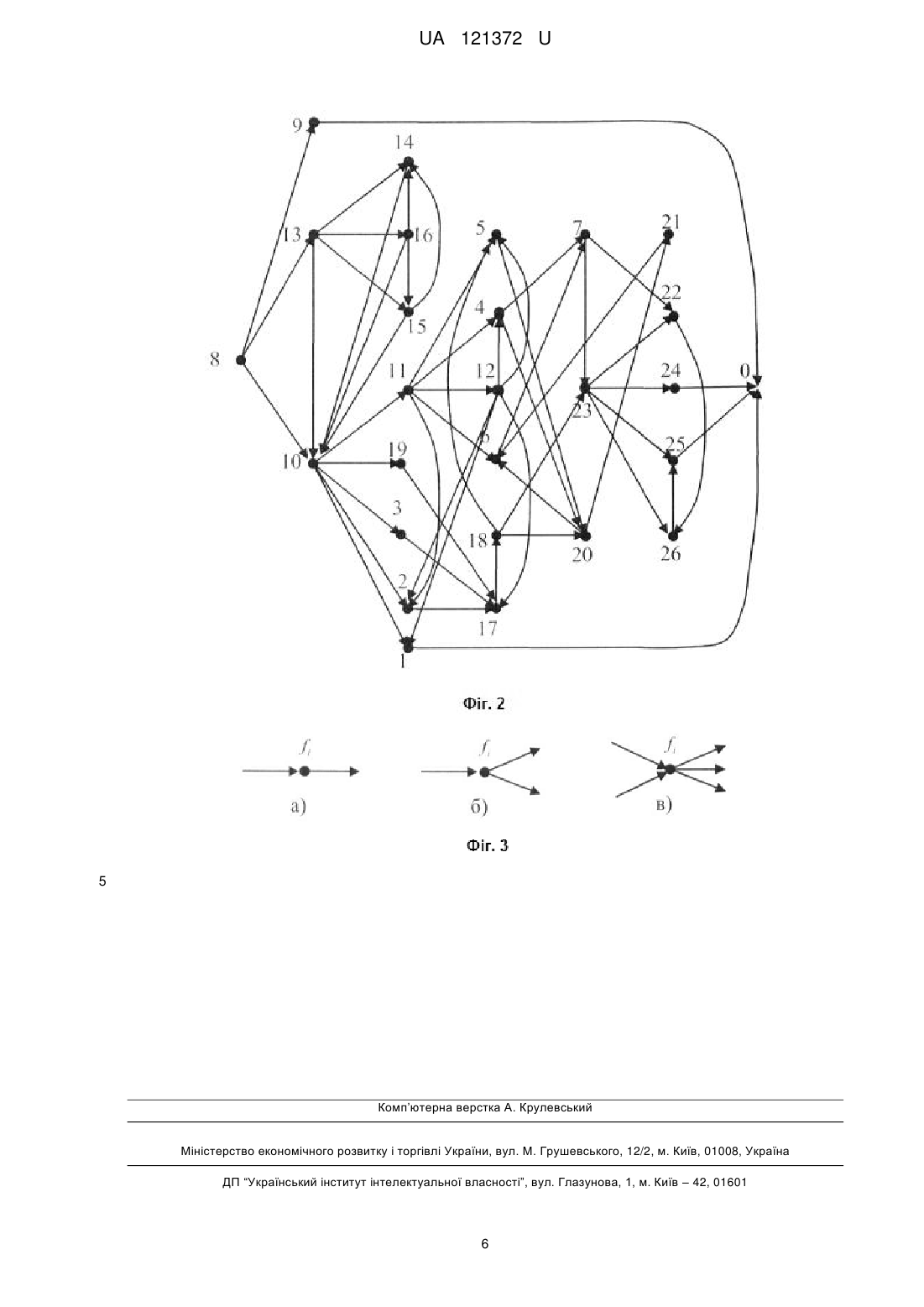
Реферат: Спосіб синтезу структури автоматизованої системи контролю та діагностики, в якому АСКД для синтезу структури та перерозподілу інформаційних потоків по мінімально допустимій пропускній спроможності між субблоками використовує традиційний підхід типу "знизу-вгору", при якому спочатку АСКД створює з окремих субблоків вузькоспеціалізований діагностичний модуль для діагностування конкретного параметру (групи параметрів) об'єкта контролю, щонайменше однієї характеристики або набір таких модулів (блоків). АСКД визначають на об'єкті контролю вид і кількість параметрів, що підлягають діагностуванню, після чого здійснюють побудову структури АСКД та проводять розподіл інформаційних потоків між окремими субблоками на основі графо-директивного способу. UA 121372 U (54) СПОСІБ СИНТЕЗУ СТРУКТУРИ АВТОМАТИЗОВАНОЇ СИСТЕМИ КОНТРОЛЮ ТА ДІАГНОСТИКИ UA 121372 U UA 121372 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі автоматизованих систем спеціального призначення і може бути використана в перспективних автоматизованих системах контролю та діагностики. Існують два варіанти розвитку та вдосконалення озброєння та військової техніки (ОВТ): модернізація існуючих зразків ОВТ або розробка принципово нових. Практика свідчить, що кардинально кращі результати можна отримати лише при розробці ОВТ з використанням нових підходів до вирішення поставлених завдань. Нажаль, використання нових підходів пов'язане з труднощами ідеологічного, економічного та організаційного характеру. Як аналоги вибрані відомі способи синтезу структури автоматизованих систем контролю та діагностики (АСКД) [1-3], суть яких полягає у використанні традиційного підходу типу "знизу вгору", при яких спочатку створюється вузькоспеціалізований діагностичний модуль для діагностування конкретного параметру (групи параметрів) об'єкта контролю (ОК), з деякими характеристиками або набір таких модулів (блоків), а далі, комбінуючи цими модулями контролю, вирішується надзвичайно складне технічне завдання "зведення кінців з кінцями" (узагальнення різнотипної інформації) та побудова комплексної АСКД, для обслуговування конкретного складного зразка ОВТ. Недоліками зазначених способів синтезу структури АСКД є висока обчислювальна складність та недосконалість функціонально-структурної організації АСКД, що призводить до неефективного використання наявних системних ресурсів в процесі експлуатації і потребує створення додаткових підсистем для реалізації головного завдання АСКД і організації взаємодії між ОК та АСКД. Як прототип, для створення удосконаленого способу синтезу структури автоматизованої системи контролю та діагностики, вибрано директивний підхід, суть якого полягає у регламентації функцій, прав та обов'язків між елементами системи управління, шляхом видачі наказів, завдань і розподілу необхідних для їх реалізації ресурсів, серед компонентами автоматизованої системи контролю та діагностики. Проте зазначений підхід має недоліки, суть яких полягає у наявності суперечностей між окремими елементами мережі, що виникають тому, що команди, які надходять від старшого елемента системи, суперечать алгоритму дій підлеглих елементів автоматизованої системи контролю та діагностики [4]. Тому для рішення зазначеного протиріччя доцільно розробити удосконалений спосіб синтезу структури автоматизованої системи контролю та діагностики, що дозволить об'єднати переваги прототипу та аналогів, без їх недоліків. Задачею корисної моделі є зменшення обчислювальних затрат для синтезу структури автоматизованої системи контролю та діагностики, оптимізація інформаційних потоків в середині автоматизованої системи контролю та діагностики, а як наслідок підвищення ефективності автоматизованої системи контролю та діагностики. Поставлена задача вирішується шляхом визначення АСКД на об'єкті контролю виду і кількості параметрів, що підлягають діагностуванню, після чого здійснюють побудову структури АСКД та проводить розподіл інформаційних потоків між окремими субблоками на основі графодирективного способу. Спосіб синтезу структури автоматизованої системи контролю та діагностики, при якому АСКД для синтезу структури та перерозподілу інформаційних потоків по мінімально допустимій пропускній спроможності між субблоками використовує традиційний підхід типу "знизу - вгору", при якому спочатку АСКД створює з окремих субблоків вузькоспеціалізований діагностичний модуль для діагностування конкретного параметру (групи параметрів) об'єкта контролю, щонайменше однієї характеристики або набір таких модулів (блоків), який відрізняється тим, що АСКД визначає на об'єкті контролю вид і кількість параметрів, що підлягає діагностуванню, після чого здійснюють побудову структури АСКД та проводить розподілу інформаційних потоків між окремими субблоками на основі графо-директивного способу. Концепція функціонально-структурного підходу до синтезу структури АСКД дозволить вирішити такі важливі завдання, як: - вибір раціонального варіанту взаємодії АСКД з ОК, тобто визначення виду і кількості інформації ОК, яка необхідна для реалізації функцій АСКД; - отримання раціонального методу реалізації закону функціонування АСКД, тобто такого її функціонального розбиття, при якому забезпечується найбільша ефективність АСКД; - забезпечення оптимальних зв'язків між функціями АСКД (упорядкування інформаційних потоків всередині АСКД). При синтезі АСКД функціонування системи можна змоделювати у вигляді дерева функцій системи (ДФС), вихідними даними для формування якого є цільове призначення і основні функції системи, які сформульовані в технічному завданні замовником. Як приклад, розглянемо 1 UA 121372 U основні функції контрольно-випробувальної пересувної станції (КВПС) 5К21. ДФС представляє декомпозицію цільової функції системи F 0 множини основних функцій F j на більш елементарні функції, що реалізовані на наступних рівнях декомпозиції. Реалізовані на і-му рівні j функції Fi j є мікрофункціями по відношенню до макрофункції Fi1 (і-1)-го порядку, що породжує їх (Фіг. 1). Декомпозиція триває до тих пір, поки не з'явиться можливість зв'язати функції нижніх рівнів дерева з відповідними компонентами елементної бази АСКД. Результатом синтезу ДФС є безліч функцій, які можливо розділити на дві групи: основні і додаткові. Основні функції - це функції, без реалізації яких неможливо досягти цілей існування системи проведення контролю та діагностування ОК. Додаткові - це функції, що розширюють можливості системи, сферу її застосування і сприяють поліпшенню показників якості АСКД. Для КВПС 5К21 декомпозиція цільової функції представлена наступним чином. На верхньому рівні реалізована цільова функція системи F 0 , суть якої - проведення повного комплексного контролю ОК. На першому рівні розташовані наступні функції: F1 - перевірка радіозривника, F 2 - перевірка автопілоту, і F 3 - перевірка каналу радіокерування. Відповідно до експлуатаційно-технічної документації АСКД складаються основні та додаткові функції другого та третього рівня. Основними функціями другого рівня є: F11 - увімкнення пульту 5Р93, стійки ІС-3 та перевірка 5 10 15 20 1 1 системи запобіжника, F2 - контроль струмів кристалічних детекторів, F3 - перевірка струму 2 2 живлення радіозривника, F12 - контроль напруг пульта 5Р93 автопілоту, F2 F4 - контроль 1...3 го каналу автопілоту, F13 25 - перевірку пульта 5Р93 і подання живлення на апаратуру радіокерування і радіовізирування, F23 - автономна перевірка апаратури радіокерування і радіовізирування. 1 1 Як додаткові функції другого рівня можуть виступати: F4 - контроль анодних напруг, F5 1 перевірка приймача та передавача радіозривника, F6 - вимкнення радіозривника, F32 вимкнення автопілоту та заключні операції. 1 1 Основними функціями третього рівня є: F11 - перевірка радіозривника, F12 - перевірка 1 1 2 радіозривника, F21 F27 - контроль струмів 1-7-го кристалічних детекторів, F11 - перевірка 30 2 3 рульових блоків, F12 - перевірка пневмосистеми, F21 - перевірка часу готовності апаратури 3 3 радіокерування і радіовізірування, F22 - перевірка частоти сигналу відповіді, F23 - перевірка 3 чутливості по сигналам команд і сигналам запиту, F24 - перевірка часу затримки імпульсу 3 відповіді, F25 - перевірка тривалості імпульсу відповіді. 35 40 45 50 1 1 Додатковими функціями третього рівня можуть бути: F41 F43 - перевірка чутливості 1-3 антенних каналів. З Фіг. 1 можна побачити, що будь-яка функція (основна або додаткова) може мати декілька варіантів декомпозиції на мікрофункції. Крім того, для одного і того ж набору основних функцій склад і вид додаткових функцій може істотно змінюватися. Різною може бути і послідовність їх реалізації. На основі інструкції для АСКД складається таблиця можливих функціональних зв'язків між функціями системи. В той же час, бінарне відношення може бути наведено у вигляді графа G(F) з множиною вершин F [5-6]. Перехід від множинного опису варіантів функціонального розбиття АСКД до графової моделі дозволяє спростити пошук варіантів структур АСКД. На Фіг. 2 наведений орграф G(F,U), що описаний за допомогою матриці суміжності M(F), без петель і циклів з початкової "h" та кінцевої "k" вершинами. Потрібно скласти список всіх простих "h-k" шляхів (тобто шляхів, в яких жодна вершина не зустрічається двічі). Вимога про наявність однієї початкової "h" та однієї кінцевої "k" вершини в графі не є принциповим. Можна легко перейти від множини {h} входів і множини {k} виходів до єдиного входу і виходу шляхом введення фіктивних вхідної і вихідної вершин і з'єднання їх з фактичними входами і виходами. 2 UA 121372 U В основі алгоритму генерації шляхів графів покладено наступне твердження. Будь-яка вершина fi з множини F \ {h,k } графа G(F,U) породжує Ni deg fi deg fi 1 нових шляхів, що проходять через неї, де: deg fi 5 n mij j 1 - напівступені заходу вершини fi ; n deg fi mik - напівступені виходу вершини fi ; k 1 де n - кількість вершин; m ij - елементи матриці суміжності. На Фіг. 3а вершина fi не породжує жодного нового шляху, тобто скільки шляхів в неї 10 входить, стільки і виходить. На Фіг. 3б вершина fi породжує один новий шлях (входить один, виходять - два), а на Фіг. 3в - чотири шляхи, так як кожен вхідний шлях розмножується на три (тобто увійшло два шляху, а вийшло - шість). Тобто до шляхів, які виходять з множини початкових вершин {h} , кожна вершина графа з множини F \ {h,k } додає N i нових шляхів. Таким чином, загальна кількість шляхів у графі дорівнює: k n l 1 i 1 N deg hl deg fi deg fi 1 . 15 20 25 Результатом роботи алгоритму є матриця шляхів графа G(F), по рядках якої записуються послідовності номерів вершин, що входять в різні шляхи i hil, fi1, fi2 ,,k im . L визначає число рядків в матриці метрики шляху (МШ), тобто число різних шляхів. Для визначення кількості стовпців матриці МШ введено поняття рівня вершини. Рівень вершини fi - це довжина шляху від будь-якої початкової вершини до вершини fi . Так як в графі є декілька шляхів, то одна і та ж вершина може знаходитися на різних рівнях. Максимальна довжина шляху L і визначає кількість рівнів вершин графа. Таким чином, матриця МШ має розмірність N L , а її елементи вказують номер вершини в і-му шляху на j-му рівні. Заповнення матриці МШ здійснюється за наступним алгоритмом: 1. Визначається число шляхів Nh , в яких початковою є вершина hi : n i Nhi deg hi deg fi deg fi 1 . i 1 30 2. У перший стовпець матриці МШ з першої по Nh -у строку записується номер вершини hi . i 3. Знищується вершина hi і в якості початкових вершин розглядаються вершини 1-го рівня. 4. Виконується пункт 1. 5. Виконується пункт 2. 6. Знищуються вершини першого рівня, здійснюється перехід до вершин другого рівня і т.д. Матриця суміжності, що описує граф варіантів функціональної організації АСКД має вигляд: 3 UA 121372 U 5 10 15 20 25 Усього можливо отримати 51 варіант структурної організації АСКД. Після проведення внутрішньоваріантної оптимізації, яка здійснюється за окремими критеріями, вибраний варіант описується послідовністю функцій, наприклад: f8 f13 f16 f15 f14 f10 f11 f12 f3 f17 f18 f5 f20 f21 f6 f7 f23 f22 f26 f25 . Зазначений спосіб синтезу структури автоматизованої системи контролю та діагностики дозволить знайти раціональну функціонально-структурну організацію АСКД та реалізувати основне цільове призначення АСКД з меншими обчислювальними затратами. Технічний результат від застосування зазначеного способу полягає у зменшенні обчислювальних затрат для синтезу структури автоматизованої системи контролю та діагностики, оптимізації інформаційних потоків в середині автоматизованої системи контролю та діагностики, а як наслідок підвищення ефективності автоматизованої системи контролю та діагностики. Джерела інформації: 1. Месарович М., Такахара И. Общая теория систем: математические основы. Пер. с англ. М.: "Мир", 1978. - 312 с. - аналог; 2. Берталанфи Л. фон. Общая теория систем - критический обзор. // Исследования по общей теории систем: Сборник переводов / Общ. ред. В.Н. Садовского и Э.Г. Юдина. - М.: Прогресс, 1969. - С. 23-82. - аналог. 3. Гнедов Г.М., Россенбаули О.Б., Шумов Ю.А. Проектирование систем контроля ракет. М.: Машиностроение, 1975. 224 с. - аналог; 4. Kay J. Foundations for corporate success: how business strategies add value. Oxford, 1993. прототип. 5. Гнедов Г.М., Россенбаули О.Б., Шумов Ю.А. Проектирование систем контроля ракет. М.: Машиностроение, 1975, - 224 с. 6. Оре О. Теория графов. - М.: Наука, 1980, - 336 с. 4 UA 121372 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 Спосіб синтезу структури автоматизованої системи контролю та діагностики (АСКД), в якому АСКД для синтезу структури та перерозподілу інформаційних потоків по мінімально допустимій пропускній спроможності між субблоками використовує традиційний підхід типу "знизу-вгору", при якому спочатку АСКД створює з окремих субблоків вузькоспеціалізований діагностичний модуль для діагностування конкретного параметру (групи параметрів) об'єкта контролю, щонайменше однієї характеристики або набір таких модулів (блоків), який відрізняється тим, що АСКД визначають на об'єкті контролю вид і кількість параметрів, що підлягають діагностуванню, після чого здійснюють побудову структури АСКД та проводять розподіл інформаційних потоків між окремими субблоками на основі графо-директивного способу. 5 UA 121372 U 5 Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: автоматизованої, системі, структури, синтезу, спосіб, контролю, діагностики
Код посилання
<a href="https://ua.patents.su/8-121372-sposib-sintezu-strukturi-avtomatizovano-sistemi-kontrolyu-ta-diagnostiki.html" target="_blank" rel="follow" title="База патентів України">Спосіб синтезу структури автоматизованої системи контролю та діагностики</a>
Спосіб нормування вхідних даних автоматизованої штучної нейронної системи технічного контролю
Номер патенту: 42292
Опубліковано: 25.06.2009
Автор: Арутюнян Ашот Леонович
МПК: G06F 15/00
Мітки: штучної, системі, технічного, автоматизованої, нейронної, нормування, контролю, вхідних, спосіб, даних
Формула / Реферат:
Спосіб нормування автоматизованої штучної нейронної системи технічного контролю, який включає периферійні пристрої - блоки та центральний процесор із системою лінійного нормування вхідних даних для навчання штучних нейронних систем, який відрізняється тим, що додатково автоматизують нормування вхідних даних автоматизованої штучної нейронної системи технічного контролю, яка включає периферійні пристрої - блок лінійного переднормування, блок...
Спосіб реалізації автоматизованої системи контролю за оборотом документів і товарів
Номер патенту: 54236
Опубліковано: 25.10.2010
Автори: Новіков Олексій Миколайович, Янгаличев Руслан Наріманович
МПК: G06K 17/00, G06Q 90/00
Мітки: автоматизованої, системі, реалізації, спосіб, контролю, товарів, оборотом, документів
Формула / Реферат:
Спосіб реалізації автоматизованої системи контролю за оборотом документів і товарів, який полягає у наступному: виробники (імпортери) товару за допомогою клієнтських модулів вводу даних та зв'язку виробників (імпортерів) з УА формують заявку на одержання дозволу на ввезення та реалізацію товарів та відповідну кількість захисних (маркувальних) елементів; сформована заявка надходить через блок зв'язку та маршрутизації УА до блока обробки,...
Ідентифікатор компонентів автоматизованої системи
Номер патенту: 28617
Опубліковано: 10.12.2007
Автор: Костерін Олексій Сергійович
МПК: G08G 1/00
Мітки: автоматизованої, компонентів, системі, ідентифікатор
Формула / Реферат:
Ідентифікатор компонентів автоматизованої системи, що складається з мікроконтролера, який відрізняється тим, що додатково містить мікросхему інтерфейсу, яка виконана з можливістю інтегрування у кожний компонент системи.
Вимірювальний перетворювач для автоматизованої діагностики стану серцево-судинної системи
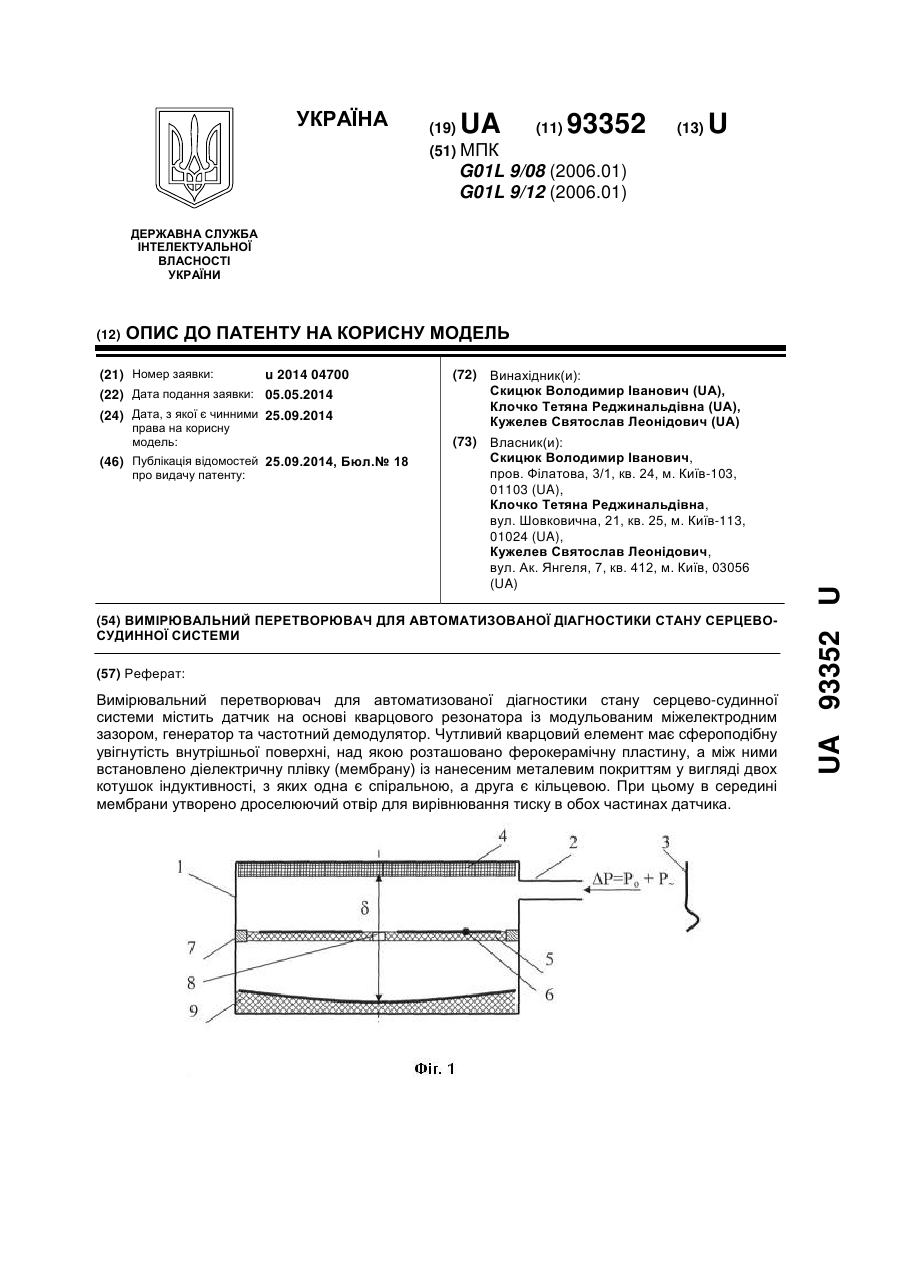
Номер патенту: 93352
Опубліковано: 25.09.2014
Автори: Скицюк Володимир Іванович, Клочко Тетяна Реджинальдівна, Кужелев Святослав Леонідович
Мітки: вимірювальний, серцево-судинної, перетворювач, діагностики, стану, автоматизованої, системі
Формула / Реферат:
Вимірювальний перетворювач для автоматизованої діагностики стану серцево-судинної системи, що містить датчик на основі кварцового резонатора із модульованим міжелектродним зазором, виходи якого підключено до генератора, частотний демодулятор, який відрізняється тим, що чутливий кварцовий елемент має сфероподібну увігнутість внутрішньої поверхні, над якою розташовано ферокерамічну пластину, а між ними встановлено діелектричну плівку...
Спосіб автоматизованої діагностики порушень уродинаміки нижніх сечових шляхів
Номер патенту: 72778
Опубліковано: 27.08.2012
Автори: Квятковський Олександр Євгенович, Глухова Наталія Вікторівна, Квятковський Євген Аркадійович, Квятковська Тетяна Олександрівна
МПК: A61B 8/00
Мітки: сечових, діагностики, шляхів, порушень, уродинаміки, нижніх, автоматизованої, спосіб
Формула / Реферат:
Спосіб автоматизованої діагностики порушень уродинаміки нижніх сечових шляхів, що включає урофлоуметричні дослідження у вигляді прямої графічної реєстрації об'ємної швидкості потоку сечі, обчислення урофлоуметричного індексу, отримання оцифрованих даних урофлоуметричних досліджень та подальший їх аналіз, який відрізняється тим, що оцифровані дані урофлоуметричних досліджень обробляють шляхом цифрової фільтрації та спектрального аналізу, на...
Попередній патент: Багатоопераційне дискове ґрунтообробне знаряддя
Наступний патент: Суперміцна дорога
Випадковий патент: Рідка самотвердіюча суміш для виготовлення ливарних стрижнів та форм