Спосіб автоматичного регулювання швидкості автомобіля
Номер патенту: 16482
Опубліковано: 15.08.2006
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Мариношенко Олександр Петрович

Формула / Реферат
Спосіб автоматичного регулювання швидкості автомобіля, що включає формування сигналу завдання, пропорційного заданій швидкості автомобіля, вимірювання сигналу, пропорційного частоті обертання вала двигуна автомобіля, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, який відрізняється тим, що шляхом незалежного регулювання коефіцієнтів по сигналу завдання і моменту зовнішнього навантаження сигнал, пропорційний частоті обертання вала двигуна, масштабують, отриманий результат порівнюють з сигналом завдання і формують сигнал на вході моделі, пропорційно отриманій різниці, визначають сигнал на виході моделі, отримане значення масштабують, визначають значення моменту зовнішнього навантаження відповідно з рівнянням
![]() ,
,
вимірюють значення задавального сигналу і частоту обертання вала двигуна, визначають значення сигналу компенсації діючого моменту навантаження відповідно з рівнянням
![]()
причому коефіцієнт масштабування сигналу, пропорційного частоті обертання вала двигуна дорівнює
![]()
а коефіцієнт передачі моделі задають у вигляді
![]()
де ![]() - частота обертання вала двигуна;
- частота обертання вала двигуна;
![]() - задавальний сигнал;
- задавальний сигнал;
![]() - сигнал компенсації;
- сигнал компенсації;
![]() - сигнал на виході моделі;
- сигнал на виході моделі;
![]() - зовнішній момент навантаження;
- зовнішній момент навантаження;
![]() - коефіцієнт передачі по керуючому впливу;
- коефіцієнт передачі по керуючому впливу;
![]() - коефіцієнт передачі вимірюваної частоти обертання вала двигуна;
- коефіцієнт передачі вимірюваної частоти обертання вала двигуна;
![]() - коефіцієнт передачі по навантаженню;
- коефіцієнт передачі по навантаженню;
![]() - необхідний етатизм системи;
- необхідний етатизм системи;
![]() ,
, ![]() ,
, ![]() ,
, ![]() - постійні коефіцієнти, що зберігаються в пам'яті мікропроцесора,
- постійні коефіцієнти, що зберігаються в пам'яті мікропроцесора,
а сигнал керування формують як адитивну суміш задавального сигналу і сигналу компенсації.
Текст
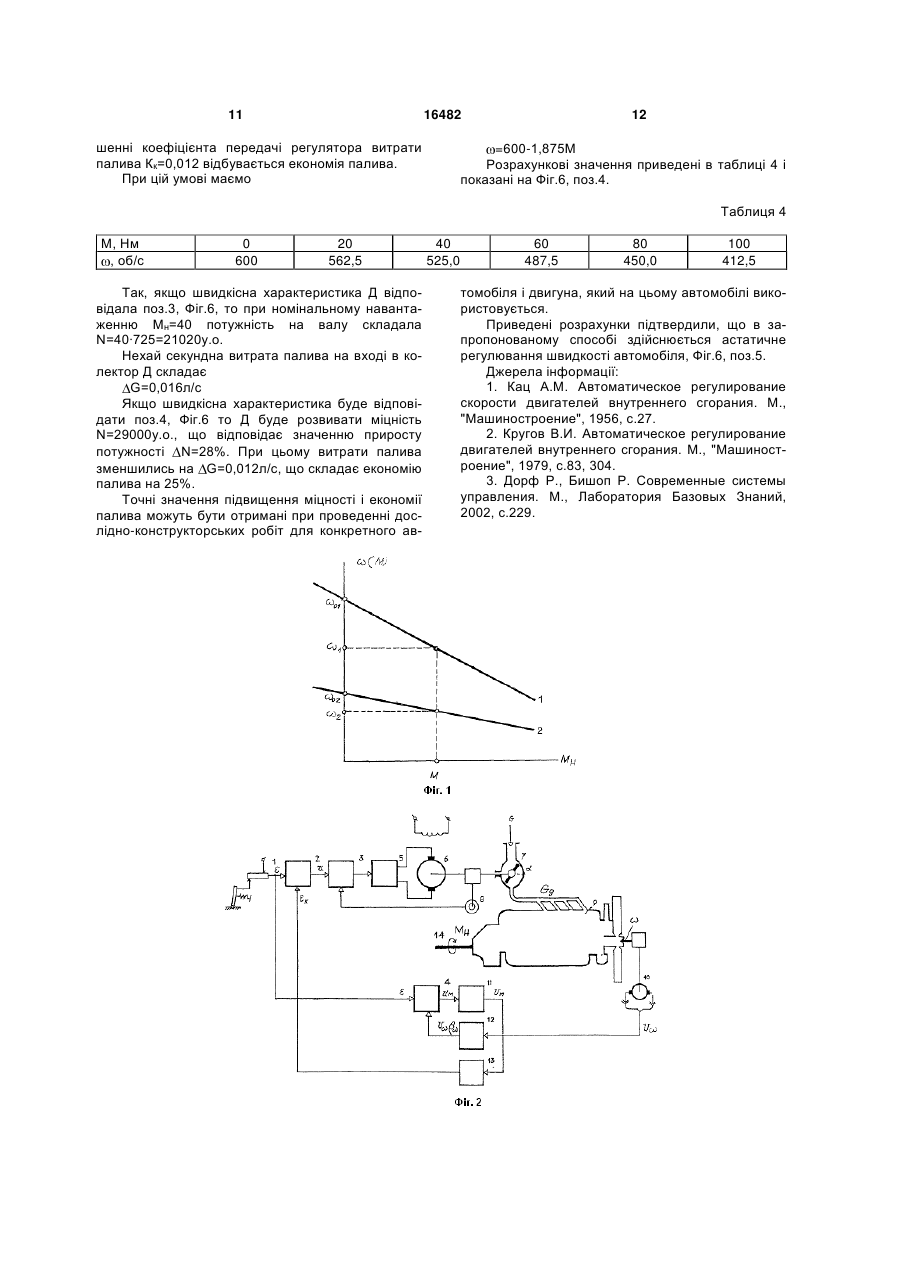
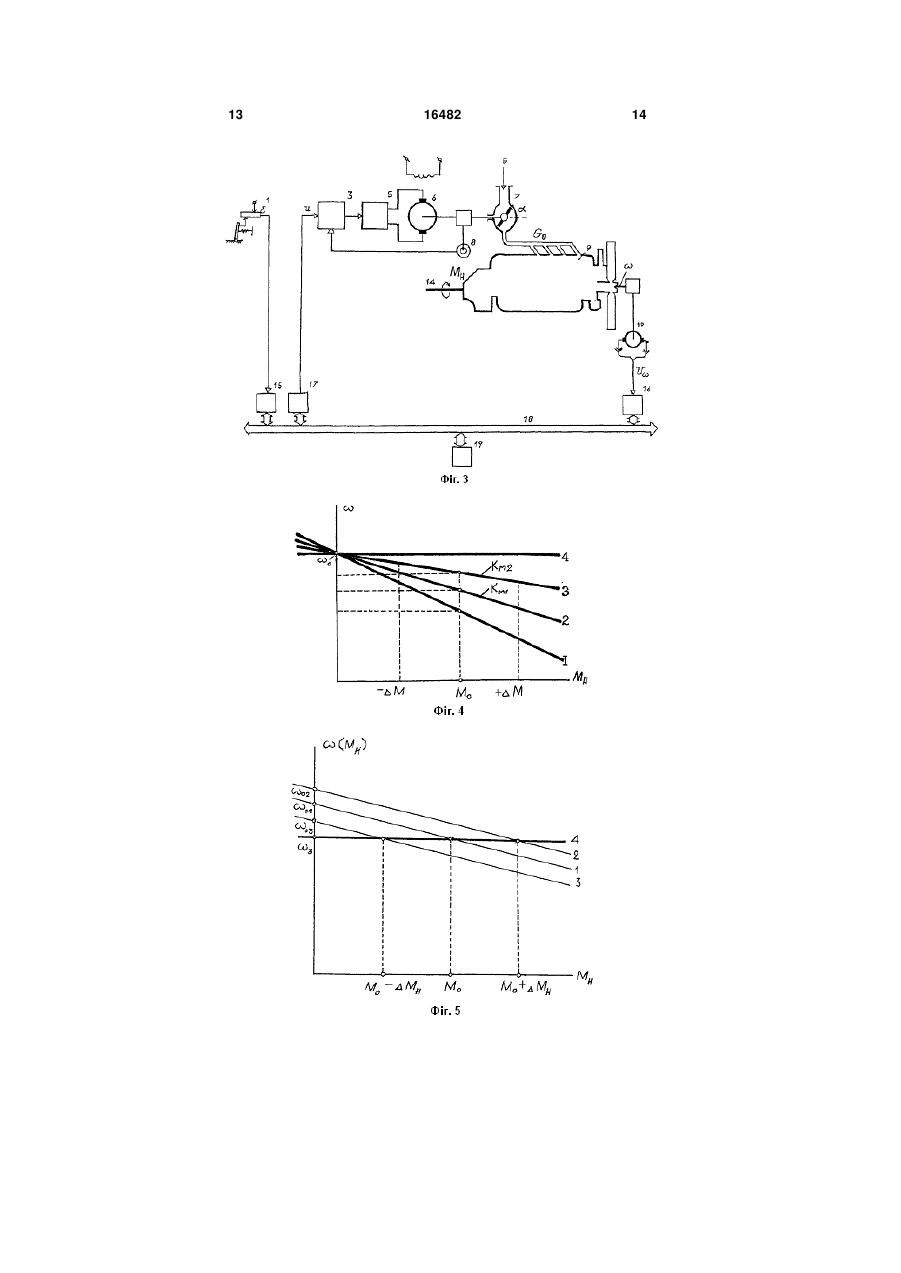
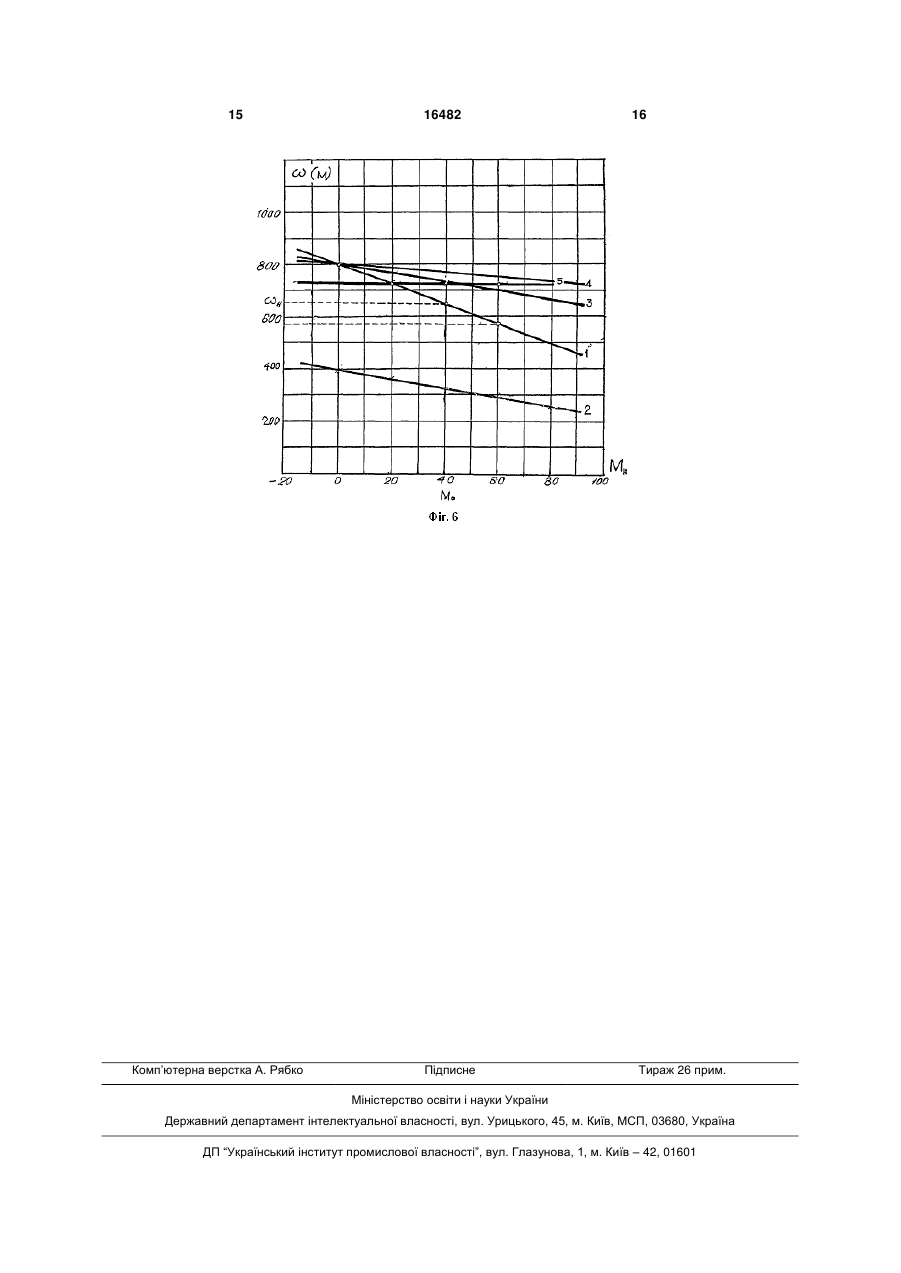
Спосіб автоматичного регулювання швидкості автомобіля, що включає формування сигналу завдання, пропорційного заданій швидкості автомобіля, вимірювання сигналу, пропорційного частоті обертання вала двигуна автомобіля, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, який відрізняється тим, що шляхом незалежного регулювання коефіцієнтів по сигналу завдання і моменту зовнішнього навантаження сигнал, пропорційний частоті обертання вала двигуна, масштабують, отриманий результат порівнюють з сигналом завдання і формують сигнал на вході моделі, пропорційно отриманій різниці, визначають сигнал на виході моделі, отримане значення масштабують, визначають значення моменту зовнішнього навантаження відповідно з рівнянням Мн аUм , вимірюють значення задавального сигналу і частоту обертання вала двигуна, визначають значен ня сигналу компенсації діючого моменту навантаження відповідно з рівнянням εк b1ω b2Mн b3ε, причому коефіцієнт масштабування сигналу, пропорційного частоті обертання вала двигуна дорівнює 1 βω , кuк ω а коефіцієнт передачі моделі задають у вигляді Мнкн Sкuε км , Sкuε де ω - частота обертання вала двигуна; ε - задавальний сигнал; ε к - сигнал компенсації; Корисна модель відноситься до галузі автомобілебудування і може бути використана в системах автоматичного регулювання швидкості автомобіля. Відомий спосіб автоматичного регулювання швидкості автомобіля шляхом зміни витрати палива, що поступає до двигуна внутрішнього згорання (ДВЗ) зворотно, пропорційно зміні частоти обертання вала ДВЗ [1, 2]. Недоліком відомого способу є зменшення сумарного коефіцієнта передачі замкненої системи. Відомий спосіб автоматичного регулювання швидкості автомобіля, який полягає в тому, що формують сигнал задання, пропорційний заданій швидкості автомобіля, вимірюють частоту обертання вала ДВЗ, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання [3], прототип. Недоліками прототипу є зменшення потужності ДВЗ і, як наслідок, швидкості автомобіля. Так як швидкість автомобіля залежить від частоти обертання вала двигуна (Д), то автоматичне регулю Uм - сигнал на виході моделі; обертання вала двигуна; к н - коефіцієнт передачі по навантаженню; (19) UA (11) S - необхідний етатизм системи; а , b1 , b 2 , b 3 - постійні коефіцієнти, що зберігаються в пам'яті мікропроцесора, а сигнал керування формують як адитивну суміш задавального сигналу і сигналу компенсації. (13) к ω - коефіцієнт передачі вимірюваної частоти 16482 к u - коефіцієнт передачі по керуючому впливу; U Мн - зовнішній момент навантаження; 3 вання швидкості автомобіля зводиться до автоматичного регулювання частоти обертання вала Д. Лінійна форма природної характеристики Д відповідає рівнянню =kuu-kнMн (1) де - частота обертання вала Д; u - сигнал керування; Мн - момент навантаження на валу; ku - коефіцієнт передачі по керуючому діянню; kн - коефіцієнт передачі по моменту навантаження. Вид цієї характеристики приведено на фігурі 1, позиція 1, прототип. З фігури очевидно, що зміна моменту навантаження Мн на величину Мн відносно номінального Мн приводить до значних помилок формування частоти обертання вала Д. При використанні способу автоматичного регулювання частоти обертання вала Д по прототипу характеристика (1) має вид: кu кн Mн (2) 1 кu 1 кн де - сигнал завдання; - коефіцієнт зворотнього зв'язку. Вид цієї характеристики приведено на фігурі 1, позиції 2. Очевидно, що помилка регулювання при зміні моменту навантаження зменшується, але зменшується також вільна частота обертання 0, що приводить до того, що автоматичне регулювання частоти обертання вала Д відбувається на менших частотах регулювання, що відповідає рівнянню (3), що зменшує потужність N на валу Д. N=Mн (3) Зменшення діапазону регульованих частот обертання вала Д, які через трансмісію передаються на колеса автомобіля, що призводить до зменшення швидкості автомобіля. Підвищення швидкості автомобіля можливе за допомогою підвищення розходу палива, яке подається до Д. При збільшенні коефіцієнта ku прямого перетворення система наближається до коливальної межі, що зменшує запас стійкості перехідних процесів регулювання. В цьому складається суперечність між вимогою по точності і вимогою стійкості в прототипі. Задачею корисної моделі є підвищення потужності на валу Д, підвищення запасу стійкості перехідних процесів та економія палива. Поставлена задача досягається тим, що в способі автоматичного регулювання швидкості автомобіля, який полягає в тому, що формують сигнал завдання, пропорційний заданій швидкості автомобіля, вимірюють частоту обертання вала Д, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання. Новим є те, що шляхом незалежного регулювання коефіцієнтів по сигналу завдання і моменту зовнішнього навантаження сигнал, пропорційний частоті обертання вала двигуна масштабують, отриманий результат порівнюють з сигналом завдання і формують сигнал на вході моделі, пропорційно отриманій різниці, визначають сигнал на виході моделі, отримане значення масштабують, 16482 4 визначають значення моменту зовнішнього навантаження відповідно з рівнянням Мн=аUм, вимірюють значення задавального сигналу і частоту обертання вала двигуна, визначають значення сигналу компенсації діючого моменту навантаження відповідно з рівнянням к=b1 +b2Мн-b3 при чому коефіцієнт масштабування сигналу, пропорційного частоті обертання вала двигуна дорівнює 1 кuк а коефіцієнт передачі моделі задають у вигляді Мнкн Sкu км Sкu де - частота обертання вала двигуна; - задавальний сигнал; к - сигнал компенсації; Uм - сигнал на виході моделі; Мн - зовнішній момент навантаження; Ки - коефіцієнт передачі по керуючому впливу; K - коефіцієнт передачі вимірюваної частоти обертання вала двигуна; Кн - коефіцієнт передачі по навантаженню; S - необхідний етатизм системи; а, b1, b2, b3 - постійні коефіцієнти, що зберігаються в пам'яті мікропроцесора, а сигнал керування формують як адитивну суміш задавального сигналу і сигналу компенсації. На Фіг.2 приведена схема системи автоматичного регулювання (CAP) швидкості автомобіля. На Фіг.3 приведена схема CAP швидкості автомобіля з використанням мікропроцесора (МП). На Фіг.4 приведені швидкісні характеристики автоматичного регулювання згідно з запропонованим способом. На Фіг.5 приведені швидкісні характеристики Д. На Фіг.6 приведені характеристики регулювання до розрахункових прикладів. CAP для здійснення запропонованого способу містить формувач сигналу завдання (акселератор) 1, перший, другий і третій 2, 3, 4 суматори, підсилювач 5, регулятор 6, карбюратор 7, давач положення заслінки карбюратора 8, двигун 9, давач 10 сигналу частоти обертання валу Д - тахометр (Т), модель 11, перший та другий 12, 13 масштабні перетворювачі (МП), ведучий вал (трансмісія) 14. Блоки 3, 5, 6, та 8 утворюють слідкуючу систему підпорядкованого регулювання і виконують роль контролера положення дроселя карбюратора. CAP на Фіг.3 отримає перший і другий 15 і 16 модулі вводу аналогових сигналів (АЦП). Модуль виводу цифрових сигналів (ЦАП) 17, інтерфейс 18, процесор 19. CAP на Фіг.3 відрізняється від CAP на Фіг.2 тим, що блоки 2, 4, 11, 12, 13, реалізуються програмним шляхом в МП. Спосіб здійснюється наступним чином. Сигнал, пропорційний частоті обертання вала Д відповідає рівнянню 5 U =k (4) де - частота обертання вала Д; U - сигнал на виході Т; - коефіцієнт пропорційності. Рівняння моделі має вид Uм=kмuм (5) де uм - сигнал на вході моделі; Uм - сигнал на виході моделі; kм - коефіцієнт передачі моделі. Далі, сигнал U масштабують, сумують з сигналом завдання є і формують сигнал на вході моделі згідно з рівнянням uм= -U (6) де - сигнал завдання, який отримують переміщенням важеля акселератора, наприклад, за допомогою потенціометра; - коефіцієнт МП 12. Сигнал Uм на виході моделі масштабують, порівнюють із сигналом завдання є і формують сигнал керування u на вході слідкуючої системи відповідно рівнянню. u= +Uм м (7) де м - коефіцієнт МП 13 Тоді, відповідно рівнянням (4), (5), (6), (7) отримуємо систему двох взаємопов'язаних рівнянь: =ku( +Uм м)-kнMн (8) Uм=kм( -k ) (9) Або -ku мUм=ku -kнMн (10) k мk +Uм=kм (11) Систему (10), (11) можна подати в матричній формі 1 ku м k - i Ii (12) kмk 1 Uм 0 Рішенням системи (12) будуть рівняння (1+кuкмк м) =кu(1+км м) -кнМн (13) ˆˆˆ ˆ ˆ ˆ ˆ (1 eeeI e eм (1 euk ) eмIi (14) I )Uм Таким чином в результаті цілеспрямованих дій над матеріальними об'єктами, одним із яких є Д 9, а другим модель 11, отримано 2 параметричновзаємозалежні функціональні перетворення, одне з яких визначає частоти обертання вала Д 11 від сигналу завдання і зовнішнього моменту навантаження Мн і друге - залежність сигналу Uм на виході моделі 11 від сигналу завдання є і моменту навантаження які визначаються функціональними перетвореннями (15) і (16). ku (1 kм м ) kukнk Мн (15) 1 kukмk м 1 kukмk м kм (1 kuk ) kмk kн м Мн (16) 1 kukмk м 1 kukмk м Якщо співставити рівняння (15) і (16), то очевидно, що вони ідентичні за своєю структурою, причому рівняння (16) є дзеркальним відображенням рівняння (15), тому блок 11, названий моделлю, а описана вище взаємодія названа рефлексиUм 16482 6 вною взаємодією, а зв'язки 2-13 і 3-12 названі рефлексивними. При виконанні умови кuk =1, (17) що легко досягається вибором коефіцієнта передачі , МП 12 =1/кuk одержимо наступну систему рівнянь, що характеризує процеси регулювання в новій структурі kн кu Мн (18) 1 км м kн Мн (19) 1 км м З рівняння (19) випливає, що сигнал Uм на виході моделі 11, пропорційний діючому моменту навантаження Мн і інваріантний від сигналу завдання . Звідки М=аUм, (20) 1 kм м де a kн це означає, що момент навантаження Мн пропорційний сигналу Uм на виході моделі 11. Якщо навантаження на регульовану координату відповідає деякому номінальному значенню Мн=М0, а сигнал завдання - значенню 3, тоді: kн М0 (21) 0 1 км м Або kн М0 (22) 3 кu 3 1 км м Uм де 0 - значення частоти обертання при Мн=0 (точка холостого ходу). З рівняння (18) випливає, що швидкість автомобіля відповідає рівнянню (23), яка контролюється по спідометру V=kт (23) де kт - коефіцієнт, який визначає залежність швидкості автомобіля від частоти обертання вала Д. Загальним в регульованих характеристиках, що представлені на Фіг.4 є те, що всі вони проходять через точку холостого ходу 0, а різниця полягає в тому, що вони володіють різними коефіцієнтами етатизму S, який визначає похибку регулювання відносно зовнішнього збурення. kнMн (24) S кu (1 км м ) Звідки може бути отримано рівняння для одержання значення коефіцієнта моделі 11 kм відповідно заданому значенню етатизму механічної характеристики (MX). kнMн кuS (25) kм кuS На Фіг.4 приведені MX, отримані при різних значеннях kм-kм1
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automated control of speed of a vehicle
Назва патенту російськоюСпособ автоматической регулировки скорости автомобиля
МПК / Мітки
МПК: F02D 31/00
Мітки: регулювання, автомобіля, швидкості, спосіб, автоматичного
Код посилання
<a href="https://ua.patents.su/8-16482-sposib-avtomatichnogo-regulyuvannya-shvidkosti-avtomobilya.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного регулювання швидкості автомобіля</a>
Спосіб автоматичного регулювання кутової швидкості електропривода
Номер патенту: 59878
Опубліковано: 15.09.2003
Автори: ТРОНЬ ЮРІЙ ОПАНАСОВИЧ, Прохорчук Олександр Віталійович, Збруцький Олександр Васильович
МПК: H02P 5/00
Мітки: регулювання, спосіб, автоматичного, електропривода, швидкості, кутової
Формула / Реферат:
Спосіб автоматичного регулювання кутової швидкості електропривода, який полягає в тому, що формують задавальний сигнал, вимірюють сигнал, пропорційний значенню кутової швидкості електропривода, задавальний сигнал порівнюють із сигналом, пропорційним кутовій швидкості електропривода, результат порівняння алгебраїчно підсумовують із сигналом, пропорційним моменту навантаження, і формують сигнал керування електроприводом пропорційно отриманій...
Спосіб автоматичного регулювання кутової швидкості та пристрій для його здійснення
Номер патенту: 34183
Опубліковано: 15.02.2001
Автор: Ключковський Сергій Миронович
МПК: G05D 13/00
Мітки: швидкості, автоматичного, регулювання, кутової, спосіб, здійснення, пристрій
Текст:
...і сили акумулятора, то при зміні однієї з них, а саме - відцентрової сили, рівновага порушується і ланки здійснюють рух, змінюючи при цьому динамічний момент інерції системи. Наслідком зміни останнього є виникнення на валу крутного моменту, який запобігає подальшому відхиленню швидкості. Таким чином, відбувається автоматична зміна потоку рушійної енергії в регульованій системі, джерелом якої є акумулятор механічної енергії. Пристрій для...
Спосіб регулювання швидкості по відхиленню і регулятор швидкості для його здійснення
Номер патенту: 51957
Опубліковано: 16.12.2002
Автор: Сільченко Едуард Євгенович
МПК: H02P 5/00
Мітки: регулювання, відхиленню, регулятор, здійснення, швидкості, спосіб
Формула / Реферат:
1. Спосіб регулювання швидкості по відхиленню, де відхилення є різницею сигналів завдання на швидкість і зворотного зв’язку по швидкості, який відрізняється тим, що величину відхилення додатково зменшують на величину, рівну прогнозованій зміні швидкості при динаміці електропривода, яку спостерігають.2. Спосіб за п. 1, який відрізняється тим, що прогнозована зміна швидкості визначається за формулою:
Спосіб автоматичного регулювання напруги генератора
Номер патенту: 3527
Опубліковано: 15.11.2004
Автори: Прохорчук Олександр Віталійович, Збруцький Олександр Васильович, ТРОНЬ ЮРІЙ ОПАНАСОВИЧ
МПК: H02P 9/14
Мітки: регулювання, генератора, напруги, спосіб, автоматичного
Формула / Реферат:
Спосіб автоматичного регулювання напруги генератора, який полягає в тому, що формують сигнал завдання, пропорційний заданій напрузі генератора, вимірюють напругу на виході генератора, отримане значення порівнюють з сигналом завдання і формують сигнал похибки регулювання, який відрізняється тим, що результат порівняння подають на вхід моделі, сигнал, пропорційний сигналу на виході моделі, алгебраїчно підсумовують із сигналом завдання,...
Система автоматичного регулювання швидкості обертання електричних двигунів групи витяжних вентиляторів
Номер патенту: 72947
Опубліковано: 16.05.2005
Автори: Лавріненко Юрій Миколайович, Олійник Павло Вікторович, Лавінський Дмитро Сергійович, Мартиненко Іван Іванович
МПК: F24F 11/08
Мітки: обертання, електричних, швидкості, система, групи, регулювання, вентиляторів, витяжних, автоматичного, двигунів
Формула / Реферат:
Система автоматичного регулювання швидкості обертання електродвигунів групи витяжних вентиляторів, що містить датчик температури і перетворюючий пристрій, яка відрізняється тим, що як перетворюючий пристрій використаний керований пропорційно-інтегральним регулятором широтно-імпульсний перетворювач частоти струму, один вхід якого приєднаний до мережі живлення, другий вхід – до виходу регулятора, вихід – до двигунів приводу вентиляторів, а до...
Попередній патент: Пристрій для кріплення робочого інструменту та/або свердла з пазами в хвостовій частині
Наступний патент: Клапанний вузол видиху респіратора
Випадковий патент: Система керування озброєнням бойової машини