Універсальна установка для дослідження технологічних процесів в рослинництві
Номер патенту: 34293
Опубліковано: 11.08.2008
Автори: Прасолов Євген Якович, Слинько Олег Павлович, Панченко Світлана Миколаївна, Бурлака Олексій Анатолійович, Слинько Юлія Леонідівна
Формула / Реферат
1. Універсальна установка для дослідження технологічних процесів в рослинництві, що складається з рами, силової підлоги, редуктора, інертного навантажувача, лазера, шатуна, блока для контролю відносного переміщення рослинного матеріалу, що включає в себе генератор, вихід котрого підключений до першого електроду датчика і загального екрану, підсилювач, один із входів якого зв'язаний з загальним екраном, а інший - із другим електродом датчика і за допомогою елемента зворотного зв'язку - з виходом підсилювача і з входом детектора, при цьому вихід останнього зв'язаний із входом блока обробки сигналу, яка відрізняється тим, що на рамі закріплено розсувні бокові тримачі, підтримувачі для робочих органів (плуга, культиватора, борони, диска, сошника, фрези, котка, штанги обприскувача, обпилювача, пневматичного та гідравлічного струшувача), маркерів, сенсорів, поперечини, ґрунтового каналу, ґрунтової суміші, проміжного рушія, механізму регулювання кута підйому установки, вібраційного механізму, пристрою-модулятора підвищеної достовірності контролю, обладнаного модулятором, стабілізатором, навантажуючим елементом, діодом і конденсатором, перша обкладка якого заземлена, причому вихід блока обробки сигналу підключений до входу модулятора, а вихід останнього за допомогою стабілізатора і навантажуючого елемента підключений також до входу блока обробки сигналу і першого електроду діоду, другий електрод якого зв'язаний із другим електродом конденсатора і входом керування режимом роботи основного генератора.
2. Універсальна установка для дослідження технологічних процесів в рослинництві за п. 1, яка відрізняється тим, що бокові тримачі виконані з можливістю зміни їх довжини в межах 0-200 см, а підтримувачі для робочих органів виконані з можливістю переміщення робочим механізмом по градуйованих напрямних поперечинах, а маркери задають початкові умови для створення осі рядків з фіксованою шириною міжряддя, напрямних щілин для встановлення робочих органів відносно осі рядка.
3. Універсальна установка за пп. 1-2, яка відрізняється тим, що сенсори розташовані з можливістю негайної фіксації переміщення, опору, частоти обертання, тиску, витрати рідини і повітря, відхилення від прямолінійності руху, відхилення по висоті, по стабілізації руху в повздовжній та поперечній площинах, а пристрій-модулятор виконаний для збирання, обробки, аналізу, показу та зберігання інформації, що надійшла від сенсорів.
4. Універсальна установка за пп. 1-3, яка відрізняється тим, що ґрунтовий канал може рухатись з регульованою швидкістю 0,1...25 м/с і виконаний з можливістю моделювання фізико-механічних властивостей ґрунтової суміші природного і штучного походження.
5. Універсальна установка за пп. 1-4, яка відрізняється тим, що проміжний рушій виконаний з можливістю зміни передаточного відношення від електродвигуна до ґрунтового каналу, а механізм регулювання кута підйому установки виконаний з можливістю регулювання висоти піднімання від 0 до 50 см, причому вібраційний механізм виконаний з можливістю регулювання частоти коливань ґрунтового каналу в горизонтальній та вертикальній площинах.
6. Універсальна установка за пп. 1-5, яка відрізняється тим, що обладнана додатковими К-генераторами, вихід кожного із яких підключений паралельно виходу основного генератора, а вхід керування режимом роботи кожного додаткового генератора безпосередньо до комутуючого датчика, зв'язаного із іншим електродом діода, причому ці датчики зв'язані між собою і через блок обробки сигналу, виконаного у вигляді однокристального комп'ютера, сигнальний вихід якого зв'язаний з інформаційним табло, причому підсилювач виконаний по схемі диференціального підсилювача, а елемент зворотного зв'язку підсилювача виконаний у вигляді резистора та/або індуктивності.
7. Універсальна установка за пп. 1-6, яка відрізняється тим, що обладнана послідовно включенням блоків виділення екстремуму, пороговим блоком, другим модулятором і доповнюючим комутуючим датчиком, причому вихід детектора через доповнюючий комутуючий датчик зв'язаний із входом блока виділення екстремуму, вихід детектора також зв'язаний з додатковим входом порогового блока через той же додатковий комутуючий датчик, керуючий вхід якого підключений до другого електрода діода, а вихід другого модулятора зв’язаний з першим електродом діода.
8. Універсальна установка за пп. 1-7, яка відрізняється тим, що між електродами і загальним екраном розміщені діелектричні прокладки, причому кожен із електродів і відповідна йому діелектрична прокладка виконані гнучкими, а загальний екран, діелектричні прокладки виконані у вигляді стрічок.
9. Універсальна установка за пп. 1-8, яка відрізняється тим, що електроди виконані шляхом нанесення струмопровідної фарби або покриті еластичним вологонепроникним матеріалом, а загальний екран виконаний нанесенням струмопровідної фарби або еластичного водонепроникного матеріалу.
10. Універсальна установка за пп. 1-9, яка відрізняється тим, що електроди змонтовані на вузлі кріплення до сільськогосподарської машини, обладнаної елементами для фіксації в заданому місці машини, та встановлені паралельно на обернених одна до одної сторонах П-несучого кронштейна з можливістю зміни відстані між ними в межах від о до 150 см, з можливістю регулювання кута між ними в межах від 0 до 1800.
Текст
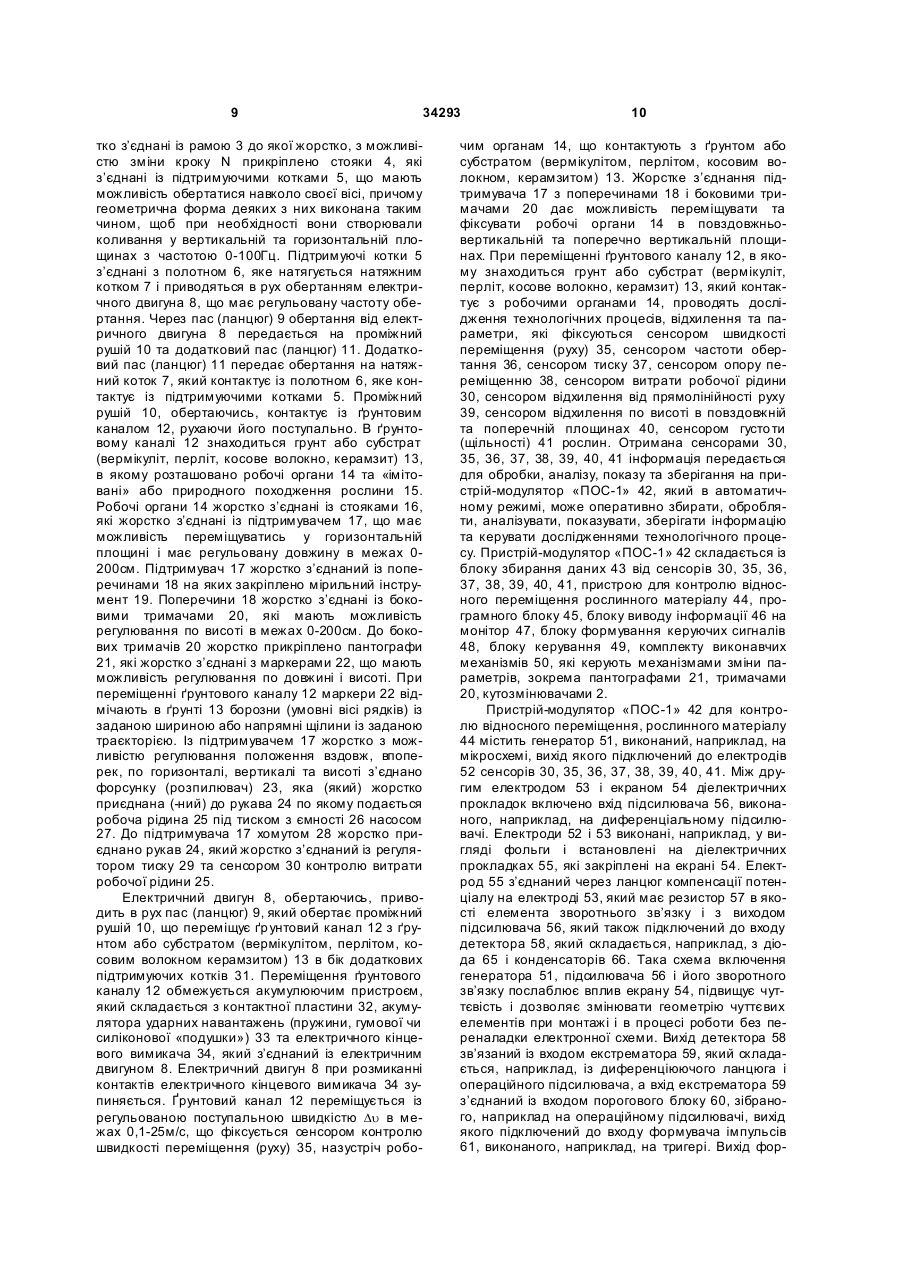
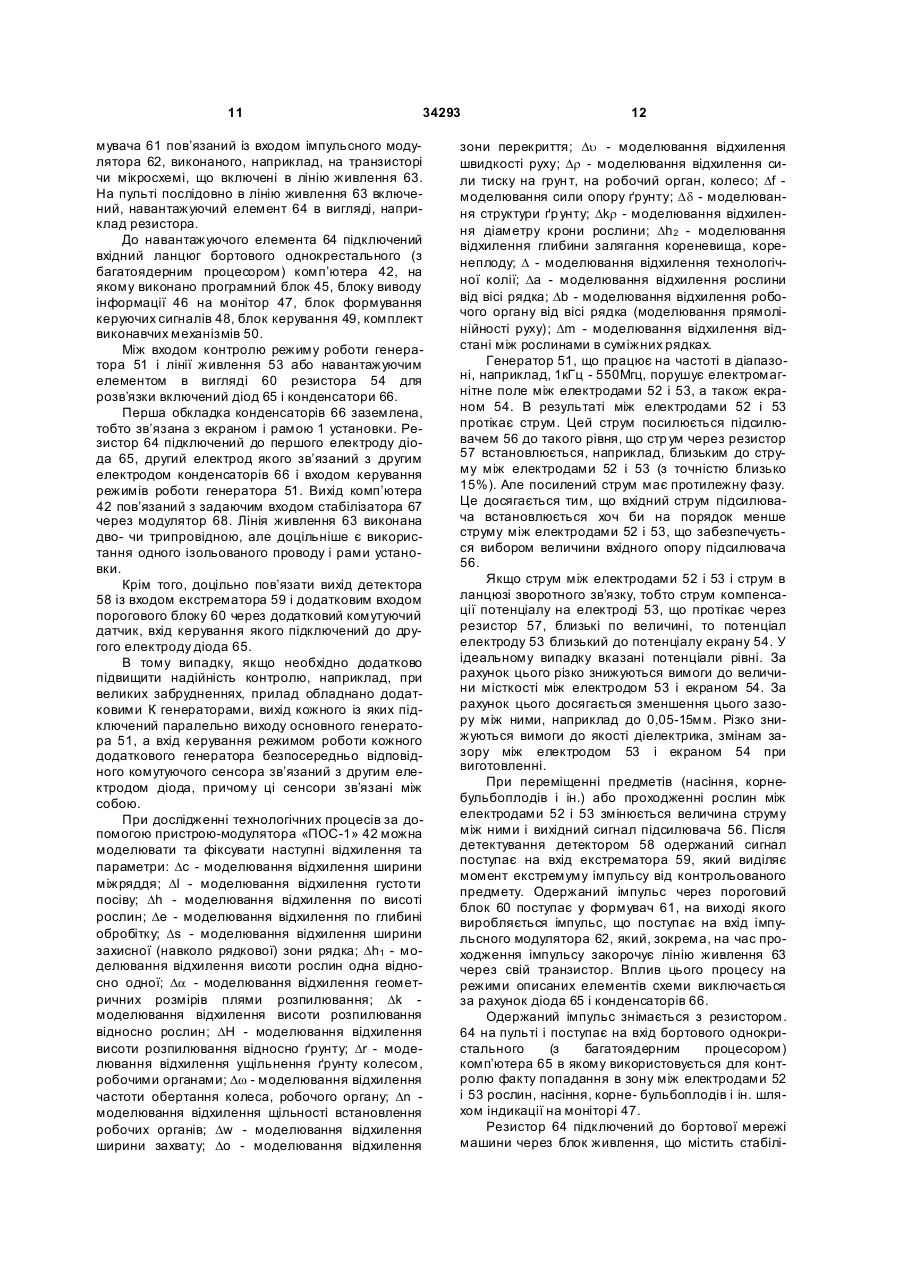
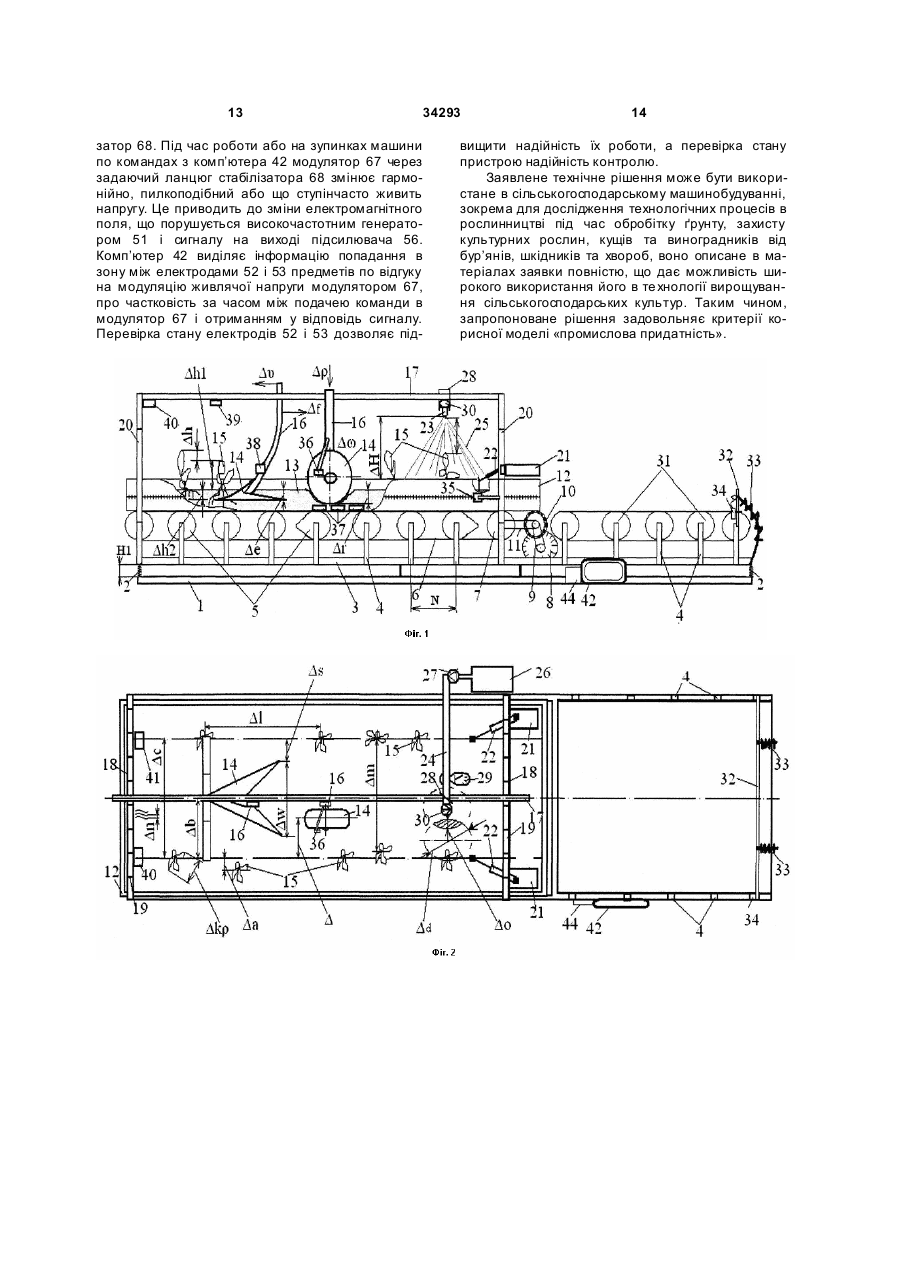
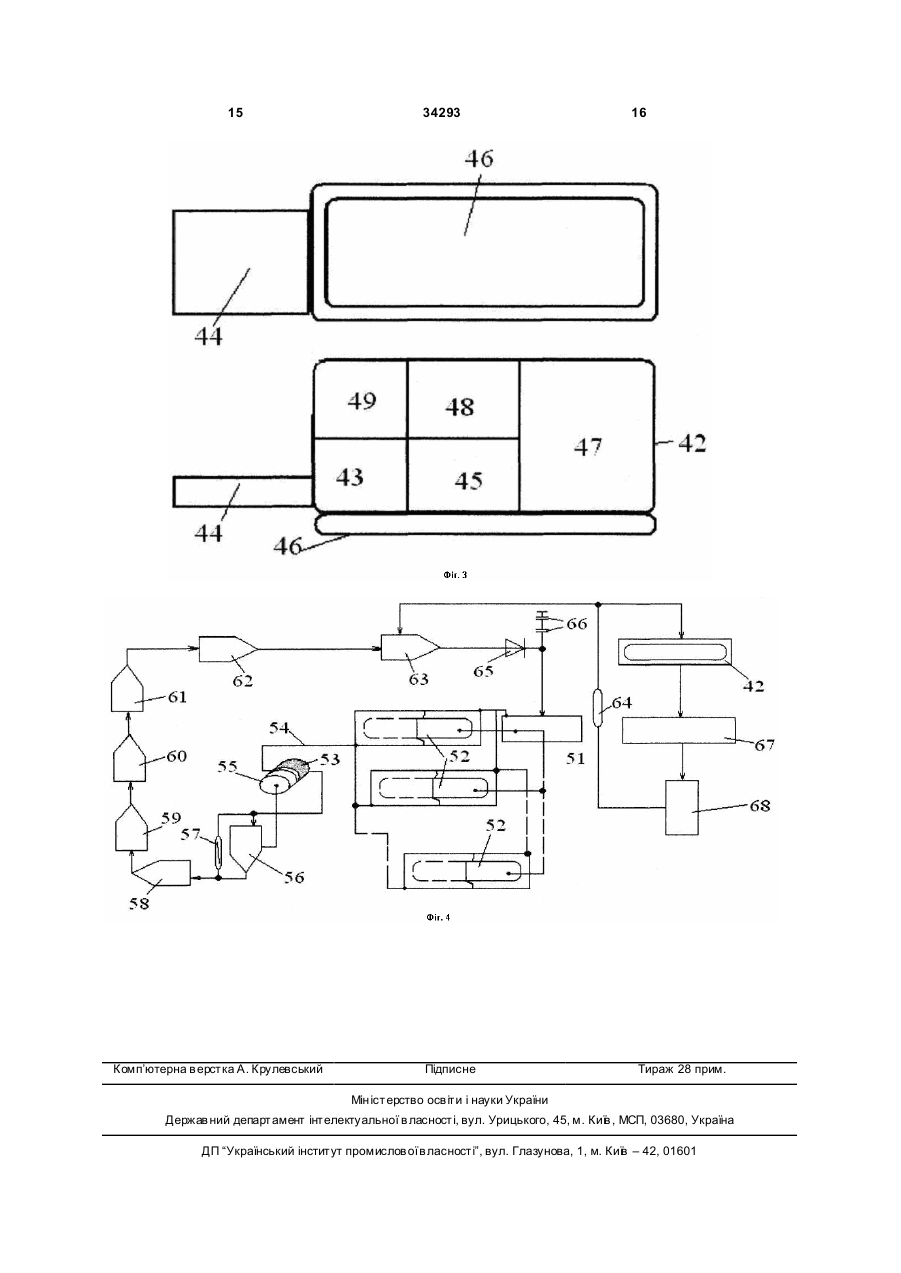
1. Універсальна установка для дослідження технологічних процесів в рослинництві, що складається з рами, силової підлоги, редуктора, інертного навантажувача, лазера, шатуна, блока для контролю відносного переміщення рослинного матеріалу, що включає в себе генератор, вихід котрого підключений до першого електроду датчика і загального екрану, підсилювач, один із входів якого зв'язаний з загальним екраном, а інший - із другим електродом датчика і за допомогою елемента зворотного зв'язку - з ви ходом підсилювача і з входом детектора, при цьому вихід останнього зв'язаний із входом блока обробки сигналу, яка відрізняється тим, що на рамі закріплено розсувні бокові тримачі, підтримувачі для робочих органів (плуга, культиватора, борони, диска, сошника, фрези, котка, штанги обприскувача, обпилювача, пневматичного та гідравлічного струшувача), маркерів, сенсорів, поперечини, ґрунтового каналу, ґрун тової суміші, проміжного рушія, механізму регулювання кута підйому установки, вібраційного механізму, пристрою-модулятора підвищеної достовірності контролю, обладнаного модулятором, стабілізатором, навантажуючим елементом, діодом і конденсатором, перша обкладка якого заземлена, причому ви хід блока обробки сигналу підключений до входу модулятора, а ви хід останнього за допомогою стабілізатора і навантажуючого елемента підключений також до входу блока обробки сигналу і першого електроду діоду, другий електрод якого зв'язаний із другим електродом конденсатора і входом керування 2. Універсальна установка для дослідження техрежимом роботи основного генератора. нологічних процесів в рослинництві за п. 1, яка відрізняє ться тим, що бокові тримачі виконані з можливістю зміни їх довжини в межах 0-200 см, а підтримувачі для робочих органів виконані з мож 2 (19) 1 3 34293 4 ням блоків виділення екстремуму, пороговим блоком, другим модулятором і доповнюючим комутуючим датчиком, причому вихід де тектора через доповнюючий комутуючий датчик зв'язаний із входом блока виділення екстремуму, вихід детектора також зв'язаний з додатковим входом порогового блока через той же додатковий комутуючий датчик, керуючий вхід якого підключений до другого електрода діода, а вихід другого модулятора зв’язаний з першим електродом діода. 8. Універсальна установка за пп. 1-7, яка відрізняється тим, що між електродами і загальним екраном розміщені діелектричні прокладки, причому кожен із електродів і відповідна йому діелектрична прокладка виконані гнучкими, а загальний екран, діелектричні прокладки виконані у вигляді стрічок. 9. Універсальна установка за пп. 1-8, яка відрізняється тим, що електроди виконані шляхом нанесення струмопровідної фарби або покриті еластичним вологонепроникним матеріалом, а загальний екран виконаний нанесенням струмопровідної фарби або еластичного водонепроникного матеріалу. 10. Універсальна установка за пп. 1-9, яка відрізняється тим, що електроди змонтовані на вузлі кріплення до сільськогосподарської машини, обладнаної елементами для фіксації в заданому місці машини, та встановлені паралельно на обернених одна до одної сторонах П-несучого кронштейна з можливістю зміни відстані між ними в межах від о до 150 см, з можливістю регулювання кута між ними в межах від 0 до 1800. Корисна модель відноситься до сільськогосподарського машинобудування, зокрема для дослідження технологічних процесів в рослинництві під час обробітку ґрунту, захисту культурних рослин, кущів та виноградників від бур’янів, шкідників та хвороб. Відомі пристосування Козаченко О.В., Сичов І.П. та ін. Практикум з технічної експлуатації сільськогосподарської техніки: [Монографія/Козаченко О.В., І.П. Сичов та ін.]; За ред.. О.В. Козаченко. Харків: ХДТУСГ: Торнадо, 2001. - 374с. Недоліками яких є відсутність забезпечення проведення досліджень робочих органів, агрегатів, машин і обладнання та їх технологічних характеристик в лабораторних та напіввиробничих умовах без прив’язки до сезонності. В якості найближчого аналога вибрано пристосування „Стенд для прискорених усталених випробувань несучої системи тракторного причепа ЗПТС-12” [рис.72, стор.147 - Погорелый Л.В. Инженерные методы испытания сельскохозяйственных машин. - К.: Техніка, 1981. - 176с, ил. - Библиогр.: с.171-174]. Недоліками якого є неможливість виконання робіт в автоматичному режимі з оперативним збиранням, обробкою, аналізом, показом, зберіганням інформації і керуванням процесів дослідження; підвищення достовірності контролю. Пристосування складається з рами, силової підлоги, редуктора, інертного навантажувача, лазера, шатуна. Конструктивне рішення пристосування не дозволяє практично якісно дослідити технологічні процеси, в рослинництві, зокрема під час обробітку ґрунту, захисту культурних рослин, кущів та виноградників від бур’янів, шкідників та хвороб, не забезпечує проведення досліджень робочих органів, агрегатів, машин і обладнання та їх те хнологічних характеристик в лабораторних та напіввиробничих умовах без прив’язки до сезонності виконання робіт, не дає можливості оперативно в автоматичному режимі збирати, обробляти, аналізувати, показувати, зберігати інформацію та керувати дослідженнями технологічних процесів; підвищення достовірності контролю. Мета корисної моделі - забезпечення прове дення досліджень робочих органів, агрегатів, машин і обладнання та їх технологічних характеристик в лабораторних та напіввиробничих умовах без прив’язки до сезонності; виконання робіт в автоматичному режимі з оперативним збиранням, обробкою, аналізом, показом, зберіганням інформації та керуванням процесів дослідження; підвищення достовірності контролю. Поставлене завдання досягається завдяки тому, що універсальна установка складається з рами-основи до якої жорстко з можливістю регулювання довжини прикріплено кутозмінювачі, які жорстко з’єднані із рамою до якої жорстко, з можливістю зміни кроку N прикріплено стояки, які з’єднані із підтримуючими котками, що мають можливість обертатися навколо своєї вісі, причому геометрична форма деяких з них виконана таким чином, щоб при необхідності вони створювали коливання у вертикальній та горизонтальній площинах з частотою 0-100Гц. Підтримуючі котки з’єднані з полотном, яке натягується натяжним котком і приводяться в рух обертанням електричного двигуна, що має регульовану частоту обертання. Через пас (ланцюг) обертання від електричного двигуна передається на проміжний рушій та додатковий пас (ланцюг). Додатковий пас (ланцюг) передає обертання на натяжний коток, який контактує із полотном, яке контактує із підтримуючими котками. Проміжний рушій, обертаючись, контактує із ґрунтовим каналом, рухаючи його поступально. В ґрунтовому каналі знаходиться грунт або субстрат (вермікуліт, перліт, косове волокно, керамзит), в якому розташовано робочі органи та «імітовані» або природного походження рослини. Робочі органи жорстко з’єднані із стояками, які жорстко з’єднані із підтримувачем, що має можливість переміщуватись у горизонтальній площині і має регульовану довжину в межах 0-200см. Підтримувач жорстко з’єднаний із поперечинами на яких закріплено мірильний інструмент. Поперечини жорстко з’єднані із боковими тримачами, які мають можливість регулювання по висоті в межах 0-200см. До бокових тримачів жорстко прикріплено пантографи, які жорстко з’єднані з маркерами, що мають 5 34293 можливість регулювання по довжині і висоті. При переміщенні ґрунтового каналу маркери відмічають в ґрунті борозни (умовні вісі рядків) із заданою шириною або напрямні щілини із заданою траєкторією. Із підтримувачем жорстко з можливістю регулювання положення вздовж, впоперек, по горизонталі, вертикалі та висоті з’єднано форсунку (розпилювач), яка (який) жорстко приєднана (-ний) до рукава по якому подається робоча рідина під тиском з ємності насосом. До підтримувача хомутом жорстко приєднано рукав, який жорстко з’єднаний із регулятором тиску та сенсором контролю витрати робочої рідини. Електричний двигун, обертаючись, приводить в рух пас (ланцюг), який обертає проміжний рушій, що переміщує ґр унтовий канал з ґрунтом або субстратом (вермікулітом, перлітом, косовим волокном керамзитом) в бік додаткових підтримуючих котків. Переміщення ґрунтового каналу обмежується акумулюючим пристроєм, який складається з контактної пластини, акумулятора ударних навантажень (пружини, гумової чи силіконової «подушки») та електричного кінцевого вимикача, який з’єднаний із електричним двигуном. Електричний двигун при розмиканні контактів електричного кінцевого вимикача зупиняється. Грунтовий канал переміщується із регульованою поступальною швидкістю Du в межах 0,1-25м/с, що фіксується сенсором контролю швидкості переміщення (руху), назустріч робочим органам, що контактують з ґрунтом або субстратом (вермікулітом, перлітом, косовим волокном, керамзитом). Жорстке з’єднання підтримувача з поперечинами і боковими тримачами дає можливість переміщувати та фіксува ти робочі органи в повздовжньо-вертикальній та поперечно вертикальній площинах. При переміщенні ґрунтового каналу, в якому знаходиться грунт або субстрат (вермікуліт, перліт, косове волокно, керамзит), який контактує з робочими органами, проводять дослідження технологічних процесів, відхилення та параметри, які фіксуються сенсором швидкості переміщення (руху), сенсором частоти обертання, сенсором тиску, сенсором опору переміщенню, сенсором витрати робочої рідини, сенсором відхилення від прямолінійності руху, сенсором відхилення по висоті в повздовжній та поперечній площинах, сенсором густоти (щільності) рослин. Отримана сенсорами інформація передається для обробки, аналізу, показу та зберігання на пристрій-модулятор «ПОС-1», який в автоматичному режимі, може оперативно збирати, обробляти, аналізувати, показувати, зберігати інформацію та керувати дослідженнями технологічного процесу. Пристрій-модулятор «ПОС-1» складається із блоку збирання даних від сенсорів пристрою для контролю відносного переміщення рослинного матеріалу, програмного блоку, блоку виводу ін формації на монітор, блоку формування керуючих сигналів, блоку керування, комплекту виконавчих механізмів, які керують механізмами зміни параметрів, зокрема пантографами, тримачами, кутозмінювачами. Пристрій-модулятор «ПОС-1» для контролю відносного переміщення, рослинного матеріалу містить генератор, виконаний, наприклад, на мік 6 росхемі, вихід якого підключений до електродів сенсорів. Між другим електродом і екраном діелектричних прокладок включено вхід підсилювача, виконаного, наприклад, на диференціальному підсилювачі. Електроди і виконані, наприклад, у вигляді фольги і встановлені на діелектричних прокладках, які закріплені на екрані. Електрод з’єднаний через ланцюг компенсації потенціалу на електроді, який має резистор в якості елемента зворотнього зв’язку і з ви ходом підсилювача, який також підключений до входу детектора, який складається, наприклад, з діода і конденсатора. Така схема включення генератора, підсилювача і його зворотного зв’язку послаблює вплив екрану, підвищує чуттєвість і дозволяє змінювати геометрію чуттєвих елементів при монтажі і в процесі роботи без переналадки електронної схеми. Вихід детектора зв’язаний із входом екстрематора, який складається, наприклад, із диференціюючого ланцюга і операційного підсилювача, а вхід екстрематора з’єднаний із входом порогового блоку, зібраного, наприклад на операційному підсилювачі, вихід якого підключений до входу формувача імпульсів, виконаного, наприклад, на тригері. Вихід формувача пов’язаний із входом імпульсного модулятора, виконаного, наприклад, на транзисторі чи мікросхемі, що включені в лінію живлення. На пульті послідовно в лінію живлення включений, навантажуючий елемент в вигляді, наприклад резистора. До навантажуючого елемента підключений вхідний ланцюг бортового однокрестального (з багатоядерним процесором) комп’ютера, на якому виконано програмний блок, блоку виводу інформації на монітор, блок формування керуючих сигналів, блок керування, комплект виконавчих механізмів. Між входом контролю режиму роботи генератора і лінії живлення або навантажуючим елементом в вигляді резистора для розв’язки включений діод і конденсатори. Перша обкладка конденсаторів заземлена, тобто зв’язана з екраном і рамою установки. Резистор підключений до першого електроду діода, другий електрод якого зв’язаний з другим електродом конденсаторів і входом керування режимів роботи генератора. Вихід комп’ютера пов’язаний з задаючим входом стабілізатора через модулятор. Лінія живлення виконана дво- чи трипровідною, але доцільніше є використання одного ізольованого проводу і рами установки. Крім того, доцільно пов’язати вихід детектора із входом екстрематора і додатковим входом порогового блоку через додатковий комутуючий датчик, вхід керування якого підключений до другого електроду діода. В тому випадку, якщо необхідно додатково підвищити надійність контролю, наприклад, при великих забрудненнях, прилад обладнано додатковими К генераторами, вихід кожного із яких підключений паралельно виходу основного генератора, а вхід керування режимом роботи кожного додаткового генератора безпосередньо відповідного комутуючого сенсора зв’язаний з другим електродом діода, причому ці сенсори зв’язані між собою. 7 34293 При дослідженні технологічних процесів за допомогою пристрою-модулятора «ПОС-1» можна моделювати та фіксувати наступні відхилення та параметри: Dс - моделювання відхилення ширини міжряддя; Dl - моделювання відхилення густо ти посіву; Dh - моделювання відхилення по висоті рослин; Dе - моделювання відхилення по глибині обробітку; Ds - моделювання відхилення ширини захисної (навколо рядкової) зони рядка; Dh1 - моделювання відхилення висоти рослин одна відносно одної; Da - моделювання відхилення геометричних розмірів плями розпилювання; Dk моделювання відхилення висоти розпилювання відносно рослин; DН - моделювання відхилення висоти розпилювання відносно ґрунту; Dr - моделювання відхилення ущільнення ґрунту колесом, робочими органами; Dw - моделювання відхилення частоти обертання колеса, робочого органу; Dn моделювання відхилення щільності встановлення робочих органів; Dw - моделювання відхилення ширини захвату; Dо - моделювання відхилення зони перекриття; Du - моделювання відхилення швидкості руху; Dr - моделювання відхилення сили тиску на грун т, на робочий орган, колесо; Df моделювання сили опору ґрунту; Dd - моделювання структури ґр унту; Dkr - моделювання відхилення діаметру крони рослини; Dh2 - моделювання відхилення глибини залягання кореневища, коренеплоду; D - моделювання відхилення технологічної колії; Dа - моделювання відхилення рослини від вісі рядка; Db - моделювання відхилення робочого органу від вісі рядка (моделювання прямолінійності руху); Dm - моделювання відхилення відстані між рослинами в суміжних рядках. Генератор, що працює на частоті в діапазоні, наприклад, 1кГц - 550Мгц, порушує електромагнітне поле між електродами, а також екраном. В результаті між електродами протікає струм. Цей струм посилюється підсилювачем до такого рівня, що стр ум через резистор встановлюється, наприклад, близьким до струму між електродами (з точністю близько 15%). Але посилений струм має протилежну фазу. Це досягається тим, що вхідний струм підсилювача встановлюється хоч би на порядок менше струму між електродами, що забезпечується вибором величини вхідного опору підсилювача. Якщо струм між електродами і струм в ланцюзі зворотного зв’язку, тобто стр ум компенсації потенціалу на електроді, що протікає через резистор, близькі по величині, то потенціал електроду близький до потенціалу екрану. У ідеальному випадку вказані потенціали рівні. За рахунок цього різко знижуються вимоги до величини місткості між електродом і екраном. За рахунок цього досягається зменшення цього зазору між ними, наприклад до 0,05-15мм. Різко знижуються вимоги до якості діелектрика, змінам зазору між електродом і екраном при виготовленні. При переміщенні предметів (насіння, корнебульбоплодів і ін.) або проходженні рослин між електродами змінюється величина струму між ними і вихідний сигнал підсилювача. Після детектування детектором одержаний сигнал поступає на 8 вхід екстрематора, який виділяє момент екстремуму імпульсу від контрольованого предмету. Одержаний імпульс через пороговий блок поступає у формувач, на виході якого виробляється імпульс, що поступає на вхід імпульсного модулятора, який, зокрема, на час проходження імпульсу закорочує лінію живлення через свій транзистор. Вплив цього процесу на режими описаних елементів схеми виключається за рахунок діода і конденсаторів. Одержаний імпульс знімається з резистором на пульті і поступає на вхід бортового однокристального (з багатоядерним процесором) комп’ютера в якому використовується для контролю факту попадання в зону між електродами рослин, насіння, корне- бульбоплодів і ін. шляхом індикації на моніторі. Резистор підключений до бортової мережі машини через блок живлення, що містить стабілізатор. Під час роботи або на зупинках машини по командах з комп’ютера модулятор через задаючий ланцюг стабілізатора змінює гармонійно, пилкоподібний або що ступінчасто живить напругу. Це приводить до зміни електромагнітного поля, що порушується високочастотним генератором і сигналу на виході підсилювача. Комп’ютер виділяє інформацію попадання в зону між електродами предметів по відгуку на модуляцію живлячої напруги модулятором, про частковість за часом між подачею команди в модулятор і отриманням у відповідь сигналу. Перевірка стану електродів дозволяє підвищити надійність їх роботи, а перевірка стану пристрою надійність контролю. Виконаний заявником аналіз рівня техніки, який включає пошук по патентним і науковотехнічним джерелам інформації, виявлення джерел, які містять відомості про аналоги заявленої корисної моделі, дозволив встановити, що заявник не виявив аналог, який характеризується ознаками, ідентичними всім істотним ознакам заявленого технічного рішення. Визначення із переліку виявлених аналогів прототипу як найбільш близького до істотних ознак аналога дозволило виявити сукупність істотних по відношенню до передбаченого технічного результату відмінних ознак в заявленому рішенні, яке виявлено в формулі корисної моделі. Значить, заявлена корисна модель відповідає умові «новизна». Запропонована корисна модель - універсальна установка для дослідження технологічних процесів в рослинництві пояснюється кресленнями, які приведені нижче: Фіг.1 загальний вигляд універсальної установки для дослідження технологічних процесів в рослинництві; Фіг.2 універсальна установка для дослідження технологічних процесів в рослинництві, вид зверху; Фіг.3 загальний вигляд пристрою-модулятора «ПОС-1»; Фіг.4 блок схема пристрою для контролю відносного переміщення рослинного матеріалу. Універсальна установка складається з рамиоснови 1 до якої жорстко з можливістю регулювання довжини прикріплено кутозмінювачі 2, які жорс 9 34293 тко з’єднані із рамою 3 до якої жорстко, з можливістю зміни кроку N прикріплено стояки 4, які з’єднані із підтримуючими котками 5, що мають можливість обертатися навколо своєї вісі, причому геометрична форма деяких з них виконана таким чином, щоб при необхідності вони створювали коливання у вертикальній та горизонтальній площинах з частотою 0-100Гц. Підтримуючі котки 5 з’єднані з полотном 6, яке натягується натяжним котком 7 і приводяться в рух обертанням електричного двигуна 8, що має регульовану частоту обертання. Через пас (ланцюг) 9 обертання від електричного двигуна 8 передається на проміжний рушій 10 та додатковий пас (ланцюг) 11. Додатковий пас (ланцюг) 11 передає обертання на натяжний коток 7, який контактує із полотном 6, яке контактує із підтримуючими котками 5. Проміжний рушій 10, обертаючись, контактує із ґрунтовим каналом 12, рухаючи його поступально. В ґрунтовому каналі 12 знаходиться грунт або субстрат (вермікуліт, перліт, косове волокно, керамзит) 13, в якому розташовано робочі органи 14 та «імітовані» або природного походження рослини 15. Робочі органи 14 жорстко з’єднані із стояками 16, які жорстко з’єднані із підтримувачем 17, що має можливість переміщуватись у горизонтальній площині і має регульовану довжину в межах 0200см. Підтримувач 17 жорстко з’єднаний із поперечинами 18 на яких закріплено мірильний інструмент 19. Поперечини 18 жорстко з’єднані із боковими тримачами 20, які мають можливість регулювання по висоті в межах 0-200см. До бокових тримачів 20 жорстко прикріплено пантографи 21, які жорстко з’єднані з маркерами 22, що мають можливість регулювання по довжині і висоті. При переміщенні ґрунтового каналу 12 маркери 22 відмічають в ґрунті 13 борозни (умовні вісі рядків) із заданою шириною або напрямні щілини із заданою траєкторією. Із підтримувачем 17 жорстко з можливістю регулювання положення вздовж, впоперек, по горизонталі, вертикалі та висоті з’єднано форсунку (розпилювач) 23, яка (який) жорстко приєднана (-ний) до рукава 24 по якому подається робоча рідина 25 під тиском з ємності 26 насосом 27. До підтримувача 17 хомутом 28 жорстко приєднано рукав 24, який жорстко з’єднаний із регулятором тиску 29 та сенсором 30 контролю витрати робочої рідини 25. Електричний двигун 8, обертаючись, приводить в рух пас (ланцюг) 9, який обертає проміжний рушій 10, що переміщує ґр унтовий канал 12 з ґрунтом або субстратом (вермікулітом, перлітом, косовим волокном керамзитом) 13 в бік додаткових підтримуючих котків 31. Переміщення ґрунтового каналу 12 обмежується акумулюючим пристроєм, який складається з контактної пластини 32, акумулятора ударних навантажень (пружини, гумової чи силіконової «подушки») 33 та електричного кінцевого вимикача 34, який з’єднаний із електричним двигуном 8. Електричний двигун 8 при розмиканні контактів електричного кінцевого вимикача 34 зупиняється. Ґрунтовий канал 12 переміщується із регульованою поступальною швидкістю Du в межах 0,1-25м/с, що фіксується сенсором контролю швидкості переміщення (руху) 35, назустріч робо 10 чим органам 14, що контактують з ґрунтом або субстратом (вермікулітом, перлітом, косовим волокном, керамзитом) 13. Жорстке з’єднання підтримувача 17 з поперечинами 18 і боковими тримачами 20 дає можливість переміщувати та фіксувати робочі органи 14 в повздовжньовертикальній та поперечно вертикальній площинах. При переміщенні ґрунтового каналу 12, в якому знаходиться грунт або субстрат (вермікуліт, перліт, косове волокно, керамзит) 13, який контактує з робочими органами 14, проводять дослідження технологічних процесів, відхилення та параметри, які фіксуються сенсором швидкості переміщення (руху) 35, сенсором частоти обертання 36, сенсором тиску 37, сенсором опору переміщенню 38, сенсором витрати робочої рідини 30, сенсором відхилення від прямолінійності руху 39, сенсором відхилення по висоті в повздовжній та поперечній площинах 40, сенсором густо ти (щільності) 41 рослин. Отримана сенсорами 30, 35, 36, 37, 38, 39, 40, 41 інформація передається для обробки, аналізу, показу та зберігання на пристрій-модулятор «ПОС-1» 42, який в автоматичному режимі, може оперативно збирати, обробляти, аналізувати, показувати, зберігати інформацію та керувати дослідженнями технологічного процесу. Пристрій-модулятор «ПОС-1» 42 складається із блоку збирання даних 43 від сенсорів 30, 35, 36, 37, 38, 39, 40, 41, пристрою для контролю відносного переміщення рослинного матеріалу 44, програмного блоку 45, блоку виводу інформації 46 на монітор 47, блоку формування керуючих сигналів 48, блоку керування 49, комплекту виконавчих механізмів 50, які керують механізмами зміни параметрів, зокрема пантографами 21, тримачами 20, кутозмінювачами 2. Пристрій-модулятор «ПОС-1» 42 для контролю відносного переміщення, рослинного матеріалу 44 містить генератор 51, виконаний, наприклад, на мікросхемі, вихід якого підключений до електродів 52 сенсорів 30, 35, 36, 37, 38, 39, 40, 41. Між другим електродом 53 і екраном 54 діелектричних прокладок включено вхід підсилювача 56, виконаного, наприклад, на диференціальному підсилювачі. Електроди 52 і 53 виконані, наприклад, у вигляді фольги і встановлені на діелектричних прокладках 55, які закріплені на екрані 54. Електрод 55 з’єднаний через ланцюг компенсації потенціалу на електроді 53, який має резистор 57 в якості елемента зворотнього зв’язку і з виходом підсилювача 56, який також підключений до входу детектора 58, який складається, наприклад, з діода 65 і конденсаторів 66. Така схема включення генератора 51, підсилювача 56 і його зворотного зв’язку послаблює вплив екрану 54, підвищує чуттєвість і дозволяє змінювати геометрію чуттєвих елементів при монтажі і в процесі роботи без переналадки електронної схеми. Вихід детектора 58 зв’язаний із входом екстрематора 59, який складається, наприклад, із диференціюючого ланцюга і операційного підсилювача, а вхід екстрематора 59 з’єднаний із входом порогового блоку 60, зібраного, наприклад на операційному підсилювачі, вихід якого підключений до входу формувача імпульсів 61, виконаного, наприклад, на тригері. Вихід фор 11 34293 мувача 61 пов’язаний із входом імпульсного модулятора 62, виконаного, наприклад, на транзисторі чи мікросхемі, що включені в лінію живлення 63. На пульті послідовно в лінію живлення 63 включений, навантажуючий елемент 64 в вигляді, наприклад резистора. До навантажуючого елемента 64 підключений вхідний ланцюг бортового однокрестального (з багатоядерним процесором) комп’ютера 42, на якому виконано програмний блок 45, блоку виводу інформації 46 на монітор 47, блок формування керуючих сигналів 48, блок керування 49, комплект виконавчих механізмів 50. Між входом контролю режиму роботи генератора 51 і лінії живлення 53 або навантажуючим елементом в вигляді 60 резистора 54 для розв’язки включений діод 65 і конденсатори 66. Перша обкладка конденсаторів 66 заземлена, тобто зв’язана з екраном і рамою 1 установки. Резистор 64 підключений до першого електроду діода 65, другий електрод якого зв’язаний з другим електродом конденсаторів 66 і входом керування режимів роботи генератора 51. Вихід комп’ютера 42 пов’язаний з задаючим входом стабілізатора 67 через модулятор 68. Лінія живлення 63 виконана дво- чи трипровідною, але доцільніше є використання одного ізольованого проводу і рами установки. Крім того, доцільно пов’язати вихід детектора 58 із входом екстрематора 59 і додатковим входом порогового блоку 60 через додатковий комутуючий датчик, вхід керування якого підключений до другого електроду діода 65. В тому випадку, якщо необхідно додатково підвищити надійність контролю, наприклад, при великих забрудненнях, прилад обладнано додатковими К генераторами, вихід кожного із яких підключений паралельно виходу основного генератора 51, а вхід керування режимом роботи кожного додаткового генератора безпосередньо відповідного комутуючого сенсора зв’язаний з другим електродом діода, причому ці сенсори зв’язані між собою. При дослідженні технологічних процесів за допомогою пристрою-модулятора «ПОС-1» 42 можна моделювати та фіксувати наступні відхилення та параметри: Dс - моделювання відхилення ширини міжряддя; Dl - моделювання відхилення густо ти посіву; Dh - моделювання відхилення по висоті рослин; Dе - моделювання відхилення по глибині обробітку; Ds - моделювання відхилення ширини захисної (навколо рядкової) зони рядка; Dh1 - моделювання відхилення висоти рослин одна відносно одної; Da - моделювання відхилення геометричних розмірів плями розпилювання; Dk моделювання відхилення висоти розпилювання відносно рослин; DН - моделювання відхилення висоти розпилювання відносно ґрунту; Dr - моделювання відхилення ущільнення ґрунту колесом, робочими органами; Dw - моделювання відхилення частоти обертання колеса, робочого органу; Dn моделювання відхилення щільності встановлення робочих органів; Dw - моделювання відхилення ширини захвату; Dо - моделювання відхилення 12 зони перекриття; Du - моделювання відхилення швидкості руху; Dr - моделювання відхилення сили тиску на грун т, на робочий орган, колесо; Df моделювання сили опору ґрунту; Dd - моделювання структури ґр унту; Dkr - моделювання відхилення діаметру крони рослини; Dh2 - моделювання відхилення глибини залягання кореневища, коренеплоду; D - моделювання відхилення технологічної колії; Dа - моделювання відхилення рослини від вісі рядка; Db - моделювання відхилення робочого органу від вісі рядка (моделювання прямолінійності руху); Dm - моделювання відхилення відстані між рослинами в суміжних рядках. Генератор 51, що працює на частоті в діапазоні, наприклад, 1кГц - 550Мгц, порушує електромагнітне поле між електродами 52 і 53, а також екраном 54. В результаті між електродами 52 і 53 протікає струм. Цей струм посилюється підсилювачем 56 до такого рівня, що стр ум через резистор 57 встановлюється, наприклад, близьким до струму між електродами 52 і 53 (з точністю близько 15%). Але посилений струм має протилежну фазу. Це досягається тим, що вхідний струм підсилювача встановлюється хоч би на порядок менше струму між електродами 52 і 53, що забезпечується вибором величини вхідного опору підсилювача 56. Якщо струм між електродами 52 і 53 і струм в ланцюзі зворотного зв’язку, тобто струм компенсації потенціалу на електроді 53, що протікає через резистор 57, близькі по величині, то потенціал електроду 53 близький до потенціалу екрану 54. У ідеальному випадку вказані потенціали рівні. За рахунок цього різко знижуються вимоги до величини місткості між електродом 53 і екраном 54. За рахунок цього досягається зменшення цього зазору між ними, наприклад до 0,05-15мм. Різко знижуються вимоги до якості діелектрика, змінам зазору між електродом 53 і екраном 54 при виготовленні. При переміщенні предметів (насіння, корнебульбоплодів і ін.) або проходженні рослин між електродами 52 і 53 змінюється величина струму між ними і вихідний сигнал підсилювача 56. Після детектування детектором 58 одержаний сигнал поступає на вхід екстрематора 59, який виділяє момент екстремуму імпульсу від контрольованого предмету. Одержаний імпульс через пороговий блок 60 поступає у формувач 61, на виході якого виробляється імпульс, що поступає на вхід імпульсного модулятора 62, який, зокрема, на час проходження імпульсу закорочує лінію живлення 63 через свій транзистор. Вплив цього процесу на режими описаних елементів схеми виключається за рахунок діода 65 і конденсаторів 66. Одержаний імпульс знімається з резистором. 64 на пульті і поступає на вхід бортового однокристального (з багатоядерним процесором) комп’ютера 65 в якому використовується для контролю факту попадання в зону між електродами 52 і 53 рослин, насіння, корне- бульбоплодів і ін. шляхом індикації на моніторі 47. Резистор 64 підключений до бортової мережі машини через блок живлення, що містить стабілі 13 34293 затор 68. Під час роботи або на зупинках машини по командах з комп’ютера 42 модулятор 67 через задаючий ланцюг стабілізатора 68 змінює гармонійно, пилкоподібний або що ступінчасто живить напругу. Це приводить до зміни електромагнітного поля, що порушується високочастотним генератором 51 і сигналу на виході підсилювача 56. Комп’ютер 42 виділяє інформацію попадання в зону між електродами 52 і 53 предметів по відгуку на модуляцію живлячої напруги модулятором 67, про частковість за часом між подачею команди в модулятор 67 і отриманням у відповідь сигналу. Перевірка стану електродів 52 і 53 дозволяє під 14 вищити надійність їх роботи, а перевірка стану пристрою надійність контролю. Заявлене технічне рішення може бути використане в сільськогосподарському машинобудуванні, зокрема для дослідження технологічних процесів в рослинництві під час обробітку ґрунту, захисту культурних рослин, кущів та виноградників від бур’янів, шкідників та хвороб, воно описане в матеріалах заявки повністю, що дає можливість широкого використання його в те хнології вирощування сільськогосподарських культур. Таким чином, запропоноване рішення задовольняє критерії корисної моделі «промислова придатність». 15 Комп’ютерна в ерстка А. Крулевський 34293 Підписне 16 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMultipurpose unit for studying technological processes in plant production
Автори англійськоюSlynko Oleh Pavlovych, Burlak Oleksii Anatoliiovych, Panchenko Svitlana Mykolaivna, Prasolov Yevhenii Yakovych, Slynko Yuliia Leonidivna
Назва патенту російськоюУниверсальная установка для исследования технологических процессов в растениеводстве
Автори російськоюСлинько Олег Павлович, Бурлак Алексей Анатольевич, Панченко Светлана Николаевна, Прасолов Евгений Яковлевич, Слинько Юлия Леонидовна
МПК / Мітки
МПК: A01B 41/00, A01B 39/00
Мітки: процесів, установка, універсальна, дослідження, технологічних, рослинництві
Код посилання
<a href="https://ua.patents.su/8-34293-universalna-ustanovka-dlya-doslidzhennya-tekhnologichnikh-procesiv-v-roslinnictvi.html" target="_blank" rel="follow" title="База патентів України">Універсальна установка для дослідження технологічних процесів в рослинництві</a>
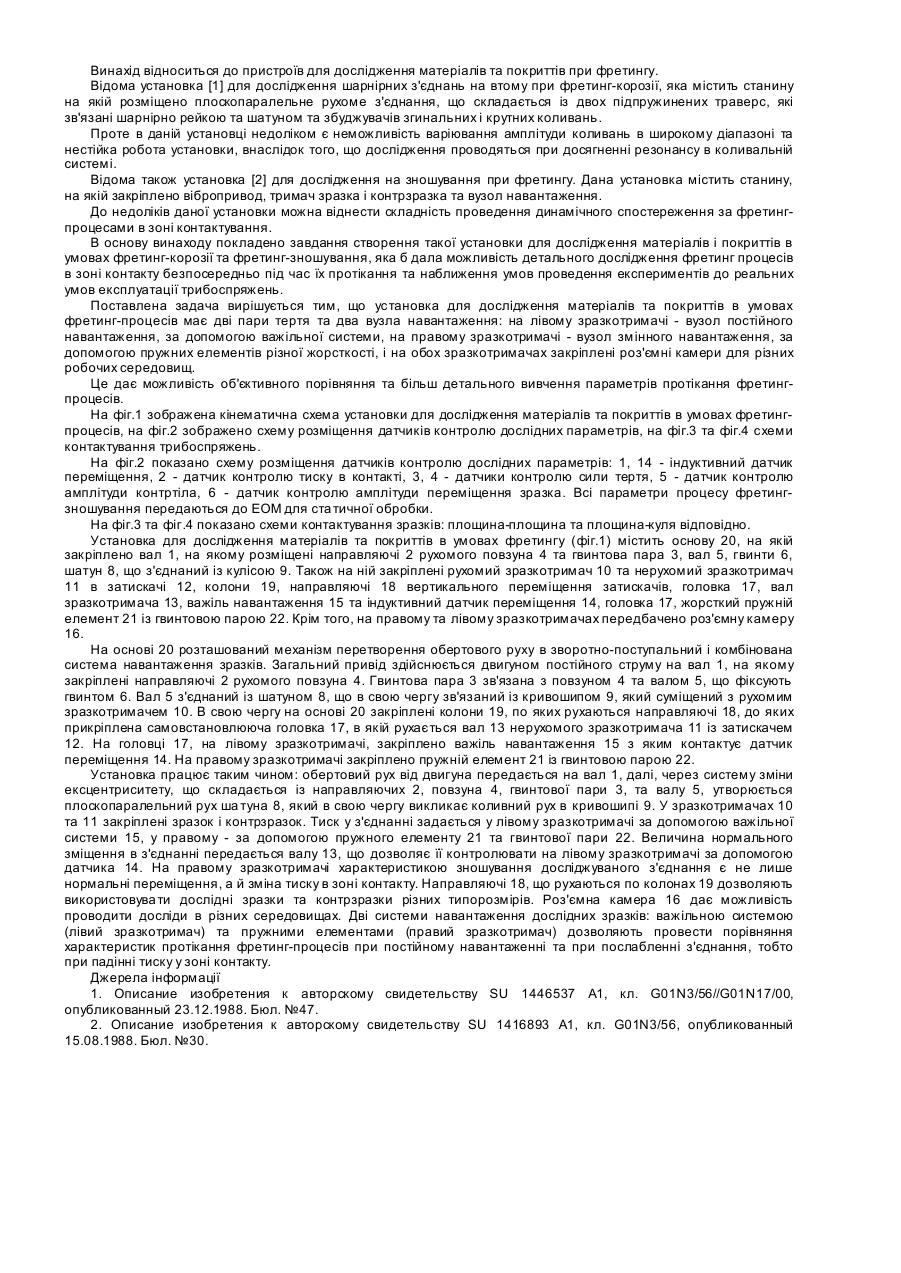
Установка для дослідження матеріалів та покриттів в умовах фретинг-процесів
Номер патенту: 69559
Опубліковано: 15.09.2004
Автори: Шалапко Юрій Іванович, Гончар Віталій Віталійович, Каплун Віталій Григорович, Павлик Василь Олексійович
МПК: G01N 3/00
Мітки: покриттів, умовах, дослідження, установка, фретинг-процесів, матеріалів
Формула / Реферат:
Установка для дослідження матеріалів та покриттів в умовах фретинг-процесів, яка містить станину, на якій закріплено вібропривід, тримач зразка і контрзразка та вузол навантаження, яка відрізняється тим, що має дві пари тертя та два вузли навантаження: на лівому тримачі зразка - вузол постійного навантаження за допомогою важільної системи, на правому тримачі зразка - вузол змінного навантаження за допомогою пружних елементів різної...
Установка для дослідження процесів впливу електричних розрядів на метали і сплави в контрольованій атмосфері
Номер патенту: 62685
Опубліковано: 15.12.2003
Автори: Буравлев Юрій Матвійович, Демянюк Оксана Олегівна, Іваніцин Микола Петрович, Чернявська Наталія Вікторівна, Милославський Олександр Григорович, Ткаченко Микола Степанович
МПК: G01J 3/42
Мітки: атмосфери, метали, дослідження, сплави, електричних, установка, процесів, розрядів, контрольований, впливу
Формула / Реферат:
Установка для дослідження процесів впливу електричних розрядів на метали і сплави в контрольованій атмосфері, що включає камеру з електродотримачами, систему підведення від джерела електричного струму, ілюмінатори, проекційний пристрій для точної установки міжелектродного проміжку, штуцери для підведення і відведення газу з камери, вузол для переміщення досліджуваного зразка, освітлювальний консольний пристрій, а також увід для термопари, яка...
Спосіб контролю технологічних процесів
Номер патенту: 17822
Опубліковано: 16.10.2006
Автори: Виноградець Сергій Олександрович, Ткач Олег Іванович, Хаєцький Юрій Броніславович, Коток Валерій Борисович, Вечерік Роман Леонідович, Колодяжний Валерій Васильович, Бантюков Євген Миколайович, Волчков Іван Іванович, Максімов Вячеслав Павлович, Косолапов Сергій Васильович
МПК: G08B 23/00
Мітки: спосіб, процесів, контролю, технологічних
Формула / Реферат:
Спосіб контролю технологічних процесів, що включає періодичне вимірювання значень параметрів технологічного процесу, запам'ятовування й індикацію обмірюваного значення кожного параметра, контроль порушення обмірюваним значенням параметра його граничних уставок, який виконується шляхом порівняння обмірюваного значення кожного параметра з його граничними уставками, видачу відповідного сигналу, якщо обмірюване значення параметра порушило одну з...
Спосіб контролю технологічних процесів
Номер патенту: 83682
Опубліковано: 11.08.2008
Автори: Волчков Іван Іванович, Коток Валерій Борисович, Виноградець Сергій Олександрович, Максімов Вячеслав Павлович, Вечерік Роман Леонідович, Бантюков Євген Миколайович, Колодяжний Валерій Васильович, Хаєцький Юрій Броніславович, Ткач Олег Іванович, Косолапов Сергій Васильович
МПК: G08B 23/00
Мітки: спосіб, процесів, технологічних, контролю
Формула / Реферат:
Спосіб контролю технологічних процесів, що включає періодичний вимір значень параметрів технологічного процесу, запам'ятовування й індикацію обмірюваного значення кожного параметра, контроль порушення обмірюваним значенням параметра його граничних уставок, який виконують шляхом порівняння обмірюваного значення кожного параметра з його граничними уставками, видачу відповідного сигналу, якщо обмірюване значення параметра порушило одну з...
Спосіб контролю технологічних процесів
Номер патенту: 42160
Опубліковано: 15.10.2001
Автори: Сливканич Володимир Семенович, Бантюков Євген Миколайович, Шваченко Ігор Іванович, Олексюк Андрій Володимирович, Мурін Вадим Олександрович, Рибчич Ілля Йосипович, Коток Валерій Борисович, Алексєєнко Сергій Порфирійович
МПК: G08B 23/00
Мітки: технологічних, контролю, процесів, спосіб
Формула / Реферат:
1. Спосіб контролю технологічних процесів, який включає циклічне вимірювання значень параметрів технологічного процесу, запам'ятовування і індикацію виміряного значення кожного параметра, контроль порушення значенням параметра його граничних уставок, що виконується шляхом порівняння виміряного значення кожного параметра з його граничними уставками і видачі відповідного сигналу, якщо виміряне значення параметра порушило хоча б одну граничну...
Попередній патент: Світловий демонстраційний пристрій
Наступний патент: Спосіб оцінки активності фібропластичного процесу у дітей з обструктивними нефропатіями
Випадковий патент: Спосіб виробництва молочно-рослинного напою на чайній основі з сухим молоком