Машина на рейковому ходу для безперервного знімання нерівностей з поверхні рейок залізничного шляху
Формула / Реферат
1. Машина на рельсовом ходу для непрерывного снятия неровностей с поверхности рельсов железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, по меньшей мере одну инструментальную раму, установленную на раме машины между ходовыми тележками с возможностью перестановки по высоте гидроцилиндрами, направляющие суппорты, несущие инструменты для обработки рельсов и смонтированные на инструментальной раме с возможностью перемещения поперек машины при помощи телескопических элементов, а также перемещения по вертикальным направляющим, размещаемым снаружи колеи, и горизонтальным направляющим соответствующими гидроцилиндрами, ролики с горизонтальными осями вращения для направления инструментальной рамы по рельсам, установленные на этой раме, источник энергии и блок управления, связывающий указанные гидроцилиндры с источником энергии, отличающаяся тем, что, с целью повышения точности установки инструментов относительно обрабатываемых рельсов, она снабжена роликами с вертикальными осями вращения для взаимодействия с боковыми поверхностями головок рельсов, дополнительными вертикальными направляющими, дополнительными горизонтальными направляющими и дополнительными гидроцилиндрами, каждый направляющий суппорт смонтирован на отдельной инструментальной раме, размещаемой над соответствующим рельсом пути, и состоит из двух частей, на одной из которых установлены соответствующие вертикальная направляющая и дополнительная вертикальная направляющая, размещаемая внутри колеи, а на второй - соответствующие горизонтальная направляющая и дополнительная горизонтальная направляющая, размещенные с обеих сторон указанных вертикальных направляющих над соответствующим рельсом пути перпендикулярно продольной оси машины, при этом внизу второй части каждого суппорта закреплен инструмент для обработки реяьсов, сверху этой части на одной из указанных горизонтальных направляющих установлен гидроцилиндр ее перемещения, поршень которого жестко закреплен на этой направляющей, указанная одна часть направляющего суппорта связана с гидроцилиндром его перемещения по вертикальным направляющим и соединена с горизонтальной направляющей и дополнительной горизонтальной направляющей второй части суппорта, а ролики с вертикальными осями вращения закреплены на каждой инструментальной раме попарно с обеих сторон инструмента для обработки рельсов.
2. Машина по п. 1, отличающаяся тем, что она снабжена установленными на инструментальных рамах регулируемыми упорами для ограничения перемещения направляющих суппортов в вертикальной и горизонтальной плоскостях.
3. Машина по пп. 1, 2, отличающаяся тем, что, с целью регулирования глубины обработки рельсов, она снабжена смонтированными на инструментальных рамах подвижными от приводов промежуточными пластинами, размещаемыми между указанными упорами и упорными поверхностями направляющих суппортов.
4. Машина по п. 1, отличающаяся тем, что каждая инструментальная рама соединена с рамой машины посредством соответствующего дополнительного гидроцилиндра.
5. Машина по п. 1, отличающаяся тем, что каждая инструментальная рама соединена с рамой машины тягой.
Текст
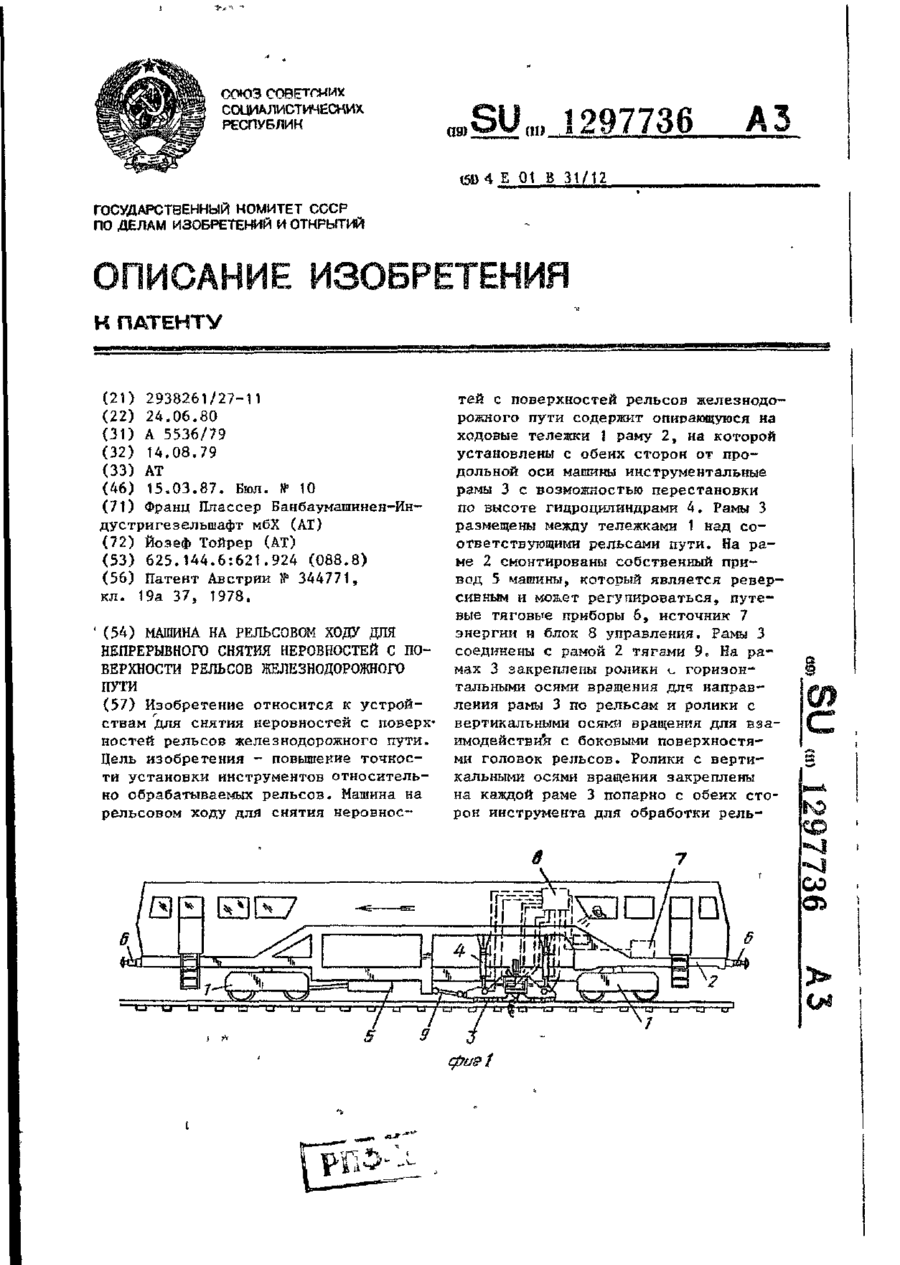
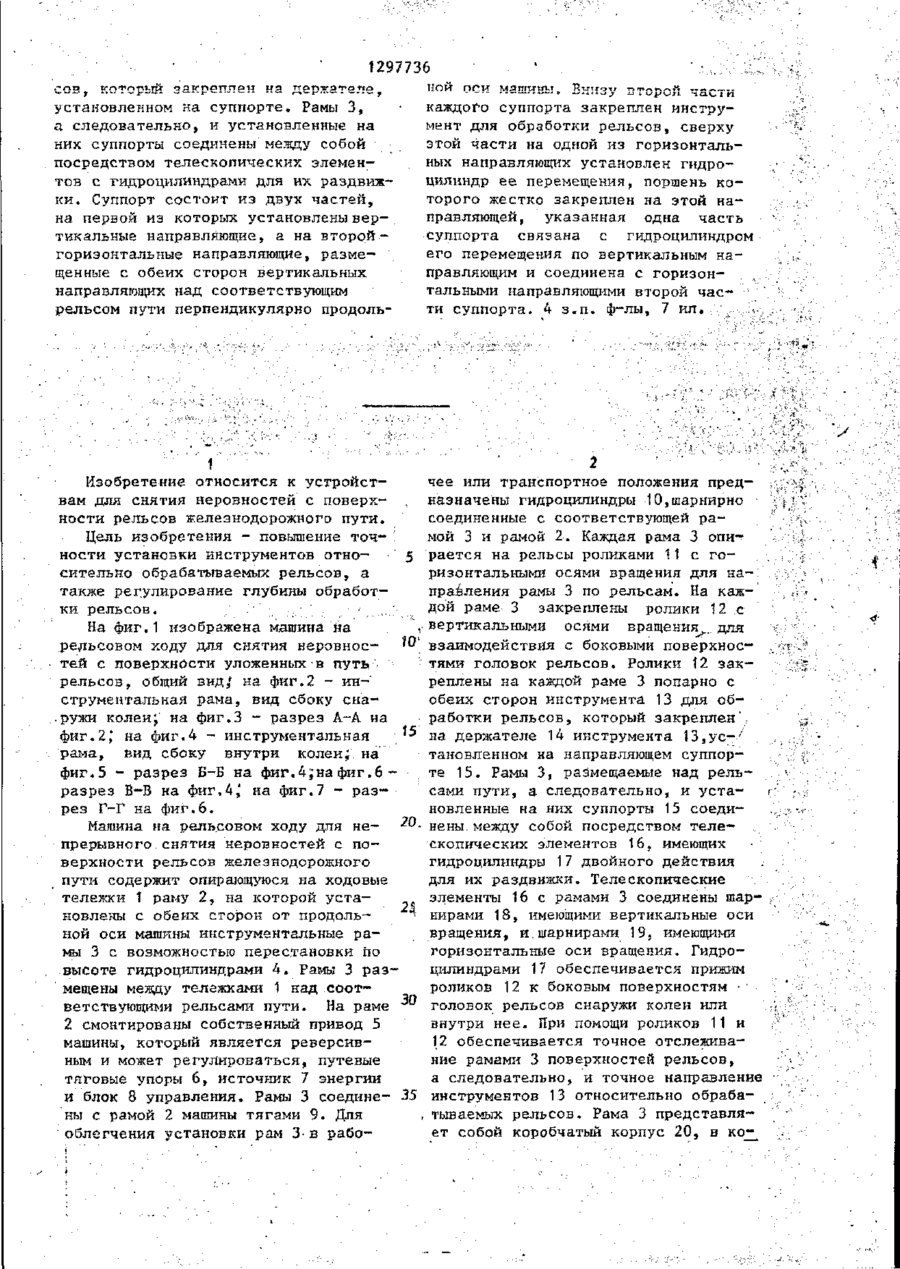
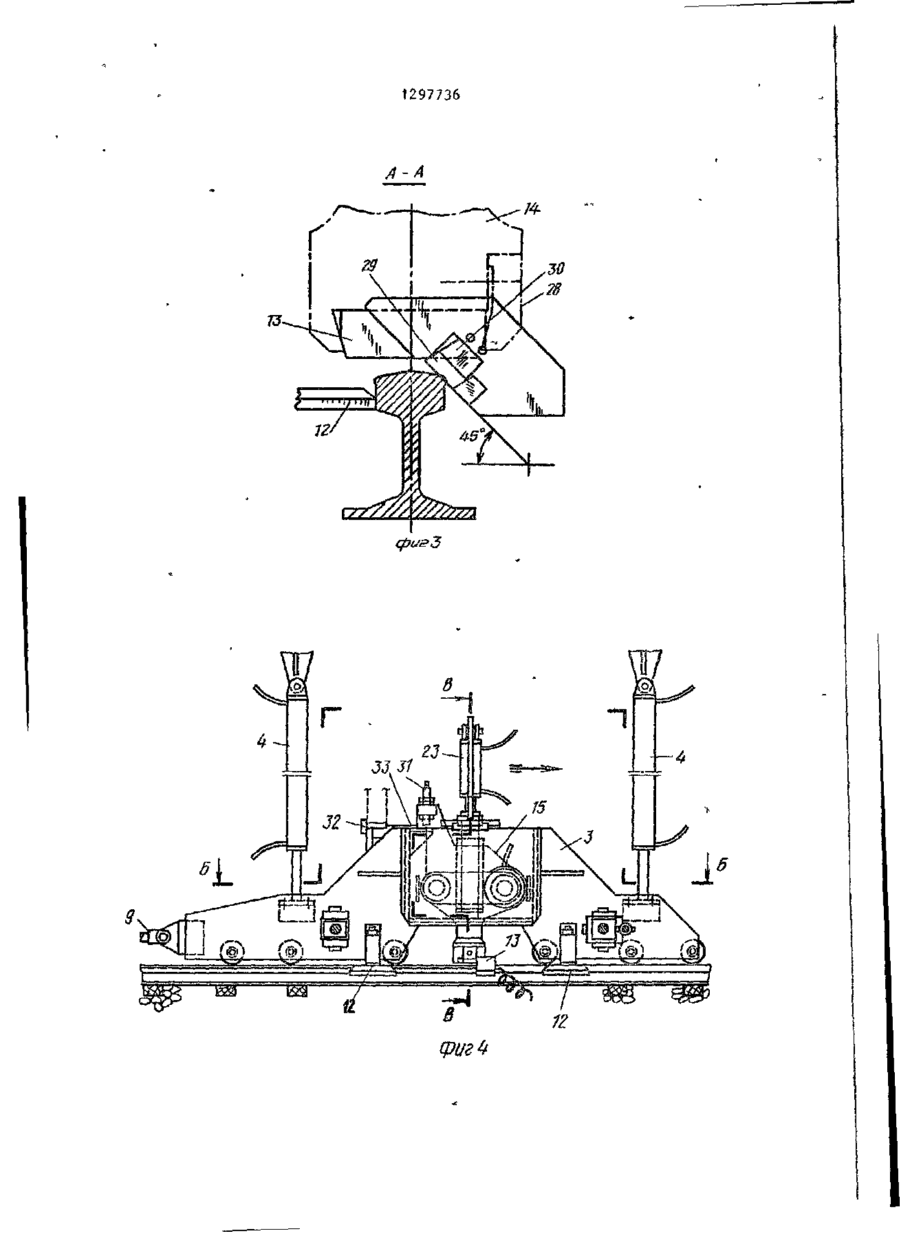
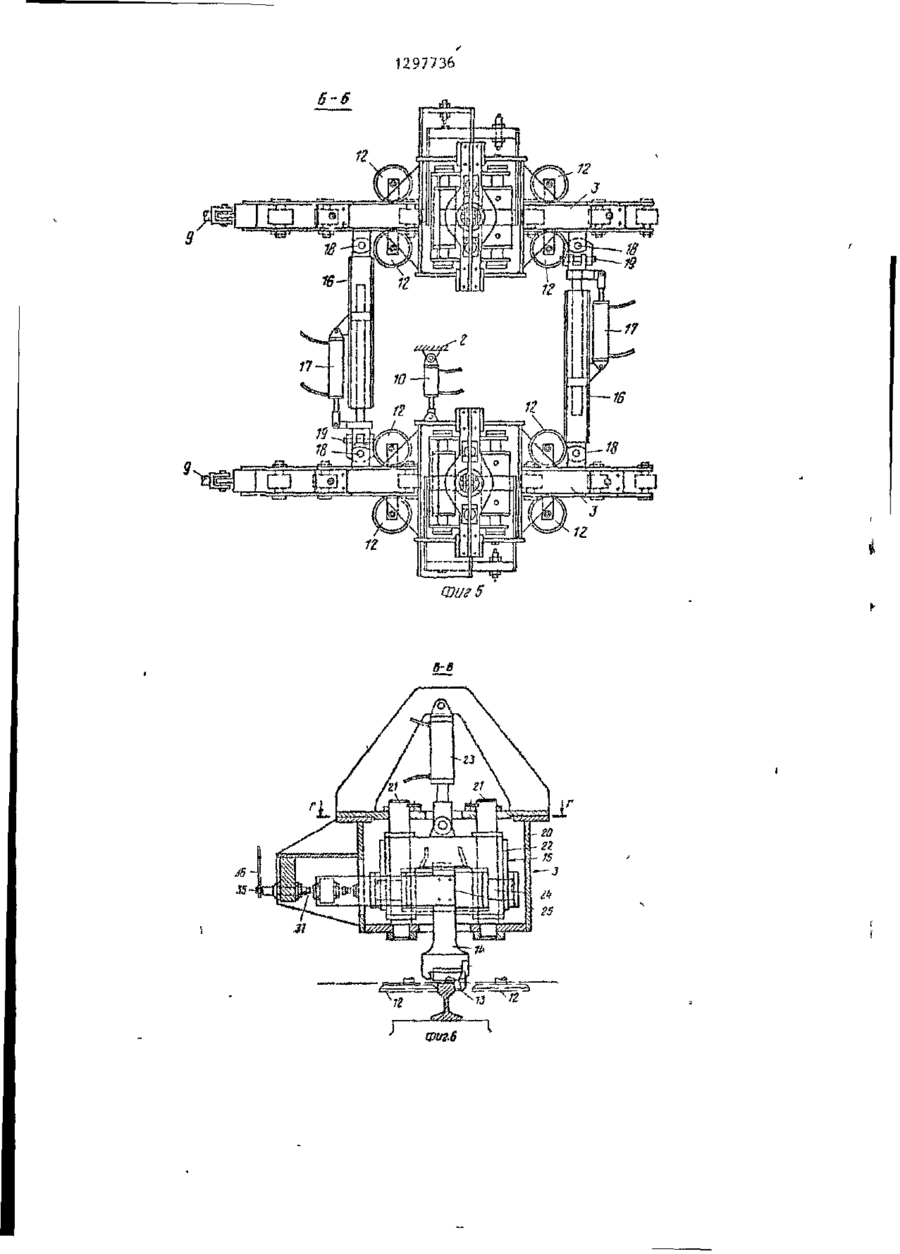
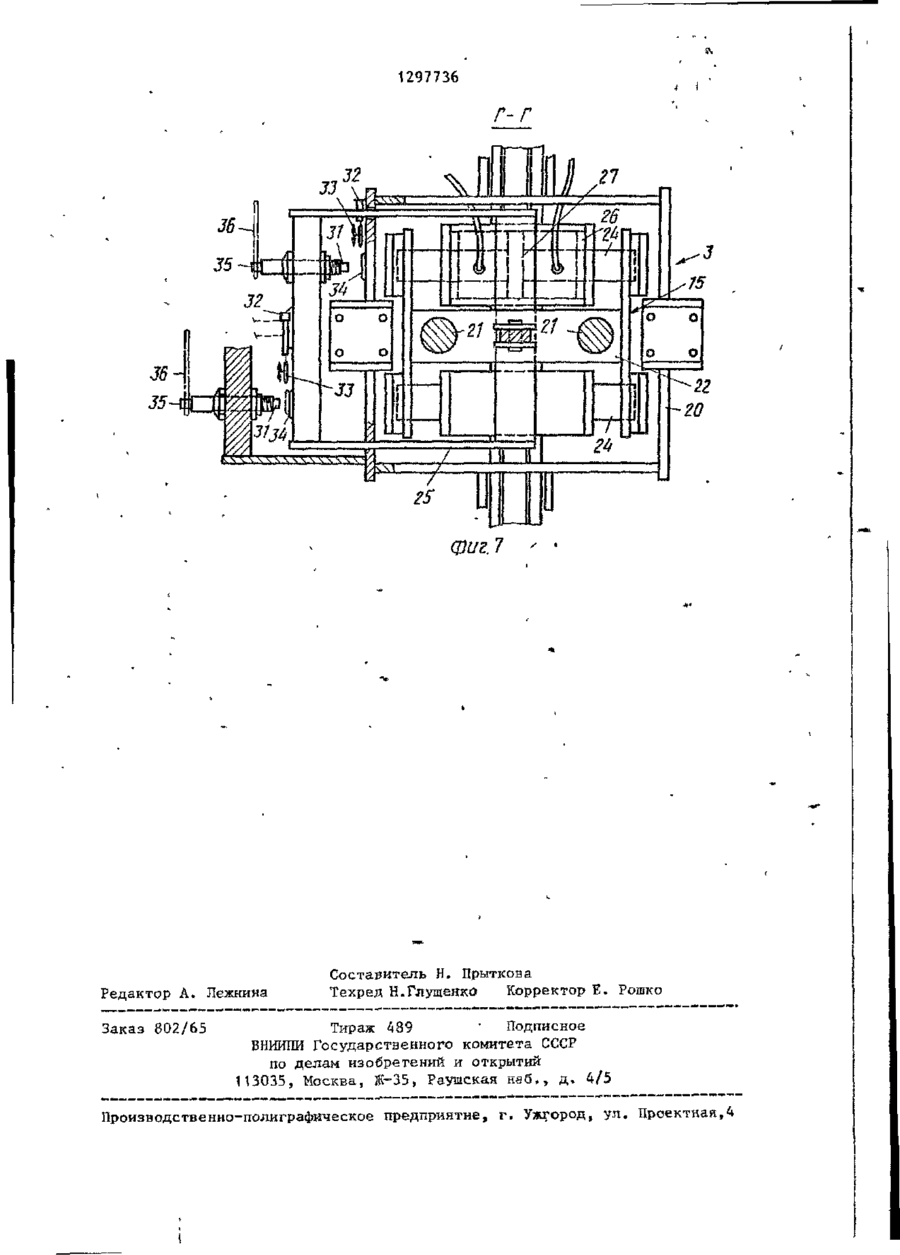
СОЮЗ С О В Е СОиуіАЛИСТИЧЕСНИХ РЄСПУ5ЛИН (ПІ -і СУ f\ *7 '"У О f* Д6 U * *UV (51)4 Е 0 1 В 3 1 / 1 2 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ тей с поверхностей рельсов железнодорожного пути содержит опирающуюся на ходовые тележки 1 раму 2, на которой установлены с обеих сторон от продольной оси машины инструментальные рамы 3 с возможностью перестановки по высоте гидроцилиндрами 4. Рамы 3 размещены между тележками 1 над соответствующими рельсами пути. На раме 2 смонтированы собственный привод 5 машины, который является реверсивным и может регулироваться, путевые тяговые приборы 6, источник 7 энергии и блок 8 управления. Рамы 3 (54) МАШИНА НА РЕЛЬСОВОМ ХОДУ ДЛЯ НЕПРЕРЫВНОГО СНЯТИЯ НЕРОВНОСТЕЙ С ПО- соединены с рамой 2 тягами 9. На рамах 3 закреплены ролики * горизон, ВЕРХНОСТИ РЕЛЬСОВ ЖЕЛЕЗНОДОРОЖНОГО тальными осями вращения для направПУТИ ления рамы 3 по рельсам и ролики с (57) Изобретение относится к устройствам Для снятия неровностей с поверх- вертикальными осяки вращения для взаимодействия с боковыми поверхностяностей рельсов железнодорожного пути. ми головок рельсов. Ролики с вертиЦель изобретения - повышение точноскальными осями вращения закреплены ти установки инструментов относительна каждой раме 3 попарно с обеих стоно обрабатываемых рельсов- Машина на рон инструмента для обработки рельрельсовом ходу для снятия неровнос(21) 2938261/27-П (22) 24.06.80 (31) А 5536/79 (32) 14.08.79 (33) A T (46) 1 5 . 0 3 . 8 7 . Бюл. № 10 (71) Франц ЇІлассєр Банбаумашннен-Йндустригезєльшафт мбХ (AT) (72) Йозеф Тойрер (AT) (53) 625.144.6:621.924 (088.8) (56) Патент Австрии № 344771, кл. 19а 37, 1978. «Г7 о—сг Ї297736 э установленном на суппорте. Рамы 3» а следовательно, и установленные на них суппорты соединены между собой посредством телескопических элементов с гидроцилиндрами для их раздвижки. Суппорт состоит из двух частей, на первой из которых установлены вертикальные направляющие, а на второйгоризонтальные направляющие, размещенные с обеих сторон вертикальных направляющих над соответствующим рельсом пути перпендикулярно продоль ' - , . . , 1 ной оси машины. Вниз ' т * п , . ,т„ т»«-« каждого суппорта закреплен инструмент для обработки рельсов, сверху этой части на одной из горизонтальных направляющих установлен гидроцилиндр ее перемещения, поршень которого жестко закреплен на этой направляющей, указанная одна часть суппорта связана с гидроцилиндром его перемещения по вертикальным направляющим и соединена с горизонтальными направляющими второй части суппорта. 4 з.п. ф-лы, 7 ил. , . . . , 1 Изобретение относится к устройстчее или транспортное положения предвам для снятия неровностей с поверхназначены гидроцилиндры 10,шарнирно ности рельсов железнодорожного пути. соединенные с соответствующей раЦель изобретения - повышение точмой 3 и рамой 2. Каждая рама 3 опиности установки инструментов отнорается на рельсы роликами 11 с госительно обрабатываемых рельсов, а ризонтальными осями вращения для натакже регулирование глубины обработправления рамы 3 по рельсам. На кажки реЛЬСОВ . -• • . " дой раме 3 закреплены ролики 12 с . вертикальными осями вращения для На фиг.1 изображена машина на взаимодействия с боковыми поверхносрельсовом ходу для снятия неровностями головок рельсов. Ролики 12 зактей с поверхности уложенных в путь реплены на каждой раме 3 попарно с рельсов, общий вид,' на фиг.2 - инобеих сторон инструмента 13 для обструментальная рама, вид сбоку снаработки рельсов, который закреплен'.ружи колеи^ на фиг.З - разрез А-А на 15 на держателе 14 инструмента 13,ус-'' фиг.2,' на фиг.4 - инструментальная тановленном на направляющем суппоррама, вид сбоку внутри колеи; на те 15. Рамы 3, размещаемые над рельфиг.5 - разрез Б-Б на фиг.4;на фиг.6 сами пути, а следовательно, и устаразрез В-В на фиг.4^ на фиг.7 - разновленные на них суппорты 15 соедирез Г-Г на фиг.6. Машина, на рельсовом ходу для не- 20,нены, между собой посредством телескопических элементов 16. имеющих прерывного, снятия неровностей с погидроцилиндры 17 двойного действия верхности рельсов железнодорожного для их раздвижки. Телескопические пути содержит опирающуюся на ходовые элементы 16 с рамами 3 соединены шартележки 1 раму 2, на которой устанирами 18, имеющими вертикальные оси новлены с обеих сторон от продольвращения, и.шарнирами 19, имеющими ной оси машины инструментальные рагоризонтальные оси вращения. Гидромы 3 с возможностью перестановки по цилиндрами 17 обеспечивается прижим высоте гидроцилиндрами 4. Рамы 3 разроликов 12 к боковым поверхностям • • мещены между тележками 1 над соответствующими рельсами пути. На раме 30 головок рельсов снаружи колеи или внутри нее. При помощи роликов 11 и 2 смонтированы собственный привод 5 12 обеспечивается точное отслеживамашины, который является реверсивние рамами 3 поверхностей рельсов, ным и может регулироваться, путевые а следовательно, и точное направление тяговые упоры 6, источник 7 энергии и блок 8 управления. Рамы 3 соедине- 35 инструментов 13 относительно обрабатываемых рельсов. Рама 3 представляны с рамой 2 машины тягами 9. Для ет собой коробчатый корпус 20, в ксг^ облегчения установки рам 3' в рабо 1297736 " 4 новка суппортов 15, несущих инструтором жестко закреплены две вертименты !3 для обработки рельсов. Кеільііьіс пеш^аилшОЩИс: І і • ^уППОрд ! j Упоры 31 ограничивают перемещение состоит из двух частей, одна из косуппорта 15 относительно рамы 3 и фикторых 22 установлена на этих вертисируют необходимую глубину врезания кальных направляющих 21 с возможноинструмента 13 в обрабатываемый рельс. стью перемещения по ним гидроцилиндЕсли для снятия неровностей с рельса ром 23. На части 22 суппорта закнеобходимо более одного рабочего прореплены горизонтальные направляющие хода, величина срезаемых за каждый 24, с которыми связана вторая часть проход неровностей может быть огра25 суппорта. Направляющие 24 распоничена за счет выдвигания пластин 33 ложены по обе стороны направляющих и установки их между суппортом 15 и 21 перпендикулярно продольной оси упором 31. За счет выполнения супмашины, а держатель 14 прикре гш е и к порта "из двух частей, установки на части 25 суппорта 15. На одной из нем направляющих 21 и 24 и наличия направляющих 24 установлен гидроцироликов 12 обеспечивается точная услиндр 26 перемещения части 25 суптановка инструментов 13 относительно порта 15, поршень 27 которого жестобрабатываемых рельсов. ко закреллен на этой направляющей 24, Формула изобретения Цилиндр 26 предназначен для вза- 20 имного перемещения частей 22 и 25 1. Машина на рельсовом ходу для суппорта 15. Все гидроцилиндры манепрерывного снятия неровностей с шины соответствующими трубопроводаповерхности рельсов железнодорожного ми соединены с источником 7 энергии 25 пути, содержащая опирающуюся -на ходочерез блок 8 управления. вые тележки раму, по меньшей мере одНа держателе 14 (фиг.З) выполнену инструментальную раму, установленна выемка в форме ласточкиного хвосную на раме машины между ходовыми тета, в которой при помощи пластины лежками с возможностью перестановки 28 жестко закреплен инструмент 13 в 30 по высоте гидроцилиндрами, направвиде резца. Режущая часть 29 резца ляющие суппорты, несущие инструменты выполнена из очень прочного материадля обработки рельсов и смонтированла, твердого сплава и прикреплена ные на инструментальной раме с возраспорной пластиной 30. Для снятия можностью перемещения поперек машины наката с рельсов режущая кромка резца устанавливается под углом пример- 35 при помощи телескопических элементов, а также перемещения по вертикальным но 45 к горизонтальной плоскости. Машина содержит (фиг.4, 6 и 7) ре- направляющим, размещаемым снаружи колеи, и горизонтальным направляющим гулируемые упоры ЗЇ для ограничения соответствующими гидроцилиндрами,роперемещения суппортов 15 в верти40 лики с горизонтальными осями вращения кальной и горизонтальной плоскостях. для направления инструментальной раУпоры 31 смонтированы на рамах 3, мы по рельсам, установленные на этой на которых также смонтированы подраме, источник энергии и блок управвижные от приводов 32 промежуточные ления, связывающий указанные гидропластины 33, размещаемые между упора45 цилиндры с источником энергии,о т~ ми 31 и упорными поверхностями 34 л ич а ю щ а я с я тем, что, с суппортов 15. Упоры 31 устанавливаютцелью повышения точности установки ся в необходимое положение при помощи шестигранника 35 для надевания на инструментов относительно обрабатынего ключа 36. ваемых рельсов, она снабжена роликаМашина работает следующим образом. 50 ми с вертикальными осями вращения На участках пути, рельсы которых для взаимодействия с боковыми поверхностями головок рельсов, дополнительподлежат обработке, гидроцилиндрами ными вертикальными направляющими,до4 инструментальные рамы 3 опускаются, полнительными горизонтальными направопираются через ролики 11 на рельсы 55 ляющими и дополнительными гидроципути, гидроцилиндрами 17 ролики 12 линдрами, каждый направляющий супприжимаются к одной из боковых попорт смонтирован ка отдельной инструверхностей головок рельсов. Гидроциментальной раме, размещаемой над солиндрами 23 и 26 производится уста 1297736 ответетвующіім рельсом пути, и состоит из двух частей, на одной из которых установлены соответствующие вертикальная направляющая и дополнительная вертикальная направляющая, разме- 5 щаемая внутри колеи, а на второй соответствующие горизонтальная направляющая и дополнительная горизонтальная направляющая, размещенные с обеих сторон указанных вертикальных ^ направляющих над соответствующим рельсом пути перпендикулярно продольной оси машины, при этом внизу второй части каждого суппорта закреплен инструмент для обработки рельсов, свер- ' • ху этой части ча одной из указанных горизонтальных направляющих установлен гидроцилиндр ее перемещения,поршень которого жестко закреплен на этой направляющей, указанная одна 20 часть направляющего суппорта связана с гидроцилиидром его перемещения по вертикальным направляющим и соединена с горизонтальной направляющей и дополнительной горизонтальной направ,_25 ляющей второй части суппорта, а ролики с вертикальными осями вращения закреплены на каждой инструментальной раме попарно с обеих сторон инструмента для обработки регтьсов. 2. Машина по п.1, о т л и ч а ю щ а я с я тем, что она снабжена установленными на инструментальных рамах регулируемыми упорами для ограничения перемещения направляющих суппортов в вертикальной и горизонтальной плоскостях. 3. Машина по пп. 1 и 2, о т л ич а ю щ а я с я тем, что, с целью регулирования глубины обработки рельсов, она снабжена смонтированными на инструментальных рамах подвижными от приводов промежуточными пластинами, размещаемыми между указанными упорами и упорными поверхностями на- • правляющих суппортов. 4. Машина по п,1, о т л и ч а ю щ а я с я тем, что каждая инструментальная рама соединена с рамой машины посредством соответствующего дополнительного гидроцилиндра. 5. Машина по п.1, о т л и ч а ю щ а я с я тем, что каждая инструментальная рама соединена с рамой машины тягой. ІШ___£сї). ' іг/ —А \гз {г фи? 2 1297736 /1-А Фи г 5 в-в Фиг.6 1297736 г-г фиг.7 Редактор А. Лежнина Заказ 802/65 Составитель Н. Прыткова Техред Н.Глущенко Корректор Е. Рошко Тираж 489 * Подписное ВНИИІШ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская нзб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4 1%
ДивитисяДодаткова інформація
МПК / Мітки
МПК: E01B 31/00
Мітки: безперервного, знімання, рейок, машина, шляху, залізничного, поверхні, рейковому, ходу, нерівностей
Код посилання
<a href="https://ua.patents.su/8-4769-mashina-na-rejjkovomu-khodu-dlya-bezperervnogo-znimannya-nerivnostejj-z-poverkhni-rejjok-zaliznichnogo-shlyakhu.html" target="_blank" rel="follow" title="База патентів України">Машина на рейковому ходу для безперервного знімання нерівностей з поверхні рейок залізничного шляху</a>
Машина для виправлення залізничного шляху
Номер патенту: 3574
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: залізничного, шляху, машина, виправлення
Формула / Реферат:
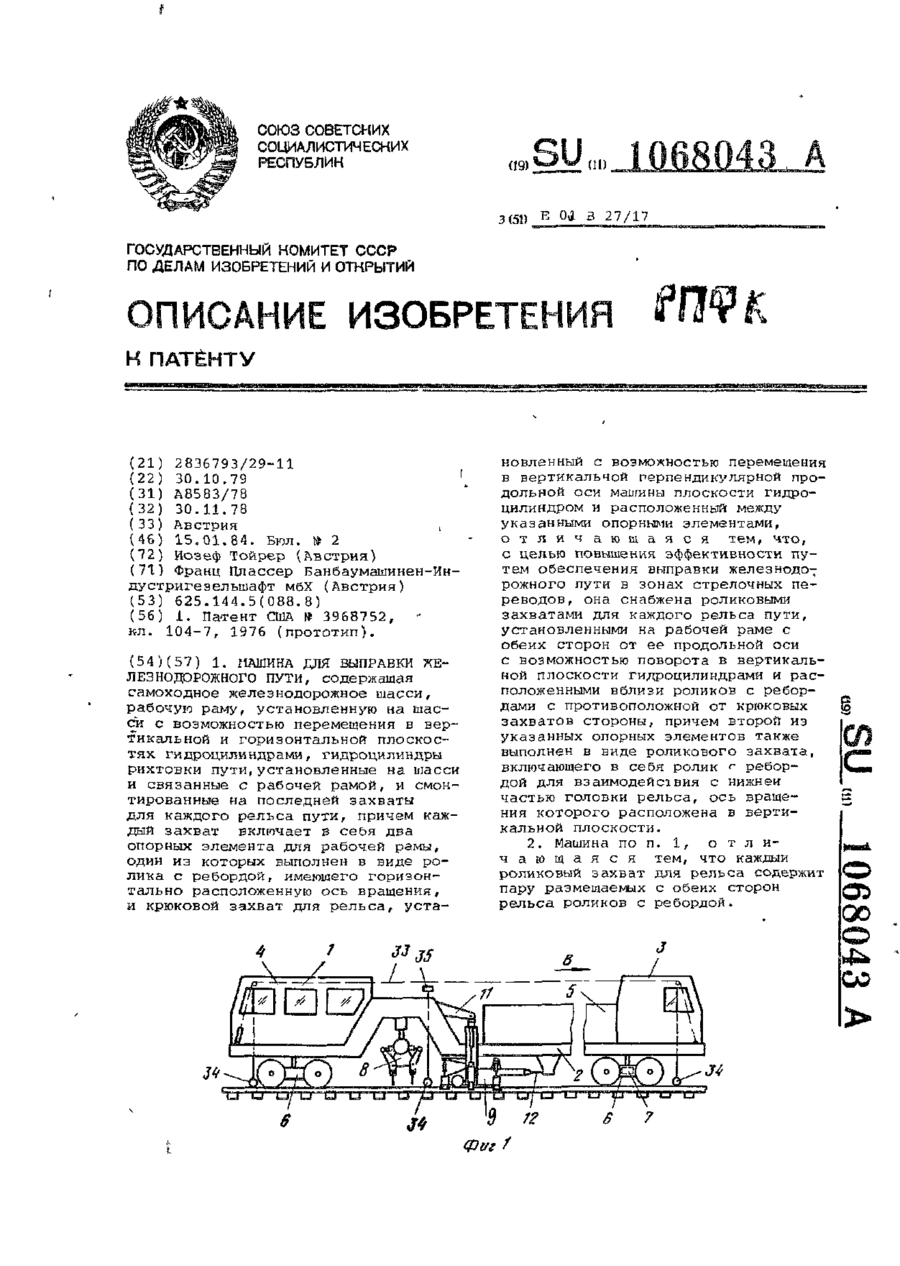
1. Машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, рабочую раму, установленную на шасси с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, гидроцилиндры рихтовки пути, установленные на шасси и связанные с рабочей рамой, и смонтированные на последней захваты для каждого рельса пути, причем каждый захват включает в себя два опорных элемента для рабочей рамы, один из...
Машина для заміни ланок залізничного шляху
Номер патенту: 3614
Опубліковано: 27.12.1994
Автори: Фрідріх Оеллєрер, Йозеф Тойрер
МПК: E01B 29/00
Мітки: шляху, машина, заміни, ланок, залізничного
Формула / Реферат:
1. Машина для замены звеньев железнодорожного пути, преимущественно стрелочных переводов, содержащая мостообразную раму, опирающуюся концами на железнодорожные и гусеничные тележки, и устройство для подъема и укладки указанных звеньев, имеющее балку, трособлочную систему и крюковые захваты для звеньев, при этом балка смонтирована в нижней части рамы и расположена вдоль нее, отличающаяся тем, что, с целью повышения производительности и...
Пересувна машина для виправки залізничного шляху у плані та профілі в зонах стрілочних переведень
Номер патенту: 3603
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17, E01B 35/00
Мітки: залізничного, профілі, стрілочних, виправки, переведень, машина, зонах, плані, пересувна, шляху
Формула / Реферат:
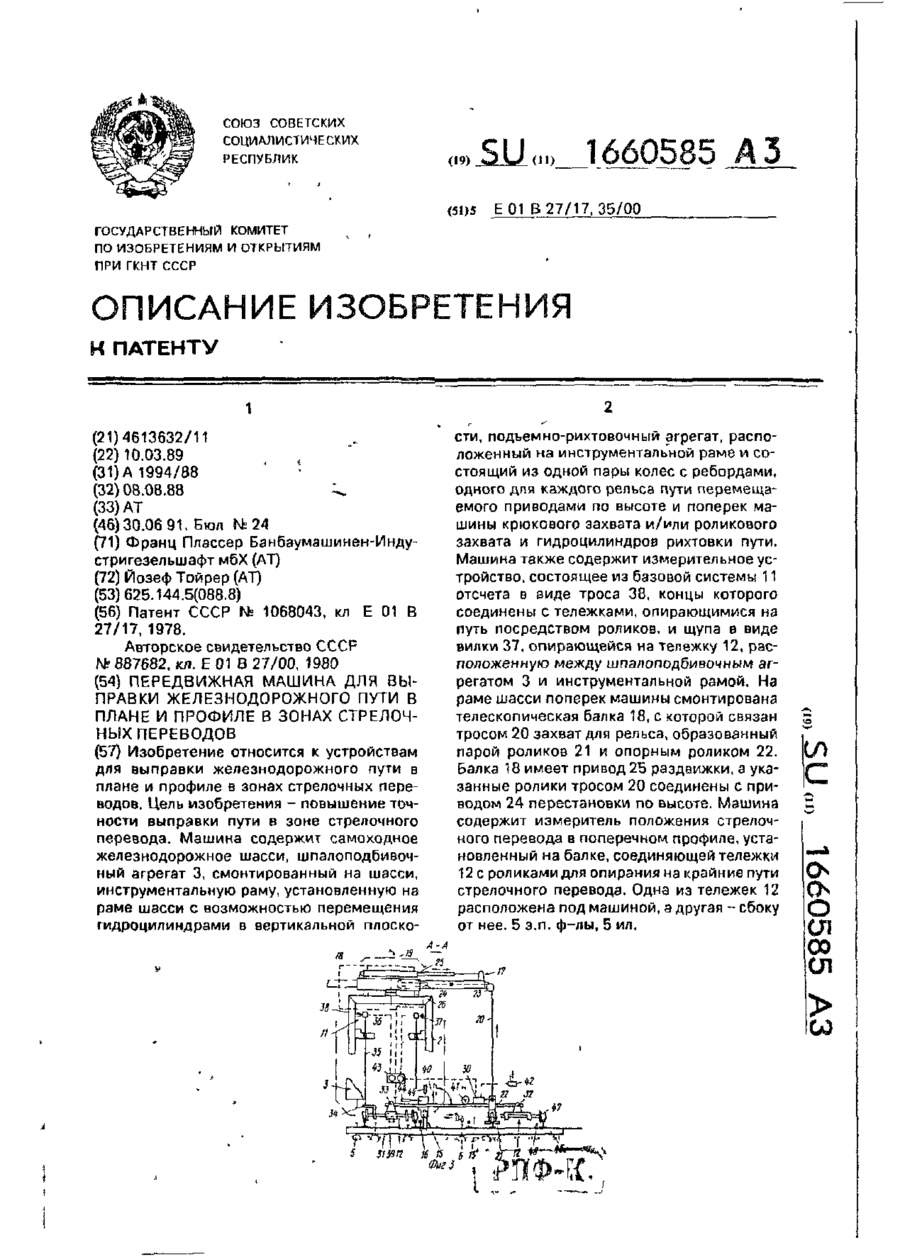
1. Передвижная машина для выправки железнодорожного пути в плане и профиле в зоне стрелочных переводов, содержащая самоходное железнодорожное шасси, на раме которого смонтированы шпалоподбивочный агрегат, инструментальная рама, установленная относительно рамы шасси с возможностью перемещения в вертикальной плоскости гидроцилиндрами и несущая подъемно-рихтовочный агрегат, состоящий из по меньшей мере од ной пары колес с ребордам и, одного...
Машина для безперевного укладання шару піску поміж земляним полотном та шаром щебеню залізничного шляху
Номер патенту: 5581
Опубліковано: 28.12.1994
Автори: Манфред Бруннінгер, Йозеф Тойрер
МПК: E01B 27/02
Мітки: шару, безперевного, залізничного, шляху, укладання, полотном, піску, шаром, щебеню, машина, поміж, земляним
Формула / Реферат:
1. Машина для непрерывной укладки слоя песка между земляным полотном и слоем щебня железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней цепь для выемки щебня, ленточный транспортер для подачи песка и щебня, установленный на раме с возможностью поворота в горизонтальной плоскости и расположенный за цепью по направлению работы машины, и планировщик песка, отличающаяся тем, что, с целью повышения...
Улаштування для транспортування та заміни шпал залізничного шляху
Номер патенту: 4784
Опубліковано: 28.12.1994
Автори: Йоханн Хансманн, Фрідріх Оєллєрер, Йозеф Тойрер
МПК: E01B 29/00
Мітки: шпал, транспортування, улаштування, залізничного, заміни, шляху
Формула / Реферат:
1. Устройство для транспортирования и замены шпал железнодорожного пути, содержащее состав полувагонов, направляющие балки в виде рельсов, установленных вдоль состава с обеих сторон от его продольной оси, грузонесущий орган, установленный с возможностью перемещения по указанным рельсам, и механизм для замены шпал, отличающееся тем, что, с целью повышения производительности, оно снабжено установленным на рельсы портальным краном с...
Попередній патент: Труба для камерної печі
Наступний патент: Ошиновка алюмінієвого електролізера
Випадковий патент: Премікс для лактуючих корів