Машина для виправлення залізничного шляху
Формула / Реферат
1. Машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, рабочую раму, установленную на шасси с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, гидроцилиндры рихтовки пути, установленные на шасси и связанные с рабочей рамой, и смонтированные на последней захваты для каждого рельса пути, причем каждый захват включает в себя два опорных элемента для рабочей рамы, один из которых выполнен в виде ролика с ребордой, имеющего горизонтально расположенную ось вращения, и крюковой захват для рельса, установленный с возможностью перемещения в вертикальной перпендикулярной продольной оси машины плоскости гидроцилиндром и расположенный между указанными опорными элементами, отличающаяся тем, что, с целью повышения эффективности путем обеспечения выправки железнодорожного пути в зонах стрелочных переводов, она снабжена роликовыми захватами для каждого рельса пути, установленными на рабочей раме с обеих сторон от ее продольной оси с возможностью поворота в вертикальной плоскости гидроцилиндрами и расположенными вблизи роликов с ребордами с противоположной от крюковых захватов стороны, причем второй из указанных опорных элементов также выполнен в виде роликового захвата, включающего в себя ролик с ребордой для взаимодействия с нижней частью головки рельса, ось вращения которого расположена в вертикальной плоскости.
2. Машина по п. 1, отличающаяся тем, что каждый роликовый захват для рельса содержит пару размещаемых с обеих сторон рельса роликов с ребордой.
Текст
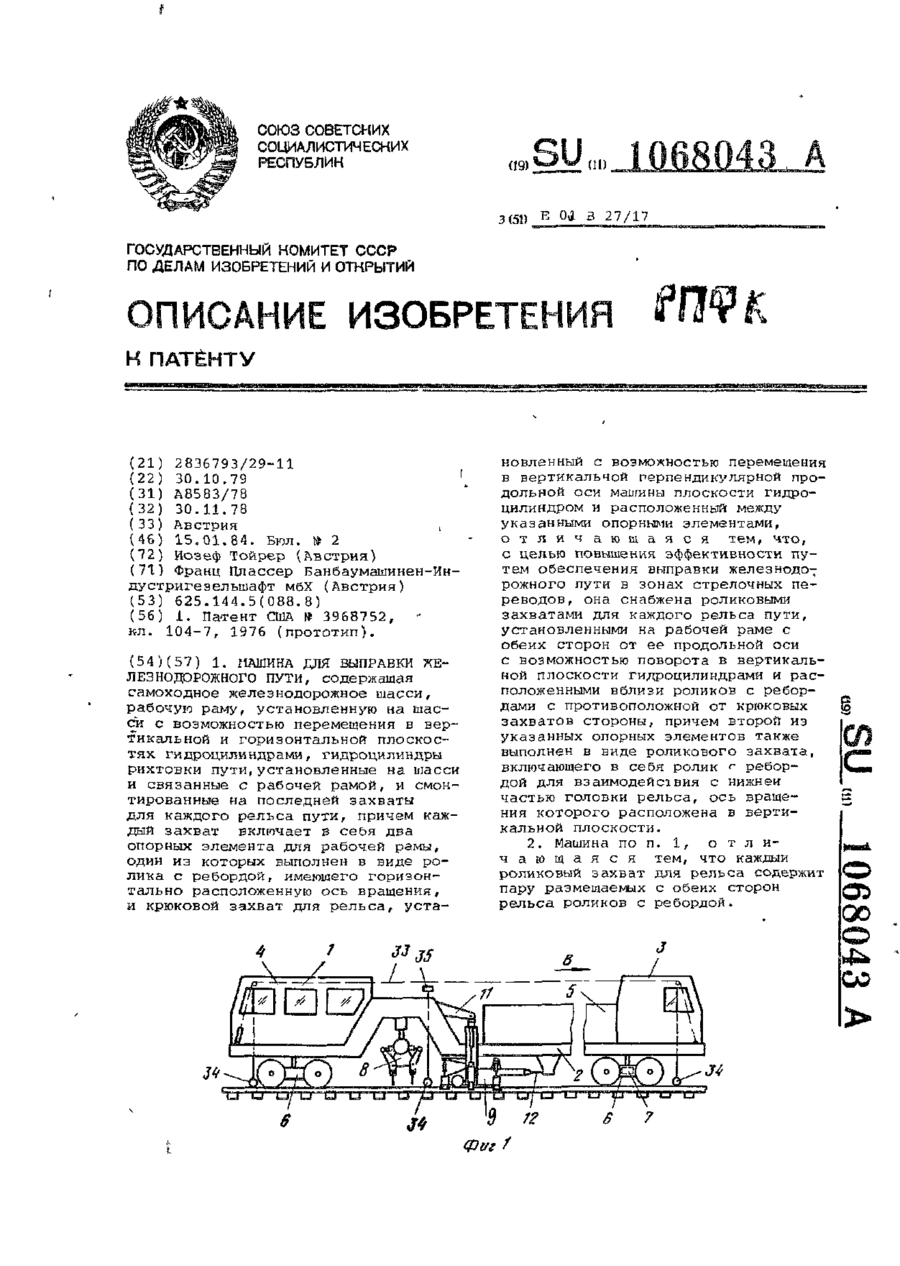
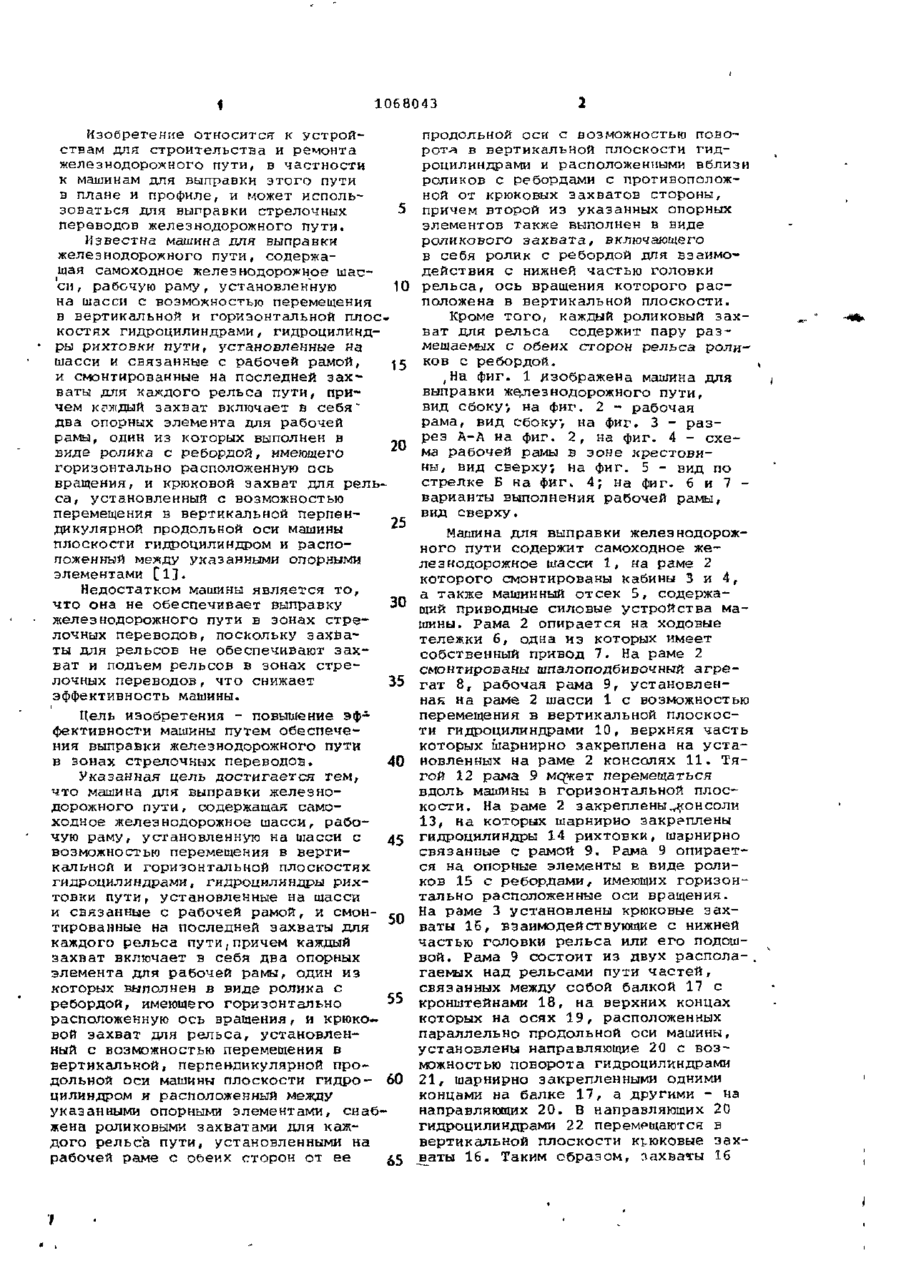
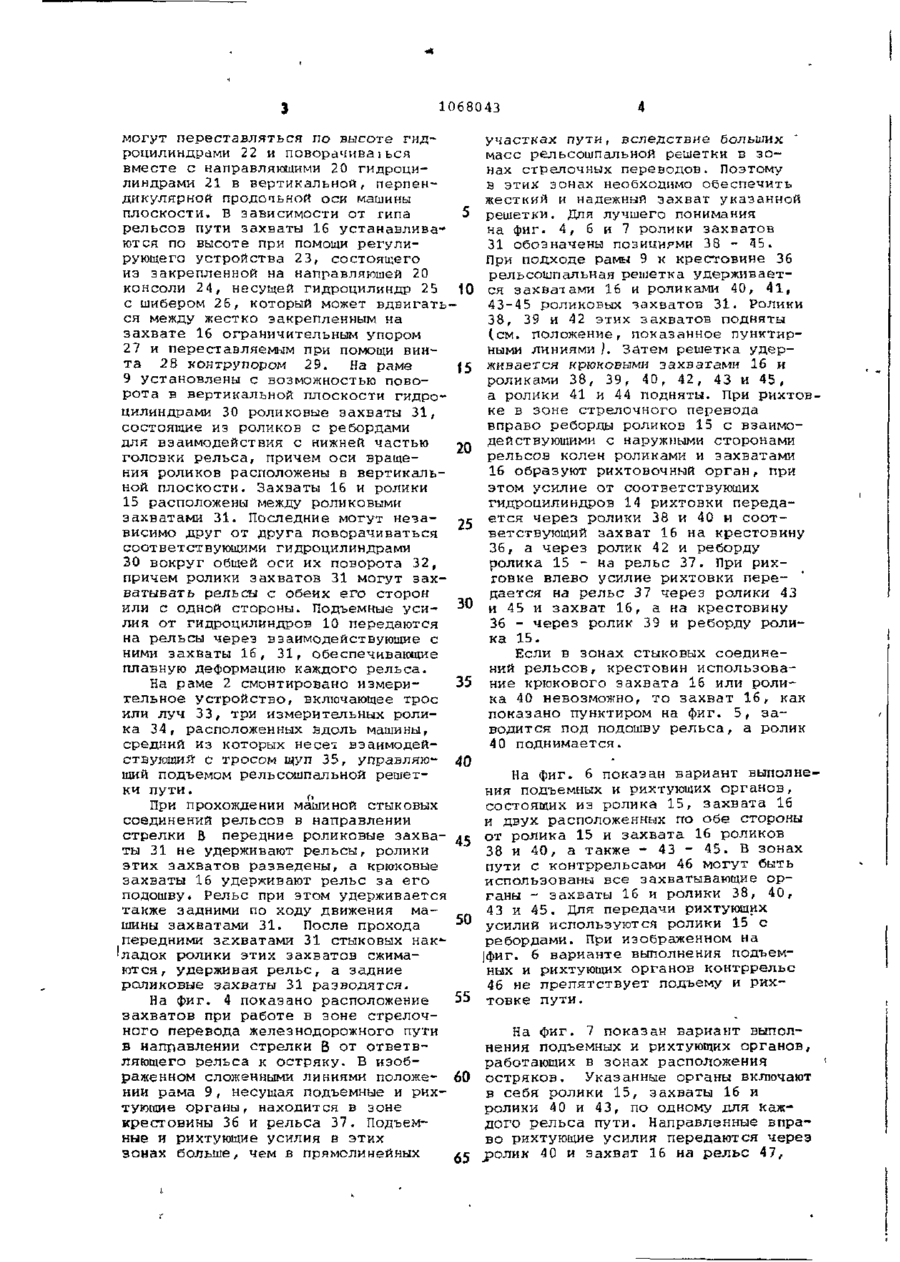
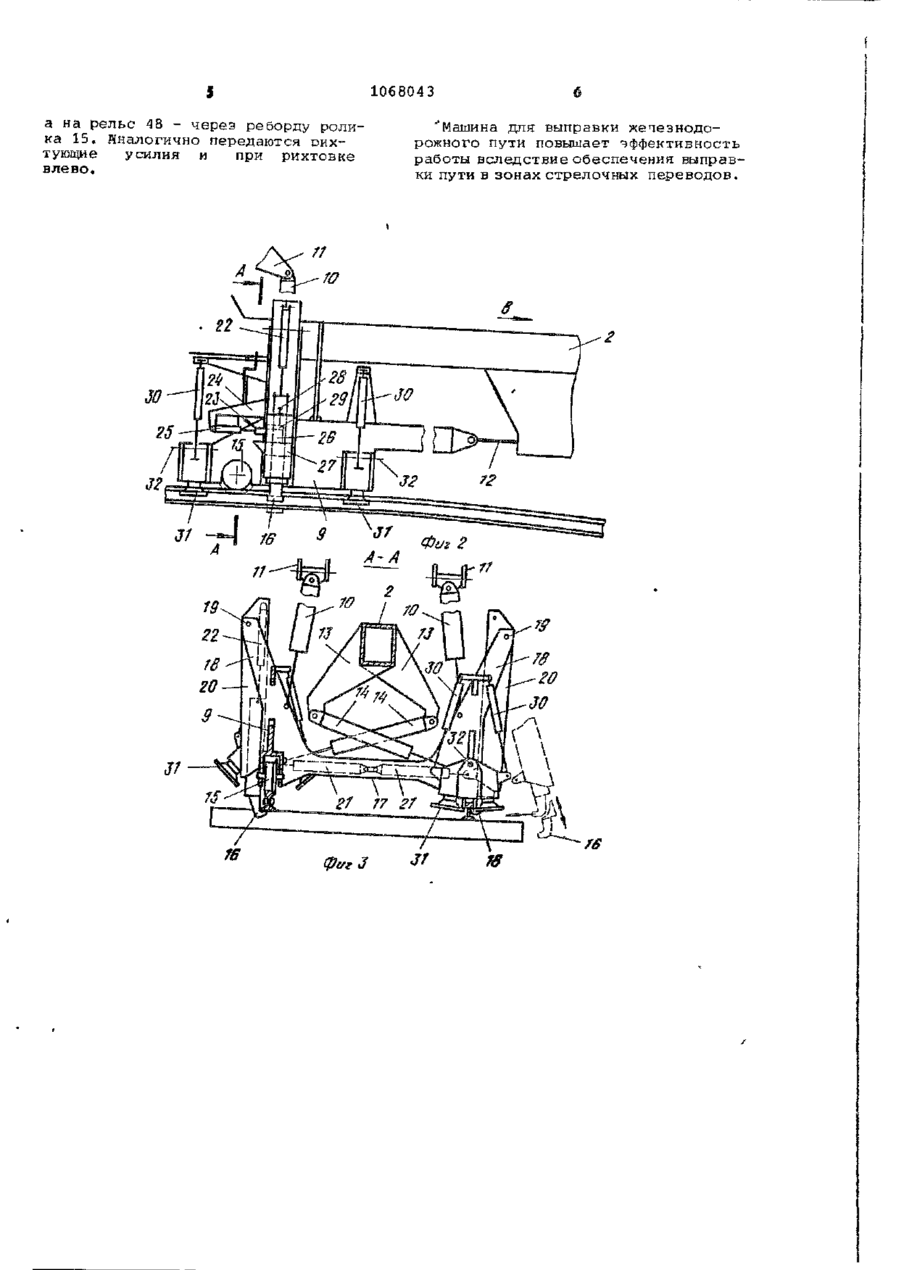
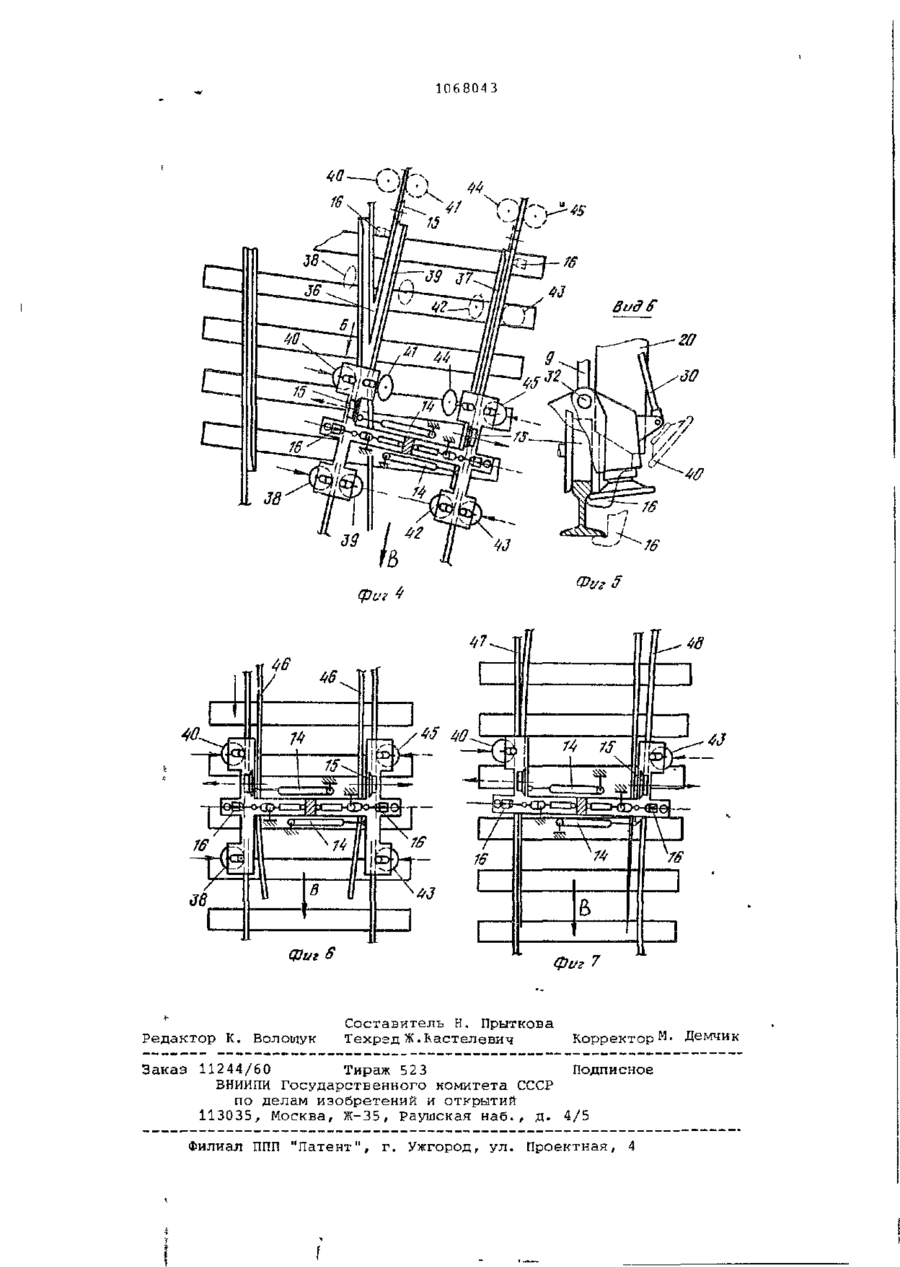
СОЮЗ СОВЕТСКИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИК 3( 51) Е 0 0 3 27/17 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИИ (21) 2836793/29-11 (22) 30.10.79 (31) А8583/78 (32) 30.11.78 (33) Австрия (46) 15.01.84. Бюл.№ 2 (72) Иозеф Тойрер (Австрия) (71) Франц Щтассер Банбаумашинен-Индустригеэелъшафт мбХ (Австрия) (53) 625.144.5(088.8) (56) 1. Патент США № 3968752, кл. 104-7, 1976 (прототип). ( 5 4 ) ( 5 7 ) 1. Н Ш Н ДЛЯ В П А К ЖЕА И А Ы Р В И ЛЕЗНОДОРОЖНОГО ПУТИ, содержащая самоходное железнодорожное шасси, рабочую раму, установленную на шасси с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, гидроцилиндры рихтовки пути,установленные на шасси и связанные с рабочей рамой, и смонтированные на последней захваты для каждого рельса пути, причем каждый з а х в а т включает в себя два опорных элемента для рабочей рамы, один из которых выполнен в виде ролика с ребордой, имеющего горизонтально расположенную ось вращения, и крюковой захват для р е л ь с а , у с т а новленный с возможностью перемещения в вертикальной перпендикулярной продольной оси машины плоскости гидроцилиндром и расположенный между указанными опорными элементами, о т л и ч а ю щ а я с я тем, что, с цеяьго повышения эффективности путем обеспечения выправки железнодо^ рожного пути в зонах стрелочных переводов, она снабжена роликовыми захватами для каждого рельса пути, установленными НА рабочей раме с обеих сторон от ее продольной оси с возможностью поворота в вертикальной плоскости гидроцилиндрами и р а с положенными вблизи роликов с ребордами с противоположной от крюковых захватов стороны, причем второй из указанных опорных элементов также выполнен в виде роликового з а х в а т а , включающего в себя ролик г ребордой для вз аимодейсівия с нижней частью головки рельса, ось вращения которого расположена в вертикальной плоскости. 2. Машина по п. 1, о т л и ч а ю щ а я с я тем, что каждый роликовий захват для рельса содержит пару размещаемых с обеих сторон рельса роликов с ребордой. О 1 1068043 Изобретение относится к устройствам для строительства и ремонта железнодорожного пути, в частности к машинам для выправки этого пути в плане и профиле, и может использоваться для выправки стрелочных переводов железнодорожного пути. Известна машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, рабочую раму, установленную 10 на шасси с возможностью перемещения в вертикальной и горизонтальной плос. костях гидроцилиндрами, гидроцилиндры рихтовки пути, установленные на шасси и связанные с рабочей рамой, 15 и смонтированные на последней зах~ваты для каждого рельса пути, причем каждый захват включает в себя" два опорных элемента для рабочей рамы, один из которых выполнен в 20 виде ролика с ребордой, имеющего горизонтально расположенную ось вращения, и крюковой захват для рельса, установленный с возможностью перемещения в вертикальной перпен25 дикулярной продольной оси машины плоскости гидроцилиндром и расположенный между указанными опорными элементами [1]. Недостатком машины является то, 30 что она не обеспечивает выправку железнодорожного пути в зонах стрелочных переводов, поскольку захваты для рельсов не обеспечивают захват и подъем рельсов в зонах стрелочных переводов, что снижает 35 эффективность машины. Цель изобретения - повышение эффективности машины путем обеспечения выправки железнодорожного пути в зонах стрелочных переводов. 40 Указанная цель достигается тем, что машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, рабочую раму, установленную на шасси с 45 возможностью перемещения в вертикаль-ноп и горизонтальной плоскостях гидроцилиндрами, гидроцнлиндры рихтовки пути, установленные на шасси и связанные с рабочей рамой, и смонтированные на последней захваты для 50 каждого рельса пути,причем каждый захват включает в себя два опорных элемента для рабочей рамы, один из которых выполнен в виде ролика с 55 ребордой, имеющего горизонтально расположенную ось вращения, и крюковой захват для рельса, установленный с возможностью перемещения в вертикальной, перпендикулярной продольной оси машины плоскости гидро- 60 цилиндром и расположенный между указанными опорными элементами, снабжена роликовыми захватами для каждого рельса пути, установленными на рабочей раме с обеих сторон от ее 65 продольной оси с возможностью поворот - в вертикальной плоскости гида роцилиндрами и расположенными вблизи роликов с ребордами с противоположной от крюковых захватов стороны, причем второй из указанных опорных элементов также выполнен в виде роликового захвата, включающего В себя ролик с ребордой для взаимодействия с нижней частью головки рельса, ось вращения которого расположена в вертикальной плоскости. Кроме того, каждый роликовый захват для рельса содержит пару размещаемых с обеих сторон рельса роликов с ребордой. , , , На фиг. 1 изображена машина для выправки железнодорожного пути, вид сбоку, на фиг. 2 - рабочая рама, вид сбоку, на фиг. 3 - разрез А-А на фиг. 2, на фиг. 4 - схема рабочей рамы в зоне крестовины, вид сверху, на фиг. 5 - вид по стрелке Б на фиг. 4; на фиг. 6 и 7 варианты выполнения рабочей рамы, вид сверху. Машина для выправки железнодорожного пути содержит самоходное железнодорожное шасси 1, на раме 2 которого смонтированы кабины 3 и 4, а также машинный отсек 5, содержащий приводные силовые устройства машины. Рама 2 опирается на ходовые тележки б, одна из которых имеет собственный привод 7. На раме 2 смонтированы шпалоподбивочный агрегат 8, рабочая рама 9, установленная; на раме 2 шасси 1 с возможностью перемещения в вертикальной плоскости гидроцилиндрами 10, верхняя часть которых шарнирно закреплена на установленных на раме 2 консолях 11. Тягой 12 рама 9 Mqwer перемещаться вдоль машины в горизонтальной плоскости. На раме 2 закреплены^консоли 13, на которых шарнирно закреплены гидроцилиндры 14 рихтовки, шарнирно связанные с рамой 9. Рама 9 опирается на опорные элементы Е виде роликов 15 с ребордами, имеющих горизонтально расположенные оси вращения. На раме 3 установлены крюковые захваты 1В, взаимодействующие с нижней частью головки рельса или его подошвой. Рама 9 состоит из двух распола-. гаемых над рельсами пути частей, связанных между собой балкой 17 с кронштейнами 18, на верхних концах которых на осях 19, расположенных параллельно продольной оси машины, установлены направляющие 20 с возможностью поворота гидроцилиндрами 21, шарнирно закрепленными одними концами на балке 17, а другими - на направляющих 20. В направляющих 20 гидроцилиндрами 22 перемещаются в вертикальной плоскости крюковые захваты 16. Таким образом, захваты 16 1068043 могут переставляться по высоте гидроцилиндрами 22 и поворачиваіься вместе с направляющими 20 гидроцилиндрами 21 в вертикальной, перпендикулярной продочьной оси машины плоскости, в зависимости от типа рельсов пути захваты 16 устанавливаются по высоте при помощи регулирующего устройства 23, состоящего из закрепленной на направляющей 20 консоли 2 4, несущей гидроцилиндр 25 10 с шибером 26, который может вдвигаться между жестко закрепленным на захвате 16 ограничительным упором 27 и переставляемым при помощи винта 28 контрупором 29. На раме |5 9 установлены с возможностью поворота в вертикальной плоскости гидроцилиндрами 30 роликовые захваты 31, состоящие из роликов с ребордами для взаимодействия с нижней частью 20 головки рельса, причем оси вращения роликов расположены в вертикальной плоскости. Захваты 16 и ролики 15 расположены между роликовыми захватами 31. Последние могут независимо друг от друга поворачиваться 25 соответствующими гидроцилиндрами 30 вокруг общей оси их поворота 32, причем ролики захватов 31 могут захватывать рельсы с обеих его сторон или с одной стороны. Подъемные усилия от гидроцилиндров 10 передаются на рельсы через взаимодействующие с ними захваты 16, 31, обеспечивающие плавную деформацию каждого рельса. 35 На раме 2 смонтировано измерительное устройство, включающее трос или луч 33, три измерительных ролика 34, расположенных вдоль машины, средний из которых несет взаимодействующий с тросом щуп 35, управляю- 40 щий подъемом рельсошпальной решетки пути. При прохождении машиной стыковых соединений рельсов в направлении стрелки В передние роликовые захваты 31 не удерживают рельсы, ролики этих захватов разведены, а крюковые захваты 16 удерживают рельс за его подошву. Рельс при этом удерживается также задними по ходу движения машины захватами 31. После прохода передними захватами 31 стыковых нак*'ладок ролики этих захватов сжимаются, удерживая рельс, а задние роликовые захваты 31 разводятся. 55 На фиг. 4 показано расположение захватов при работе в зоне стрелочного перевода железнодорожного пути в направлении стрелки В от ответвляющего рельса к остряку. В изображенном сложенными линиями положе- 60 нии рама 9, несущая подъемные и рихтующие органы, находится в зоне крестовины 36 и рельса 37. Подъемные и рихтующие усилия в этих зонах больше, чем в прямолинейных участнах пути, вследствие больших масс рельсошпальной решетки в зонах стрелочных переводов. Поэтому в этик зонах необходимо обеспечить жесткий и надежный захват указанной решетки. Для лучшего понимания на фиг. 4, 6 и 7 ролики захватов 31 обозначены позициями 3 8 - 45. При подходе рамы 9 к крестовине 36 рельсошпальная решетка удерживается захватами 16 и роликами 40, 41, 4 3-45 роликовых захватов 31. Ролики 38, 39 и 42 этих захватов подняты (см. положение, показанное пунктирными линиями }. Затем решетка удерживается крюковыми захватами 16 и роликами 38, 39, 40, 42, 43 и 45, а ролики 41 и 44 подняты. При рихтовке в зоне стрелочного перевода вправо реборды роликов 15 с взаимодействующими с наружными сторонами рельсов колен роликами и захватами 16 образуют рихтовочный орган, при этом усилие от соответствующих гидроцилиндров 14 рихтовки передается через ролики 38 и 40 и соответствующий захват 16 на крестовину 36, а через ролик 42 и реборду ролика 15 - на рельс 37. При рихговке влево усилие рихтовки передается на рельс 37 через ролики 43 и 45 и захват 16, а на крестовину 36 - через ролик 39 и реборду ролика 15. Если в зонах стыковых соединений рельсов, крестовин использование крюкового захвата 16 или ролика 40 невозможно, то захват 16, как показано пунктиром на фиг. 5, заводится под подошву рельса, а ролик 40 поднимается. На фиг. 6 показан вариант выполнения подъемных и рихтующих органов, состоящих из ролика 15, захвата 16 и двух расположенных по обе стороны от ролика 15 и захвата 16 роликов 38 и 40, а также - 43 - 45. В зонах пути с контррельсами 46 могут быть использованы все захватывающие органы - захваты 16 и ролики 38, 40, 4 3 и 45. Для передачи рихтующих усилий используются ролики 15 с ребордами. При изображенном на |фиг. 6 варианте выполнения подъемных и рихтующих органов контррельс 46 не препятствует подъему и рихтовке пути. На фиг. 7 показан вариант выполнения подъемных и рихтующих органов, работающих в зонах расположения остряков. Указанные органы включают в себя ролики 15, захваты 16 и ролики 40 и 43, по одному для каждого рельса пути. Направленные вправо рихтующие усилия передаются через ролик 40 и захват 16 на рельс 47, 1068043 а на рельс 48 - через реборду ролика 15. Диалогично передаются оихтующие усилия и при рихтовке влево. ""Машина для выправки же че з подорожного пути повышает эффективность работы вследствие обеспечения выправки пути в зонах стрелочных переводов. 31 /s 1068043 38 фиг Фаг 6 Редактор К. Волощук Фаг 7 Составитель Н. Прыткова Техрэд Ж.Кастелевич Корректор1^* Демчик Заказ 11244/60 Тираж 523 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5 Филиал ППП "Патент", г. Ужгород, ул. Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMachine for repair of rail track
Назва патенту російськоюМашина для исправления железнодорожного пути
МПК / Мітки
МПК: E01B 27/17
Мітки: виправлення, залізничного, шляху, машина
Код посилання
<a href="https://ua.patents.su/6-3574-mashina-dlya-vipravlennya-zaliznichnogo-shlyakhu.html" target="_blank" rel="follow" title="База патентів України">Машина для виправлення залізничного шляху</a>
Пристрій для підбивки шпал та виправлення шляху для шляхової машини з змонтованою на ходових візках рамою
Номер патенту: 3611
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: змонтованою, ходових, шляху, підбивки, візках, шпал, машини, шляхової, рамою, виправлення, пристрій
Формула / Реферат:
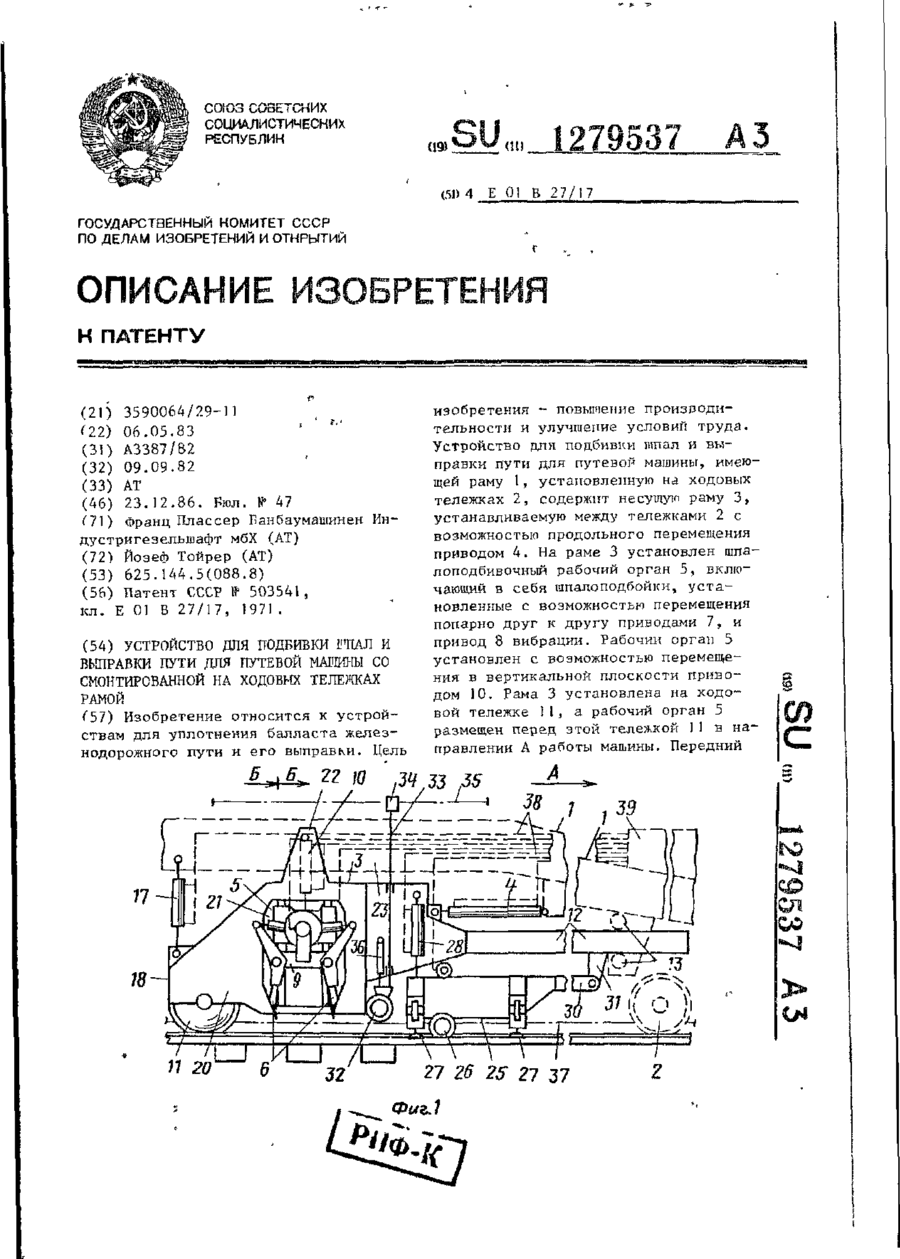
1. Устройство для подбивки шпал и выправки пути для путевой машины со смонтированной на ходовых тележках рамой, содержащее несущую раму, устанавливаемую между указанными ходовыми тележками с возможностью продольного перемещения приводом, шпалоподбивочный рабочий орган, установленный на несущей раме с возможностью перемещения в вертикальной плоскости приводом, смонтированный перед шпало-подбивочным органом по направлению работы машины...
Безперервно пересувна у процесі роботи виправочнопідбивочно-обробна машина
Номер патенту: 3602
Опубліковано: 27.12.1994
Автори: Йьора Ганц, Йоханн Хансманн
МПК: E01B 27/17
Мітки: процесі, безперервної, машина, роботи, виправочнопідбивочно-обробна, пересувна
Формула / Реферат:
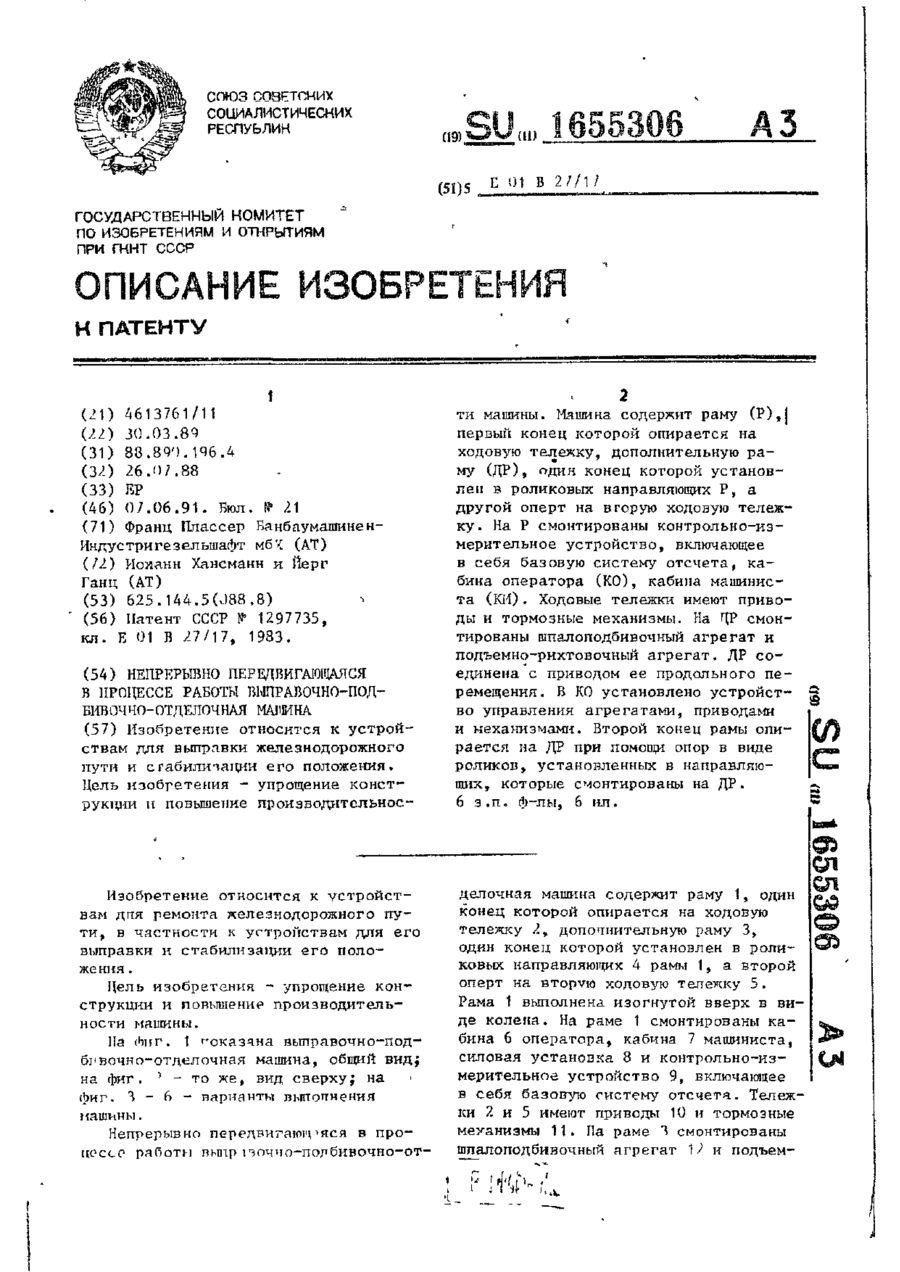
1. Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина, содержащая раму, один конец которой оперт на ходовую тележку, смонтированные на раме кабину оператора, силовую установку, привод ходовой тележки, контрольно-измерительное устройство, включающее в себя базовую систему отсчета, дополнительную раму, один конец которой установлен в направляющих рамы машины, а второй оперт на вторую ходовую тележку, привод...
Шпалопідбивочна машина

Номер патенту: 3620
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/16
Мітки: шпалопідбивочна, машина
Формула / Реферат:
Шпалоподбивочная машина, содержащая установленную на ходовые тележки раму, шпалоподбивочный агрегат, смонтированный на раме с возможностью перемещения в вертикальной плоскости приводом и состоящий из инструментальной рамы, установленных на ней шпалоподбивочных инструментов, размещенных по две пары с обеих сторон от продольной оси машины, виброприводов и приводов подачи шпалоподбивочных инструментов, отличающаяся тем, что, с целью...
Машина для розподілу та профілювання баласту залізничної колії
Номер патенту: 3579
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/02
Мітки: розподілу, баласту, колії, профілювання, машина, залізничної
Формула / Реферат:
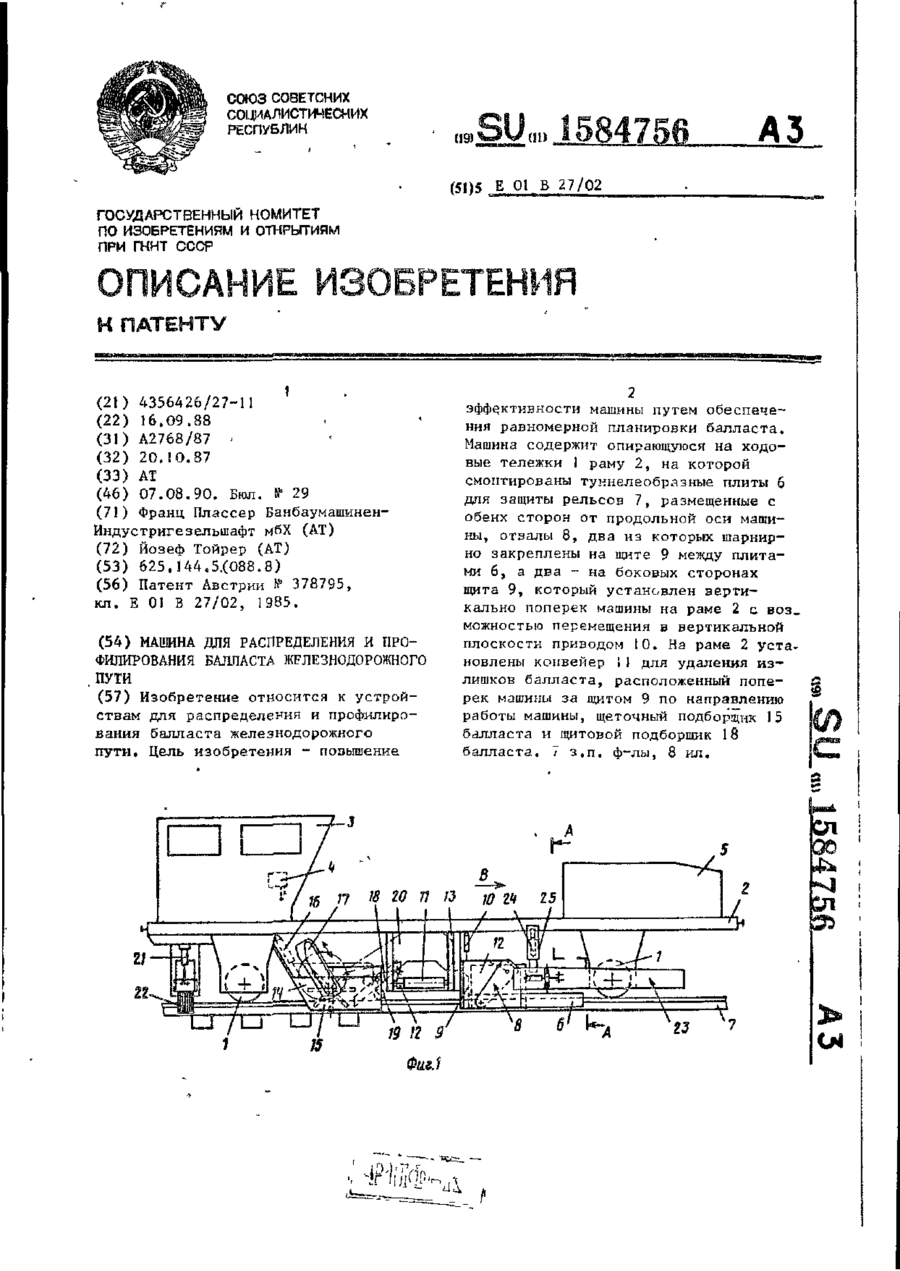
1. Машина для распределения и профилирования балласта железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней туннелеобразные плиты для защиты рельсов, размещенные с обеих сторон от продольной оси машины, отвалы, установленные с возможностью поворота приводами вокруг вертикальных осей, конвейер для удаления излишков балласта, расположенный поперек машины, щеточный подборщик балласта, закрепленный на...
Поршнева машина

Номер патенту: 639
Опубліковано: 15.12.1993
Автор: Борисенко Іван Ілліч
МПК: F01B 9/06
Формула / Реферат:
1. Поршневая машина, содержащая корпус, поршень, установленный в корпусе с образованием рабочих полостей и связанный с поперечным валом, на концах которого закреплены ролики, одни из которых - с возможностью взаимодействия с прямолинейным пазом, выполненным в неподвижном стакане, соединенным с корпусом, а другие - с криволинейным пазом, выполненным на внутренней поверхности подвижной втулки, соединенной с выходным валом, установленным в...
Попередній патент: Спосіб отримання 2,5-дігалоген-4-тіацианопиримідину
Наступний патент: Спосіб забеспечення симетрічності вертикальної складної магнітного поля у електролізерах для отримання алюмінію
Випадковий патент: 5,7-діамінопіразоло[4,3-d]піримідини з інгібуючою активністю по відношенню до фде-5