Пересувна машина для виправки залізничного шляху у плані та профілі в зонах стрілочних переведень
Формула / Реферат
1. Передвижная машина для выправки железнодорожного пути в плане и профиле в зоне стрелочных переводов, содержащая самоходное железнодорожное шасси, на раме которого смонтированы шпалоподбивочный агрегат, инструментальная рама, установленная относительно рамы шасси с возможностью перемещения в вертикальной плоскости гидроцилиндрами и несущая подъемно-рихтовочный агрегат, состоящий из по меньшей мере од ной пары колес с ребордам и, одного для каждого рельса пути перемещаемого приводами по высоте и поперек машины крюкового и/или роликового захвата и гидроцилиндров рихтовки пути, измерительное устройство, включающее в себя ролики, базовую систему отсчета, концы которой соединены с роликами, и взаимо-деиствуюший с ней щуп, опирающийся на путь посредством опоры, которая расположена между шпалоподбивочным агрегатом и инструментально': рлмои, а также устройство для подъемки рядом лежащего пути стрелочного перевода, включающее в себя телескопическую балку, расположенную поперек машины, и связанный с телескопической балкой захват для рельса, отличающаяся тем, что, с целью повышения точности выправки пути в зоне стрелочного перевода, она снабжена измерителем положения стрелочного перевода в поперечном профиле, указанная опора образована тележками с роликами для опирания на крайние пути стрелочного перевода, одна из которых расположена под машиной, а другая - сбоку нее, и балкой, соединяющей эти тележки и несущей указанный измеритель.
2. Машина по п. 1, отличающаяся тем, что она снабжена измерителем положения пути в поперечном профиле, представляющим собой маятниковый датчик уровня, установленный на расположенной под машиной тележке в зоне соединения се с балкой.
3. Машина по п. 1, отличающаяся тем, что балка выполнена из двух частей, шарнирно соединенных между собой и фиксируемых при помощи разъемного соединения.
4. Машина по п. 1, отличающаяся тем, что устройство для подъемки размещено перед инструментальной рамой по направлению работы машины.
5. Машина по п. 1, отличающаяся тем, что она снабжена установленным на балке контрольно-индикаторным устройством для визуального контроля за положением стрелочного перевода.
6. Машина по п. 1, отличающаяся тем, что она снабжена установленными на ходовых тележках шасси опорными цилиндрами для выключения подвески машины.
Текст
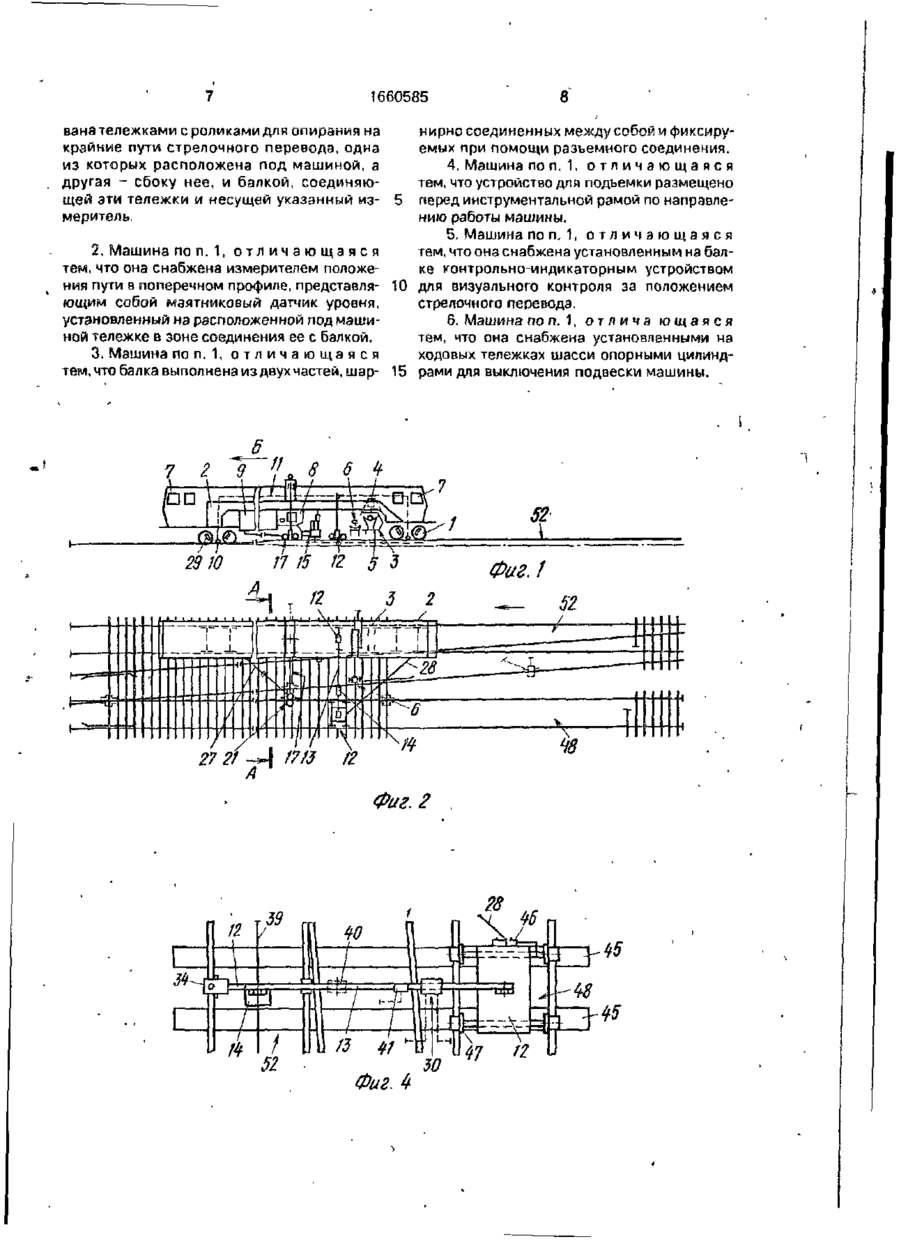
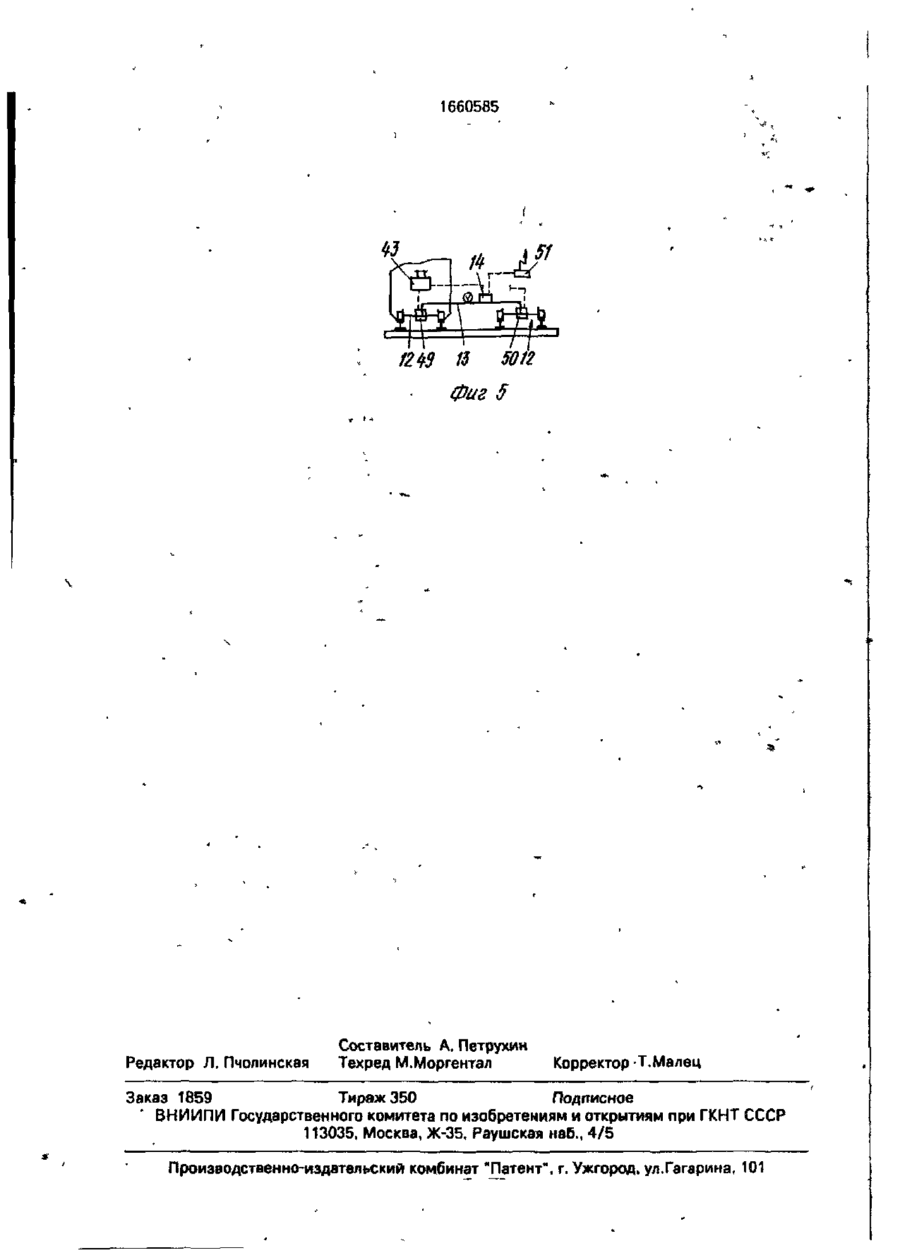
Изобретение относится к устройствам для выправки железнодорожного пути в плане и профиле в зонах стрелочных переводов. Цель изобретения - повышение точности выправки пути в зоне стрелочного перевода. Машина содержит самоходное железнодорожное шасси, шпалоподбивочный агрегат 3, смонтированный на шасси, инструментальную раму, установленную на раме шасси с возможностью перемещения гидроцилиндрами в вертикальной плоско сти, подъемно-рихтовочный агрегат, расположенный на инструментальной раме и состоящий из одной пары колес с ребордами, одного для каждого рельса пути перемещаемого приводами по высоте и поперек машины крюкового захвата и/или роликового захвата и гидроцилиндров рихтовки пути. Машина также содержит измерительное устройство, состоящее из базовой системы 11 отсчета в виде троса 38, концы которого соединены с тележками, опирающимися на путь посредством роликов, и щупа в виде вилки 37, опирающейся на тележку 12, расположенную между шпалоподбивочным агрегатом 3 и инструментальной рамой. На раме шасси поперек машины смонтирована телескопическая балка 18, с которой связан тросом 20 захват для рельса, образованный парой роликов 21 и опорным роликом 22. Балка 18 имеет привод 25 раздвижки, а указанные ролики тросом 20 соединены с приводом 24 перестановки по высоте. Машина содержит измеритель положения стрелочного перевода в поперечном профиле, установленный на балке, соединяющей тележки 12 с роликами для опирання на крайние пути стрелочного перевода. Одна из тележек 12 расположена под машиной, а другая - сбоку от нее. 5 з.п. ф-лы, 5 ил. С о о ел 00 ел W 1660585 Изобретение относится к устройствам для выправки железнодорожного пути, преимущественно в зонах стрелочных переводов, и может быть использовано при строительстве и ремонте пути. 5 ревода, лежащего рядом с путем, на котором находится машина. Устройство 17 состоит из телескопической балки 18, установленной на раме 2 с возможностью поворота (вращения) вокруг вертикальной оси 19 и размещаемой в процессе работы машины поперек нее. С балкой 18тросом 20 Цель изобретения - повышение точносвязан захват для рельса, образованный пасти выправки пути в зоне стрелочного перерой роликов 21 и опорным роликом 22, вза10 им оде и ст вую щи м с захватываемым На фиг. 1 - машина, общий вид; на фиг. рельсом. Трос 20 огибает блок 23 и соединен 2 - то же, вид сверху; на фиг. 3 - сечение А-А с приводом 24 перестановки по высоте рона фиг. 2; на фиг. 4-тележка, вид сверху; на ликов 21 и 22. Балка 18 имеет привод 25 фиг. 5 - вариант выполнения измерителя раздвижки. Для разгрузки опоры вращения положения стрелочного перевода в поперечном профиле. 15 балки 18 на раме 2 смонтирована опора 26 для взаимодействия с балкой 18. Захват для Передвижная машина для выправки жерельса и одна из тележек 12 соединены с лезнодорожного пути в плане и профиле в • возможностью разъема с рамой 2 соответстзонах стрелочных переводов содержит савенно тягами 27 и 28. Устройство 17 разме-. моходное железодорожное шасси, состоящее из опирающейся из ходовые тележки 1 20 щено перед рамой 15 по направлению рамы 2. На раме 2 смонтирован шпалоподработы машины. На каждой ходовой тележбивочный агрегат 3, переставляемый по выке 1 машины установлены опорные гидроцисоте приводом 4. Агрегат 3 состоит из линдры 29, предназначенные для жесткого связанных с виорогфиводом шпалоподбоек соединения рамы 2 с тележками 1 во время 5 и дополнительного шпалоподбивочного 25 работы устройства 17 и предотвращающие агрегата 6, установленного с возможностью перемещение рамы 2 относительно тележек перещения приводами по высоте и поперек 1 под действием боковых подъемных усимашины. На раме 2 смонтированы кабины 7 лий. управления с блоками управления приводаСогласно фиг. 3 измеритель 14 положеми машины, рабочая кабина 8 и силовая 30 ния стрелочного перевода в поперечном энергетическая установка 9 для обеспечепрофиле состоит из двух электрических мания работы всех приводов. На раме 2 также ятниковых датчиков 30 и 31 уровня. Датчик смонтироавано измерительное устройство, 30 установлен на балке 13, которая шарнисостоящее из тележек 10с роликами, опирарами 32 и 33 соединена с тележками 12. ющихся на путь, базовой системы 11 отсче35 Датчик 31 установлен в зоне шарнирного та, соединенной с тележками 10, соединения балки 13 и тележки 12. На терасположенными в зонах ходовых тележек, лежке 12, размещенной подмашиной, устаи взаимодействующего с системой 11 отсченовлена Г-образная опора 34, которая при та щупа, опирающегося на путь посредстпомощи стойки 35 соединена с потенциовом измерительных тележек 12 с роликами 40 метром 36, посредством вилки 37 взаимодейдля опираний на крайние пути стрелочного ствующий с тросом 38 измерительного перевода. Таким образом, тележки 12 опиустройства. Трос 38 устанавливается над раются на пути по всей ширине стрелочного каждым рельсом пути, на котором находитперевода. Тележки 12 соединены балкой 13, ся машина, в соответствии с заданным его размещенной поперек машины и несущей измеритель 14 положения стрелочного пе- 45 положением. Устройство определяет положение пути в продольном профиле. Другое ревода в поперечном профиле. На раме 2 измерительное устройство, включающее в установлена с возможностью перемещения себя измерительную хорду, образованную "в вертикальной плоскости гидроцилиндратросом 39, также связанным с потенциометми инструментальная рама 15, несущая подьемно-рихтовочный агрегат, который со- 50 ром, образует устройство для определения положения пути в плане. Хорда при этом стоит мз по меньшей мере одной пары колес является базовой системой отсчета. Балка с ребордами, одного для каждого рельса 13 может быть выполнена из двух частей, пути перемещаемого приводами по высоте соединенных шарниром 40 и зафиксироваии поперек машины крюкового захвата 16 и/или роликового захвата и гидроцилинд- 55 ных в необходимых случаях при помощи ров рихтовки пути. Тележки 12 расположеразъемного соединения. При помощи шарны между агрегатом 3 и инструментальной нира 40 тележка 12, расположенная сбоку памой 15, Машина также содержит устроймашины, может быстро подниматься вверх ство 17 для подъемки пути стрелочного пепосле окончания измерения одной поперечной зоны стрелочного перевода и при пере 1660585 езде машины к следующей его зоне Для казаниями контрольно-индикаторного устэтого эта тележка 12 и балка 13 выполнены ройства 41, визуальный контроль за положеиз легкого материала, например, алюминия. нием стрелочного перевода в поперечном профиле осуществляется обслуживающим Н£ балке 13 установлено контрольноиндикаторное устройство 41 для визуально- 5 персоналом. Таким образом, устройством 17 одновременно с под&ивкой и выправкой го контроля за положением стрелочного главного пути 52 производится подъемка пуперевода в поперечном профиле. Приводы ти 48, т. е. выправка стрелочного перевода 24 и 25 управляются при помоши дистанцив поперечном профиле но всей его ширине оного управляющего устройства 42, например, при помощи радио. Датчики 30 и 31 10 с учетом показаний базовой системы 11 отсчета измерительного устройства и измерисоединены с центральным блоком 43 vnpaBтеля 14. Одновременно с указанным ления, находящимся в кабине 8. Приводы производится подбивка шпал в зоне пути 4В 44 перемещают захваты 16 по высоте и подополнительным шпалоподбиеочным агреперек машины. Дополнительный шпалоподбивочный -агрегат 6 предназначен для 15 гатом 6, перемещаемым приводами поперек стрелочного перевода, что позволяет подбивки длинных брусьев 45, лежащих посохранить необходимое установленное устперек стрелочного перевода, т. є. зон ответройством 17 положение стрелочного перевления пути, лежащего рядом с путем на вода в поперечном профиле. Таким образом котором находится машина. производится выправка стрелочного переТележка 12, располагаемая сбоку маши- 20 вода при переезде машины от одноги бруса ны, выполнена двухосной (фиг. 2 и 4) Для 45 к другому. При работе машины измериточного перемещения этой тележки по пути тельное устройство и датчики 30 и 31 уровня на ней установлен распорный цилиндр 46 могут работать совместно или порознь (фиг. 4), при этом опорные ролики 47 с гребнем прижимаются к рельсам пути 48. Тяга 25 Машина обеспечивает точную выправку 28 воспринимает нагрузку по перекатывастрелочного перевода в поперечном профинию тележек 12, расположенных под машиле. ной и сбоку нее. снимая ее с балки 13. Формула изобретения 1. Передвижная машина для выправки Согласно фиг. 5 машина содержит также две тележки 12, одна из которых разме- 30 железнодорожного пути в плане и профиче в зонах стрелочных переводов, содержащая щена под машиной, а другая - сбоку самоходное железнодорожное шасси, на Тележки 12 соединены поперечной балкой раме которого смонтированы ыпалоподби13, несущей измеритель 14 положения стревочный агрегат, инструментапьная рама, услочного перевода в поперечном профиле. На каждой тележке 12 в зонах соединения 35 тановленная относительно рамы шасси с возможностью перемещения в вертикальих с балкой 13 установлены дополнительной плоскости гидроцилиндрами и несущая ные измерители 49 и 50 Измерители 14, 49 подъемно-ри>стовочный агрегат, состоящий и50 соединены с блоком -43 управления, а из по меньшей мере одной пары колес с измеритель 14 - с управляемым по радио управляющим устройством 51. 40 ребордами, одного для каждого рельса пути перемещаемого приводами по высоте и поМашина работает следующим образом. перек машины крюкового и/или роликового Машина перемещается по главному пузахвата и гидроцилиндров рихтовки пути, ти 52 в направлении стрелки Б, этот путь 52 измерительное устройство включающее в известным способом подбивается и высебя ролики, базовую систему отсчета, конправляется шпалоподбивочным агрегатом 3 45 цы которой соединены с роликами, и взаии подъемно-рихтсвочным агрегатом Когда модействующий с ней щуп, опирающийся машина приходит а зону стрелочного перена путь посредством опоры, которая расповода устройство 17 для подъемки рядом леложена между шпалоподбивочным агрегажащего пути стрелочного перевода опорным роликом 22 опирается на один из 50 том и инструментальной рамой, а гакже устройство для подъемки рядом лежащего рельсов пути, захватывая его затем роликапути стрелочного перевода, включающее в ми 21. Поднятые вверх тележки 12, которые себя телескопическую балку, расположенрасположены сбоку машины, опускаются на ную поперек машины, и связанный с телепуть. Цилиндр 46 точно устанавливает скопической балкой захват для рельса, о т опорные ролики 47 относительно рельсов 55 л и ч а ю щ а я с я тем, что, с целью повышепути 48, прижимая ролики 47 к этим рельния точности выправки пути в зоне стрелочсам. Подъем пути 52 и пути 48 по всей шиного перевода, она снабжена измерителем рине стрелочного перевода осуществляется положения стрелочного перевода в попеустройством 17 приводами 24 и 25, управляречном профиле, указанная опора образоемыми устройством 42 в соответствии с по 1660585 8 нирно соединенных между собой и фиксируемых при помощи разьемного соединения. 4. Машина по п. 1, о т л и ч а ю щ а я с я тем, что устройство для подъемки размещено перед инструментальной рамой по направлению работы машины. 5. Машина по п, 1, о т л и ч а ю щ а я с я 2. Машина по п. 1, о т л и ч а ю щ а я с я тем, что она снабжена установленным на балтем, что она снабжена измерителем положеке контрольно-индикаторным устройством ния пути в поперечном профиле, представля- 10 для визуального контроля за положением ющим собой маятниковый датчик уровня, стрелочного перевода. установленный на расположенной под маши6. Машина по г?. 1, отпілч а ю щ а я с я ной тележке в зоне соединения ее с балкой. тем, что она снабжена установленными на ходовых тележках шасси опорными цилинд3. Машина по п. 1, о т л и ч а ю щ а я с я тем, что балка выполнена из двухчастен, шар- 15 рами для выключения подвески машины. вана тележками сроликамидля опирання на крайние пути стрелочного перевода, одна из которых расположена под машиной, а другая - сбоку нее, и балкой, соединяющей эти тележки и несущей указанный измеритель. 27 2/ -*\ !7!3 /2 Фиг. 2 Фиг. 1660585 /243 Я 5012 Фиг 5 Редактор Л. Пчолинская Составитель А. Петрухин Техред М.Моргентал Корректор Т.Малец Заказ 1859 Тираж 350 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5 Производственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101
ДивитисяДодаткова інформація
Назва патенту англійськоюMovable machine for straightening rail track in plan and profile in zone of turnouts
Назва патенту російськоюПередвижная машина для выправки железнодорожного пути в плане и профиле в зоне стрелочных переводов
МПК / Мітки
МПК: E01B 27/17, E01B 35/00
Мітки: машина, плані, зонах, стрілочних, профілі, переведень, залізничного, шляху, пересувна, виправки
Код посилання
<a href="https://ua.patents.su/6-3603-peresuvna-mashina-dlya-vipravki-zaliznichnogo-shlyakhu-u-plani-ta-profili-v-zonakh-strilochnikh-pereveden.html" target="_blank" rel="follow" title="База патентів України">Пересувна машина для виправки залізничного шляху у плані та профілі в зонах стрілочних переведень</a>
Машина для виправлення залізничного шляху
Номер патенту: 3574
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: машина, шляху, залізничного, виправлення
Формула / Реферат:
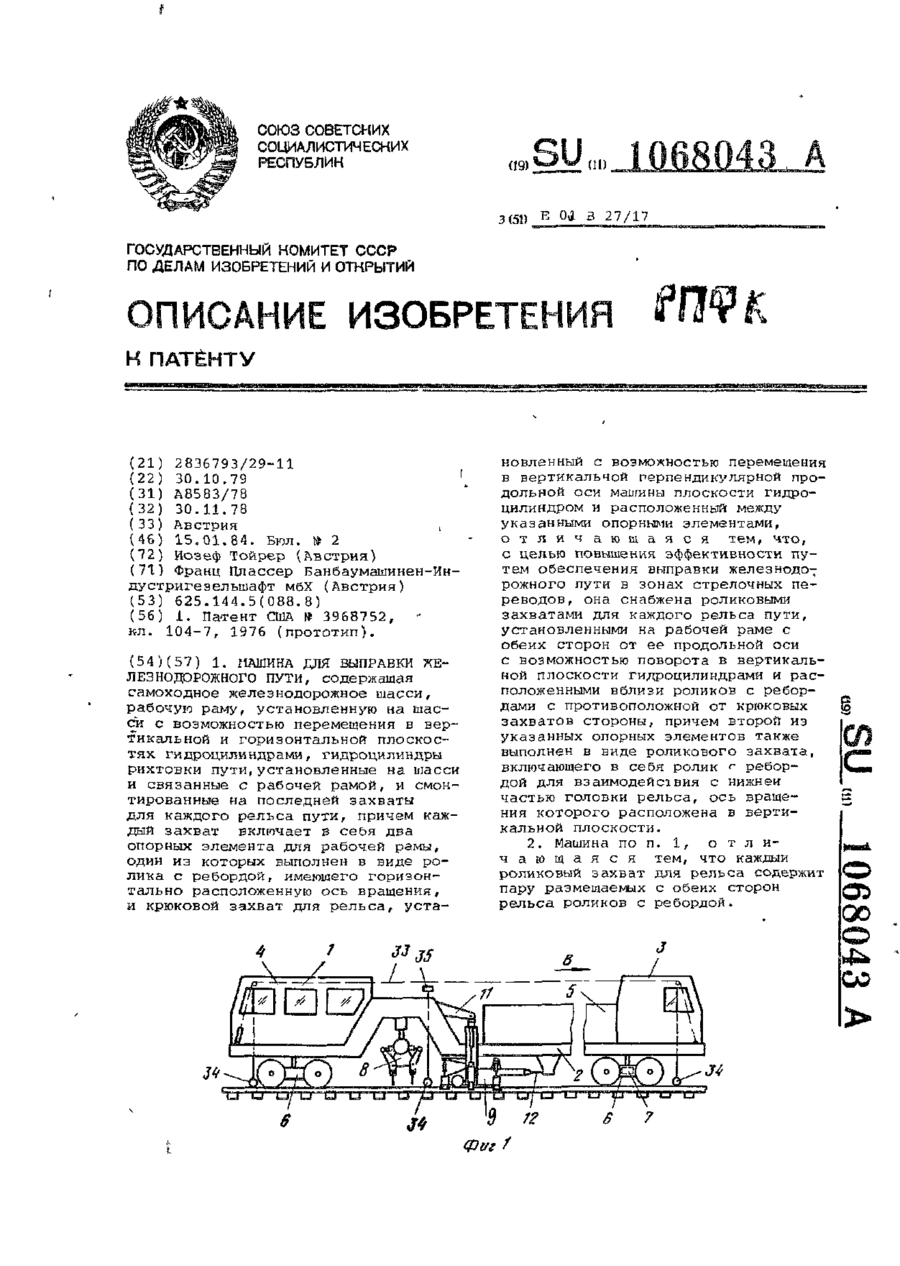
1. Машина для выправки железнодорожного пути, содержащая самоходное железнодорожное шасси, рабочую раму, установленную на шасси с возможностью перемещения в вертикальной и горизонтальной плоскостях гидроцилиндрами, гидроцилиндры рихтовки пути, установленные на шасси и связанные с рабочей рамой, и смонтированные на последней захваты для каждого рельса пути, причем каждый захват включает в себя два опорных элемента для рабочей рамы, один из...
Безперервно пересувна у процесі роботи виправочнопідбивочно-обробна машина
Номер патенту: 3602
Опубліковано: 27.12.1994
Автори: Йоханн Хансманн, Йьора Ганц
МПК: E01B 27/17
Мітки: безперервної, роботи, процесі, машина, пересувна, виправочнопідбивочно-обробна
Формула / Реферат:
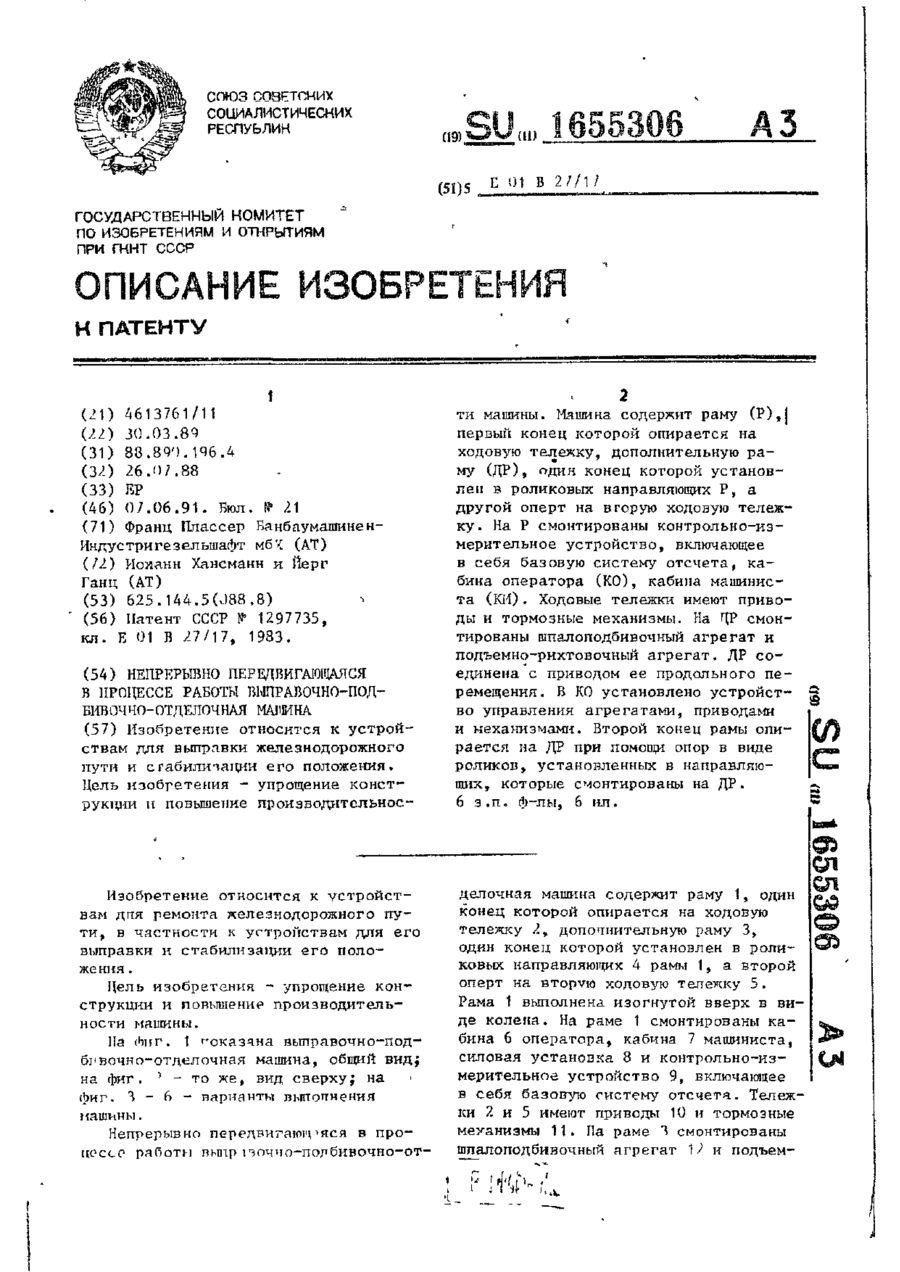
1. Непрерывно передвигающаяся в процессе работы выправочно-подбивочно-отделочная машина, содержащая раму, один конец которой оперт на ходовую тележку, смонтированные на раме кабину оператора, силовую установку, привод ходовой тележки, контрольно-измерительное устройство, включающее в себя базовую систему отсчета, дополнительную раму, один конец которой установлен в направляющих рамы машины, а второй оперт на вторую ходовую тележку, привод...
Пристрій для підбивки шпал та виправлення шляху для шляхової машини з змонтованою на ходових візках рамою
Номер патенту: 3611
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/17
Мітки: ходових, шляху, рамою, шляхової, візках, машини, шпал, підбивки, пристрій, змонтованою, виправлення
Формула / Реферат:
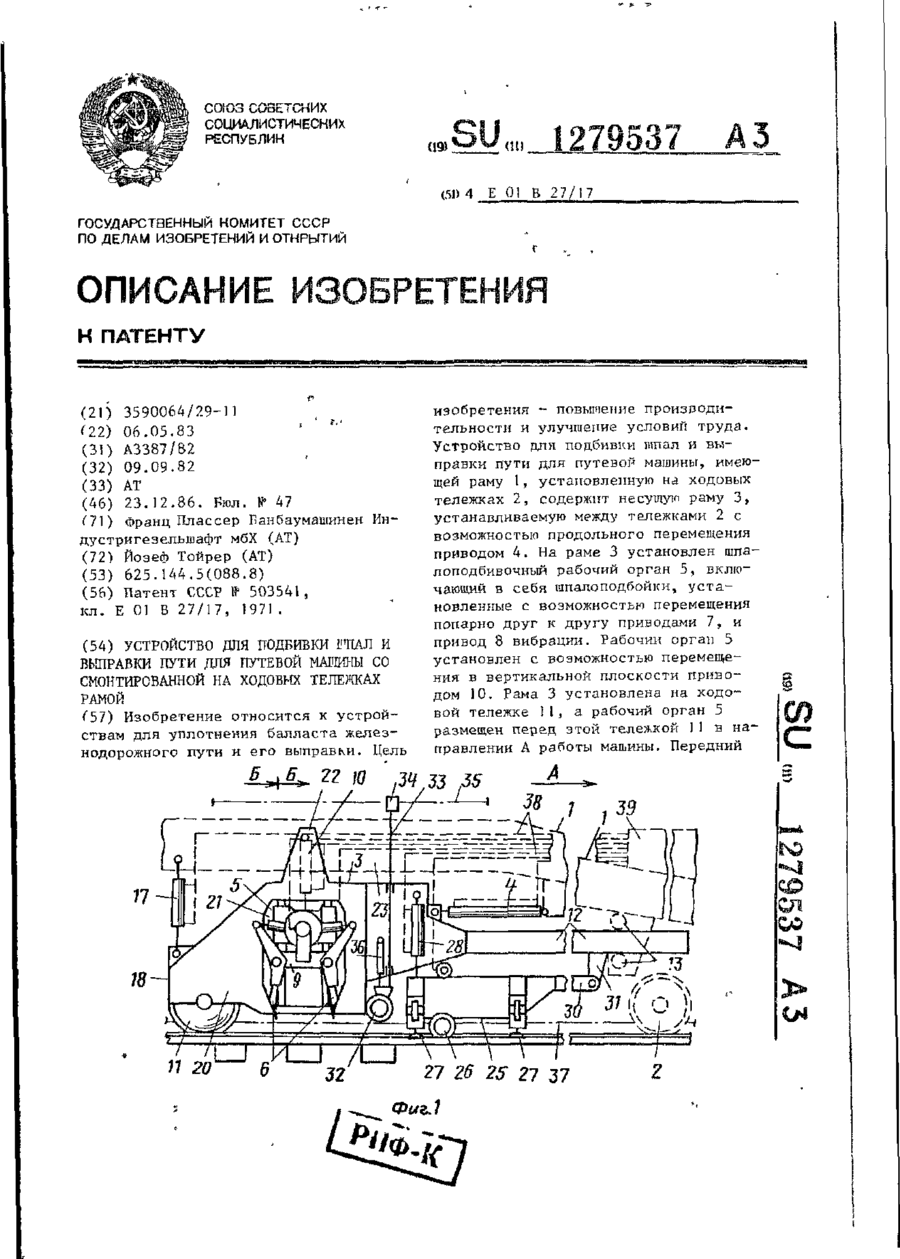
1. Устройство для подбивки шпал и выправки пути для путевой машины со смонтированной на ходовых тележках рамой, содержащее несущую раму, устанавливаемую между указанными ходовыми тележками с возможностью продольного перемещения приводом, шпалоподбивочный рабочий орган, установленный на несущей раме с возможностью перемещения в вертикальной плоскости приводом, смонтированный перед шпало-подбивочным органом по направлению работы машины...
Шпалопідбивочна машина

Номер патенту: 3620
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/16
Мітки: машина, шпалопідбивочна
Формула / Реферат:
Шпалоподбивочная машина, содержащая установленную на ходовые тележки раму, шпалоподбивочный агрегат, смонтированный на раме с возможностью перемещения в вертикальной плоскости приводом и состоящий из инструментальной рамы, установленных на ней шпалоподбивочных инструментов, размещенных по две пары с обеих сторон от продольной оси машины, виброприводов и приводов подачи шпалоподбивочных инструментов, отличающаяся тем, что, с целью...
Машина для розподілу та профілювання баласту залізничної колії
Номер патенту: 3579
Опубліковано: 27.12.1994
Автор: Йозеф Тойрер
МПК: E01B 27/02
Мітки: розподілу, залізничної, машина, баласту, колії, профілювання
Формула / Реферат:
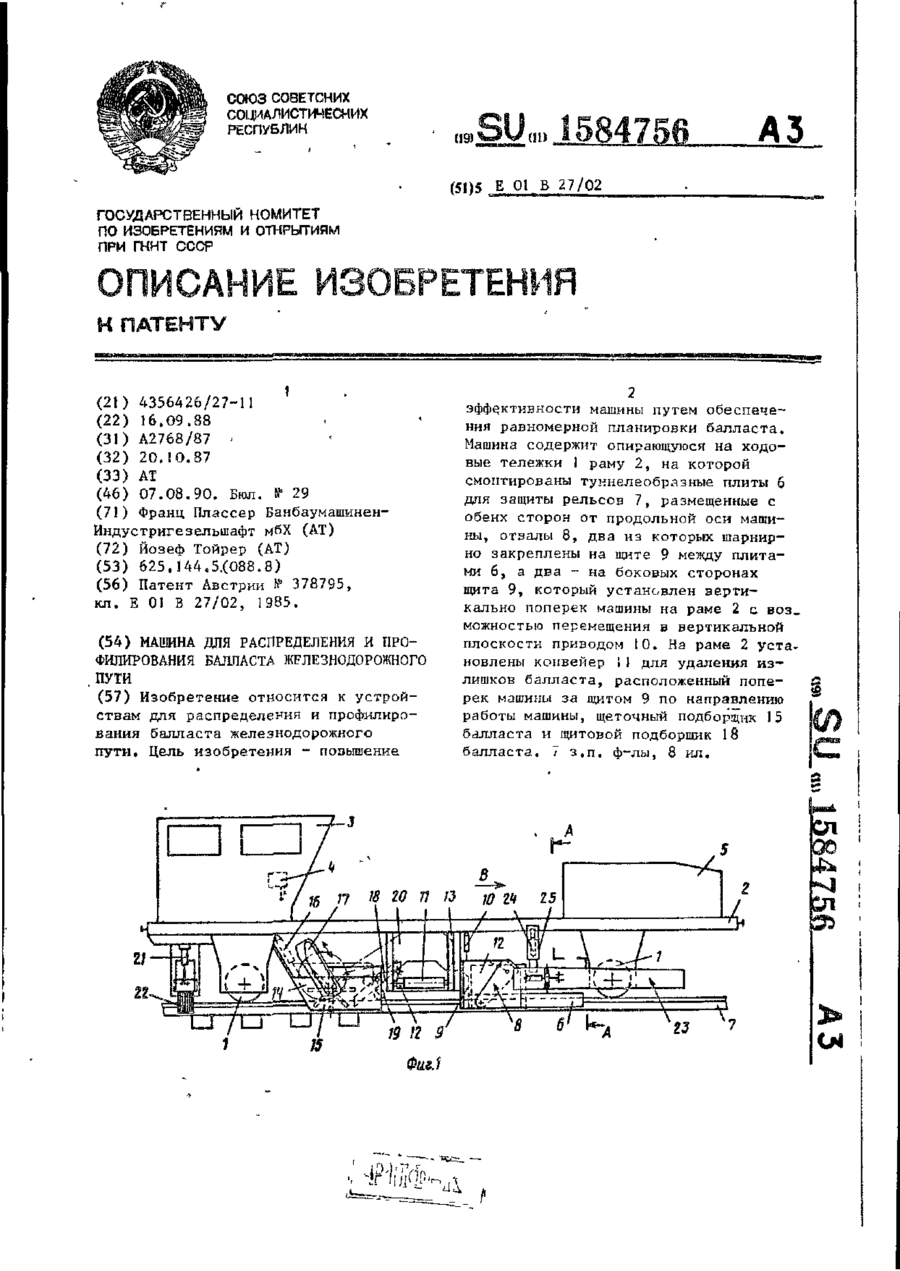
1. Машина для распределения и профилирования балласта железнодорожного пути, содержащая опирающуюся на ходовые тележки раму, смонтированные на ней туннелеобразные плиты для защиты рельсов, размещенные с обеих сторон от продольной оси машины, отвалы, установленные с возможностью поворота приводами вокруг вертикальных осей, конвейер для удаления излишков балласта, расположенный поперек машины, щеточный подборщик балласта, закрепленный на...
Попередній патент: Газовий змішувач з розподільником
Наступний патент: Пересувна шпалопідбивочна нівеліровочна та рихтовочна машина
Випадковий патент: Енергетична установка а. в. молодожонова "истина"