Система контролю параметрів багатофункціональних систем

Формула / Реферат
1. Спосіб вилучення благородних металів із матеріалу, що їх містить, який включає обробку розчином реагенту при опроміненні НВЧ-полем з переведенням благородних металів у розчин, який відрізняється тим, що перед обробкою матеріал піддають механоактивації протягом 5-120 хвилин, при цьому відношення потужності механічної енергії, що підводять до питомої поверхні активованого матеріалу, підтримують у інтервалі 0,0133-25 Вт°кг°м-2, а обробку НВЧ-полем проводять безпосередньо по завершенні механоактивації з використанням як реагенту кислоти і/або окислювача, а після обробки суспензію, що утворилася, подають на фільтр для одержання розчину фільтрату, що містить вилучені благородні метали.
2. Спосіб за п. 1, який відрізняється тим, що опромінення НВЧ-полем ведуть до температури кипіння суміші матеріалу з розчином реагенту.
3. Спосіб за пп. 1, 2, який відрізняється тим, що як кислоту і/або окислювач використовують НСl і/або Сl2, НСl і/або Н2O2, НСl і/або Вr2, НСl і/або NaClO3, НСl і/або НNО3, суміш HF і НСl і/або НNО3, суміш H2SO4 і НСl і/або H2O2, суміш НСl і НВr і/або Н2O2, суміш НСl і Нl і/або NаСlO3 і I2, НСl і/або Сl2 і Вr2.
Текст
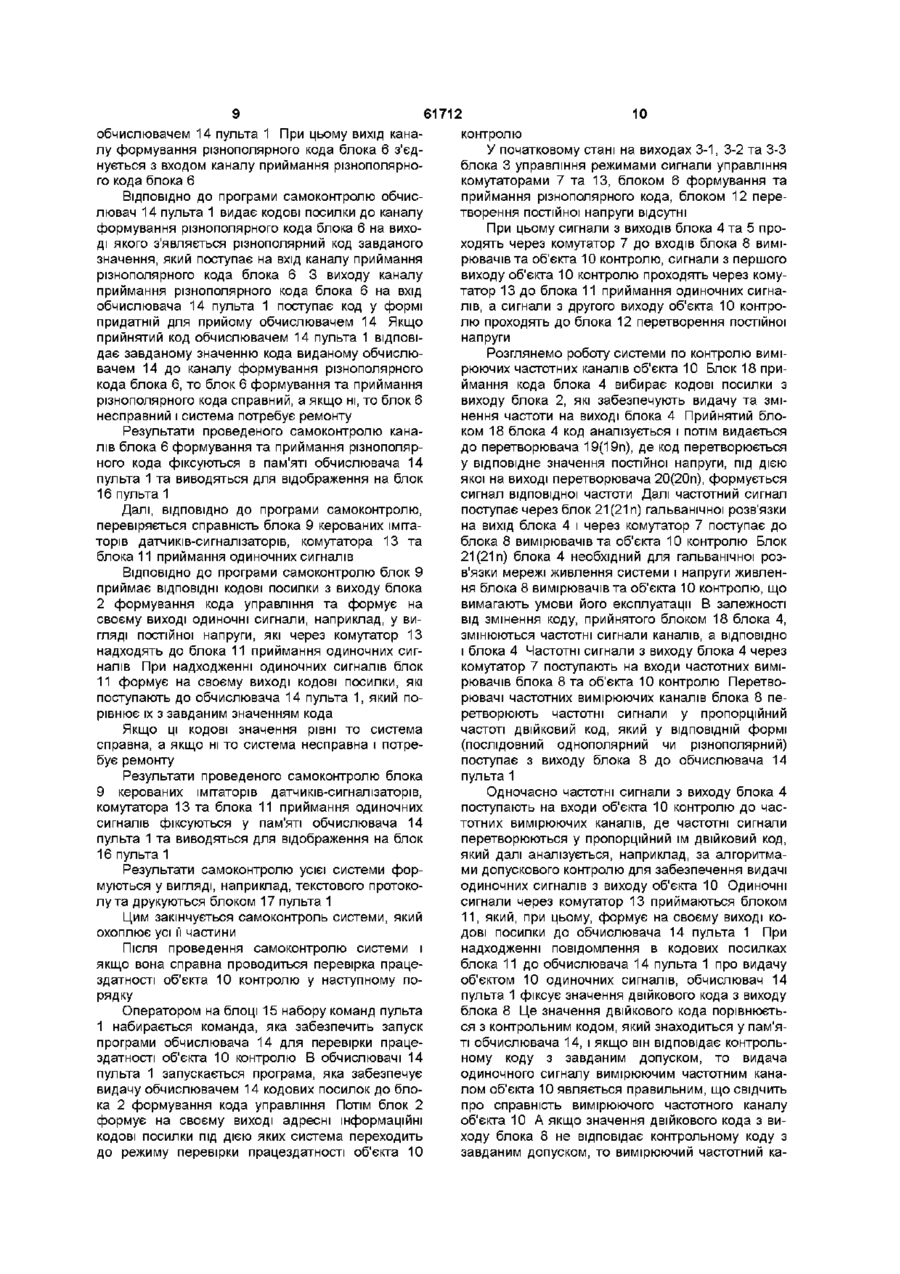
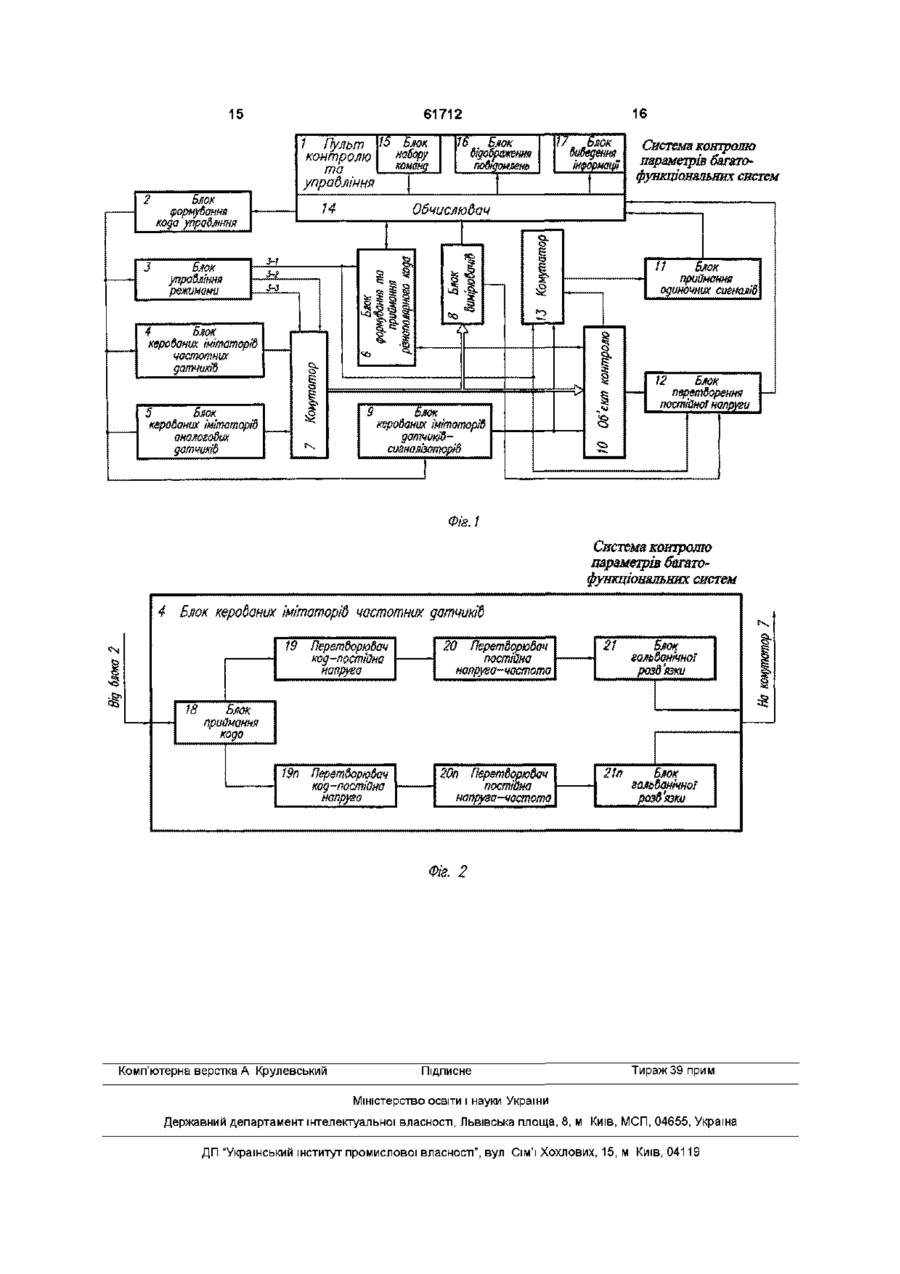
Система контролю параметрів багатофункціональних систем, яка містить блок управління режимами, пульт контролю та управління, блок керованих імітаторів аналогових датчиків, з'єднаний через перший комутатор з блоком вимірювачів та першим виходом системи, другий комутатор, яка відрізняється тим, що в систему додатково введені блок формування коду управління, блок керованих імітаторів частотних датчиків, блок формування та приймання різнополярного коду, блок керованих імітаторів датчиків-сигналізаторів, блок приймання одиночних сигналів, блок перетворення постійної напруги, пульт контролю та управління через блок формування коду управління з'єднаний з блоком управління режимами, блоком керованих імітаторів частотних датчиків, блоком керованих імітаторів аналогових датчиків та блоком керованих імітаторів датчиків-сигналізаторів, вихід якого є другим виходом системи, а через другий комутатор та блок приймання одиночних сигналів з'єднаний з пультом контролю та управління, перший вихід блока управління режимами з'єднаний з блоком формування та приймання різнополярного коду, другим комутатором та блоком перетворення постійної напруги, а другий та третій виходи блока управління режимами з'єднані з управляючими входами першого комутатора, другий інформаційний вхід якого з'єднаний з виходом блока керованих імітаторів частотних датчиків, перший вхід системи з'єднаний з другим комутатором, а другий вхід системи через блок перетворення постійної напруги з'єднаний з входом пульта контролю та управління, ВХІД-ВИХІД якого через блок формування та приймання різнополярного коду з'єднаний з входом-виходом системи, перший вихід блока вимірювачів з'єднаний з пультом контролю та управління, а другий - з блоком перетворення постійної напруги Винахід стосується систем контролю та може бути застосований для контролю багатофункціональних електронних систем різного призначення Система повинна мати функціональні можливості, достатні для вирішення наданого завдання, наприклад, завдання для проведення діагностичного контролю багатофункціональних блоків (систем) різного призначення Система повинна забезпечити високу достовірність контролю параметрів багатофункціональних електронних систем Найближчою за технічною суттю та досягаемому ефекту по відношенню до запропонованого технічного рішення є "Устройство для контролю параметрів" (авт свід колишнього СРСР №1513418 А1, кп G05B23/02), яка має пульт контролю та управління (управляюча обчислювальна машина, блок виведення інформації, термінал), блок керованих імітаторів аналогових датчиків (блок стимулюючих сигналів), з'єднаний через комутатор з блоком вимірювачів Вказана система має недостатні функціональні можливості та область застосування у зв'язку з тим, що вона не забезпечує контроль та діагностування багатофункціональних об'єктів контролю, які крім аналогових вимірюючих каналів мають частотні вимірюючі канали, канали приймання різнополярного кода, канали приймання одиночних сигналів, канали контролю вхідних ланцюгів та видають одиночні сигнали, ПОСТІЙНІ напруги, різнополярний код і т п Багатофункціональні об'єкти контролю можуть ВІДОМІ системи "Автоматизована система контролю параметрів електронних схем" (авт свід колишнього СРСР №1500996 А1, кп G05B23/02), яка містить блок управління режимами з'єднаний з управляючою обчислювальною машиною, комутатор з'єднаний з блоком стимулюючих сигналів, блоком вимірювачів вхідних сигналів Вказана система має обмежені функціональні можливості та область застосування (О 61712 мати будову, наприклад, за технічними рішеннями по патентам України - №51353 А, кл F02C9/28, "Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна", . №46494 А, кл F02C9/28, "Система автоматичного керування, контролю та реєстрації параметрів газотурбінного двигуна", . №40478 А, кп F02C9/28 "Система автоматичного управління та контролю параметрів газотурбінного двигуна" Передбачений винахід направлено на створення системи, яка повинна мати розширені функціональні можливості та область застосування, а також забезпечувати контроль багатофункціональних об'єктів контролю та знизити витрати часу на їх контроль, що дозволить, в свою чергу, скоротити простої техніки на якій використовуються багатофункціональні системи її контролю Метою передбаченого винаходу є розширення функціональних можливостей та області застосування шляхом забезпечення контролю багатофункціональних об'єктів Визначена мета досягається тим, що у відому систему, яка має блок управління режимами, пульт контролю та управління, блок керованих імітаторів аналогових датчиків з'єднаний через перший комутатор з блоком вимірювачів, та другий комутатор, додатково введені блок формування кода управління, блок керованих імітаторів частотних датчиків, блок формування та приймання різнополярного кода, блок керованих імітаторів датчиків-сигналізаторів, блок приймання одиночних сигналів, блок перетворення постійної напруги, пульт контролю та управління через блок формування кода управління з'єднаний з блоком управління режимами, блоком керованих імітаторів частотних датчиків, блоком керованих імітаторів аналогових датчиків та блоком керованих імітаторів датчиків-сигналізаторів, вихід якого є виходом системи, а через другий комутатор та блок приймання одиночних сигналів з'єднаний з пультом контролю та управління, перший вихід блока управління режимами з'єднаний з блоком формування та приймання різнополярного кода, другим комутатором та блоком перетворення постійної напруги, а другий та третій виходи блока управління режимами з'єднані з управляючими входами першого комутатора, другий інформаційний вхід якого з'єднаний з виходом блока керованих імітаторів частотних датчиків, вихід комутатора є другим виходом системи, другий вхід другого комутатора є першим входом системи, а другий вхід системи через блок перетворення постійної напруги з'єднаний з входом пульта контролю та управління, ВХІД-ВИХІД якого через блок формування та приймання різнополярного кода з'єднаний з входом-виходом системи, перший вихід блока вимірювачів з'єднаний з пультом контролю та управління, а другий - з блоком перетворення постійної напруги Введення в систему додаткових ознак, а саме блока формування кода управління, блока керованих імітаторів частотних датчиків, блока керованих імітаторів датчиків-сигналізаторів, блока приймання одиночних сигналів, блока перетво рення постійної напруги, блока формування та приймання різнополярного кода дозволяє розширити функціональні можливості, область застосування та забезпечити контроль багатофункціональних об'єктів контролю, що дозволить, в свою чергу, скоротити простої техніки на якій використовуються багатофункціональні системи її контролю Як видно з вищевказаного, запропоноване технічне рішення має суттєві ознаки, які дозволяють розширити функціональні можливості, область застосування та забезпечити контроль багатофункціональних об'єктів контролю, що дозволить, в свою чергу, скоротити простої техніки на якій використовуються багатофункціональні системи її контролю Принцип роботи системи пояснюється кресленнями де на фіг 1 показана структурна схема системи, на фіг 2 - приклад виконання блока керованих імітаторів частотних датчиків Система містить пульт 1 контролю та управління, блок 2 формування кода управління, блок З управління режимами, блок 4 керованих імітаторів частотних датчиків, блок 5 керованих імітаторів аналогових датчиків, блок 6 формування та приймання різнополярного кода, перший комутатор 7, блок 8 вимірювачів, блок 9 керованих імітаторів датчиків-сигналізаторів, об'єкт 10 контролю, блок 11 приймання одиночних сигналів, блок 12 перетворення постійної напруги, другий комутатор 13 Об'єкт 10 контролю не входить до складу системи Пульт 1 контролю та управління включає обчислювач 14, блок 15 набору команд, блок 16 відображення повідомлень, блок 17 виведення інформації Блок 4 керованих імітаторів частотних датчиків включає блок 18 приймання кода, перетворювач 19 19п код - постійна напруга, перетворювач 20 20п постійна напруга - частота, блок 21 21 п гальванічної розв'язки Пульт 1 контролю та управління через блок 2 формування кода управління з'єднаний з блоком З управління режимами, блоком 4 керованих імітаторів частотних датчиків, блоком 5 керованих імітаторів аналогових датчиків та блоком 9 керованих імітаторів датчиків-сигналізаторів, вихід (перший вихід системи) якого безпосередньо з'єднаний з об'єктом 10 контролю, а через другий комутатор 13 та блок 11 приймання одиночних сигналів з'єднаний з пультом 1 контролю та управління, перший вихід блока 3 управління режимами з'єднаний з блоком 6 формування та приймання різнополярного кода, другим комутатором 13 та блоком 12 перетворення постійної напруги, другий та третій виходи блока 3 управління режимами з'єднаний з управляючими входами комутатора 7, інформаційні входи якого з'єднані з виходами блока 4 керованих імітаторів частотних датчиків та блока 5 керованих імітаторів аналогових датчиків, а вихід (другий вихід системи) комутатора 7 з'єднаний з блоком 8 вимірювачів та об'єктом 10 контролю, перший вихід (перший вхід системи) якого з'єднаний з другим комутатором 13, другий вихід об'єкта 10 контролю (другий вхід системи) через блок 12 перетворення постійної напруги з'єднаний з пультом 1 контролю та управлін 61712 ня, ВХІД-ВИХІД якого через блок 6 формування та приймання різнополярного кода з'єднаний з входом-виходом (ВХІД-ВИХІД системи) об'єкта 10 контролю, перший вихід блока 8 вимірювачів з'єднаний з пультом 1 контролю та управління, а другий - з блоком 12 перетворення постійної напруги Блок 18 приймання кода блока 4 керованих імітаторів частотних датчиків по входу з'єднаний з блоком 2 формування кода управління, а по виходу з'єднаний з n-каналами послідовно з'єднаних перетворювача 19 код-постійна напруга, перетворювача 20 постійна напруга-частота та блока 21 гальванічної розв'язки блока 4 Пульт 1 контролю та управління може бути виконаний на базі стандартного переносного портативного комп'ютера та портативного друкувального пристрою Блок 2 формування кода управління та блок З управління режимами можуть бути виконані на базі стандартних процесорів Блок 5 керованих імітаторів аналогових датчиків може бути виконаний на базі стандартного процесора та стандартних перетворювачів кодпостійна напруга, код-опір, код-змінна напруга та елементів гальванічної розв'язки Блок 6 формування та приймання різнополярного кода може бути виконаний на базі стандартного процесора та стандартних формувачів та приймачів різнополярної напруги Комутатори 7 та 13 можуть бути виконані на базі стандартних ключів з гальванічною розв'язкою або електромеханічних реле Блок 8 вимірювачів може бути виконаний на базі стандартних процесорів, стандартних високоточних елементів мікроелектроніки, наприклад, на базі технічного рішення по патенту України №40478, кл F02C9/28 "Система автоматичного управління та контролю параметрів газотурбінного двигуна" Блок 9 керованих імітаторів датчиківсигналізаторів може бути виконаний на базі стандартного процесора та ключів як електронних так і електромеханічних Блок 11 приймання одиночних сигналів може бути виконаний на базі стандартних елементів гальванічної розв'язки та стандартного процесора Блок 12 перетворення постійної напруги може бути виконаний на базі стандартного процесора, комутатора та перетворювача аналог-код Система працює наступним чином Система забезпечує наступні режими роботи - режим самоконтролю системи, - режим автоматичної одноразової перевірки з фіксацією результатів перевірки на пульту 1 контролю та управління без зупинки при наявності перебоїв в об'єкті 10 контролю, - режим автоматичної одноразової перевірки з фіксацією результатів перевірки на пульту 1 контролю та управління з зупинкою при наявності перебоїв в об'єкті 10 контролю, - покроковий режим роботи з зупинкою після кожного елементарного циклу вимірювання і т п ВІДПОВІДНО ДО програми, яка зберігається у пам'яті обчислювача 14 пульта 1 до блока 2 видаються кодові посилки, під дією яких блок 2 формує на своєму виході адресні коди для управління блоками 3, 4, 5 та 9 В початковому стані на виходах 3-1, 3-2 та 3-3 блока 3 управління режимами сигнали управління комутаторами 7 та 13, блоком 6 формування та приймання різнополярного кода, блоком 12 перетворення постійної напруги відсутні Перед перевіркою працездатності об'єкта 10 контролю проводиться самоконтроль системи у наступному порядку Оператором на блоці 15 набору команд пульта 1 набирається команда під дією якої в обчислювачі 14 пульта 1 запускається програма, яка забезпечує видачу обчислювачем 14 кодових посилок до блока 2 формування кода управління Потім блок 2 формує на своєму виході адресні інформаційні кодові посилки під дією яких система переходить до режиму самоконтролю Блок 3 управляння режимами під дією кодових посилок з блока 2 формує на виході 3-1 сигнал, який забезпечує перехід - блока 6 формування та приймання різнополярного кода в діалоговий режим роботи з обчислювачем 14 пульта 1, - блока 12 в режим перетворення постійної напруги з виходу блока 8 вимірювачів, - комутатора 13 в режим комутації сигналів блока 9 керованих імітаторів датчиківсигналізаторів до блока 11 приймання одиночних сигналів На виходах 3-2, 3-3 блока 3 сигнали відсутні При цьому сигнали імітаторів датчиків з виходів блока 4 та 5 проходять через комутатор 7 до входів блока 8 вимірювачів, сигнали датчиківсигналізаторів з виходу блока 9 проходять через комутатор 13 до блока 11 приймання одиночних сигналів, а постійна напруга з виходу блока 8 вимірювачів надходить до блока 12 де перетворюється у двійковий код Розглянемо роботу системи при самоконтролі вимірюючих частотних каналів блока 8 вимірювачів, та блока 12 перетворення постійної напруги Блок 18 приймання кода блока 4 вибирає кодові посилки з виходу блока 2 Прийнятий блоком 18 блока 4 код аналізується і потім видається до перетворювача 19(19п), де код перетворюється у завдане значення постійної напруги, під дією якої на виході перетворювача 20(20п), формується сигнал завданої частоти Причому, завданій частоті відповідає значення контрольного кода, який зберігається у пам'яті обчислювача 14 пульта 1 Далі частотний сигнал поступає через блок 21 (21 п), гальванічної розв'язки на вихід блока 4 і через комутатор 7 поступає до блока 8 вимірювачів Блок 21 (21 п) блока 4 необхідний для гальванічної розв'язки мережі живлення системи і напруги живлення блока 8 вимірювачів та об'єкта 10 контролю, що вимагають умови його експлуатації Частотні сигнали завданого значення з виходу блока 4 через комутатор 7 поступають на входи частотних вимірювачів блока 8 Перетворювачі частотних вимірюючих каналів блока 8 перетворюють частотні сигнали завданого значення у пропорційний частоті двійковий код, який у ВІДПОВІДНІЙ формі (послідовний однополярний чи різнополярний) поступає з виходу блока 8 до обчислювача 14 пульта 1 61712 Крім того блок 8 вимірювачів видає завдану постійну напругу пропорційну вхідним завданим частотним сигналам Для перевірки працездатності блока 8 вимірювачів та блока 12 перетворення постійної напруги, як було зазначено вище, на виході блока 4 встановлюється частотний сигнал завданого значення, який поступає до блока 8 вимірювачів де перетворюється у двійковий код та постійну напругу завданого значення, яка поступає до блока 12 перетворення постійної напруги Двійковий код, пропорційний завданій ВХІДНІЙ частоті з виходу блока 12 перетворення постійної напруги та блока 8 вимірювачів порівнюється з завданим контрольним кодом, який зберігається у пам'яті обчислювача 14 пульта 1 Якщо код з виходу блока 12 та з виходу блока 8 вимірювачів відповідає контрольному коду обчислювача 14 з завданим допуском, то вимірюючий частотний канал блока 8 та блок 12 являються справними А якщо значення двійкового кода з виходу блока 12 та блока 8 не відповідає контрольному коду з завданим допуском, то вимірюючий частотний канал блока 8 або блок 12 несправний і система потребує ремонту Результати проведеного самоконтролю каналів блока 8 вимірювачів та блока 12 перетворення постійної напруги фіксуються в пам'яті обчислювача 14 та виводяться для відображення на блок 16 пульта 1 Після перевірки працездатності вимірюючих частотних каналів блока 8 ВІДПОВІДНО ДО програми самоконтролю, контролюється працездатність каналів контролю ланцюгів частотних датчиків блока 8 ПОСЛІДОВНІСТЬ контролю працездатності каналів блока 8 по контролю ланцюгів частотних датчиків проводиться у наступному порядку По командам обчислювача 14 пульта 1 до блока 2 видаються кодові посилки, під дією яких блок 2 формує на своєму виході адресні коди, які приймає блок 3 управління режимами Після аналізу прийнятого кода блок 3 на своєму виході 3-2 формує сигнали, які відключають імітатори частотних датчиків блока 4 від частотних входів блока 8 При цьому на виході блока 8 формується кодова посилка, наприклад, у вигляді двійкового кода до обчислювача 14 пульта 1, яка свідчить про порушення ланцюгів частотних датчиків Обчислювач 14 пульта 1 кодову посилку блока 8 вимірювачів порівнює з завданим значенням кода, яке знаходиться у пам'яті обчислювача 14 пульта 1 і якщо вона відповідає завданому кодовому значенню то канали контролю ланцюгів частотних датчиків блока 8 справні, а якщо не відповідає, то канали контролю ланцюгів частотних датчиків блока 8 несправні При цьому система потребує ремонту Після перевірки працездатності каналу контролю ланцюгів частотних датчиків блока 8 сигнали з виходу 32 блока 3 знімаються і частотні сигнали з виходу блока 4 проходять через комутатор 7 до входів блока 8 Результати проведеного самоконтролю каналів контролю ланцюгів частотних датчиків блока 8 фіксуються в пам'яті обчислювача 14 та виводяться для відображення на блок 16 пульта 1 Розглянемо роботу системи по самоконтролю вимірюючих аналогових каналів блока 8 Блок 5 керованих імітаторів аналогових датчиків вибирає 8 кодові посилки з виходу блока 2, які забезпечують видачу аналогових сигналів завданого значення на вихід блока 5 Прийнятий блоком 5 код аналізується і потім видається до ВІДПОВІДНИХ ЙОГО перетворювачів, де код перетворюється у завдане значення постійної напруги, змінної напруги чи опору, які поступають через комутатор 7 до блока 8 вимірювачів Перетворювачі аналогових вимірюючих каналів блока 8 перетворюють аналогові сигнали завданого значення у пропорційний двійковий код, який у ВІДПОВІДНІЙ формі (послідовний однополярний чи різнополярний) поступає з виходу блока 8 до обчислювача 14 пульта 1 Двійковий КОД пропорційний завданому аналоговому сигналу з виходу блока 8 порівнюється з завданим кодом, який знаходиться в пам'яті обчислювача 14 пульта 1 Якщо код з виходу блока 8 відповідає завданому значенню кода з завданим допуском, то вимірюючі аналогові канали блока 8 являються справними А якщо значення двійкового кода з виходу блока 8 не відповідає завданому значенню кода з завданим допуском, то вимірюючі аналогові канали блока 8 несправні і система потребує ремонту Результати проведеного самоконтролю вимірюючих аналогових каналів блока 8 фіксуються в пам'яті обчислювача 14 та виводяться для відображення на блок 16 пульта 1 Після перевірки працездатності вимірюючих аналогових каналів блока 8 ВІДПОВІДНО ДО програми самоконтролю контролюється працездатність каналів контролю ланцюгів аналогових датчиків блока 8 ПОСЛІДОВНІСТЬ контролю працездатності каналів блока 8 по контролю ланцюгів аналогових датчиків проводиться у наступному порядку По командам обчислювача 14 пульта 1 до блока 2 видаються кодові посилки, під дією яких блок 2 формує на своєму виході адресні коди, які приймає блок 3 управління режимами Після аналізу прийнятого кода блок 3 на своєму виході 3-3 формує сигнали, які відключають імітатори аналогових датчиків блока 4 від входів блока 8 При цьому на виході блока 8 формується кодова посилка, наприклад, у вигляді двійкового кода до обчислювача 14 пульта 1, яка свідчить про порушення ланцюгів аналогових датчиків Обчислювач 14 пульта 1 кодову посилку блока 8 порівнює з завданим значенням кода, який зберігається у пам'яті обчислювача 14 пульта 1 і якщо вона відповідає завданому кодовому значенню, то канали контролю ланцюгів аналогових датчиків блока 8 справні, а якщо не відповідає, то канали контролю ланцюгів аналогових датчиків блока 8 несправні При цьому система потребує ремонту Після перевірки працездатності каналів контролю ланцюгів аналогових датчиків блока 8 сигнали з виходу 3-3 блока 3 знімаються і аналогові сигнали з виходу блока 5 проходять через комутатор 7 до входів блока 8 Результати проведеного самоконтролю каналів контролю ланцюгів аналогових датчиків блока 8 фіксуються у пам'яті обчислювача 14 та виводяться для відображення на блок 16 пульта 1 Як було зазначено вище блок 3 управління режимами під дією кодових посилок з блока 2 формує на виході 3-1 сигнал, який забезпечує перехід блока 6 формування та приймання різнополярного кода в діалоговий режим роботи з 61712 обчислювачем 14 пульта 1 При цьому вихід каналу формування різнополярного кода блока 6 з'єднується з входом каналу приймання різнополярного кода блока 6 ВІДПОВІДНО ДО програми самоконтролю обчислювач 14 пульта 1 видає кодові посилки до каналу формування різнополярного кода блока 6 на виході якого з'являється різнополярний код завданого значення, який поступає на вхід каналу приймання різнополярного кода блока 6 3 виходу каналу приймання різнополярного кода блока 6 на вхід обчислювача 14 пульта 1 поступає код у формі придатній для прийому обчислювачем 14 Якщо прийнятий код обчислювачем 14 пульта 1 відповідає завданому значенню кода виданому обчислювачем 14 до каналу формування різнополярного кода блока 6, то блок 6 формування та приймання різнополярного кода справний, а якщо ні, то блок 6 несправний і система потребує ремонту Результати проведеного самоконтролю каналів блока 6 формування та приймання різнополярного кода фіксуються в пам'яті обчислювача 14 пульта 1 та виводяться для відображення на блок 16 пульта 1 Далі, ВІДПОВІДНО до програми самоконтролю, перевіряється справність блока 9 керованих імітаторів датчиків-сигналізаторів, комутатора 13 та блока 11 приймання одиночних сигналів ВІДПОВІДНО ДО програми самоконтролю блок 9 приймає ВІДПОВІДНІ кодові посилки з виходу блока 2 формування кода управління та формує на своєму виході одиночні сигнали, наприклад, у вигляді постійної напруги, які через комутатор 13 надходять до блока 11 приймання одиночних сигналів При надходженні одиночних сигналів блок 11 формує на своєму виході кодові посилки, які поступають до обчислювача 14 пульта 1, який порівнює їх з завданим значенням кода Якщо ці кодові значення рівні то система справна, а якщо ні то система несправна і потребує ремонту Результати проведеного самоконтролю блока 9 керованих імітаторів датчиків-сигналізаторів, комутатора 13 та блока 11 приймання одиночних сигналів фіксуються у пам'яті обчислювача 14 пульта 1 та виводяться для відображення на блок 16 пульта 1 Результати самоконтролю усієї системи формуються у вигляді, наприклад, текстового протоколу та друкуються блоком 17 пульта 1 Цим закінчується самоконтроль системи, який охоплює усі її частини Після проведення самоконтролю системи і якщо вона справна проводиться перевірка працездатності об'єкта 10 контролю у наступному порядку Оператором на блоці 15 набору команд пульта 1 набирається команда, яка забезпечить запуск програми обчислювача 14 для перевірки працездатності об'єкта 10 контролю В обчислювачі 14 пульта 1 запускається програма, яка забезпечує видачу обчислювачем 14 кодових посилок до блока 2 формування кода управління Потім блок 2 формує на своєму виході адресні інформаційні кодові посилки під дією яких система переходить до режиму перевірки працездатності об'єкта 10 10 контролю У початковому стані на виходах 3-1, 3-2 та 3-3 блока 3 управління режимами сигнали управління комутаторами 7 та 13, блоком 6 формування та приймання різнополярного кода, блоком 12 перетворення постійної напруги відсутні При цьому сигнали з виходів блока 4 та 5 проходять через комутатор 7 до входів блока 8 вимірювачів та об'єкта 10 контролю, сигнали з першого виходу об'єкта 10 контролю проходять через комутатор 13 до блока 11 приймання одиночних сигналів, а сигнали з другого виходу об'єкта 10 контролю проходять до блока 12 перетворення постійної напруги Розглянемо роботу системи по контролю вимірюючих частотних каналів об'єкта 10 Блок 18 приймання кода блока 4 вибирає кодові посилки з виходу блока 2, які забезпечують видачу та змінення частоти на виході блока 4 Прийнятий блоком 18 блока 4 код аналізується і потім видається до перетворювача 19(19п), де код перетворюється у відповідне значення постійної напруги, під дією якої на виході перетворювача 20(20п), формується сигнал відповідної частоти Далі частотний сигнал поступає через блок 21 (21 п) гальванічної розв'язки на вихід блока 4 і через комутатор 7 поступає до блока 8 вимірювачів та об'єкта 10 контролю Блок 21 (21 п) блока 4 необхідний для гальванічної розв'язки мережі живлення системи і напруги живлення блока 8 вимірювачів та об'єкта 10 контролю, що вимагають умови його експлуатації В залежності від змінення коду, прийнятого блоком 18 блока 4, змінюються частотні сигнали каналів, а ВІДПОВІДНО І блока 4 Частотні сигнали з виходу блока 4 через комутатор 7 поступають на входи частотних вимірювачів блока 8 та об'єкта 10 контролю Перетворювачі частотних вимірюючих каналів блока 8 перетворюють частотні сигнали у пропорційний частоті двійковий код, який у ВІДПОВІДНІЙ формі (послідовний однополярний чи різнополярний) поступає з виходу блока 8 до обчислювача 14 пульта 1 Одночасно частотні сигнали з виходу блока 4 поступають на входи об'єкта 10 контролю до частотних вимірюючих каналів, де частотні сигнали перетворюються у пропорційний їм двійковий код, який далі аналізується, наприклад, за алгоритмами допускового контролю для забезпечення видачі одиночних сигналів з виходу об'єкта 10 Одиночні сигнали через комутатор 13 приймаються блоком 11, який, при цьому, формує на своєму виході кодові посилки до обчислювача 14 пульта 1 При надходженні повідомлення в кодових посилках блока 11 до обчислювача 14 пульта 1 про видачу об'єктом 10 одиночних сигналів, обчислювач 14 пульта 1 фіксує значення двійкового кода з виходу блока 8 Це значення двійкового кода порівнюється з контрольним кодом, який знаходиться у пам'яті обчислювача 14, і якщо він відповідає контрольному коду з завданим допуском, то видача одиночного сигналу вимірюючим частотним каналом об'єкта 10 являється правильним, що свідчить про справність вимірюючого частотного каналу об'єкта 10 А якщо значення двійкового кода з виходу блока 8 не відповідає контрольному коду з завданим допуском, то вимірюючий частотний ка 12 11 61712 нал несправний і об'єкт 10 потребує ремонту КІЛЬвидачу та змінення аналогових сигналів на виході КІСТЬ одиночних сигналів, які видаються вимірююблока 5 Прийнятий блоком 5 код аналізується і чими частотними каналами об'єкта 10 залежить потім видається до ВІДПОВІДНИХ ЙОГО перетворювавід алгоритму його функціонування чів, де код перетворюється у відповідне значення постійної напруги, змінної напруги чи опору, які Крім того об'єкт 10 видає постійну напругу поступають через комутатор 7 до блока 8 вимірюпропорційну вхідним частотним сигналам вачів та об'єкта 10 В залежності від змінення коду, Для перевірки працездатності каналів об'єкта прийнятого блоком 5, змінюються аналогові сигна10, які видають постійну напругу пропорційну вхідли каналів на його виході Аналогові сигнали з виним частотним сигналам на блок 12 перетворення ходу блока 5 через комутатор 7 поступають на постійної напруги, на виході блока 4 встановлювходи аналогових вимірювачів блока 8 та об'єкта ється частотний сигнал завданого значення, який 10 контролю Перетворювачі аналогових вимірююпоступає також до блока 8 вимірювачів де перечих каналів блока 8 перетворюють аналогові сигтворюється у двійковий код Двійковий КОД пропонали у пропорційний аналоговим сигналам двійкорційний завданій ВХІДНІЙ частоті з виходу блока 12 вий код, який у ВІДПОВІДНІЙ формі (послідовний перетворення постійної напруги порівнюється з однополярний чи різнополярний) поступає з вихокодом, який надходить з виходу вимірюючого часду блока 8 до обчислювача 14 пульта 1 тотного каналу блока 8 Якщо код з виходу блока 12 відповідає коду з виходу вимірюючого частотОдночасно аналогові сигнали з виходу блока 5 ного каналу блока 8 з завданим допуском, то виміпоступають на входи об'єкта 10 контролю до анарюючий частотний канал об'єкта 10 являється логових вимірюючих каналів, де аналогові сигнали справним А якщо значення двійкового кода з виперетворюються у пропорційний їм двійковий код, ходу блока 12 не відповідає коду з виходу виміякий далі аналізується, наприклад, за алгоритмарюючого частотного каналу блока 8 з завданим ми допускового контролю для забезпечення видачі допуском, то вимірюючий частотний канал об'єкта одиночних сигналів з виходу об'єкта 10 Одиночні 10 несправний і він потребує ремонту сигнали з виходу об'єкта 10 через комутатор 13 приймаються блоком 11, який, при цьому, формує Після перевірки працездатності вимірюючих на своєму виході кодові посилки до обчислювача частотних каналів об'єкта 10 ВІДПОВІДНО ДО про14 пульта 1 При надходженні повідомлення в кограми контролюється працездатність каналів контдових посилках блока 11 до обчислювача 14 пульролю ланцюгів частотних датчиків об'єкта 10 ПОта 1 про видачу об'єктом 10 одиночних сигналів, СЛІДОВНІСТЬ контролю працездатності каналів обчислювач 14 пульта 1 фіксує значення двійковооб'єкта 10 по контролю ланцюгів частотних датчиго кода з виходу блока 8 Це значення двійкового ків проводиться у наступному порядку кода, порівнюється з контрольним кодом, який По командам обчислювача 14 пульта 1 до знаходиться у пам'яті обчислювача 14 пульта 1 і блока 2 видаються кодові посилки, під дією яких якщо він відповідає контрольному коду з завданим блок 2 формує на своєму виході адресні коди, які допуском, то видача одиночного сигналу вимірююприймає блок 3 управління режимами Після аначим аналоговим каналом об'єкта 10 являється лізу прийнятого кода блок 3 на своєму виході 3-2 правильним Що свідчить про справність вимірююформує сигнали, які відключають імітатори часточого аналогового каналу об'єкта 10 А якщо знатних датчиків блока 4 від входів блока 8 та об'єкта чення двійкового кода з виходу блока 8 не відпові10 При цьому на виході блока 8 формується кододає контрольному коду з завданим допуском, то ва посилка, наприклад, у вигляді двійкового кода вимірюючий аналоговий канал несправний і об'єкт до обчислювача 14 пульта 1, яка свідчить про по10 потребує ремонту, КІЛЬКІСТЬ ОДИНОЧНИХ сигнарушення ланцюгів частотних датчиків Якщо каналів, які видаються вимірюючим аналоговим канали об'єкта 10 по контролю ланцюгів частотних далом об'єкта 10 залежить від алгоритму його функтчиків справні, то з його виходу через комутатор ціонування 13 будуть видаватися одиночні сигнали, які приймаються блоком 11 і який, в свою чергу, формує Крім того об'єкт 10 видає постійну напругу кодову посилку, наприклад, у вигляді двійкового пропорційну вхідним аналоговим сигналам кода до обчислювача 14 пульта 1, яка свідчить про Для перевірки працездатності каналів об'єкта порушення ланцюгів частотних датчиків Обчис10, які видають постійну напругу пропорційну вхідлювач 14 пульта 1 кодову посилку блока 11 порівним аналоговим сигналам до блока 12 перетвонює з кодовою посилкою блока 8 і якщо вона відрення постійної напруги, на виході блока 4 встаноповідає кодовому значенню блока 8 то канал влюється завданий аналоговий сигнал, який об'єкта 10 по контролю ланцюгів частотних датчипоступає також до блока 8 вимірювачів де переків справний, а якщо не відповідає то канал об'єкта творюється у двійковий код Двійковий КОД пропо10 по контролю ланцюгів частотних датчиків нерційний завданому аналоговому сигналу з виходу справний При цьому об'єкт 10 потребує ремонту блока 12 перетворення постійної напруги порівнюПісля перевірки працездатності каналу контролю ється з кодом, який надходить з виходу вимірююланцюгів частотних датчиків об'єкта 10 сигнали з чого аналогового каналу блока 8 Якщо код з вивиходу 3-2 блока 3 знімаються і частотні сигнали з ходу блока 12 відповідає коду з виходу виходу блока 4 проходять через комутатор 7 до вимірюючого аналогового каналу блока 8 з завдавходів блока 8 та об'єкта 10 ним допуском, то вимірюючий аналоговий канал об'єкта 10 являється справним А якщо значення Розглянемо роботу системи по контролю вимідвійкового кода з виходу блока 12 не відповідає рюючих аналогових каналів об'єкта 10 Блок 5 кекоду з виходу вимірюючого аналогового каналу рованих імітаторів аналогових датчиків вибирає блока 8 з завданим допуском, то вимірюючий анакодові посилки з виходу блока 2, які забезпечують 14 13 61712 логовий канал об'єкта 10 несправний і він потреблока 11 до обчислювача 14 пульта 1 про видачу бує ремонту об'єктом 10 одиночних сигналів, обчислювач 14 пульта 1 порівнює його з контрольним кодом, який Після перевірки працездатності вимірюючих знаходиться у його пам'яті, який, в свою чергу, аналогових каналів об'єкта 10 ВІДПОВІДНО ДО прозабезпечив формування команди блоком 2 до грами контролюється працездатність каналів об'блока 9 і якщо він відповідає контрольному коду, єкта 10 по контролю ланцюгів аналогових датчиків то видача одиночного сигналу вимірюючим аналоПОСЛІДОВНІСТЬ контролю працездатності каналів говим чи частотним каналом об'єкта 10 являється об'єкта 10 по контролю ланцюгів аналогових датправильним Це свідчить про справність каналу чиків проводиться у наступному порядку приймання одиночних сигналів об'єкта 10 А якщо По командам обчислювача 14 пульта 1 до значення двійкового кода з виходу блока 11 не блока 2 видаються кодові посилки, під дією яких відповідає контрольному коду, то канал приймання блок 2 формує на своєму виході адресні коди, які одиночних сигналів об'єкта 10 несправний і він приймає блок 3 управління режимами Після анапотребує ремонту КІЛЬКІСТЬ ОДИНОЧНИХ сигналів, лізу прийнятого кода блок 3 на своєму виході 3-3 які видаються вимірюючим аналоговим чи частотформує сигнали, які відключають імітатори аналоним каналом об'єкта 10 при наявності на його вхогових датчиків блока 4 від входів блока 8 та об'єкді одиночних сигналів з виходу блока 9 залежить та 10 При цьому на виході блока 8 формується від алгоритму функціонування об'єкта 10 кодова посилка, наприклад, у вигляді двійкового кода до обчислювача 14 пульта 1, яка свідчить про ВІДПОВІДНО ДО програми контролю об'єкта 10 порушення ланцюгів аналогових датчиків Якщо обчислювач 14 пульта 1 видає кодові посилки до канали контролю ланцюгів аналогових датчиків каналу формування різнополярного кода блока 6 об'єкта 10 справні, то з його виходу будуть видана виході якого з'являється різнополярний код заватися одиночні сигнали, які через комутатор 13 вданого значення, який поступає на вхід каналу приймаються блоком 11 і який, в свою чергу, форприймання різнополярного кода об'єкта 10 Об'єкт мує кодову посилку, наприклад, у вигляді двійково10 прийнятий різнополярний код аналізує по заго кода до обчислювача 14 пульта 1, яка свідчить вданому алгоритму, а результат аналізу у вигляді про порушення ланцюгів аналогових датчиків Обзавданого кодового значення видає різнополярним числювач 14 пульта 1 кодову посилку блока 11 кодом до каналу приймання різнополярного кода порівнює з кодовою посилкою блока 8 і якщо вона блока 6 3 виходу канала приймання різнополярвідповідає кодовому значенню блока 8 то канал ного кода блока 6 на вхід обчислювача 14 пульта 1 об'єкта 10 по контролю ланцюгів аналогових датпоступає код у формі придатній для прийому обчиків справний, а якщо не відповідає, то канал числювачем 14 Якщо прийнятий код обчислюваоб'єкта 10 по контролю ланцюгів аналогових датчем 14 пульта 1 відповідає завданому значенню чиків несправний При цьому об'єкт 10 потребує кода, який зберігається у пам'яті обчислювача 14 ремонту пульта 1 то канал приймання та формування різнополярного кода об'єкта 10 справний, а якщо ні, Після перевірки працездатності каналу контто об'єкт 10 потребує ремонту ролю ланцюгів аналогових датчиків об'єкта 10 сигнали з виходу 3-3 блока 3 знімаються і аналогові сигнали з виходу блока 5 проходять через комутатор 7 до входів блока 8 та об'єкта 10 ВІДПОВІДНО ДО програми контролю об'єкта 10 блок 9 приймає ВІДПОВІДНІ КОДОВІ ПОСИЛКИ З виходу блока 2 формування кода управління та формує на своєму виході одиночні сигнали, наприклад, у вигляді постійної напруги, які надходять до об'єкта 10 контролю При надходженні одиночних сигналів з блока 9 до об'єкта 10 контролю, останній використовує їх в алгоритмах допускового контролю при формуванні сигналів по частотним та аналоговим вхідним сигналам та видає одиночні сигнали через комутатор 13 до блока 11 приймання одиночних сигналів При цьому, блок 11 формує на своєму виході кодові посилки до обчислювача 14 пульта 1 При надходженні повідомлення в кодових посилках Результати перевірки працездатності об'єкта 10 фіксуються у пам'яті обчислювача 14 пульта 1 та виводяться на блок 16 для відображення і друкуються, наприклад, у вигляді текстових протоколів блоком 17 Очікуваний винахід дозволяє розширити функціональні можливості та область застосування, а також забезпечити перевірку працездатності багатофункціональних об'єктів контролю, що дозволить, в свою чергу, скоротити простої техніки, наприклад, літального апарата на якому використовуються багатофункціональні системи його контролю Крім того, система забезпечує самоконтроль усіх и елементів, що дозволяє, в свою чергу, забезпечити високу достовірність результатів контролю об'єкта 10 15 1 Пульт 15 Бяок набору контролю команд та упрабміння 2 Блок формування кода упрабтня 3 Блок упрабяіння режимами 4 16 61712 14 16 Блок 17 _ БЛОК інформації Система контролю параметрів багатофункціональних систем ОбчислюЬач Бяок приймання одиночних сивнапіб 11 3-І з-з 1 3 1 БЛОК керованих Імітатор/б частотних датчиюб f ! 9 керобаних імітаторіб аналогобих датчиків Блок керобаних ІмітаторІ5 датчшібсизналізаторіб І 12 перетворення постійної напруги Фіг. 1 Система контролю параметрів багатофункціональних систем 4 Блок кероЬонш імітаторів частотних датчтїб 19 Пєрешборюбач код-постіОно напруга 20 ПєретЬорюбач постійна напруга-частота 21 Бщ еальданІчної розв'язки Блок приймання кода 19п Перетборюбач код-постійна напруго 20п Перетборюбач постійна напруга-частопю 21п Бщ гальЬанІчної розЬ'тт Фіг. 2 Комп'ютерна верстка А Крулевський Підписне Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ДП "Український інститут промислової власності", вул Сім'ї Хохлових, 15, м Київ, 04119
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for monitoring parameters of a multifunctional system
Автори англійськоюBezschastnyi Vasyl Oleksiiovych
Назва патенту російськоюУстройство для контроля параметров многофункциональной системы
Автори російськоюБессчастный Василий Алексеевич
МПК / Мітки
МПК: G05B 23/02
Мітки: параметрів, система, систем, контролю, багатофункціональних
Код посилання
<a href="https://ua.patents.su/8-61712-sistema-kontrolyu-parametriv-bagatofunkcionalnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Система контролю параметрів багатофункціональних систем</a>
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 31643
Опубліковано: 15.07.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 15/16
Мітки: літального, параметрів, реєстрації, система, контролю, апарата, силової, установки
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок обчислювача, послідовно з’єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з’єднаний з блоком обчислювача та комутатором, яка відрізняється тим, що в систему додатково введені два блоки формувачів, два перетворювачі частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 60613
Опубліковано: 15.10.2003
Автори: Дробінов Вадим Павлович, Безсчастний Микола Олексійович, БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 15/00
Мітки: реєстрації, літального, силової, контролю, апарата, установки, параметрів, система
Формула / Реферат:
Спосіб виготовлення газобетонних виробів включає активацію газобетонної суміші на стадії інтенсивного спучування у постійному високовольтному електричному полі з негативним контактним електродом. Активацію проводять протягом 15-18 хвилин при напруженості електричного поля 11,7-13,5 кВ/см та силі струму 23-27 . Забезпечується підвищення міцності газобетонних виробів при...
Система автоматичного контролю параметрів газотурбінного двигуна
Номер патенту: 39279
Опубліковано: 15.07.2003
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: система, двигуна, контролю, газотурбінного, параметрів, автоматичного
Формула / Реферат:
Система автоматичного контролю параметрів газотурбінного двигуна, яка містить блок формувачів, обчислювач, з'єднаний з виходом кожного з двох операційних блоків, та послідовно з'єднані блок нормалізаторів, комутатор та аналого-цифровий перетворювач, другий вхід комутатора з'єднаний з другим виходом першого операційного блока, яка відрізняється тим, що додатково введені блок контролю вхідних ланцюгів, блок еталонів, другий комутатор, блок...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 54605
Опубліковано: 17.03.2003
Автори: Дробінов Вадим Павлович, БЕЗСЧАСТНИЙ Василь Олексійович, Ісак Омелян Гаврилович
МПК: F02C 9/28, G06F 15/16
Мітки: літального, параметрів, контролю, система, установки, силової, реєстрації, апарата
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка має блок нормалізаторів, першим виходом через послідовно з'єднані комутатор, аналого-цифровий перетворювач та операційний блок з'єднаний з першим входом блока обчислювача, другий вихід блока нормалізаторів через блок контролю датчиків з'єднаний з шинним формувачем та блоком автоматичного керування, другий вхід якого з'єднаний з третім виходом блока...
Багатоканальна система контролю параметрів газотурбінної установки
Номер патенту: 49036
Опубліковано: 16.09.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/00
Мітки: система, багатоканальна, установки, параметрів, контролю, газотурбінної
Формула / Реферат:
Багатоканальна система контролю параметрів газотурбінної установки, яка містить генератор еталонної частоти, елемент АБО, послідовно з'єднані блок формувачів, блок сигналізаторів та блок елементів І, який відрізняється тим, що додатково уведені блок комутації частоти, операційний блок, блок керованих узгоджуючих пристроїв, джерело напруги, блок компараторів, блок одновібраторів та блок конденсаторів входи якого з'єднані з вхідними ланцюгами...
Попередній патент: Вентиляційна решітка
Наступний патент: 2,4,6-трис(фторосульфоніл)фенол та його солі лужних і лужноземельних металів
Випадковий патент: Спосіб перепрограмування функції жувальних м'язів і м'язів шиї